




Кто несет ответственность за роботов в мире людей?
Любой человек может купить робота? Следят ли робототехнические компании за тем, как используются их роботы? Могут ли вам отказать в покупке или запретить использовать уже купленного робота?
Специалисты компаний ANYbotics, Boston Dynamics и Clearpath Robotics отвечают на вопросы о безответственном и неэтичном использовании их роботов.
Иллюстрация: iStockphoto/IEEE Spectrum
За последние лет пять резко увеличилось коммерческое производство автономных роботов, которые могут работать вне структурированной среды. Но этот относительно недавний переход роботизированных технологий из разряда исследовательских проектов в коммерческий продукт сопровождается определенными сложностями, многие из которых связаны с тем, что все больше и больше роботов появляется в жизни общества.
Роботы часто будоражат умы людей, возможно, из-за их кажущейся дееспособности или типичного изображения в массовой культуре. Иногда это приводит к положительным результатам, например к инновационным способам их применения. Но есть и обратные ситуации, когда это приводит к неэтичному или безответственному использованию. Могут ли продавцы роботов что-то предпринять в таких случаях? И даже если могут, следует ли им это делать?
Робототехники считают, что роботы — это в первую очередь инструменты. Мы их конструируем, программируем, и даже автономные роботы всего лишь следуют инструкциям, которые мы в них закодировали. Однако именно кажущаяся дееспособность роботов, которая вызывает такой интерес, означает, что люди, не имеющие какого-то опыта взаимодействия с настоящими роботами, могут не понимать, что робот сам по себе не хороший и не плохой, он является лишь отражением его конструкторов и пользователей.
Это может поставить робототехнические компании в затруднительное положение. Человек, купивший у них робота, гипотетически, может использовать его как угодно. Конечно, это относится к любому инструменту, но уникальность ситуации с роботами заключается в их автономности. Можно сказать, что автономия подразумевает связь между роботом и его производителем или, в данном случае, компанией, которая его разрабатывает и продает. Пусть эта ассоциация не совсем обоснована, но она существует, несмотря на то, что в итоге именно покупатель робота полностью контролирует все его действия.
Все наши покупатели без исключения должны подтвердить, что Spot не будет применяться для нанесения вреда людям и животным а также их запугивания, использоваться в качестве оружия или оснащаться для удержания оружия.
Роберт Плэйтер, Boston Dynamics
Конечно же, робототехнические компании это понимают, потому что многие из них тщательно следят за тем, кому продают свою продукцию, и очень четко определяют желательные способы применения своих роботов. Но насколько далеко должна распространяться эта ответственность, когда робот «вылетает из гнезда» создавшей его компании? И насколько это вообще возможно? Должны ли робототехнические компании нести ответственность за действия своих роботов в мире людей, или нужно признать, что после продажи робота ответственность за него также переходит к новому владельцу? И что можно предпринять, если возникают случаи безответственного или неэтичного использования роботов, которые могут отрицательно сказаться на производителях робототехники?
Чтобы получше разобраться в этом вопросе, мы связались с сотрудниками трех робототехнических компаний, каждая из которых имеет опыт продажи уникальных мобильных роботов коммерческим потребителям. Мы задали им пять вопросов об ответственности, которую робототехнические компании несут за продаваемых роботов, и вот что они ответили.
Есть ли какие-то ограничения на то, как люди могут использовать ваших роботов? Если да, какие именно, а если нет, то почему?

Петер Фанкхаузер, генеральный директор ANYbotics:
Мы тесно работаем с клиентами, чтобы убедиться, что наш продукт обеспечивает правильное решение их проблемы. Таким образом, мы сразу понимаем, для чего приобретается робот, и не сотрудничаем с клиентами, которые хотят использовать нашего робота ANYmal не по назначению. В частности, мы категорически не допускаем любое военное или вооруженное использование наших роботов, и с момента основания ANYbotics стараемся улучшить условия труда для людей, сделать их более комфортными, приятными и безопасными.

Роберт Плэйтер, генеральный директор, Boston Dynamics:
Да, мы ввели ограничения на способы применения наших роботов, которые изложены в условиях договора купли-продажи. Все наши покупатели без исключения должны подтвердить, что Spot не будет применяться для нанесения вреда людям и животным а также их запугивания, использоваться в качестве оружия или оснащаться для удержания оружия. Как и любой другой товар, Spot необходимо использовать в рамках закона.
Райан Гариепи, технический директор, Clearpath Robotics:
У нас есть строгие ограничения и процессы для проверки клиентов, основанные преимущественно на правилах экспортного контроля Канады. Они зависят от типа проданного оборудования, а также от того, где оно будет использоваться. В общем, мы также не будем продавать или поддерживать робота, если знаем, что он создаст неконтролируемую угрозу безопасности, или если у нас будут основания полагать, что покупатель не обладает достаточной квалификацией для использования продукта. И, как правило, мы не поддерживаем использование наших продуктов для разработки полностью автономных систем вооружений.
Почему покупатель робота должен быть ограничен в его использовании?
Петер Фанкхаузер, ANYbotics:
Мы рассматриваем робота не как обычный предмет, а скорее как искусственную рабочую силу. Для нас это означает, что передача робота и его использование тесно связаны, а заказчику и поставщику необходимо договориться о том, какие задачи робот будет выполнять. Такой подход находит отклик у наших клиентов, которых все больше интересует возможность платить за роботов как за услугу или за каждое использование.
Роберт Плэйтер, Boston Dynamics:
Мы продаем товар и сделаем все, что в наших силах, чтобы не дать злоумышленникам использовать наши технологии во вред, но мы не можем контролировать каждый случай использования. Тем не менее, мы считаем, что наилучшее влияние на наш бизнес окажет использование технологий в мирных целях — для работы вместе с людьми в качестве надежных помощников и защиты их от опасностей. Мы не хотим, чтобы наши технологии использовались для причинения вреда или пропаганды насилия. Мы используем такие же ограничения, как и другие производители или технологические компании, которые принимают меры по сокращению или исключению насильственного или незаконного применения их продуктов.
Райан Гариепи, Clearpath Robotics:
Допустим, что организация, устанавливающая ограничения, является частной, а робот и его программное обеспечение продаются, а не сдаются в аренду или под управление, в таком случае нет веских юридических причин для ограничения использования. При этом производитель также не обязан обеспечивать поддержку этого конкретного робота или клиента в будущем. Однако, учитывая, что мы пока находимся только на пороге общественных перемен, которые принесут роботы, в интересах производителя и пользователя честно сообщать друг другу о своих целях. Сейчас вы вкладываетесь не только в первоначальную покупку и отношения с производителем, вы инвестируете в обещание того, как вы можете помочь друг другу преуспеть в будущем.
Если робот используется безответственно с точки зрения безопасности: вмешивайтесь! Если сталкиваетесь с неэтичным применением, не молчите!
Петер Фанкхаузер, ANYbotics
Что реально вы можете сделать, чтобы гарантировать использование приобретенных роботов по назначению?
Петер Фанкхаузер, ANYbotics:
Мы поддерживаем тесное сотрудничество с клиентами, чтобы наше решение позволило им осуществить все поставленные задачи. Поэтому мы отказались от технических возможностей блокировки использования продуктов не по назначению.
Роберт Плэйтер, Boston Dynamics:
Мы тщательно проверяем своих клиентов и следим, чтобы предполагаемое использование соответствовало функционалу робота Spot и не противоречило условиям договора купли-продажи. Мы отказываем в продаже клиентам, которые планируют использовать роботов для задач, которые им не совсем подходят. А в случае злоупотребления нашими технологиями или нарушения правил использования, согласно условиям договора купли-продажи, аннулируется гарантия и возможность получать обновления, обслуживание, ремонт или замену робота. Мы также можем изымать роботов, которые были арендованы, а не куплены. И наконец, мы не будем повторно продавать роботов клиентам, нарушающим условия договора купли-продажи.
Райан Гариепи, Clearpath Robotics:
Обычно мы работаем с клиентами перед продажей, чтобы убедиться, что их ожидания соответствуют реальности, в частности, по таким вопросам, как безопасность, требования по контролю и удобство использования. Уж лучше и вовсе не заключить сделку, чем продать робота, который будет пылиться на полке или, и того хуже, причинять вред, поэтому мы предпочитаем снизить риск возникновения такой ситуации до получения заказа или отправки робота покупателю.
Как вы оцениваете пограничные случаи применения, например, если кто-то захочет использовать вашего робота в области искусства или исследованиях, которые могут расширить границы того, что вы лично считаете ответственным или этичным?
Петер Фанкхаузер, ANYbotics:
Главное — вести диалог, стараться понять друг друга и искать альтернативы, которые устроят все заинтересованные стороны, и чем раньше начать этот диалог, тем лучше.
Роберт Плэйтер, Boston Dynamics:
Существует четкая грань между изучением роботов в науке и искусстве и использованием роботов в насильственных или незаконных целях.
Райан Гариепи, Clearpath Robotics:
Мы продали уже тысячи роботов сотням клиентов, и я не припомню, когда в последний раз нам не нужно было разбираться с экспортным контролем и проводить общую оценку целей и ожиданий клиента. Я уверен, что это изменится, так как цены на роботов продолжают снижаться, а их эксплуатационная гибкость и удобство в использовании растут.
Сейчас вы вкладываетесь не только в первоначальную покупку и отношения с производителем, вы инвестируете в обещание того, как вы можете помочь друг другу преуспеть в будущем.
Райан Гариепи, Clearpath Robotics
Что должны делать робототехники, если видят, как робота используют неэтичным или безответственным образом?
Петер Фанкхаузер, ANYbotics:
Если робот используется безответственно с точки зрения безопасности, вмешивайтесь! Если сталкиваетесь с неэтичным применением, не молчите!
Роберт Плэйтер, Boston Dynamics:
Мы хотим, чтобы роботы приносили человечеству пользу, а значит, в том числе, не наносили людям вреда. Мы думаем, что отрасль роботостроения станет коммерчески жизнеспособной в долгосрочной перспективе, только если люди будут рассматривать роботов как полезные инструменты, не беспокоясь о том, могут ли они причинить вред.
Райан Гариепи, Clearpath Robotics:
Если это единичный случай, им следует обсудить проблему с пользователем, поставщиком или поставщиками, средствами массовой информации и регулирующими или государственными органами, если возникает непосредственная угроза безопасности. Если указанная ситуация рискует неоднократно повториться и не воспринимается всерьез, робототехникам следует вынести это на более широкое обсуждение на соответствующих площадках: на конференциях, в отраслевых группах, в органах по стандартизации и т. п.
Заключение
Поскольку на рынке появляется все больше и больше роботов с различными возможностями, эти проблемы могут возникать все чаще. Три компании, с которыми мы поговорили, конечно же представляют не все имеющиеся точки зрения. Но я полагаю (надеюсь?), каждый, имеющий отношение к производству роботов согласится с тем, что роботы должны использоваться для улучшения жизни людей. Но что означает «лучше» в контексте искусства, исследований и даже использования роботов в вооруженных силах, не всегда легко определить, и неизбежно возникнут разногласия относительно того, что является этичным и ответственным, а что нет.
Автор оригинала: Evan Ackerman
Показать полностью
4


Amazon представила домашнего робота собственного производства

Американская компания Amazon разработала робота для дома, ему присвоено название Astro. Об этом во вторник говорится в заявлении вице-президента Amazon по управлению продуктами Чарли Тричлера, опубликованном на сайте компании.
Робота можно использовать для видеонаблюдения и контроля за безопасностью, он сможет самостоятельно передвигаться по дому, проверять комнаты и оповещать о появлении незнакомцев.
Американская компания Amazon разработала робота для дома, ему присвоено название Astro. Об этом во вторник говорится в заявлении вице-президента Amazon по управлению продуктами Чарли Тричлера, опубликованном на сайте компании.
Робота можно использовать для видеонаблюдения и контроля за безопасностью, он сможет самостоятельно передвигаться по дому, проверять комнаты и оповещать о появлении незнакомцев.
Стартовая цена домашнего робота составит около $1 тыс., впоследствии компания намерена увеличить ее до $1,5 тыс. Устройство будет произведено в ограниченном количестве, продажи начнутся в 2021 году.
Показать полностью
Как бегает и прыгает робот Boston Dynamics Atlas
Свободный перевод интервью с Пэтом Мэрионом, ведущим разработчиком программного обеспечения для сенсорных систем Атласа.
Разработчики Атласа используют паркур для быстрого создания поведения, динамического движения, и связи между восприятием и системами управления, что позволяет роботу в буквальном смысле адаптироваться на лету.
Алгоритмы восприятия робота преобразуют данные сесноров в формат, пригодный для принятия решений и планирования физических действий. Атлас использует инерционные сенсоры, сенсоры положения моторов, сенсоры силы для управления движением и удержания равновесия тела.
Атлас использует time-of-flight камеру с сенсором расстояния для создания облака точек с частотой 15 кадров в секунду. Облако точек (point cloud) - это большая коллекция измеренных растояний. С помощью алгоритма многоплоскостной сегментации Атлас извлекат из облака точек отдельные поверхности, из которых в свою очередь строятся модели окружающих объектов.
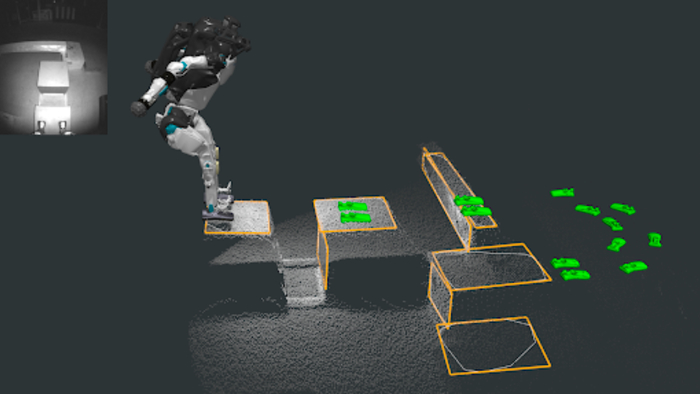
Слева вверху на рисунке показано, что видит инфракрасная камера робота. Оранжевыми прямоугольниками обозначены поверхности, которые Атлас смог распознать. Эти поверхности используются для планирования будущих действий, и зеленым цветом показано, куда робот планирует ставить ступни ног.
Робот получает высокоуровневую карту, показывающую, куда он должен двигаться и какие трюки он должен исполнить по пути. Эта карта является приблизительной, она не соответствует в точности построенной дорожке с препятствиями. Атлас использует эту карту для бега, при этом заполняя пробелы данными сенсоров. например, Атлас знает, что должен запрыгнуть на коробку. Если подвинуть коробку на полметра в сторону, Атлас все равно найдет и запрыгнет на нее. Если отодвинуть коробку слишком далеко, система не сможет ее найти и робот остановится.
Каждое движение, которое производит Атлас, получено из библиотеки шаблонов, подготовленных заранее с помощью оптимизации траекторий. Благодаря этому мы можем обучать робота новым движениям, добавляя новые траектории в библиотеку. Получая от системы восприятия запланированную цель для движения, робот выбирает из библиотеки шаблон, наиболее близкий к требуемому движению.
Разработка элементов поведения позволяет инженерам Boston Dynamics испытать пределы возможностей робота в симуляции, а также уменьшает количество вычислений, которые должен выполнять робот во время движения.
Для непосредственного выполнения движений робот использует так называемое управление с прогнозирующими моделями (model predictive control, MPC), т.е. модель динамики робота используется для предсказания того, как движения робота будут развиваться со временем. Контроллер постоянно решает задачу оптимизации для нахождения оптимального движения.
Шаблоны, сохраненные в библиотеке, являются примерами "хороших" решений. Контроллер адаптирует силы, положения частей тела, время исполнения движений, чтобы учесть факторы окружения: разницу в геометрии, проскальзывания конечностей и другие факторы, возникающие во время движения. Прыжок с платформы высотой 52 см принципиально не отличается от прыжка с платформы высотой 40 см, и MPC контроллер робота успешно решает подобные задачи.
Поскольку контроллер прогнозирует будущее, он может создавать плавные переходы от одного движения к другому. Это также облегчает создание библиотеки движений, поскольку инженерам не приходится рассматривать комбинации различных движений, которые могут следовать друг за другом. Разумеется, MPC контроллер не всесилен, и нам приходится искать компромис между сложностью контроллера и размером библиотеки шаблонов траекторий.
Работа над паркуром позволила получить глубокое понимание того, как можно создавать и управлять широким спектром динамических движений Атласа. Что еще более важно, это позволило создать расширяемую программную систему, которая будет расти и развиваться, давая Атласу новые возможности для восприятия и взаимодействия с его окружением.
Показать полностью
1
4

Биоморфы как оружие будущего
Биоморфизм — отличный способ оставаться неприметным, даже находясь на виду. 20 сентября, портал wenweipo.com сообщил о том, что инженеры Северо-западного политехнического университета КНР (город Сиань) разработали и успешно испытали роботизированную копию морского ската, который потенциально может стать оружием будущего.
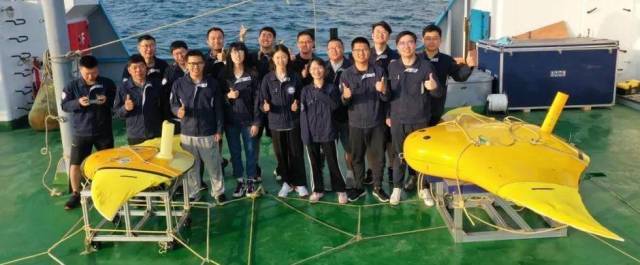
По словам разработчиков, последняя версия механического ската имеет размах «крыла» около 3 м и массу 470 кг. В ходе испытаний подводный аппарат, на 90% имитирующий внешность ската и его движения под водой, совершил погружение на глубину 1025 м, собрал исследовательские данные и успешно поднялся на поверхность моря.
Испытания механического ската
Авторы механического ската указывают, что он может совершать глубоководные погружения для исследования морей и океанов. При этом возможность нести различную полезную нагрузку и автономность позволяют использовать его и в других целях — например, военных.
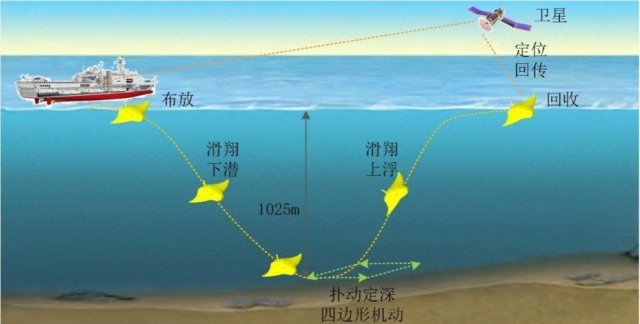
Схема испытаний механического ската. Источник изображения: wenweipo.com
Ранее(2018г.) схожую разработку представили в Турции. Компания Albayraklar Group анонсировала выпуск принципиально нового типа подводных дронов под названием WATTOZZ (от тур. vatoz — морской скат). По словам разработчиков, роботизированный подводный дрон внешне почти неотличим от настоящего ската. Благодаря используемым материалам его невозможно обнаружить с помощью сонаров и других систем отслеживания подводных целей. При этом группа рыбо-роботов, прикрепившись ко дну корабля с помощью магнитов, может легко потопить его при активации встроенной боевой части.
Ещё одно назначение механических скатов — наблюдение и разведка. Для этого WATTOZZ оснащён двумя камерами, а также системами самозащиты от морских обитателей. Аппараты управляются с помощью гидроакустических сигналов, аналогичных тем, которые издают подводные млекопитающие. Встроенного аккумулятора хватает на 12 часов работы, в движение дрон приводится с помощью трёх специальных двигателей. При необходимости WATTOZZ может впадать в «спячку», а затем атаковать вражеские корабли и субмарины, получив соответствующий сигнал.
В Albayraklar Group указывают, что WATTOZZ разработан совместно с Черноморским техническим университетом (Karadeniz Technical University).
Мульт:
Показать полностью
1
2



Гусеничное шасси-робот на базе Arduino
Проект был подготовлен студией droidbot.store
Шасси для робота, неотъемлемая часть конструкции любого робота, основная функция которого - перемещение. Китай предлагает не мало готовых вариантов, но большинство из них либо слишком дороги, либо не функциональны, слишком мало места под электронику. Единственный универсальный вариант - шасси для машинки, но монтажные отверстия на мой взгляд не слишком удобные.
Моя хотелка сказала, хочу гусеничное шасси с возможностью прикручиванием сверху чего угодно, например "руки-манипулятора". То есть цель - получить универсальное шасси под любой роботизированный проект. На алике нашел более-менее подходящие гусеницы, которые через напечатанный переходник отлично встают на популярные ТТ двигатели.
В комплекте к ним идут уже напечатанные втулки, но скажу сразу они не того размера, они просто не налезают на вал двигателя, такие уж китайцы)

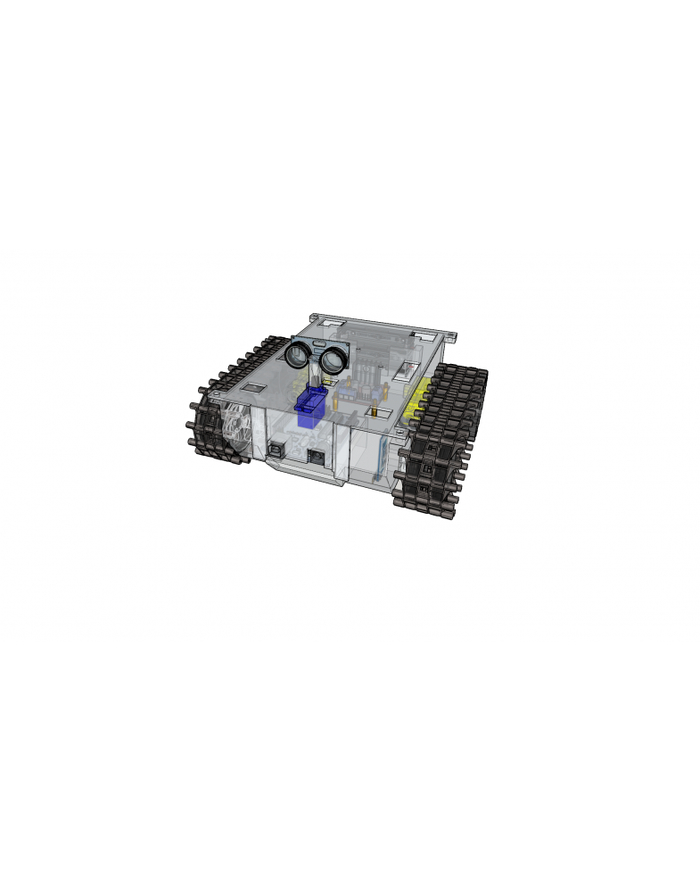
Корпус проектировал в SketchUp, получился немного угловатый, но мне все равно нравится, ибо все идеально выверенно, до 10-ых миллиметра (спасибо штангенциркулю) и напечаталось все очень круто. Пластик использовал PLA.
Как итог, готовая модель у меня выглядит вот так:
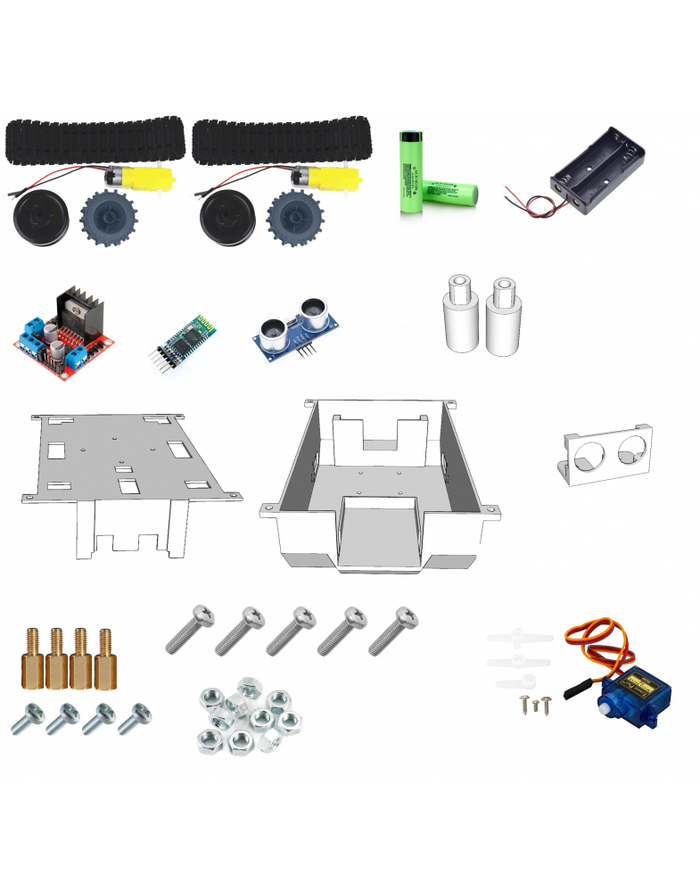
А это все комплектующие для сборки:
Видео сборки:
На видео не показано подключение серво и HC-SR04, так как в моем скетче они не используются, но место на крышке я под них все равно предусмотрел.
Инструкция по сборке:
http://wiki.droidbot.store/lib/exe/fetch.php?media=буклет.pdf
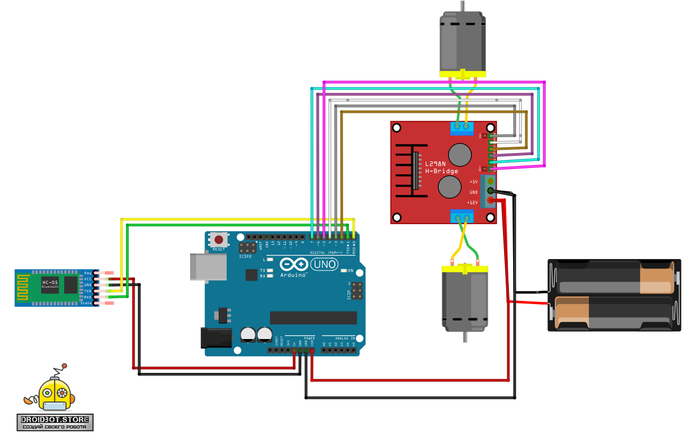
Проект "Bluetooth машинка 2WD на Arduino UNO"
А это один из возможных проектов на данном шасси. Ничего особенного в нем нет, но можно на скорую руку проверить шасси в действии.
Требуемые компоненты для проекта
Нам необходимо:
Arduino UNO
HC-05
Драйвер двигателей L298N
Две батарейки 18650
Провода
Схема подключения
Скетч для Arduino
Во время записи скетча не забудьте отключить HC-05, а то выдаст ошибку!
https://wiki.droidbot.store/doku.php?id=машинка_на_arduino
Программа для управление с андроида:
https://arduino-lab.ru/sketches/Remote_control.apk (программа не моя)
На правах рекламы
И кого заинтересовал, вот сам набор, доступен под заказ в моем магазине:
https://droidbot.store/Наборы ARDUINO-KIT/nabor-gusenichnogo-shassi-robota-na-baze-arduino
Если будут заинтересованные статьей, то в общий доступ на thingiverse добавлю модель.
Показать полностью
5
1

Готовы к Евро-2024? А ну-ка, проверим!
Для всех поклонников футбола Hisense подготовил крутой конкурс в соцсетях. Попытайте удачу, чтобы получить классный мерч и технику от глобального партнера чемпионата.
А если не любите полагаться на случай и сразу отправляетесь за техникой Hisense, не прячьте далеко чек. Загрузите на сайт и получите подписку на Wink на 3 месяца в подарок.

Реклама ООО «Горенье БТ», ИНН: 7704722037


Роботы-жокеи
Роботы-жокеи — небольшие роботы, применяемые в арабских странах для участия гонок на верблюдах вместо людей. До разработки роботов-жокеев в 2004 году в таких странах, как Саудовская Аравия, Бахрейн, ОАЭ и Катар, в качестве наездников использовались маленькие дети, причём зачастую делалось это с нарушением их прав и было сопряжено с высоким травматизмом. Под давлением правозащитных организаций власти Катара и ОАЭ запретили использовать живых людей в качестве наездников во время гонок на верблюдах, и их место в седле заняли роботы.
Гонки на верблюдах пользуются большой популярностью в арабских странах и по-другому называются «Спортом Шейхов». Из-за ряда особенностей такого рода гонок предпочтение всегда отдавалось низкорослым наездникам с лёгким весом, и так как для этого больше всего подходили маленькие дети, использовали именно их. Нередки были случаи, когда детей похищали из их семей специально для того, чтобы они участвовали в гонках на верблюдах, невзирая на тот факт, что это было опасно даже для взрослого человека.
Объединённые Арабские Эмираты стали первой страной, где официально было запрещено допускать до гонок детей младше 15 лет. Нарушение данного запрета, объявленное шейхом ОАЭ Хамданом бен Заедом аль Нахьяном, каралось тюремным сроком или исключением из гонок.
Примеру ОАЭ последовал шейх Катара Хамад бен Халифа Аль-Тани, который запретил использовать детей в качестве жокеев в 2005 году и постановил, чтобы вместо людей в гонках на верблюдах участвовали роботы.
К разработке роботов в Катаре приступили в начале 2001 года, а уже в 2003 году удалось создать первую удачную модель. В конце 2003 года работа над созданием робота была доверена швейцарской фирме firm K-Team. Первая проблема, с которой столкнулась команда разработчиков во главе с Александром Колотом, заключалась в том, что верблюды привыкли к людям-наездником, и первые модели роботов, которые не были похожими на людей, пугали верблюдов и сбивали их с толку. Поэтому пришлось изменить дизайн роботов так, чтобы они очертаниями были похожи на людей. У новых моделей были манекеноподобные «лица», тёмные очки и головные уборы и даже одежда. Помимо прочего использовался также парфюм, которым пользовались наездники. Следующая проблема, которую предстояло решить, представляла собой условия, в которых будут использоваться роботы и компьютеры, которые ими управляли: высокие температуры, песок, тряска при езде. Тем не менее, решить их удалось довольно быстро, и уже в 2005 году в Катаре были проведены первые успешные гонки на верблюдах, в которых в качестве наездников участвовали только роботы.
Главным недостатком швейцарской модели были большой вес (16-18 кг) и высокая стоимость. В конечном итоге их заменили другие модели, которые были легче (2-3 кг) и дешевле.
Можно приручить лошадей заново на новом уровне если добавить к ним компьютер.
Лошадь прекрасно ориентируется в пространстве, тогда как для компьютера требуются огромные вычислительные ресурсы на это. В то же время лошадь не способна выполнять системную работу без участия человека.
В общем, лошади под управлением робота смогут автономно выполнять множество работ в сельской местности. Все навесное оборудование будет подключатся также автоматически.
Лошадь это "шасси" и мощная система ориентации в пространстве, все остальное сделает робот.
+ Доставка почты и товаров
+ Мониторинг
Лошадь может проскакать тысячи километров за месяц, питаясь подножным кормом.
+ Автономная вспашка
В одном из вариантов сказок про мальчика-с-пальчика, он управлял лошадью подавая сигналы сидя у нее на голове и лошадь пахала как бы сама по себе.
+ Пассажирские перевозки. Лошадиный "убер". Не надо будет учится управлять лошадью, просто выбрал точку Б и поехал по велодорожке. (Потребуются междугородние велодорожки)
Как вам такой БиоКиберПанк?
Показать полностью
1