

Кто быстрее, Робот или Человек?
1: F.03 Livestream: Day 8 (Hour 168-180) (Оглавление по роботам)
1: F.03 Livestream: Day 8 (Hour 168-180) (Оглавление по роботам)
вырезать с ютуба тут: https://www.clipscutter.com/
следующий вырезальщик медленнее думает чем первый: https://ytvideocutter.com/
1: F.03 Livestream: Day 8 (Hour 168-180) (Оглавление по роботам)
4: Кто быстрее, Робот или Человек?
____________________
5: Роботы заправляют постель
6: Рободомохозяин
____________________
7: Робот складывает полотенца, и посуду в посудомойку
Робота разнесло на куски прямо во время полумарафона в Китае — он не заметил преграду, врезался в неё и развалился на запчасти.
В итоге остатки машины пришлось уносить с трассы.
экзоскелет: нет пророка в своем отечестве
молодчаги. слежу за такими приколюхами по мере возможности. если он хорош без приводов, то с приводами, манипуляторами, системой управления и оружием это будет мех штурмовой. будущее, вот оно, епта
для реального теста и раскрутки на международном уровне уже сейчас можно передать парочку экземпляров гималайским шерпам, которые сами альпинисты и водят других альпинистов на эверест за бабки. условия суперэкстремальные для теста. шерпы таскают на себе грузы и кровно заинтересованы унести побольше и подальше. не в собственность - пусть потестят. и дядю майора, типа секрет кремля.
p.s. если с шерпами не прокатит можно предложить жадным альпинистам, которые не хотят платить шерпам, но хотят подняться на эверест. тож клиенты потенциальные
p.s.s. понятно что самый цимес это военный заказ. но пока до верхов дойдет новая разработка, нужно чтоб низы все кости до колен стерли об дороги. в кои то веки появилась собственная перспективная разработка, которую легко модернизировать до суперэкзоскелета с приводами и управлением. причем можно же сделать два варианта: один гражданский с инструментом; другой армейский с тяжелым пехотным вооружением. стоит только засветиться такой разработке где нибудь в чужой горячей точке, тогда генералы будут бегать ужаленные и искать крайнего. также и дронами было. один рейс чего стоит, а это разработка начала 70-х. прикрутите к нему огнемет хотя бы. вот же готовый отечественный стартап с гигантским потенциалом по гражданке и оборонке
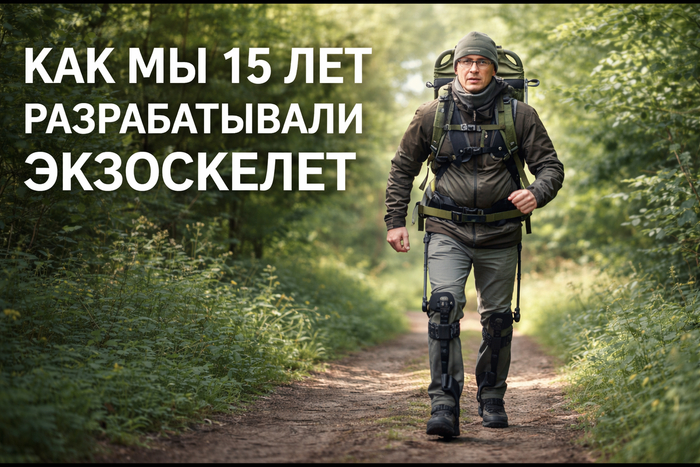
Привет, Пикабу. На связи Олег, команда «Напарник». Первая наша история здесь набрала больше 100 тысяч просмотров — спасибо, что так тепло встретили. Многие просили рассказать подробнее: а как вообще устроен пассивный экзоскелет? Что у него внутри? Как он «понимает», куда передавать усилие? И главное — почему он работает без единого провода?
Почему пассивный, а не активный?
Активные экзоскелеты — это моторы, гидравлика, контроллеры, батареи. Они крутые, но дорогие, тяжелые, требуют зарядки и обслуживания. Для промышленности, стройки, МЧС или туризма это часто перебор.
Наш «Напарник» — пассивный. Он не добавляет силы, он перераспределяет нагрузку. Вес груза уходит с позвоночника через внешний каркас прямо в землю. А все движения человек совершает сам, только с разгруженной спиной.
Это как если бы вы несли тяжелый рюкзак, но вместо спины его держала бы внешняя рама, "привязанная" к бедрам и спине. Никаких аккумуляторов, ничего не может разрядиться или сломаться в полевых условиях.

Сотрудник МЧС в движении, с грузом
Базовая механика: кинематика и точки опоры
Любой пассивный экзоскелет — это система рычагов и упругих элементов, которая следует за движениями человека. Мы не сковываем оператора — он может приседать, наклоняться, бежать, даже ползать. Чтобы этого добиться, нужно правильно подобрать кинематическую схему.
Основные узлы:
· Спинной блок — жесткая конструкция вдоль позвоночника. К нему крепятся наплечники и поясничный пояс.
· Тазобедренный узел — самая сложная часть. Он должен передавать усилие от спины к ногам, но при этом не мешать ходьбе. Мы используем шарнирные соединения, которые работают в трех плоскостях: сгибание-разгибание, отведение-приведение, небольшая ротация.
· Бедренные рычаги — идут по наружной поверхности ног. На них крепятся набедренные и наколенные бандажи.
· Голеностопные упоры — передают нагрузку прямо в землю, полностью разгружая ноги в статичном положении.
Вся конструкция — из алюминиевых сплавов и стали, в прототипах использовали и углепластик для снижения веса.
Как экзоскелет не мешает двигаться?
Главная проблема пассивных экзоскелетов — они не должны превращать человека в робота. Движения должны быть естественными.
Мы решили это двумя способами:
· Анатомическая параметризация (звучит сложно, но суть простая) — мы подгоняем расположение шарниров экзоскелета под анатомические оси вращения суставов человека. Если ось шарнира не совпадает с осью тазобедренного сустава, экзоскелет будет «тянуть» или натирать. Мы делаем индивидуальную настройку под рост и комплекцию.
· Минимальное количество связей — экзоскелет крепится к телу в нескольких точках: плечи, поясница, бедра, голени (по желанию). Жесткая связь только там, где нужно передавать усилие. Все остальное — свободное движение.
В результате в «Напарнике» можно приседать до параллели с полом, наклоняться практически до земли, бежать и даже ползать по-пластунски (проверяли на испытаниях)
Что мы сделали для надежности?
Поскольку экзоскелет предназначен для работы в тяжелых условиях (заводы, стройки, МЧС), то экзоскелет состоит из композитов, инженерного пластика и авиационного алюминия.
Все механические соединения — на подшипниках качения или скольжения с низким трением.
Крепления — быстросъемные ремни с фастексами (пристегнул за секунду, не снимая перчаток).
Вес базовой версии — до 4 кг. В рюкзаке в разобранном состоянии помещается целиком, можно перевозить в багажнике или сумке.

Экзоскелет в разобранном состоянии
Как мы тестировали (и тестируем)
Сейчас мы проводим собственные испытания на базе прототипов:
· Ходьба с грузом 30 кг (до 5 км без снятия)
Также тестируем экзоскелет в горном туризме — один из наших конструкторов, ходит с ним в походы с рюкзаком 20 кг. Обратная связь позволяет нам доводить эргономику.
Почему мы не используем титан (и другие сложные материалы)
Часто спрашивают: «Почему алюминий, а не титан?» Отвечу прямо. Титан крутой, но дорогой, сложнее в обработке и для серийного образца неоправдан. Наша цель — сделать доступный экзоскелет, который можно тиражировать. Поэтому базовые детали из алюминиевых сплавов и стали. Углепластик используем там, где критичен вес (например, на спинном блоке), но это увеличивает стоимость.
Мы уверены: надежность достигается не материалом, а инженерным расчетом. И наши испытания это подтверждают.
Что дальше?
Сейчас мы дорабатываем конструкцию под серийное производство. Параллельно работаем над облегченной гражданской версией для туристов, охотников и видеографов.
В планах — расширить линейку модулями для разных профессий: для сварщиков, для грузчиков, для монтажников-высотников.
Экзоскелеты — это не фантастика. Это рабочая инженерия, которая уже помогает людям на тяжелых производствах и в экстренных службах. Если вам интересны детали, задавайте вопросы в комментариях. Я, Сергей и Максим будем на связи. Расскажем про расчеты, про выбор пружин, про то, как мы делаем 3D-модели и собираем прототипы в гараже (да, всё начиналось именно так).
Спасибо, что интересуетесь технологией. Мы продолжим делиться опытом.
Девушка докопалась до робота, что он не размовляет спевуче-соловьиною мовою. Робот ответил, что в список его приоритетных языков украинский язык не входит.
А что значит "неповага"?

