



Необычный дрон-инспектор подзарядится от линий электропередач
Индустриальные беспилотные летательные аппараты (БПЛА), выполняющие широкий спектр функций, также, как и все дроны, имеют ограниченный запас энергии. Однако ученые из Университета Южной Дании разработали технологию, которая практически устраняет это ограничение.
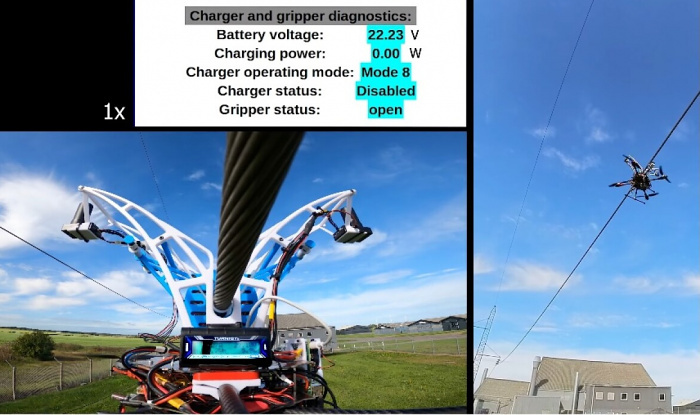
Их созданный квадрокоптер на основе дрона Tarot 650 предназначен для инспекции линий электропередачи (ЛЭП) и, благодаря специальной системе захвата, способен получать заряд прямо от ЛЭП, что позволяет ему находиться в воздухе практически неограниченное время.
Помимо литий-полимерного аккумулятора емкостью 7000 мА⋅ч, дрон оснащен микрокомпьютером Raspberry Pi 4 B, автопилотом Pixhawk V6X, радаром миллиметрового диапазона и RGB видеокамерой. Когда программное обеспечение БПЛА обнаруживает низкий заряд аккумулятора, в действие вступают камера и радар для определения местоположения ближайшей ЛЭП, после чего дрон направляется к ней.
Подлет к линии осуществляется снизу. Специальный захват обеспечивает зацепление за провод. После захвата провода две эластомерные ленты подтягивают его, обеспечивая надежный контакт. Затем включается система управления, удерживающая дрон в воздухе.
Индуктивное зарядное устройство включается для зарядки батареи от ЛЭП. По завершении процесса захвата дрон может продолжить выполнение задачи. Испытания в датском аэропорту показали, что опытный дрон весом 4,3 кг проработал более двух часов с пятью подзарядками между проверками ЛЭП.
Показать полностью

Беспилотные комбайны поселились под Тамбовом
🚜В Тамбовской области начали выпускать беспилотные комбайны. Их научат ровно проходить по полю, избегая пропусков и перекрытий. Также на площадке планируют наладить выпуск беспилотных летательных аппаратов и запчастей для сельхозтехники.

Как подготовить машину к долгой поездке
Взять с собой побольше вкусняшек, запасное колесо и знак аварийной остановки. А что сделать еще — посмотрите в нашем чек-листе. Бонусом — маршруты для отдыха, которые можно проехать даже в плохую погоду.

Морские дроны
Это будет наверное один из самых коротких дилетантских обзоров. Моё мнение упирается в то что беспилотники в море это слишком слабый инструмент поддержки.
Да неплохо себя сейчас показывают катера Камикадзе. Эти катера обязательно нужно производить так как это возможность небольшой пехотной группе ударить по кораблю. И не важно что это боевой корабль или транспортный, комбатанты запускают или очередные “террористы”, подводного или надводного типа. Решена будет проблема в и уничтожения если на кораблях и катерах стоят установки которые позволяют сбивать ракеты в полете. Если есть системы позволяющие обнаружить подводную лодку, то обнаружить такую цель в общем-то не особо проблема. И тут конечно хотелось бы видеть единую систему обнаружения и управления начиная от беспилотников сопровождения до интеллектуальных систем наведения оружия. Хотя для начала было бы неплохо установить тумбы под более- менее мощное стрелковое оружие и тренироваться в отражении атак.
Разведка: думаю тут просто рай для дронов: слышал даже о мини- катамаране, плавающим по волнам и получающим электропитание от солнечных батарей. Это как водный аналог Орлана. Думаю что это просто идеальная машина если они будут массово дешёвые и объединены в единую сеть с единым децентрализованным центром обработки данных. Вот как морские мины можно выставлять.
Дроны снабжения считаю невозможными. Ну не те объемы для флота эти катера. Хотя если будет массовое производство БЭК, то какую-то часть из них просто можно пустить на специфические цели снабжения. Но это очень специфические (отнюдь не невозможные) цели.
Катера поддержки. В принципе будущее за универсальной платформой, которая может нести на себе оружие или оборудование, которое считают необходимым для поддержки здесь и сейчас: мины или оборудование для траления, торпеды или акустический буй, небольшая скорострельная артиллерия или платформа для запуска летающих беспилотников, сонар и глубинные бомбы, и т.д. Задача как таковая это сопровождение более крупных целей и работа по алгоритму. Например такие катера могут спокойно противостоять волчьим стаям подводных лодок (или их современной версией с помощью БЭК), ПВО/ПРО на дальних рубежах, уничтожение разведывательных дронов противника, и т.д.
Не считаю возможным дронифицировать большие корабли, так как большой корабль можно автоматизировать по максимуму, но заменить там экипаж в принципе невозможно. аналогично в подводных лодках. Кроме того этот, по своей сути, москитный флот, всего лишь поддержка основному флоту. И в принципе будет неплохо если эту поддержку можно будет перевозить по суше к любому региону действий.
Почему не говорил про спутниковую связь, селекцию целей ИИ, роботизированное конвейерное производство и прочие? Ну я об этом постоянно говорю, здесь это будет конечно же не лишним. Пишу это чтобы оставили мысли про это мою голову.
UPD:
Я как то забыл фром- фактор гидросамолетов. Беспилотники такого типа выбрасываемые с контейнеров в воду могут придать массовость авианалету с моря. Ну это при штиле
Показать полностью


Управление дроном силой мысли
Всем привет!
Не так давно провел очень интересный опыт со своим нейроинтерфейсом. Нейроинтерфейс новой модели и был доработан до работы с дронами только к концу прошлого года.
Но для начала напомню что это вообще такое.
Нейроинтерфейс (или интерфейс «мозг – компьютер») – так называется устройство для обмена информацией между мозгом и внешним устройством. В качестве объекта управления может выступать не только компьютер, но и любое другое электронное устройство: квадрокоптер, система «умного дома», промышленный робот или боевой дрон, экзоскелет и даже искусственные органы чувств.

Нейроинтерфейсы бывают инвазивные и неинвазивные. Инвазивные это те что внедряются в череп. Они очень сложны и опасны в использовании и установке. Мой нейроинтерфейс неинвазивный и полностью безопасный. MS-04D (это версия конца 23 года) является дальнейшей глубокой модификацией модели MS-04C (это версия конца 22 года) . И несмотря на внешнее сходства имеют много отличий.
MS-04D имеет встроенный контроллер ардуино нано. Это позволяет не только быстро изменять и дополнять стандартную прошивку, но и загружать свои алгоритмы анализа.
Встроенный акселерометр гироскоп. Это позволяет определять движение головы. По сути ещё один канал данных .
Собственный протокол N-03 . В отличии от протокола нейроскай более понятен и не зашифрован. К протоколу нейроскай была добавлена возможность работы с lsl.
Ms-04D является одноканальным неинвазивным нейроинтерфейсом . Этот интерфейс снимает ЭЭГ и данные с гироскопа и отправляет его через bluetooth на сопряженное устройство (телефон, пк, иные bluetooth устройства) .Так же возможна работа через USB. Устройство может как проводить простейший анализ само, так и посылать сырой сигнал на устройство.
Само устройство сделано пластикового печатного корпуса (пластик petg) и электроники на затылке. Чтобы обезопасить электронику от случайных ударов она закрыта в коробочки. Питание осуществляется через встроенный аккум . Зарядка через usb. Устройство одноканальное. То есть оно снимает сигнал с одной точки на лобной доле. Можно снимать как с правой так и левой доли.
Для съема такого сигнала нужны особые точки относительно которых проходит измерения. В нашем случае это мочки ушей. Там нет эл. сигналов и поэтому на них крепятся прищепки — электроды.
В устройство встроены фильтры шумов и очень мощный усилитель — сигнал проходит всегда.
Анализируется следующая информации :
1.Исходная электроэнцефалограмма (сырец сигнал нужен для протокола lsl)
2.Определяются следующие мозговые волны: Дельта, Тета, Низкие Альфа, Высокие Альфа, Низкие Бета, Высокие Бета, Гамма
3.Данные с гироскопа: Ускорение по трем осям и угловая скорость по трем осям.
На нейроинтефейс имеется огромное количество ПО для прикручивания его буквально ко всему
https://vk.com/@-112940624-programmy-skripty-i-dokumentaciya-dlya-ms-04d
Опыт с дроном:
Собственно был дрон JJRC H36 Mini. Простой и мелкий дрон с пультом. Работающий через 2.4 ггц радио сигнал.
Управлять...довольно сложно , но взлет почти стабильный. Команда на взлет и полет "вперед" осуществляется увеличением интенсивности альфа-ритма мозга. Ну если по простому то при определенном уровне расслаблении и уменьшения концентрации на чем то дрон и активируется. Команды на полет в сторону дает уже бета ритм. Это как раз концентрация. Разная бета - разные стороны полета.
Ну и корректировка полета встроенным гироскопом.
Вообще после тренировки с этим всем может справиться каждый. Очень важно чтобы вокруг не было помех только.
Это не первый и не последний нейроинтерфейс. Сейчас ведутся работы уже по улучшению 8 канального и оптимизированного на чтение "мыслей о движении" ( т.к. называемых воображаемых движений с моторной коры).
Тут на порядок сложнее всё делается.
Ну и напоминаю что про это всё можно почитать у нас в группе или посмотреть другие нейропроекты у нас в дискорде.
Спасибо за внимание. Подписываемся и всё такое.
И наш дискорд где можно про все это поговорить и спросить!
https://discord.gg/pMZN7TM
Показать полностью
2
2


Беспилотный летательный аппарат «Акила» (США)
Документальный фильм: Беспилотный летательный аппарат «Акила» (США) Год выпуска: 1988 года Производство: Киностудия Министерства Обороны СССР
Показать полностью
Система Black Recon обеспечит автоматический захват возвратившихся дронов
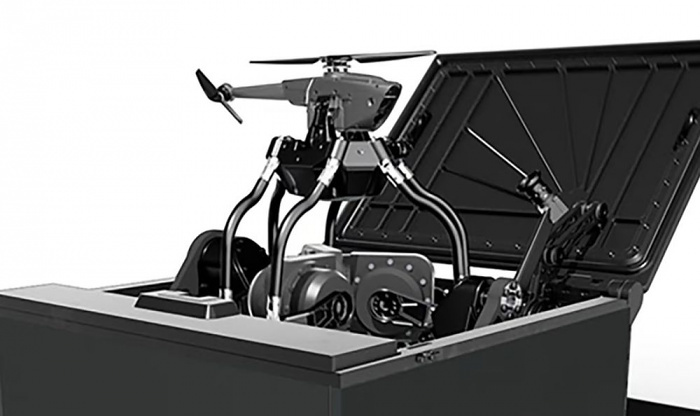
Беспилотники превратились в важнейшее средство ведения современной войны, чем не преминули воспользоваться ведущие технологические компании. Дочерняя компания Teledyne Technologies — Teledyne FLIR (США) представила автономную систему «Black Recon» для захвата вернувшихся с задания дронов.
Подставка размещается в задней части военной машины, рассчитана на автономный запуск и возвращение до трех небольших беспилотников вертолетного типа. Причем делать она это может с движущегося автомобиля без участия человека.
К примеру, БПЛА, оснащенные камерами с функцией ночного видения, летят впереди движущейся машины или колонны, предупреждая о находящихся впереди препятствиях — минах, завалах, СВУ и других.
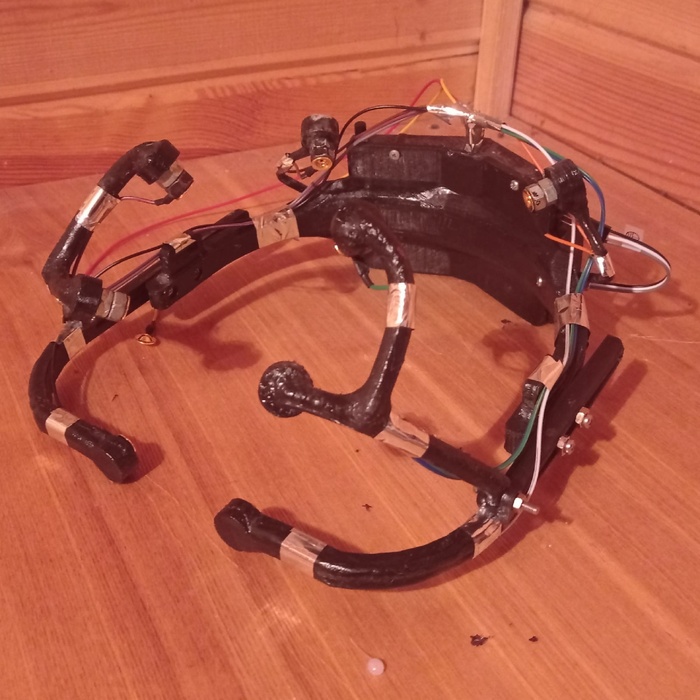
Когда аккумуляторы беспилотника близки к полной разрядке, он подлетает к «аэродрому», где система Black Recon захватывает его прямо на лету за фюзеляж с помощью специального механизма, состоящего из шести роботизированных манипуляторов, после чего укладывает дрон в пусковой отсек
Показать полностью
1
Пульсирующие воздушно-реактивные двигатели компании Wave Engine (США)
Беспилотные летательные аппараты самолетного типа могут оснащаться двигательными установками разных классов. В частности, американская компания North American Wave Engine Corporation предлагает использовать пульсирующие воздушно-реактивные двигатели (ПуВРД) и ведет разработку подобных устройств. Ранее она неоднократно демонстрировала свои двигатели на стенде и на летательных аппаратах. Сейчас компания проводит испытания экспериментального БПЛА Scitor-D, оснащенного двигателем типа J-1.
Процесс разработки
Компания North American Wave Engine Corporation (сокращенно Wave Engine Corp.) была основана в г. Балтимор (шт. Мэриленд) в первой половине десятых годов бывшими сотрудниками ведущих предприятий США в сфере двигателестроения. Целью компании с самого начала стала разработка пульсирующих воздушно-реактивных двигателей с разными характеристиками, пригодных для применения на тех или иных летательных аппаратах.
В 2016 г. Wave Engine Corp. начала стендовые испытания первого ПуВРД собственной разработки. Первые реальные результаты проекта позволили рассчитывать на поддержку со стороны потенциальных заказчиков. Так, в 2019 г. компания получила от агентства DARPA 2,85 млн долл. на продолжение работ. Позже фирма получала и иные гранты того или иного размера.

Экспериментальный планер с ПуВРД, 2020 г.
В следующем году опытный двигатель – вероятно, за счет денег от Пентагона – довели до летных испытаний. В качестве воздушной платформы для опытного ПуВРД использовался серийный безмоторный планер. Установка двигателя серьезно улучшила его летные данные и продолжительность полета. Кроме того, в ходе таких испытаний показали потенциал летательного аппарата, использующего оптимизированную аэродинамику и пульсирующий двигатель.
В июне 2021 г. Управление вооружений ВВС США выдало компании Wave Engine заказ на разработку «универсальной платформы воздушного базирования» Versatile Air-Launched Platform (VALP). Стоимость контракта составила 1 млн долл.; сроки его исполнения не уточнялись. Сообщалось, что целью проекта является создание малоразмерного БПЛА с ПуВРД, способного нести небольшую полезную нагрузку. В частности, рассматривалась возможность его использования в качестве ложной цели для обмана ПВО противника.
К моменту получения контракта на VALP компания-разработчик успела сформировать общий облик такого изделия и даже опубликовала художественную демонстрацию его применения. В дальнейшем работы по проекту продолжились, но их результаты пока остаются неизвестными. Готовый БПЛА, похожий на картинки 2021 г., еще не показан.

Двигатель типа J-1
Достигнутые результаты
Несмотря на наличие заказа на разработку многоцелевого БПЛА, основной сферой деятельности Wave Engine остается создание пульсирующих воздушно-реактивных двигателей. К настоящему времени разработано два таких изделия с отличающимися характеристиками, готовых к использованию на летательных аппаратах разных весовых категорий. Кроме того, анонсировано появление новых ПуВРД.
Компания предлагает заказчикам два двигателя. Первый имеет обозначение J-1 и предназначается для летательных аппаратов с взлетной массой не более 200 фунтов (90,8 кг). Он развивает тягу до 55 фунтов (25 кгс). Также разработан схожий двигатель K-1, отличающийся увеличенными размерами и тягой 220 фунтов (ок. 100 кгс). Им предлагают оснащать воздушные платформы массой до 1000 фунтов (454 кг). Предполагается, что следующие образцы такого семейства по своим параметрам будут превосходить изделие K-1.
ПуВРД от Wave Engine построены по бесклапанной схеме, которая позволяет упростить конструкцию и получить высокий ресурс. Двигатель выполнен в виде U-образной трубы переменного диаметра. Верхняя часть такого устройства имеет меньший диаметр, но несет цилиндрическую камеру сгорания увеличенного сечения. Нижняя труба выполнена конической и имеет больший диаметр. Торцы трубы выполняют функции сопел. Специально для новой серии двигателей разработана электронная система управления, контролирующая подачу топлива и работу в целом.

Изделие K-1
Принцип действия таких двигателей достаточно прост. В камеру сгорания впрыскивается порция горючего и производится зажигание. Продукты горения истекают через обе трубы-сопла, направленные к хвосту летательного аппарата, и создают тягу. При этом в определенный момент времени тяга в нижней трубе большего диаметра превышает тягу в верхней, и последняя начинает затягивать атмосферный воздух в камеру сгорания. Затем производится новый впрыск топлива, и цикл повторяется. Из-за отсутствия постоянного горения и использования последовательных вспышек, такой ВРД именуется пульсирующим.
Опытный беспилотник
Для летных испытаний двигателя J-1 с тягой 25 кгс компания Wave Engine разработала оригинальный беспилотный летательный аппарат под названием Scitor-D. В начале марта компания сообщила о начале его летных испытаний и опубликовало видеоролик с первым полетом. Испытания будут продолжатся и обеспечат отработку конструкции БПЛА и ПуВРД, а также их взаимодействия.
БПЛА Scitor-D построен по нормальной аэродинамической схеме. Он имеет удлиненный фюзеляж переменного сечения с внутренними отсеками для полезной нагрузки, аппаратуры и жидкого горючего. Пульсирующий двигатель при помощи удерживающих устройств размещен над фюзеляжем. Используется крыло с небольшой стреловидностью, оснащенное выступающими обтекателями основных стоек шасси. Хвостовое оперение выполнено по Н-образной схеме и не мешает работе двигателя.

Общий вид БПЛА Scitor-D
Взлетная масса беспилотника определена параметрами двигателя J-1 и составляет 100 фунтов. На борту может присутствовать полезная нагрузка массой 20 фунтов (ок. 9 кг). Размеры изделия не уточняются. Показанное видео позволяет предполагать, что размах крыла БПЛА достигает 3-3,5 м. Максимальная скорость полета заявлена на уровне 200 узлов (370 км/ч). Дальность и продолжительность полета, достигаемые за счет необычной двигательной установки, неизвестны.
На данный момент опытный БПЛА Scitor-D несет упрощенный набор бортовой аппаратуры. Она обеспечивает прием и исполнение команд оператора, а также сбор и передачу данных. В ходе дальнейшего развития беспилотник может получить дополнительные приборы для решения практических задач. Из-за ограниченной грузоподъемности беспилотник сможет нести только средства оптической или радиотехнической разведки. Применение оружия не представляется возможным.
Впрочем, главной задачей изделия Scitor-D на данный момент является не ведение разведки или выполнение иных реальных задач, а демонстрация возможностей ПуВРД. При помощи этой разработки компания Wave Engine хочет показать потенциал подобных двигателей в целом, а также определить их реальные возможности в сфере беспилотной авиации. По сути, речь идет об эксперименте и своего рода рекламе будущих разработок в этой области.
Собственные проекты были у Великобритании и Германии. Последняя в годы Второй мировой войны отличилась созданием управляемых бомб и серийным производством КР «Фау-1» и «Фау-2».

И восстали машины из пепла ядерного огня, и пошла война на уничтожения человечества. И шла она десятилетия, но последнее сражение состоится не в будущем, оно состоится здесь, в наше время, сегодня ночью.
Показать полностью
6