Servo из шагового мотора - Потенциометр, Arduino, Step, Dir...
Показать полностью
2
- Двигатели оси Y и экструдера Moons С17 как у версии 3 Pro, ось X - BJ42D15
- Плата 32 битная 4,2,2 Можно подключать датчик окончания филаменат, BL Touch и прочее.
- Новое крепление стола.
- Запресованые на валу двигателя шестерни.
Мир столкнулся с проблемой электронных отходов, и Африка, в частности, также оказалась в тяжелом положении. Большие пространства превратились в места захоронения, заполненные множеством старых телефонов, металлолома и телевизоров, которые попали сюда из других частей света.
Эти «цифровые свалки» распространены по всей Африке, что только создает нагрузку на окружающую среду и сказывается на здоровье жителей.
Около шести лет назад, базирующаяся в Того инновационная лаборатория WoeLab, совершила необычайный подвиг, когда собрала команду, создавшую первый африканский 3D-принтер.

Но это еще не все: достижение стало результатом поездок на так называемые цифровые свалки - что делает этот факт еще более впечатляющим.
Команда собирала тонны электронных отходов, прежде чем использовать их заново. Результатом нескольких месяцев работы стал 3D-принтер, который полностью сделан в Африке.
Когда 37-летний Сенамэ Кофи Агбоджину взял на себя сложную задачу по созданию общественного технологического центра на своей родине, тех кто верил в это проект - было не много. Но его мечта сбылась.
Сенаме, который сам является архитектором, приобрел 3D-принтер для лаборатории. С того момента, как 3D-принтер прибыл в помещение, молодые исследователи гудели от восхищения и трепета. Эти чувства вскоре уступили место любопытству, и вскоре шепот перерос в громкие призывы к совместной работе над чем-то похожим, используя имеющиеся ресурсы - лом.

В течение года собирались необходимые части старых компьютеров, принтеров и сканеров. И команда создала свой первый 3D-принтер.
Это было в 2013 году, и это стало всего лишь началом. С тех пор команда создала еще 20 готовых изделий из электронных отходов, и, похоже, в ближайшем будущем их станет еще больше.

Новейшие модификации WoeLab были результатом совместных усилий, когда несколько человек сотрудничали в проекте и в конечном итоге довели его до успешного завершения.
Хотя 3D-принтер представляет собой большую победу, команда не останавливается на достигнутом и надеется совершить техническую революцию на всем континенте.
Приветствую!
Данный длиннопост будет об изготовлении оборудования (громко сказано) для проведения различных викторин и конкурсов. Прошу снисхождения у всех "профессионалов", у которых потечет кровь из глаз от моего рукожопства - я всего лишь любитель, и не стоит рассматривать все нижесказанное как инструкцию к действию) В свое оправдание могу лишь сказать что у меня была цель сделать работающее устройство с минимальными затратами сил и средств, и эта цель была успешно достигнута.
Для тех кому лень читать пост, приложу небольшое видео с процессом
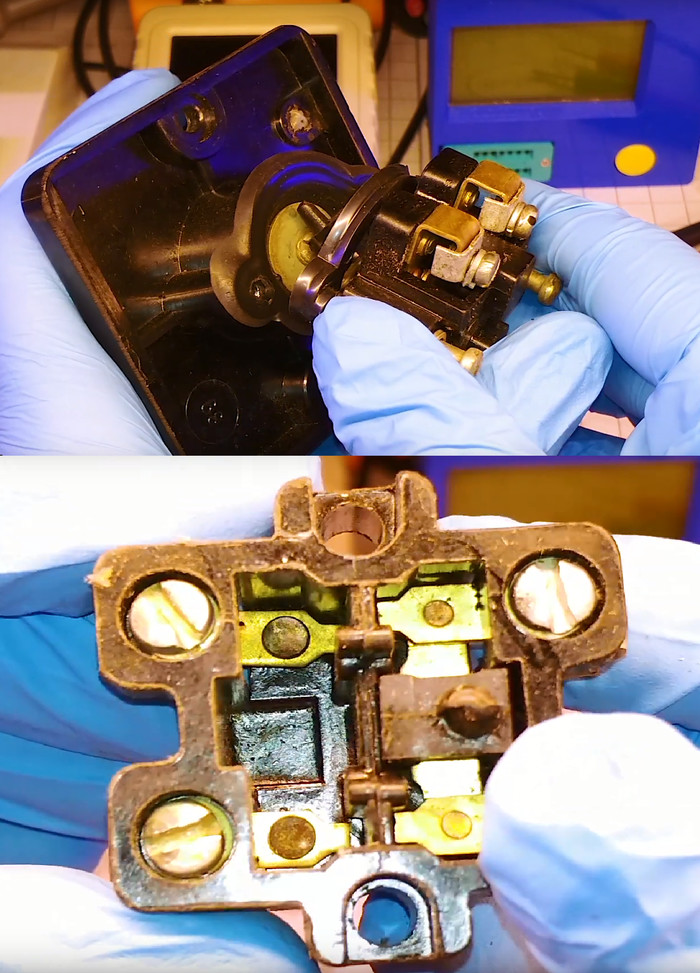
Потребность в данной штуковине возникла у моего брата, когда он готовился к проведению конкурса в институте. Им же и были куплены по объявлению вот такие кнопки аварийного останова:
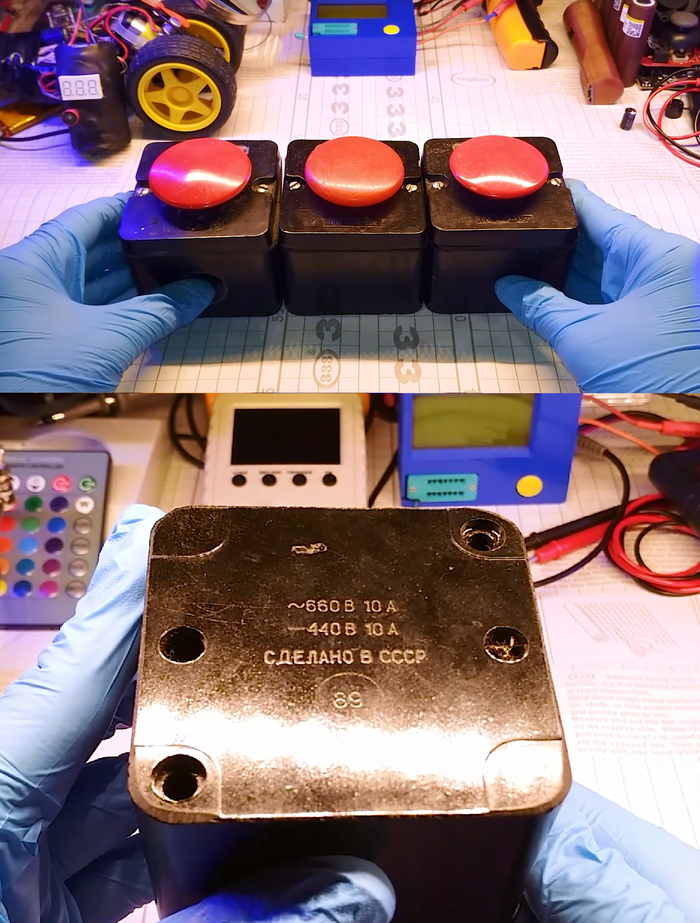
Кнопки обладают достаточно большими габаритам, чтобы по ним было удобно бить ладонью, при этом не боясь сломать. А сломать вряд ли получится, сделано на века.
Каждую кнопку пришлось разобрать и тщательно чистить, в том числе и окисленные контакты.
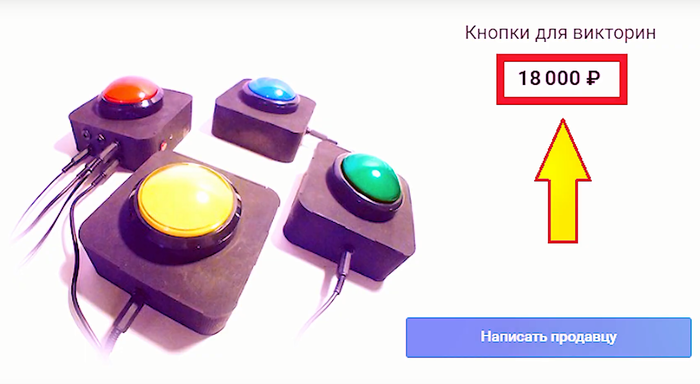
Возможно у вас возник вопрос, а зачем вообще заниматься изготовлением подобного устройства, если можно купить что-то готовое?
В продаже я не нашел ничего приемлемого по цене, максимум попадалось подобные объявления VK:
Рассматривался также вариант купить три беспроводных звонка, и пытаться изготовить устройство на их основе

Но от этой идеи пришлось отказаться по следующим причинам:
1) Невозможно будет заблокировать другие кнопки при срабатывании одной
2) Возможные конфликты сигналов кнопок. Ведь неизвестно сколько в них зашито разных кодов. По идее должно быть много, но на практике случается разная фигня, например у меня конфликтуют две разные беспроводные мыши.

3) Ненадежная конструкция кнопок. Дешевый пластик и обычная микрокнопка не подходят для использования людьми, вошедшими в азарт)
4) Отсутствие подсветки кнопки
5) Задержка срабатывания кнопки по причине энергосбережения. Предполагаю, что звонок-приемник слушает эфир не постоянно, а с какой либо периодичностью, например 1 раз в секунду, а кнопка-передатчик формирует сигнал длительностью более 1 секунды, чтобы приемник гарантированно услышал сигнал. В таком случае, ни о какой точности срабатывания говорить не приходится.
6) Финансовые затраты. Ну не прям чтоб очень большие... около 350р. х 3 = около 1000р. Не особо дорого, однако польза от такой покупки окажется нулевой по вышеперечисленным причинам.
Финансовые причины также не позволили заняться созданием беспроводных кнопок, ведь каждую кнопку придется оборудовать аккумулятором, микроконтроллером, платой зарядки, модулем беспроводной связи (например NRF24L01).

Да и вместить все это в корпус не получится. Это я еще молчу про написание прошивки для стабильной работы беспроводной связи - заняло бы кучу времени, а результат мог оказаться плачевный из за задержек сигнала, помех, и прочих подводных камней.
А времени на это НЕТ. Поэтому делаем дешево и сердито - проводом.
Самый дешевый и доступный вариант- витая пара.
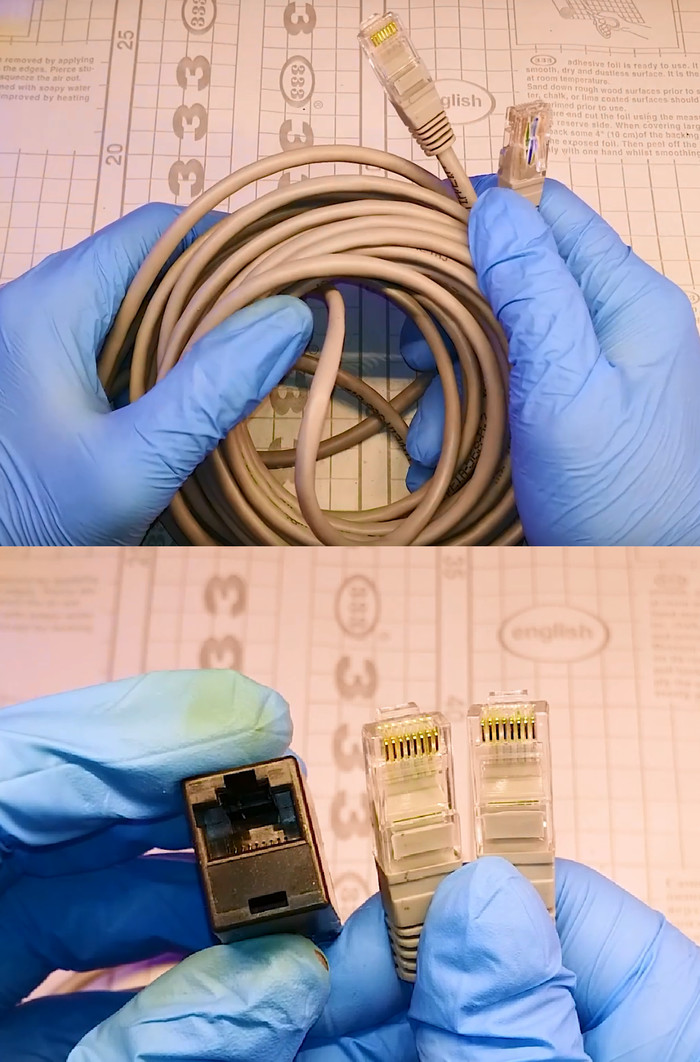
Я немного переплатил, так как купил сразу обжатый патчкорд - планировал оставить коннекторы и присрать разъемы в корпус кнопки. Но не получилось, разъем не влезал в отверстие корпуса), а городить колхоз не хотелось.
Решил сделать кнопки с проводом неразъемным, это будет надежнее хлипкого RJ-45.
А вот уже сами кнопки будут подключаться к блоку управления с помощью очень надежных китайских 4 пиновых "авиационных" разъемов с фиксирующей гайкой.
В кабеле 8 жил, для увеличения надежности скручиваю попарно по 2 жилы, и получаю 4.
Мне же нужно всего 3 провода:
1 земля
2 кнопка
3 подсветка
4 провод будет запасной, ну или просто продублирую по нему землю.

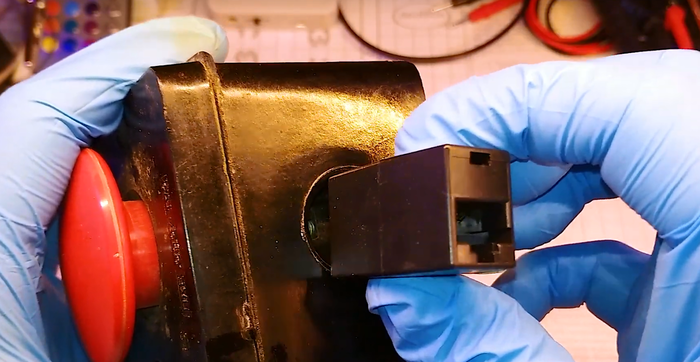
Так как отверстие в корпусе кнопки было очень мало для RJ-45, но очень велико для кабеля, распечатываю переходную гайку пластиком Pet-g и сразу, пока не остыл пластик наворачиваю на нее корпус. Резьба деформируется и принимает нужную форму, после чего ее намного проще закрутить.
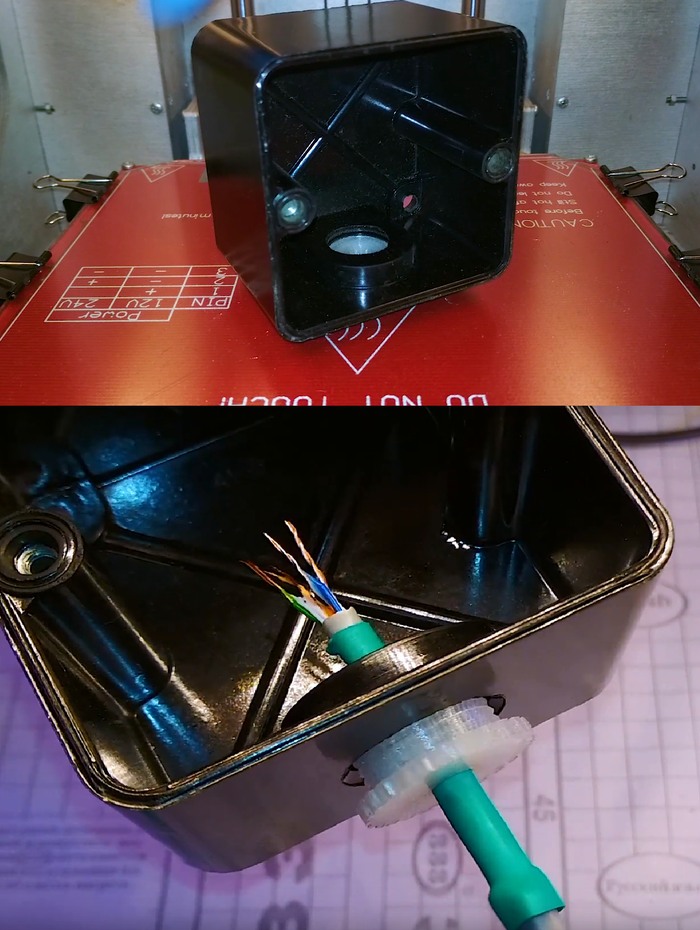
Пропускаю кабель через гайку и термоусадку.
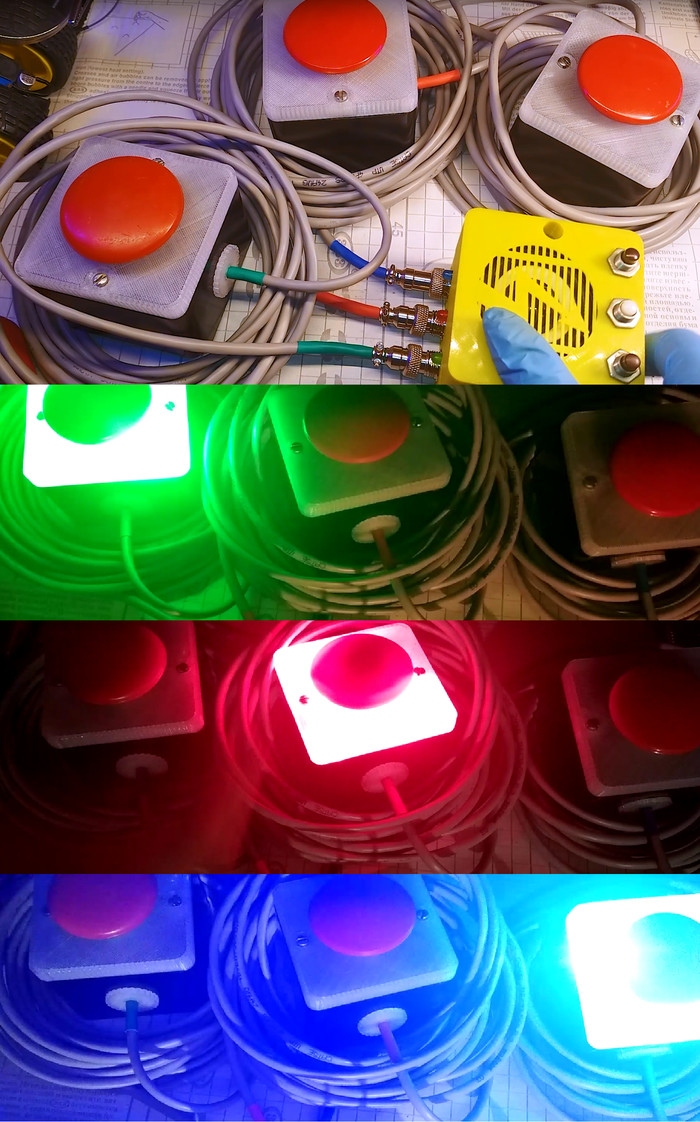
Термоусадкой буду помечать цвет подсветки кнопок для трех разных команд: красный, синий, зеленый.
Ах да, подсветка....
Корпус полностью непрозрачен, а сверлить в нем отверстия не поднялась рука.
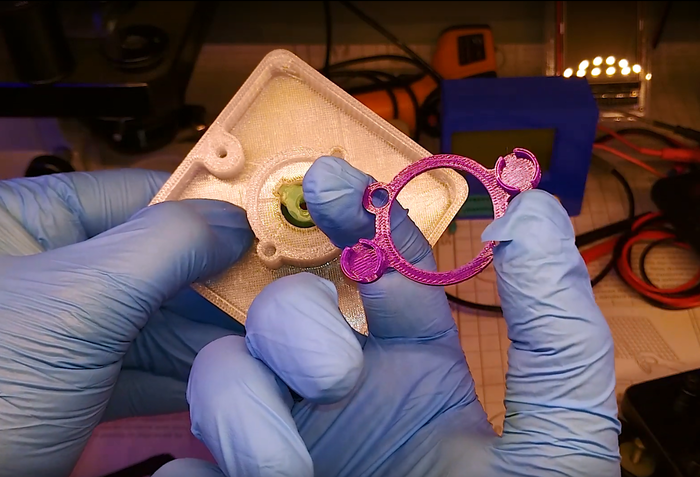
Решил смоделировать и напечатать верхнюю крышку прозрачным пластиком.
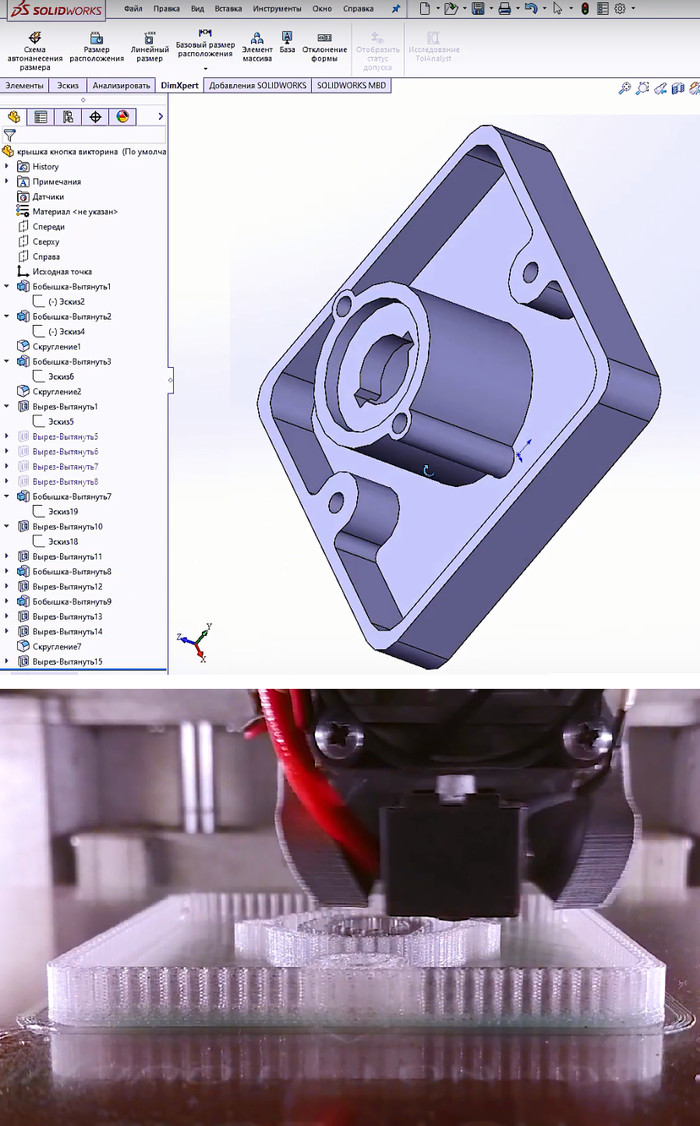
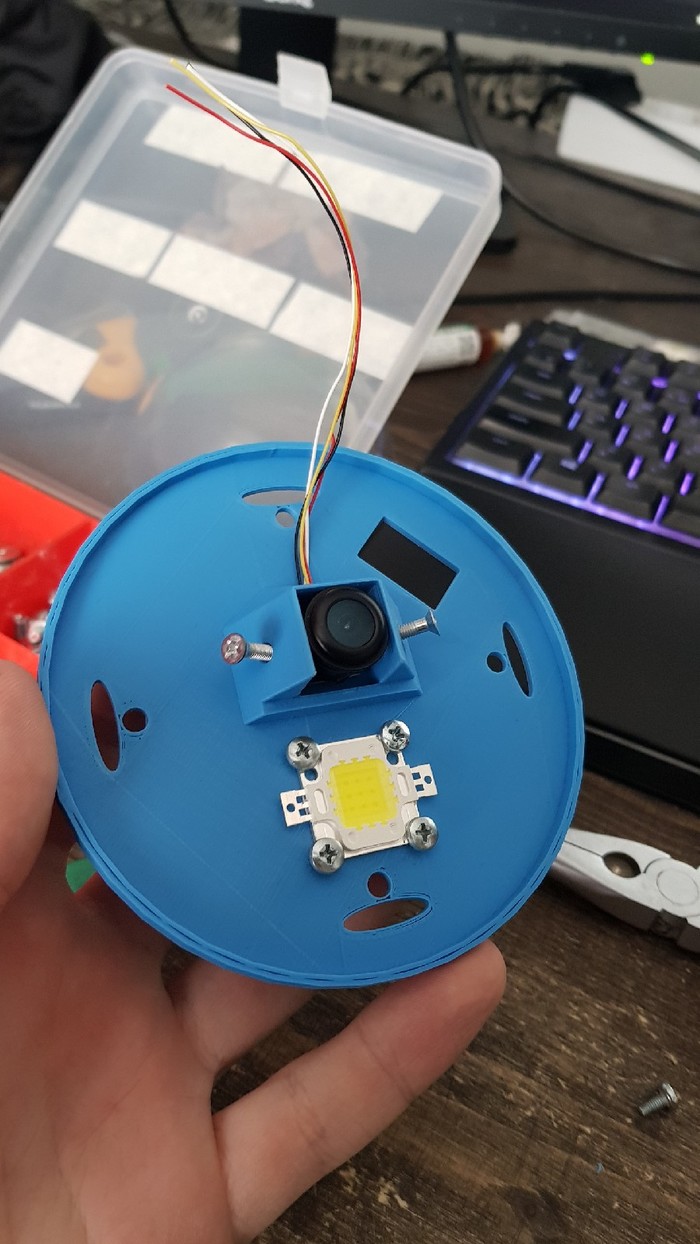
Также нужно как-то закрепить два 3х ватных светодиода внутри корпуса, для этого распечатал небольшое но надежное крепление. Светодиоды пришлось расположить по диагонали, иначе они не влезали в корпус.
Пластик Pet-g легко переносит нагрев до 100 градусов, к тому же, учитывая щадящий режим работы светодиодов, проблем возникнуть не должно.
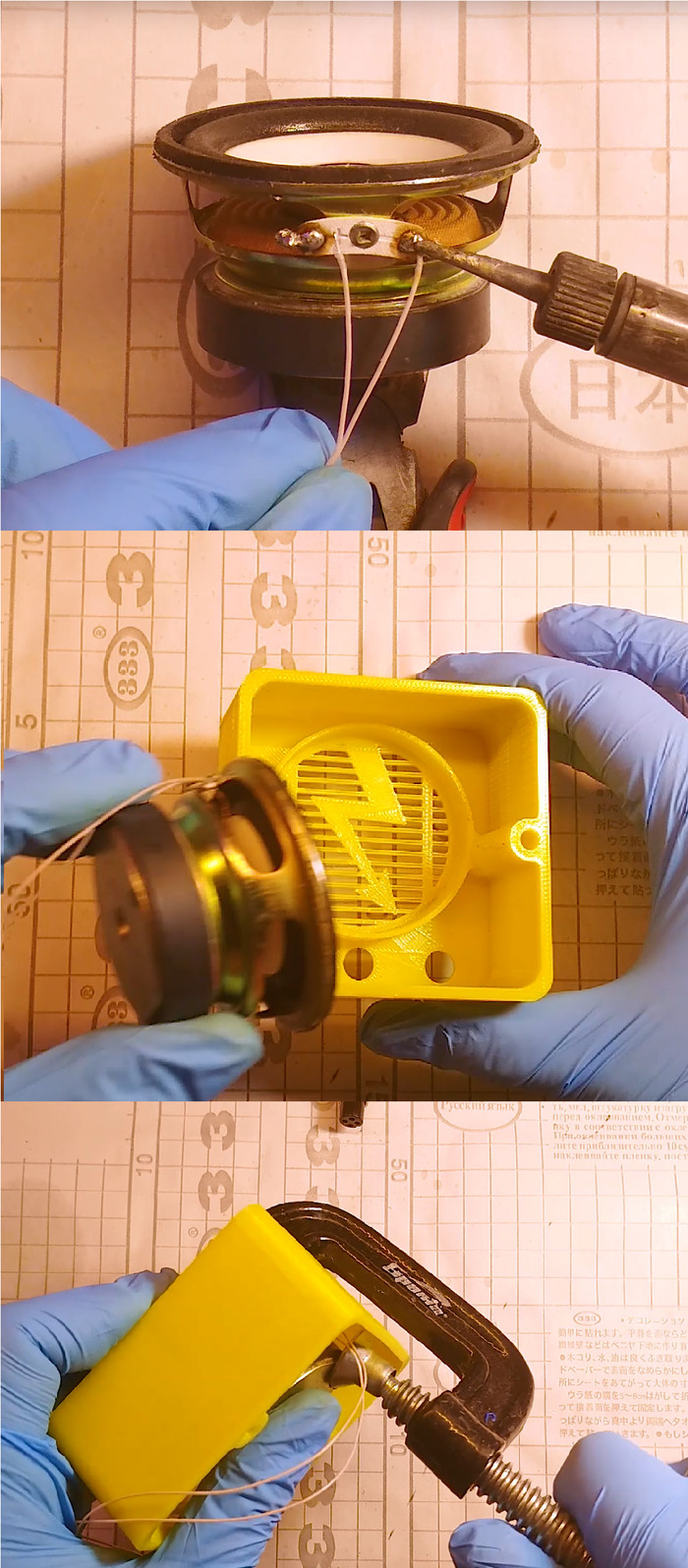
Собираю механизм контактов
Вставляю светодиоды и припаиваю их многожильным проводом МГТФ. Это мой любимый провод, очень гибкий и стойкий к износу.
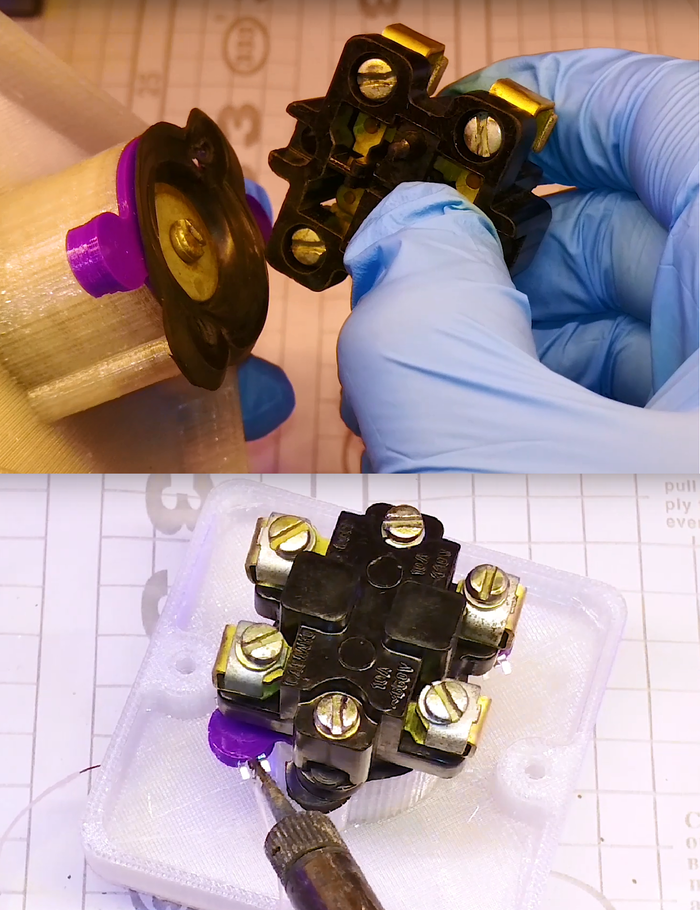
Собираю корпус, вкручиваю гайку.
Для лучшего переотражения света, обклеил корпус фольгированным скотчем. Возможно это добавит немного процентов яркости. Ну а не добавит - и хрен с ним)
Остается только прикрутить крышку к корпусу, и повторить все для оставшихся двух кнопок.
В итоге получаем это

Но это только пол дела. У нас нет самого главного - БЛОКА УПРАВЛЕНИЯ!
А делать мы его будем на любимой всеми профессионалами (шутка) ардуинке!
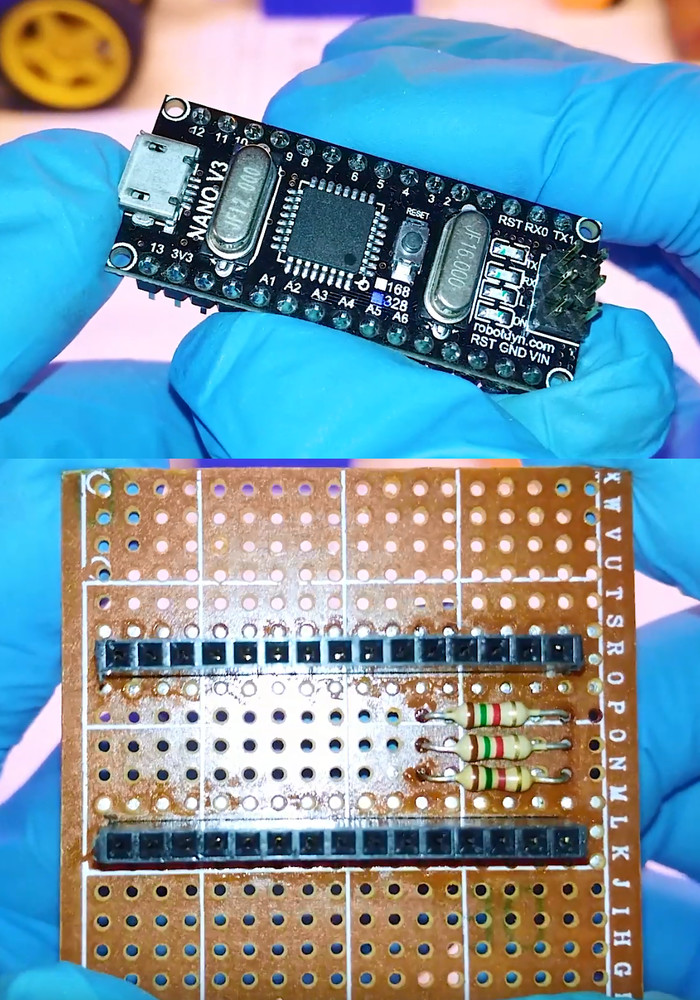
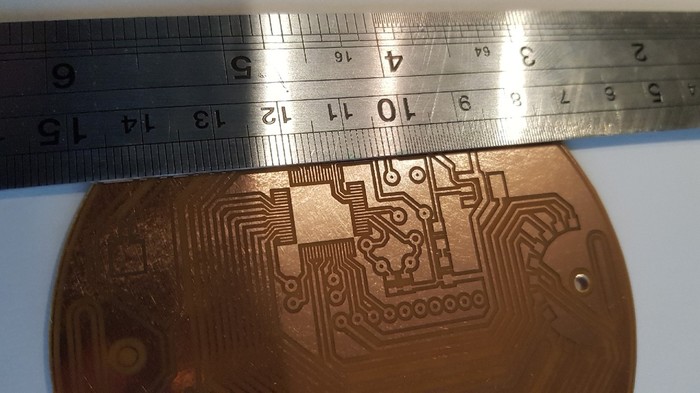
Собирать схему буду на макетной плате.
Видя тот ужас что получился в итоге, я пожалел об этом решении- надо было травить плату. Но было уже поздно, время поджимает, и назад пути нет)
Саму схему я разрабатывал в Tinkercad, Ссылка на схему и прошивку:
https://www.tinkercad.com/things/9LOnTbh6kRP
(!осторожно, говнокод!)
Выглядит это так:
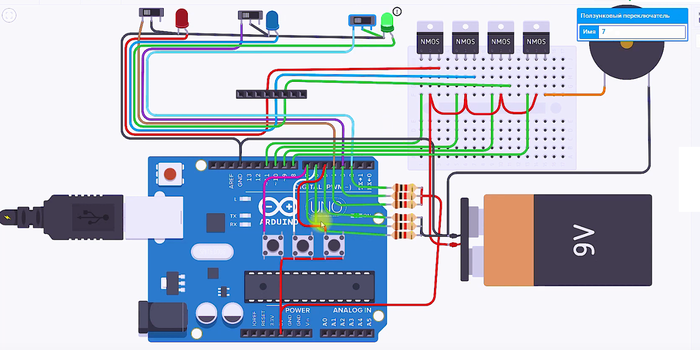
Кроме самих кнопок, в схеме есть дополнительная кнопка сброса, и две кнопки для генерации озвучки правильного и неправильного ответа.
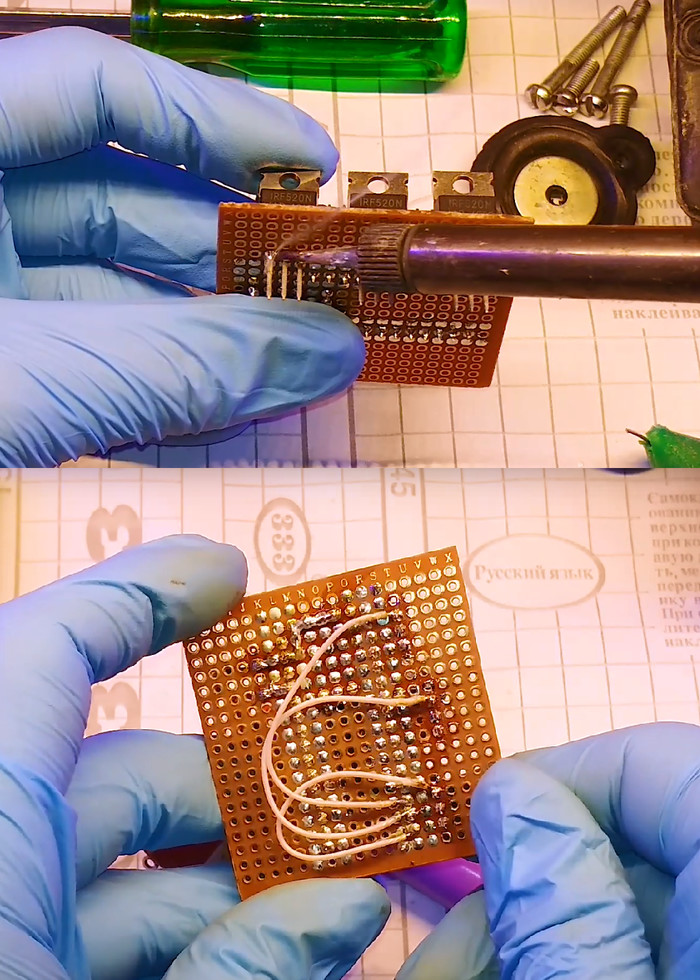
Запаиваю мосфеты IRF520N необходимые для подсветки кнопок и усиления звука, резисторы и провода. На начальном этапе выглядит еще более менее, потом будет хуже)
В качестве источника питания устройства я выбрал начинку дешевого повербанка. Реальная емкость аккумулятора около 2000 mAh. Повышающий DC/DC преобразователь имеет очень маленький ток покоя, и не отключается при низкой нагрузке - именно то, что мне нужно.
Заряжаться устройство будет с помощью отдельного 5 вольтового адаптера с круглым штекером. Он будет понадежнее чем microUSB.

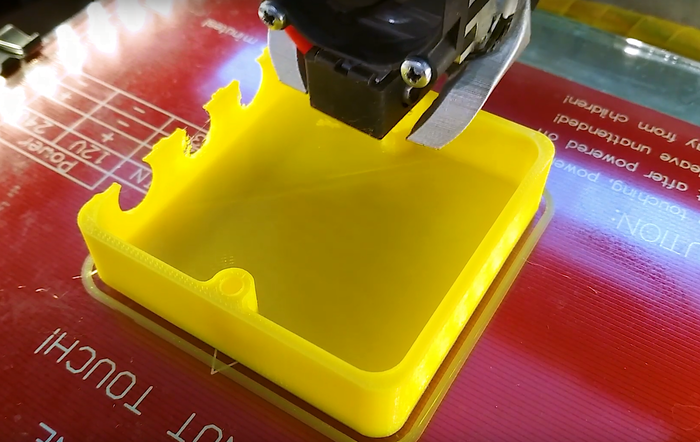
Пора уже печатать корпус блока управления, для него я выбрал пластик желтого цвета.
Для воспроизведения звуков нажатия кнопок я взял динамик от сломанной блютуз колонки, купленной на блошином рынке за 50р.
В корпус динамик вставился очень туго, пришлось запрессовывать с помощью струбцины. Однако оттуда он уже никогда не выпадет сам.
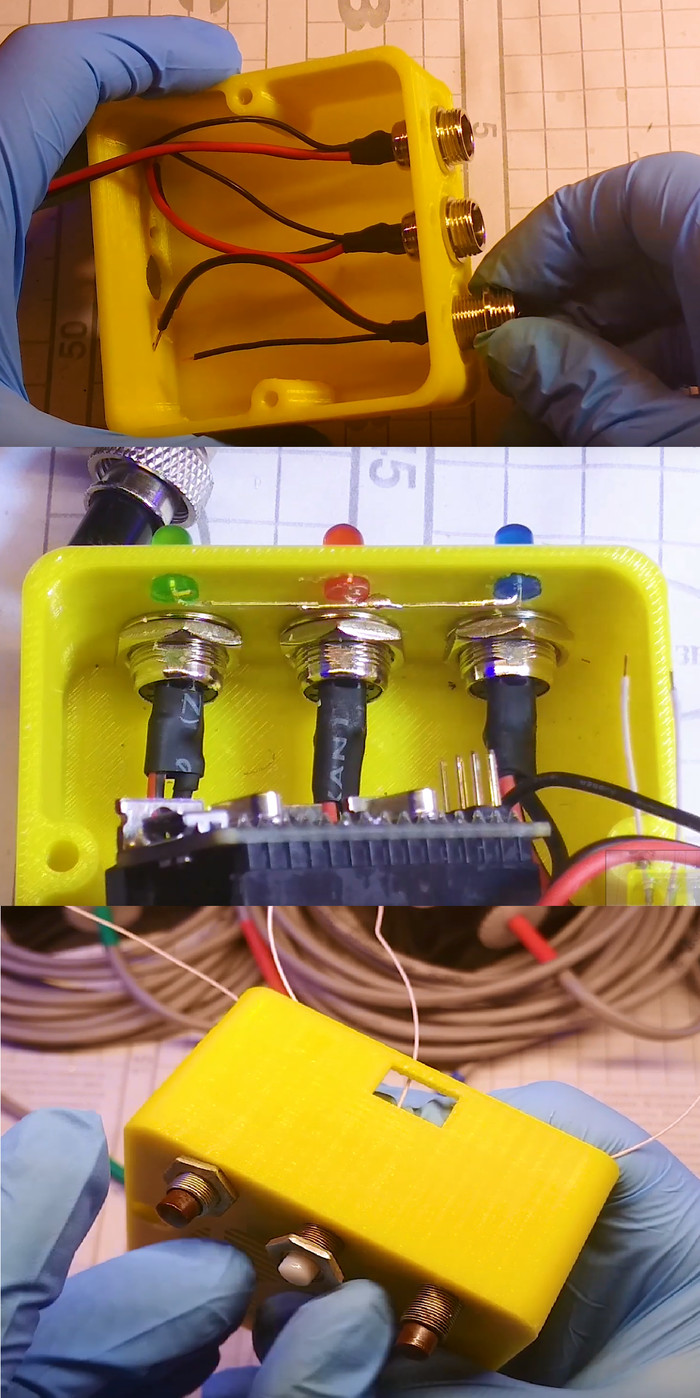
Вставляю авиационные разъемы.
Припаиваю на переднюю панель светодиоды, дублирующие подсветку кнопок.
Кнопки управления тоже советские, на базе микропереключателей.
Вот тут самый ужас. Простите за это) Выглядит ужасно, но припаяно крепко, и после сборки корпуса даже не болтается) Все это временное решение, в дальнейшем планирую переделать.
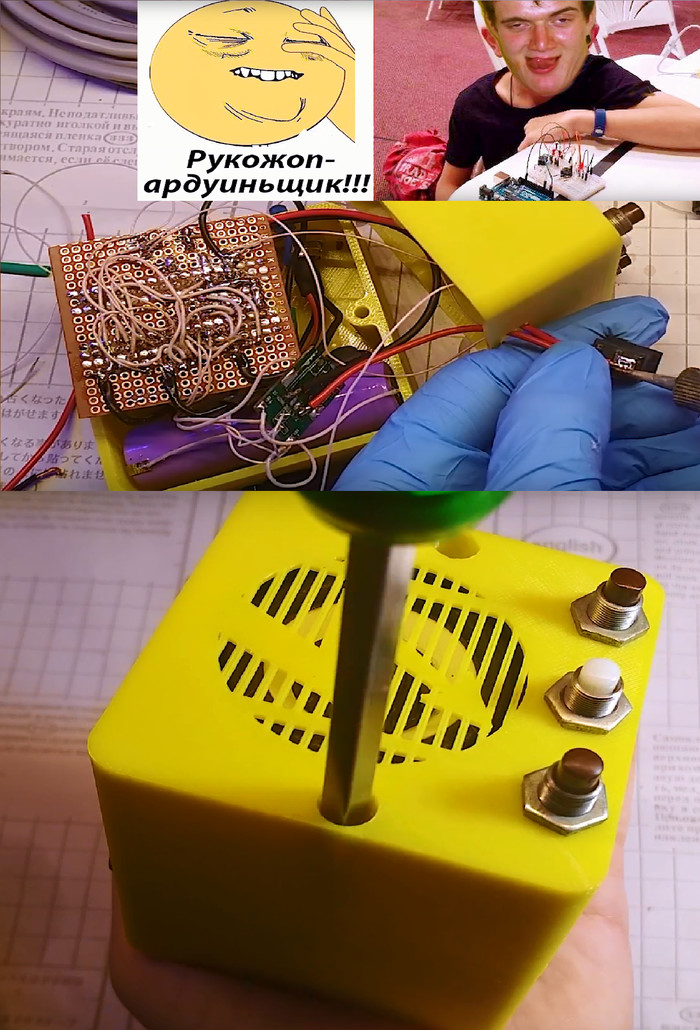
И вот финальный результат.
Кнопки работают отлично и даже пережили множество падений в процессе проведения викторины. Спасибо за просмотр!
Знаете такую таблицу оценки времени по решению задач, где ответ "нужно подумать" - это неделя, а "вообще на изи" - полгода
Собственно, хотим ниже рассказать про наш "вообще на изи" проект, который вместо 3 месяцев мы делали пол года. Тут и 3D печать более месяца чистого времени и электроника и механика и марафоны бессоных ночей, все как мы любим)
В общем: Диплом на тему: "Как мы делали Роковую Вдову с полной автоматизацией механики в винтовке и шлеме. Старкон 2019. Перечень работ и технических решений команды WOW Cosplay, которые мы оценили в 3 месяца"
Не будем лить воду и много расписывать, каким образом мы дошли до тех технических решений, которые в итоге были применены. Просто в формате списка перечислим все то, что сделали для косплея Роковой Вдовы из Overwatch.
Не все шло гладко, не все было с первого раза, но мы это сделали.
Мы набили кучу шишек — если Вам будет интересно — дайте знать в комментариях, может, мы напишем статью и об этом: сточки зрения организации процесса и выводов, к которым мы пришли. А пока…
3D моделирование
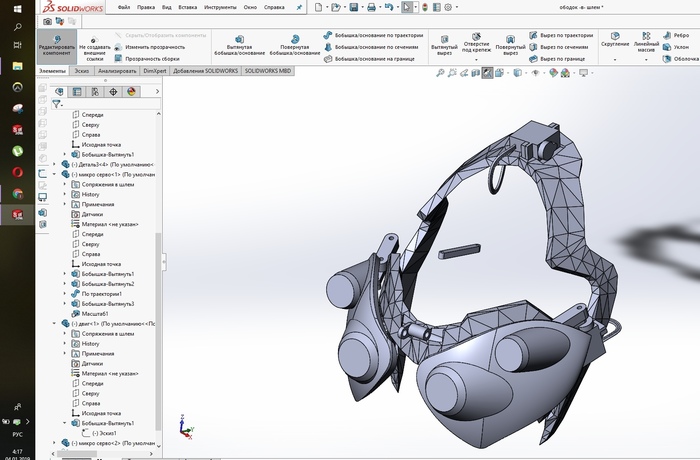
Начинали в SolidWorks и это было фиаско братан. В Fusion 360 такие вещи делать в разы приятнее
— Абсолютно все модели элементов брони были сделаны нами «с нуля», используемые программы: Solid Works и Fusion360
— Речь идет как о внешнем сходстве форм с каноном, так и об устройстве внутренних механизмов
— Мы создали 3D модели шлема, пушки и 10 элементов брони: накладки на шею, накладки на кисть руки, колени, накладки на мыс туфли и каблук, форма для браслета, форма для вставок на бедра из латекса, вставки под подсветку в колени, накладка на левое плечо, элемент брони на предплечье
— Для финальной версии шлема использовали 3D сканирование
3D печать
Совокупное чистое время печати — около 500 часов (это 20 дней, Карл), черновой печати (подгонка по фигуре, настройка механики, брак) около 1000 часов. 90% деталей напечатаны из PLA
Мы печатали на 7 разных 3D принтерах, в том числе и на двухэкструдерном Raise3D
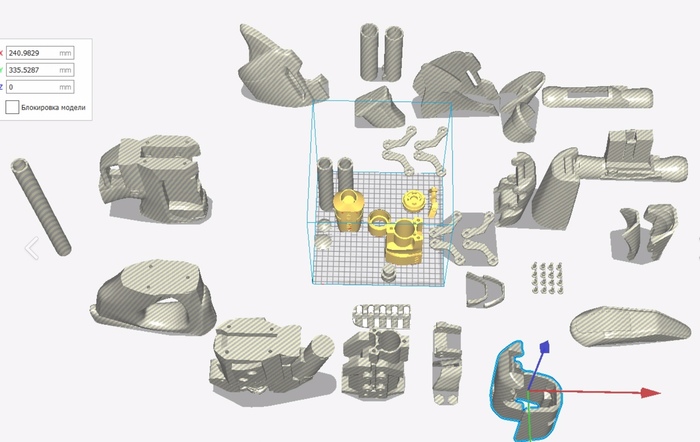
Это только маленькая часть деталей пушки. Размер рабочей области принтера на фото — 30 на 30 см
Покраска и обработка деталей
— Каждый элемент шкурился (а это PLA, представляете геморрой), обрабатывался шпаклевкой — почти неделя чистого времени ручной обработки всех деталей, так как там тьма тьмущая внутренних углов, в которые вообще не понятно, как залезть
— Накладки на шею и колени покрыты аквапринтом под карбон
— Некоторые несущие элементы пушки и шлема укреплены стекловолокном



Мягко говоря, покарску мы не планировали, иначе стоило бы печатать многие детали отдельно и по-другому, да и вообще, не из этого пластика. Подразумевалось, что пушка должна быть просто покрашена кисточками. Но желание выиграть, показать весь профессионализм, заставило нас согласиться на авантюру с профессиональной покраской.
Эх, кайфовая была покраска. Хорошо, что мы с профессиональным хромом не стали упарываться. Вообще — самый основной вывод, который мы сделали — косплей — это не автомобиль, на конкурсах, по крайней мере российских, на покраску вообще почти не смотрят. Применение многоступенчатых технологии профессиональной автомобильной покраски и професиональных эмалей вообще себя не оправдывает. Есть технологии гораздо дешевле и проще
Покрасили пушку с применением аэрографа армированной эмалью. Это дополнительно укрепило все детали пушки единой скорлупой. Так как времени было в обрез — упростили рисунок паутины (что не согласовали) и оставили шероховатую структуру краски — она дополнительно скрывала мелкие огрехи в обработке сложных поверхностей. К сожалению, заказчика не устроил варинат покраски «под реализм» и было принято решение, что остальные детали мы так красить не будем, а пушку заказчик сверху перекрасит на свое усмотрение.
Пересмаривая сейчас это видео, думаю, что стоило настоять на нашем варианте покраски. Как думаете?
ПОДСВЕТКА ВЕЗДЕ
Установлена светодиодная статичная подсветка в:
— Накладки на туфли
— Колени (на фото еще не было)
— Плечо
Программируемая подсветка:
— Броня на предплечье - одновременно импульсное и статичное свечение светодиодной ленты, в колбе водичка
— Шлем - 100% яркости подсветки в «боевом режиме» и 50% в «гражданском», запрограммирована плавная смена яркости
— Пушка - 10 зон подсветки, 2 типа подсветки: большой и маленький прицелы, дуло, верхняя и нижняя накладки - питание автономное, от батареек. Боковая подсветка, диоды в откидывающемся упоре и корпусе - питаются от общего контура вместе с моторами от спайки из 3-х Li-on аккумуляторов типа 18650.
На первой примерке был зашквар, сгорел мотор в нижней накладке, и нам пришлось устроить мастерскую у Andromeda Latex=) Кустарным методом электронику не восстановили, зато это послужило поводом для полной перебоки электронной и механической части. Кроме того, оправдала себя подстраховка в виде различных источников питания для механики и основной подсветки

Первая примерка у Andromeda Latex, тот еще стресс был :)
ОЧЕНЬ. МНОГО. ЭЛЕКТРОНИКИ. И МАЛО ВРЕМЕНИ
Накладка на руку: две кроны, ардуинка с управляющей программой, повышайка, светодиодная лента

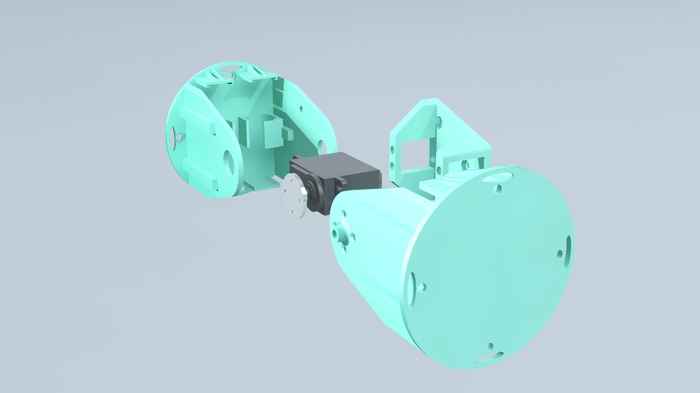
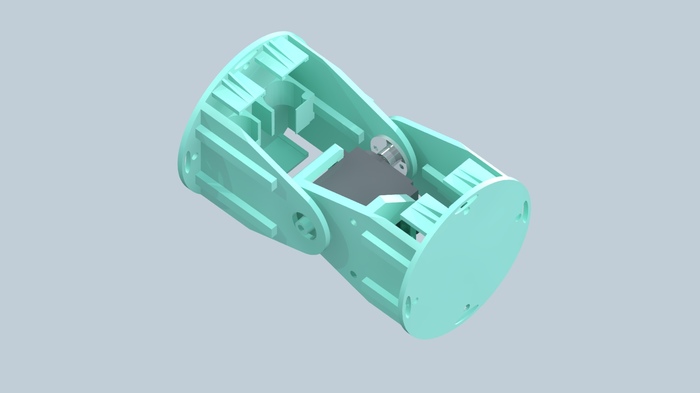
Наш вариант изготовления шлема — единственный в мире с 1 мотором на оба визора. Все, что мы находили в продаже — имеет минимум 2 мотора
Шлем:
— 2S li-Ion аккумуляторы типа 18650, управляющая программа на Arduino, 1 сервопривод с металлоредуктором, плата контроля заряда/разряда аккумуляторов BMS, трансформаторы DC-DC (понижайки, повышайки), 7 светодиодов увеличенной яркости
—Запрограммировано 2 режима работы: мгновенный переход между «боевым» и «гражданским» режимами работы по однократному нажатию кнопки и демонстрационный режим с отложенным стартом срабатывания сервопривода после нажатия кнопки. Визоры складываются, подсветка набирает яркость, срабатывает таймер обратного отсчета, светодиоды тускнеют, визоры раздвигаются
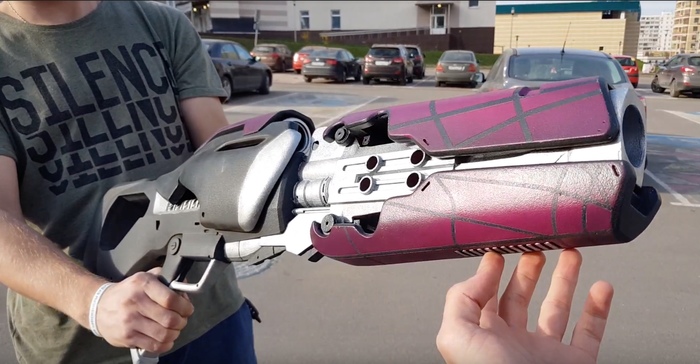
Пушка:
Состав электроники
— Собрали свою управляющую плату на базе ардуино
— 2 сервопривода с металлоредуктором в накладках
— 1 сервопривод с пластиковым редуктором в маленьком прицеле
— 1 сервопривод, переделанный в сервопривод постоянного вращения на большой прицел
— Бесколлекторный электромотор на дуло
— 3S li-ion аккумуляторы типа 18650
— Плата контроля заряда/разряда аккумуляторов
— Драйверы моторов
— Трансформаторы DC-DC разного типа
— Вся электроника построена модульно для ускорения и удешевления возможного ремонта в случае выхода какого либо модуля из строя
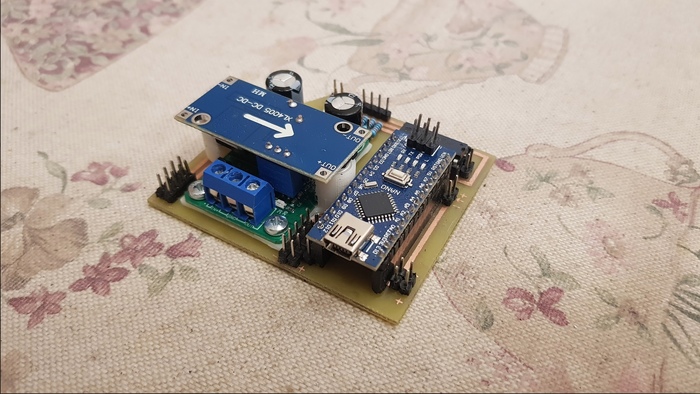
Вот эта малышка управляет всей электроникой пушки, размером она с половину твоей ладошки
Программирование
— Запрограммировано 2 режима работы «снайперский» и «штурмовой»
— Снайперский режим: выдвинуто дуло, снайперский прицел, накладки прижимаются к стволу, штурмовой прицел складывается
— Штурмовой режим: дуло укорачивается, накладки отодвигаются от ствола, снайперский прицел прячется, а штурмовой выдвигается
— При старте питания пушки - алгоритм программы проверяет положение всех механизмов и возвращает в нулевое положение, если необходимо
Механика
Шлем:
— Механизмы спроектированы в 3D, а потом распечатаны. Система рельсовых направляющих и тросового привода обеспечивает движение обоих визоров за счет 1 сервопривода с металлоредуктором максимальной тягой в 10 кг
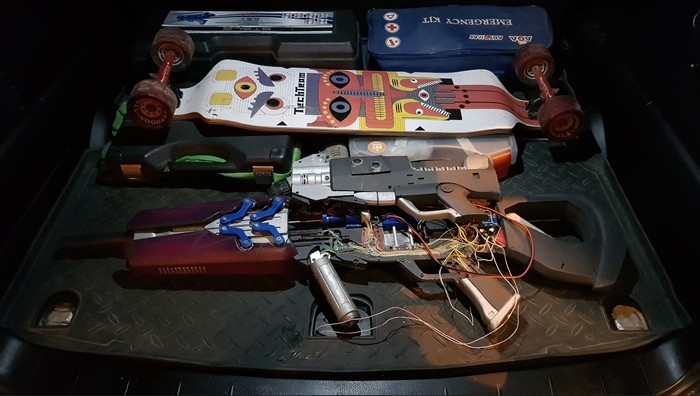
Частый гость Юриного багажника
Пушка:
— Симметрично сдвигающиеся к дулу накладки приводятся в действие двумя сервоприводами с металлоредуктором и тягой в 10 кг каждый. Панели установлены на рычаги, закрепленные на подшипниках
— За выдвижение дула отвечает бесколлекторный электромотор тягой до 3 кг. Он вращает трапецевидный каленый винт, на который через гайку закреплена полая алюминиевая трубка. В зависимости от направления, при вращении винта гайка выталкивает или втягивает трубку. За контроль движения трубки отвечает линейный подшипник
— Штурмовой прицел приводит в движение обычный пластиковый сервопривод
— Механика снайперского прицела устроена сложнее
Тест Большого Пальца. Обязательный этап контроля качества
Основание прицела представляет собой каретку, закрепленную на двух параллельных направляющих, вмонтированных в корпус пушки.
Передача движения от мотора к прицелу идет через реечную передачу.
Направляющие валы - металлические. каретка сборная - спроектирована в 3D и распечатана на 3D принтере, как и шестерня на на сервопривод, hеечная передача сделана из армированного резинового ремешка, для увеличения ресурса и уменьшения шума от трущихся элементов во время работы
Чтобы достигнуть нужной высоты хода прицела - стандартный сервопривод на 360 градусов был переделан в сервопривод постоянного вращения без ограничения по кол-ву оборотов. Крайние положения прицела контролируются концевиками
Черт возьми, после десятков бессонных ночей пушка все-таки прошла тесты в более чем 200 складывайний и расскладываний без единого клина!
Ну и напоследок, наше финальное видео со стракона, на которым мы все-таки заняли первое место в категории "Лучший студийный крафт" (отдельно стоит упомянуться Andromeda Latex и его крутой латексный сьют)
Мы закончили этот проект и безумно этому рады=)
Спасибо, что дочитали! Теперь представь, если это так долго читать, как долго это было делать?=)
Состав команды:
3D маг по Fusion 360, Solid, 3D печати и сброке и офигенным мемам— Росинов Максим
Гуру механики и электроники, золотые руки и Человек, который может не спать 4 дня — Константинов Юра
Разнорабочий — Косарев Александр
Отдельная благодарность Мише Куркову, Валерии Марашан, Виктору Шестакову, Всеволоду Петрову, Сергею Иванову, Андрею Толстых за вашу помощь и поддержку!
Подписывайтесь на наши соц. сети. Мы растем, иногда ввязываемся в "изи проекты", а потом пишем о своих приключениях)
Всем доброго времени суток. Вот и прошёл мой 3 курс в универе (МИЭМ НИУ ВШЭ). В течении года нам надо было сделать проект в качестве курсовой. Первая идея проекта состояла в том, чтобы сделать подлодку, но мы подумали, что это скучновато и было принято решение сделать подводную змею. Первым этапом стало создание презентационной гифки в Unity, чтобы защитить тему работы.
Но мне больше нравится вот так
Тему мы защитили, финансы получили, а значит пришло время проектирования и закупок. Первый концепт звена.
Сразу скажу, мы студенты на специальность коммуникационные технологии, у нас много электроники и мало механики/сопромата и делали мы всё по сути в первый раз, поэтому строго не судите.
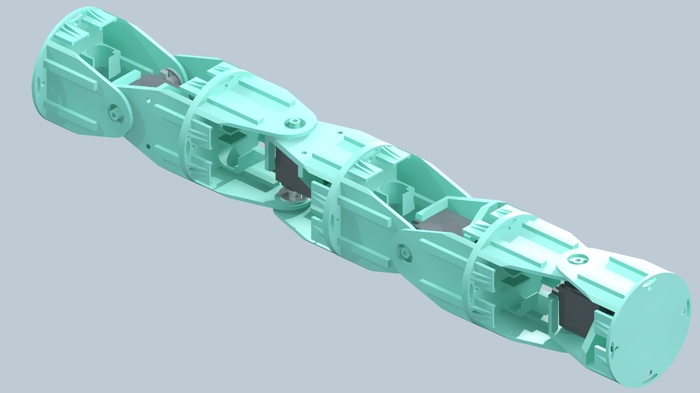
После моделирования было решено сделать опытный образец для тестов и промежуточного отчёта. Тогда с stm32 я ещё не разобрался, поэтому тестовый образец был сделан на arduino nano. Детали печатались на 3d принтере Ender-3. В итоге получилось вот такое (5 звеньев).

Сразу стало понятно, что есть проблемы в прочности деталей и в надёжности их печати. Постарались их переделать, печататься всё стало нормально, но с прочностью всё равно остались проблемы. После презентации собрали финальную версию из 8 звеньев


Одно звено печаталось 13 часов. Потом надо было сделать платы для управления и повышения напряжения. Платы делались с помощью фоторезиста.

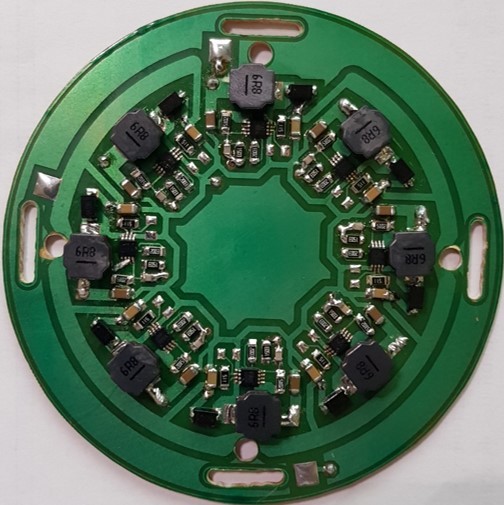
Собрали, спаяли, сделали голову

Потом сделали корпус из силикона

Когда всё собрали начались испытания
Ну и финальным аккордом было выступление на техношоу. Даже по телеку показали)
Здравствуйте.Столкнулся с проблемой на принтере Анет А6.При попытке подвигать одной из осей в любом направлении (или отправить его в автохоум)мой принтер мгновенно перезагружается.При том,что до этого работал нормально.Напряжение на блоке питания в этот момент не проседает.Все контакты в порядке, конденсаторы визуально все целые.На преобразователе 5в тоже без просадки (Замерял при помощи Ардуино).В чем может быть проблема,в какую сторону копать? Может ли быть проблема в прошивке?
P.S. Двигатель экструдера работает в штатном режиме