Привет, пикабу!
Хочу начать с того, что по опыту моей 20летней жизни, прихожу к выводу, что я - идеалист.
Не знаю хорошо это или плохо, но на примере этого рассказа/отчета/инструкции, покажу, что происходит, когда я загораюсь какой-то идеей.
В начале месяца, было получено приглашение на тематическое празднование дня рождения. Темой вечера были - супергерои и их костюмы.
Соответственно правила простые - сделать/купить/синтезировать костюм супергероя.
Также были объявлены три критерия оценивания:
Схожесть с оригиналом;
Необычность использованных в костюме материалов и атрибутов;
Критерий смешнявости;
В тот же вечер, как пришло приглашение, я понял, что нужно делать что-то интересное и эффектное.
Так как я не особо большой поклонник марвел/дс, нашел видео - "топ 10 костюмов супергероев". На каком-то из мест этого рейтинга был костюм...
... доктора октавиуса из второго человека паука.
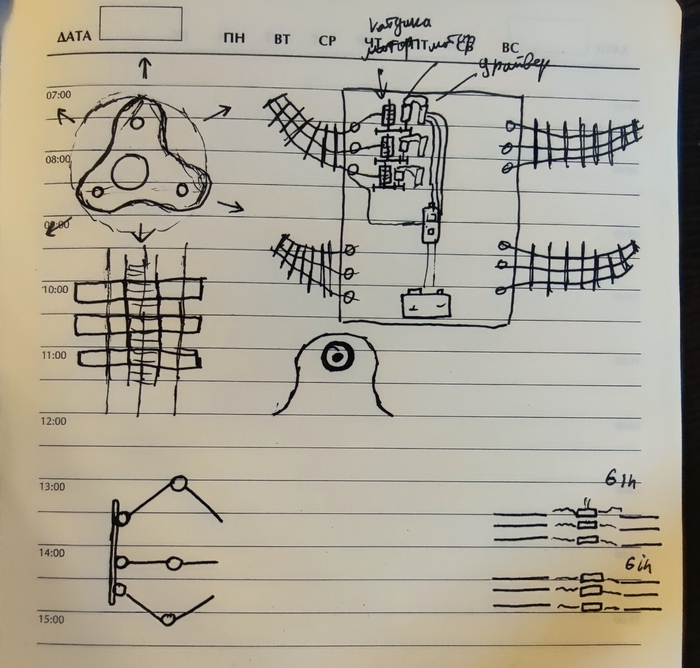
Я сразу же понял что это судьба, всё, делаю манипуляторы. В этот же вечер был сделан небольшой набросок, эскиз если хотите, как все это должно выглядеть и работать, в моем представлении:
Слева сверху - поперечное сечение манипулятора, и 6 степеней свободы (как мне тогда казалось, да да)
Движение щупалец, по моим предположениям должно было осуществляться благодаря натежению или отпуску троса, продетого в каждое из трех отверстий по краям.
Соответственно, при натяжении одного из них, движение осуществлялось в данную сторону. При натяжении двух, движение происходило повектору равнодействующей силы.
Под первым эскизом - продольное сечение. Сердцевина должна быть одновременно и жёсткой, и гибкой. Для этого был выбран шланг от пылесоса. И тросы, показаны так, как они должны располагаться.
Справа мы видим платформу, к которой крепятся щупальцы, и на которой располагаются все необходимые компоненты.
Натяжение тросов планировалось осуществлять за счёт наматывания их на барабан, который вращался мотор редуктором, который, в свою очередь упралялся драйвером, и ардуиной, в конце всей этой цепочки.
И так, прежде чем покупать все необходимое, мне нужно было сделать макет.
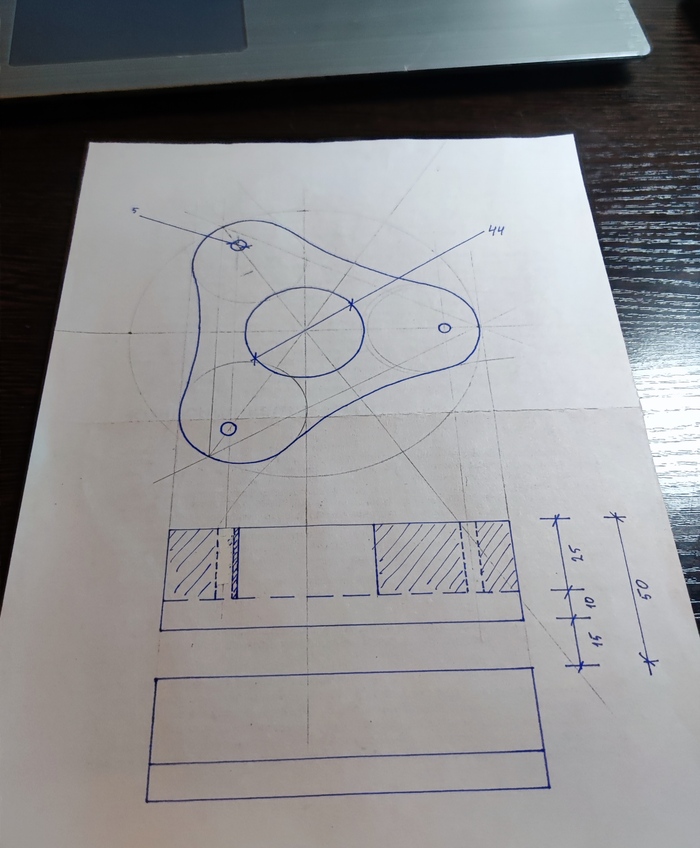
Если внимательно посмотреть на оригинал, мы видим, что они представлены в виде секций, закрепленых на одной направляющей.
Предварительный чертёж секции выглядит вот так:
Только сейчас понял, что забыл написать, манипуляторы будут сделаны из картона.
Не закрывайте пост, вы можете недооценивать могущество этого материала, особенно когда он ТРЁХСЛОЙНЫЙ.
На этом этапе я слабо представлял объёмы работы, и на всякий случай взял 50 листов картона 0,8 * 1,2м прям со склада завода изготовителя.
И так, до дня X осталось около 20 дней.
Макет решено было не делать, а просто сконструировать одну щупальцу, и на ней проверить работоспособность конструкции, прежде чем делать остальные три.
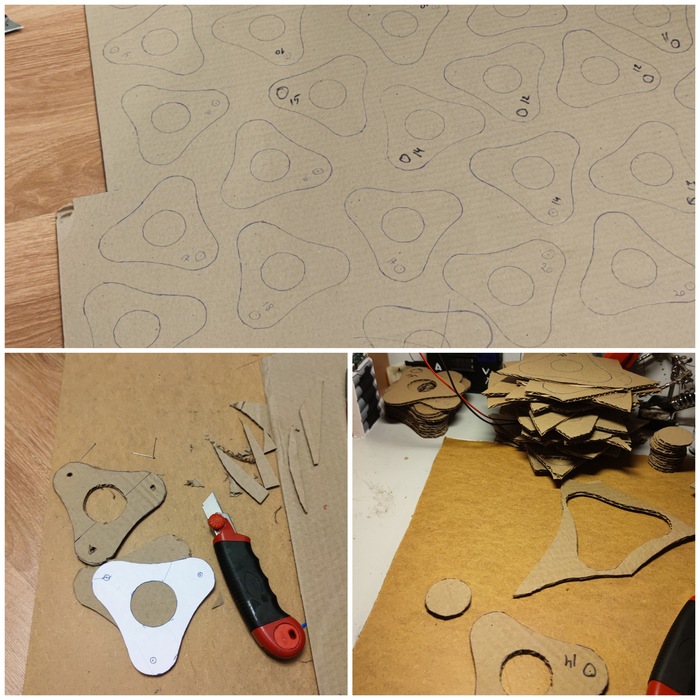
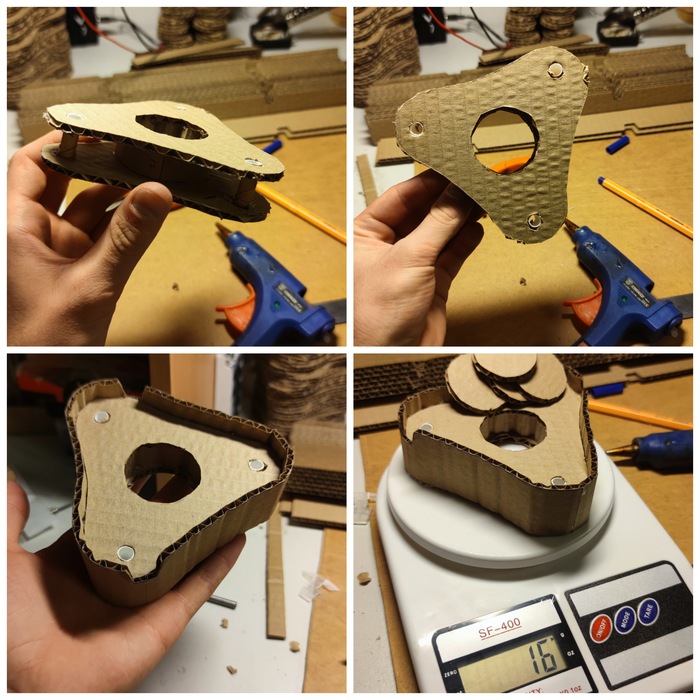
По чертёжу сделал первую пробную секцию, для уточнения веса и проверки в целом на прочность.
Секция представляет из себя две пластины, соединённые между собой цилиндром(скрученная полоска картона), и обклеенные полоской картона по наружным граням.
Оптимальную длину щупальцы по расчётам принял 1 метр. (был учтен момент силы относительно края манипулятора и заявленное тяговое усилие мотор-редуторов)
Соответственно на 1 метр получилось по 20 секций.
Первым шагом я сделал шаблон секции, вырезал из картона, обмотал скотчем, и прогладил утюгом, для большей жёсткости.
И вырезал 40 пластин по этому шаблону.
Для увеличения жёсткости, между отверстиями для троса планировалось вставить втулки. Решил их делать из трубочек для напитков, но придя в магазин нашёл это:
Тот самый случай, когда искал медь, а нешел золото.
Картонные трубочки для напитков.
Они идеально подходили - лёгкие, жёсткие, нужного диаметра.
Готовая секция весила всего 16 грамм, очень жизнеутверждающе, подумал я, и принялся дальше клеить.
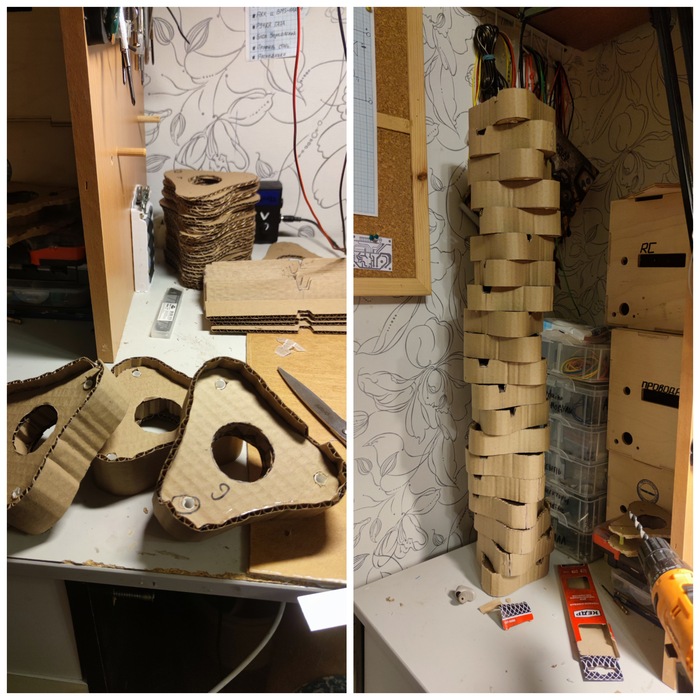
Двадцать штук склеил примерно за 2-3 часа.
Перед дальнейшем монтажем, решил сразу их покрасить.
Красил обычной аэрозольной чёрной краской.
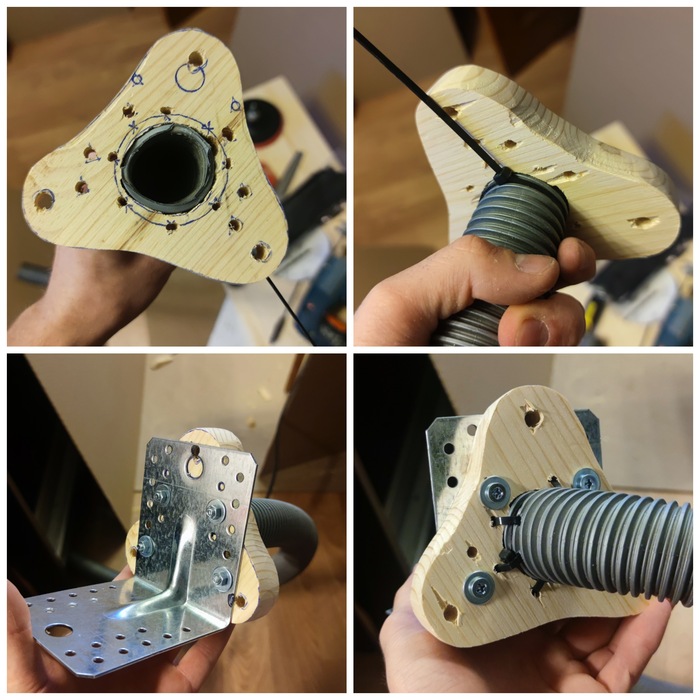
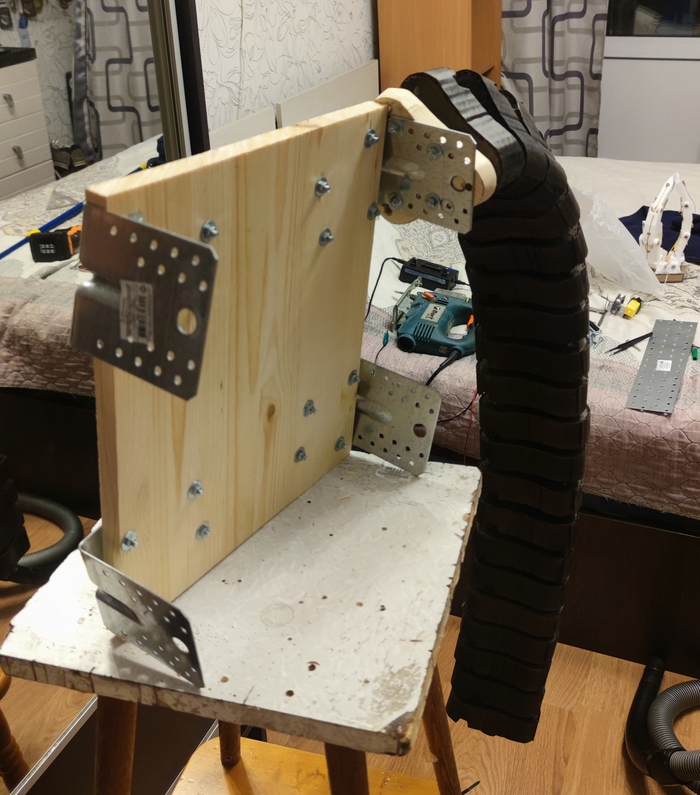
После покраски начал насаживать их на шланг. Первую, соеденительную деталь вырезал из дерева, закрепил на хомуты и клей.
Деревянную деталь вырезал также по шаблону для картонных пластин.
Крпеление манипулятора осуществлено через металлический уголок.
Уголок важно было разместить так, что бы "тяги" проходили в отверстия, но в одном месте этого не получилось, поэтому пришлось высверливать.
Каждую деталь приклеивал горячими соплями с двух сторон. Конечно выглядит не супер надёжно, но поверьте мне, на отрыв, скорее ломалась секция, чем отрывался клей.
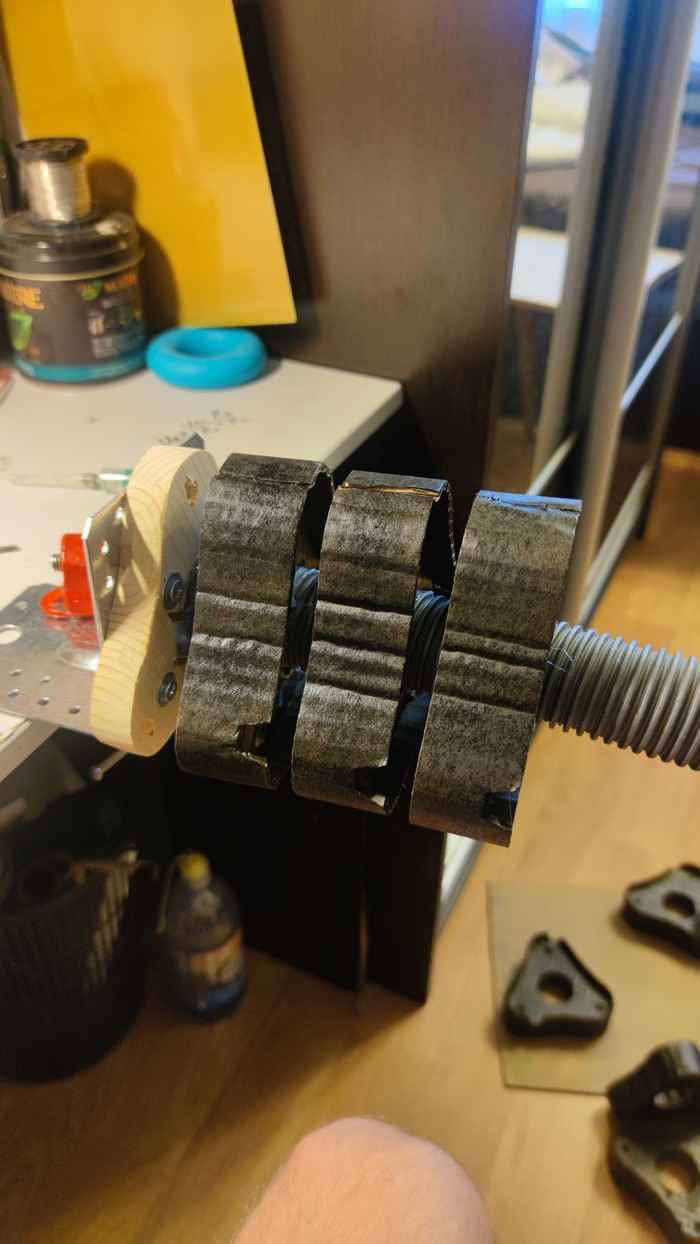
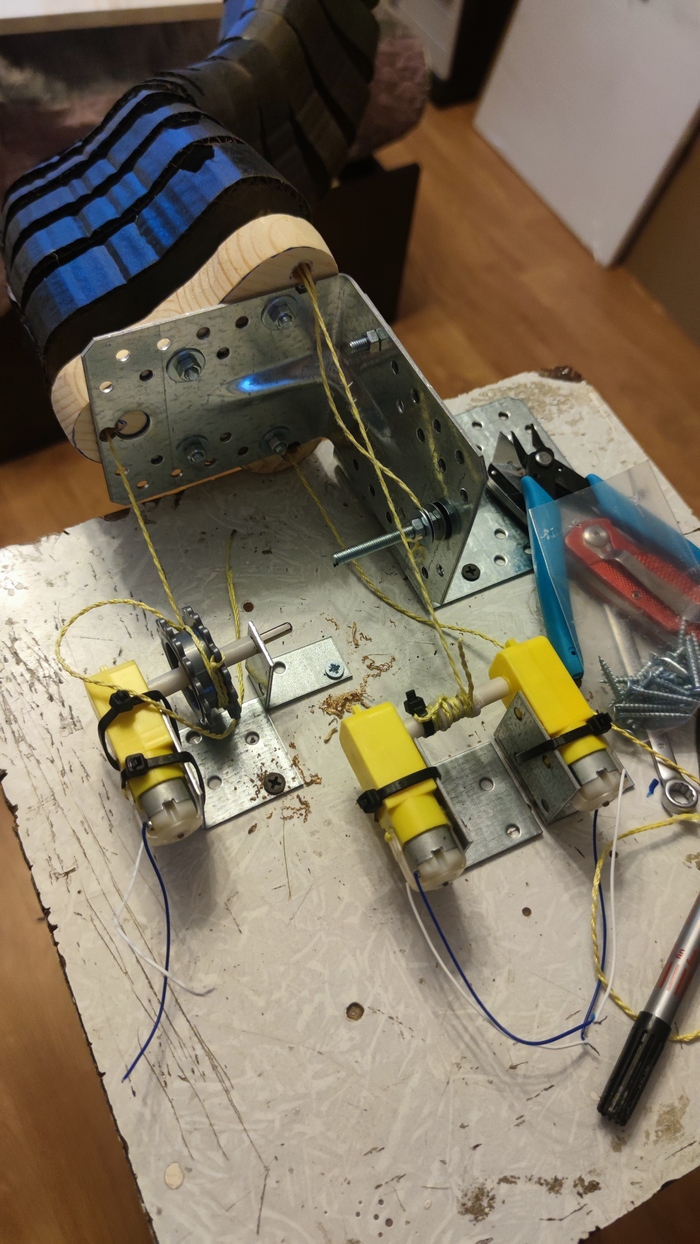
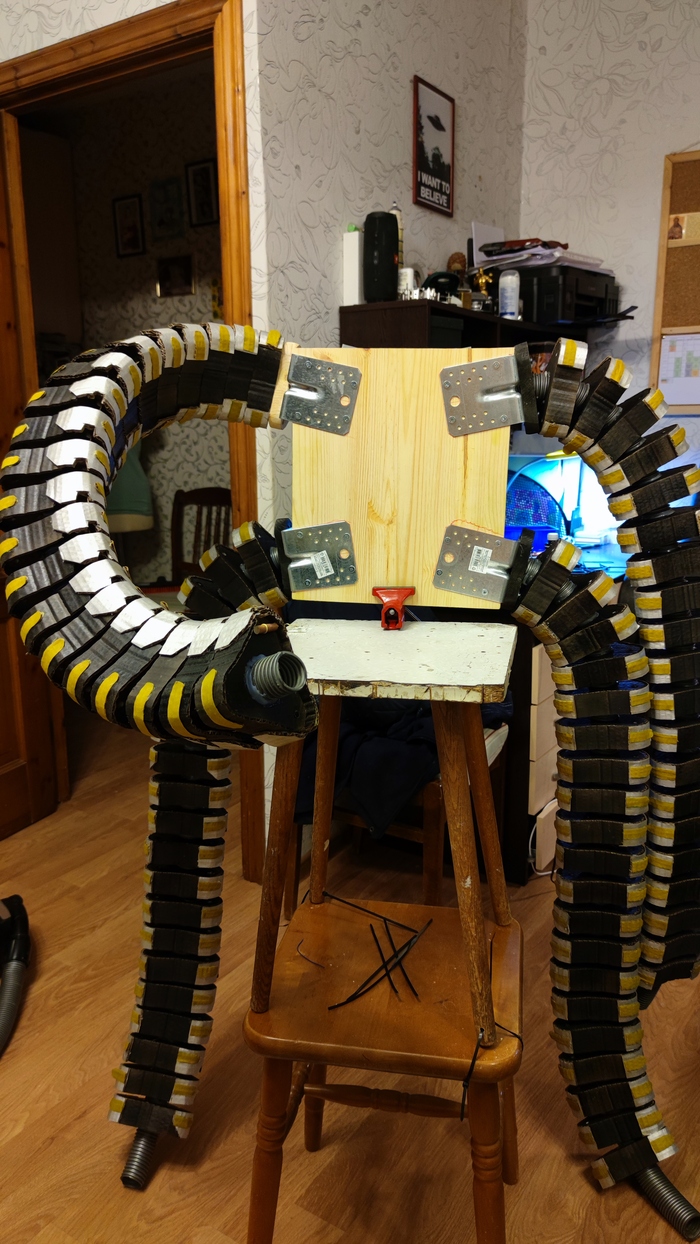
Предварительную компановку устроил на старой табуретке. В роли движетелей использовал китайские мотор-редуторы.
При первом испытании я столкнулся с проблемой. Одного мотора на трос, как планировалось изначально - не хватило, поэтому пришлось объеденить два редуктора, и инвертировать направление второго. После дальнейших тестов с разными комбинациями компоновки, было принято решение объеденить моторы только на "поднимающий" трос. Это тот трос, который поднимает манипулятор в горизонтальное положение, как видно на фото выше.
После соединения всех трех тяг с их двигателями, и пробным запуском, меня ждало второе разочарование, механика щупальцы получилось совершенно другая. При натягивании одного троса, манипулятор просто принимал форму дуги, при натяжении двух других в разных комбинациях, менялось положение дуги в пространстве, но не форма самой "дуги".
Это можно было учесть, сделав подвижную 3d модель в solide например, но времени было мало.
Подумав, было решено оставлять компановку в виде двух соединённых "поднимающих" моторов, и одного напраляющего.
По итогу щупальца поднималась, и поворачивалчсь в двух направлениях. Для "костюма на вечеринку" меня устроил этот вариант, и я продолжил работать дальше.
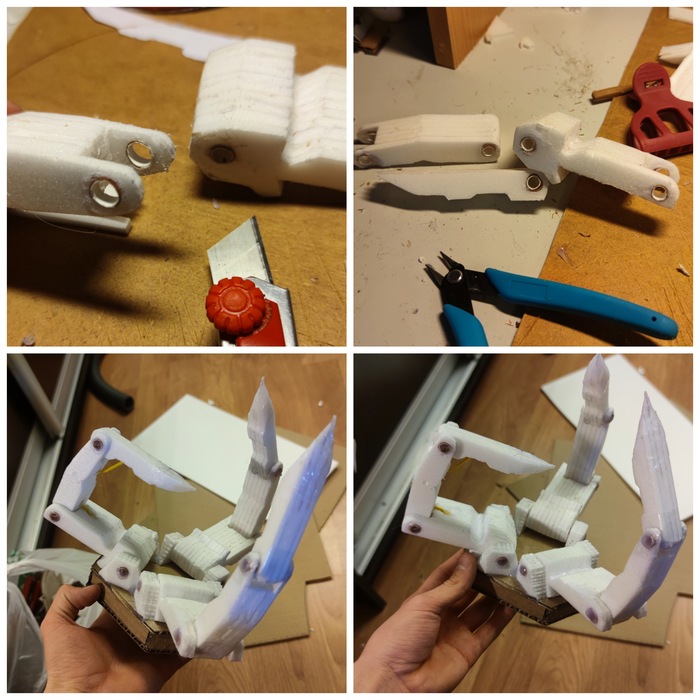
Следующим этапом я приступил к клешне.
В интернете очень много схем захватных механизмов с двумя приводами, но очень мало с тремя.
Поэтому было решено выбрать самую простую.
Для изготовления каждой детали, был использован принцип "сендвича" с использованием потолочных пенопластовых плит и клея титан. Такая схема повышала прочностные характеристики, ну и ещё у меня небыло толстых пенопластовых панелей, так конечно было бы гораздо быстрее и проще))
На создании одной только клешни, ушло столько же времени, сколько и на весь манипулятор. Процесс вырезания каждой детальки и склеивания их между собой, очень замедлял процесс.
Я решил оставить захватный механизм временно в таком виде, и продолжил заниматься остальными манипуляторами, так как время очень пожимало.
Сделал base, так называемую "баазу" для крепления манипуляторов к спине.
И принялся работать над остальными тремя "руками".
Времени оставалось около недели, поэтому нужно было срочно ускоряться, работы было очень много (а ещё университет и нормальная работа))))
60 секций, 120 пластин, и 420 деталей всего, было вырезано для трех манипуляторов.
Желаю каждому очнуться в 4 часа ночи, когда весь в пыли от картона, пропускаешь титры мстителей, и только в этот момент приходит осознание, "насколько комично то, чем я занимаюсь".
Да, кстати, было принято стратегическое решение пересмотреть все фильмы от марвел, для большего воплощения в образ.
И так, все 120 штук поклеены и покрашены.
Но чего-то не хватает..
Не хватет 380 декоративных деталек, для более близкого подобия к оригиналу.
Тут у меня есть только фото готовых, покрашеных пластинок.
Я предусмотрел зеркальность покраски, но совершенно забыл о направлении волокон.
При поклейке изрядно намучился, сгибая продольные волокна. (да и вообще, как оказалось позже, делать декоративные штуки из гофрокартона так себе идея. Плохо держат форму, плохо приклеиваются)
Ещё несколько дней клея, и результат на лицо!
Точнее на спину)
Выглядит эпично, но нельзя же просто надеть их на себя, и придти в обычной одежде?
На авито было найдено пальто за 100р
Шляпа за 200р
И очки за 400р
Пальто на несколько размеров больше,поэтому под него надеваем кожаную куртку.
Вернёмся к модели.
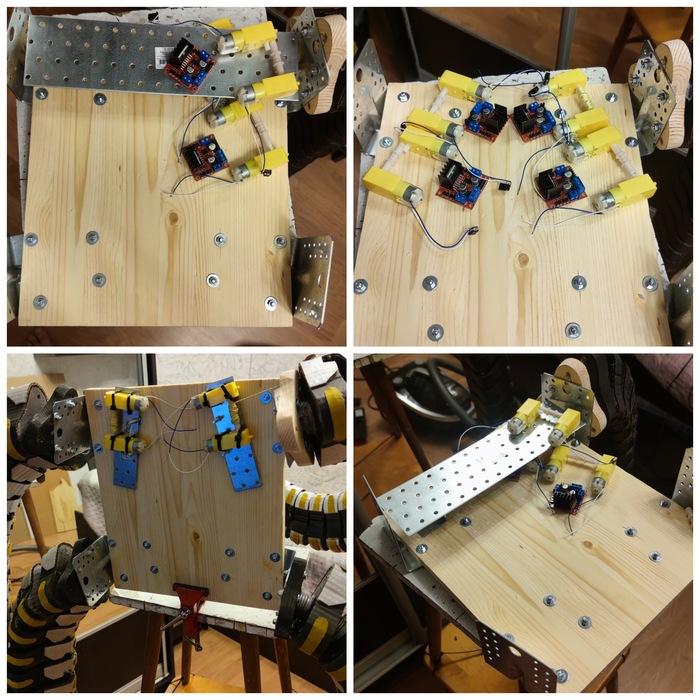
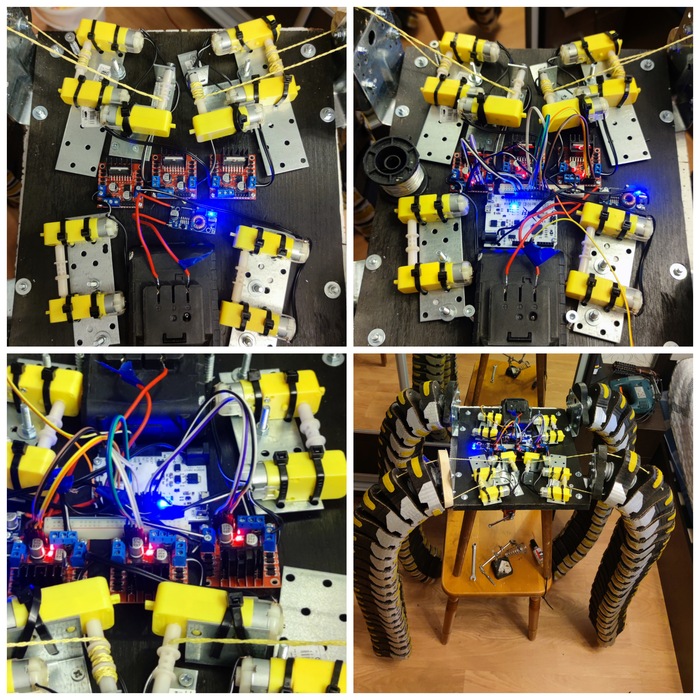
Примеряем расположение всех электронных и механических компонентов.
Проверяем что все работет, и собираем все компоненты окончательно.
Работает все, как писалось выше, под управлением ардуино.
Код был написан второпях, сутра, в день празднования. Времени было мало, поэтому реализовал просто хаотичное движение,по времени. Замерил сколько требуется времени до полного поднятия и полного опускания, и настроил на работу в пределах этого диапазона. Так-же быстро были доделаны какие-то мелкие моменты. Захватные клешни как вы понимаете я не успел доделать... Поэтому отправился так.
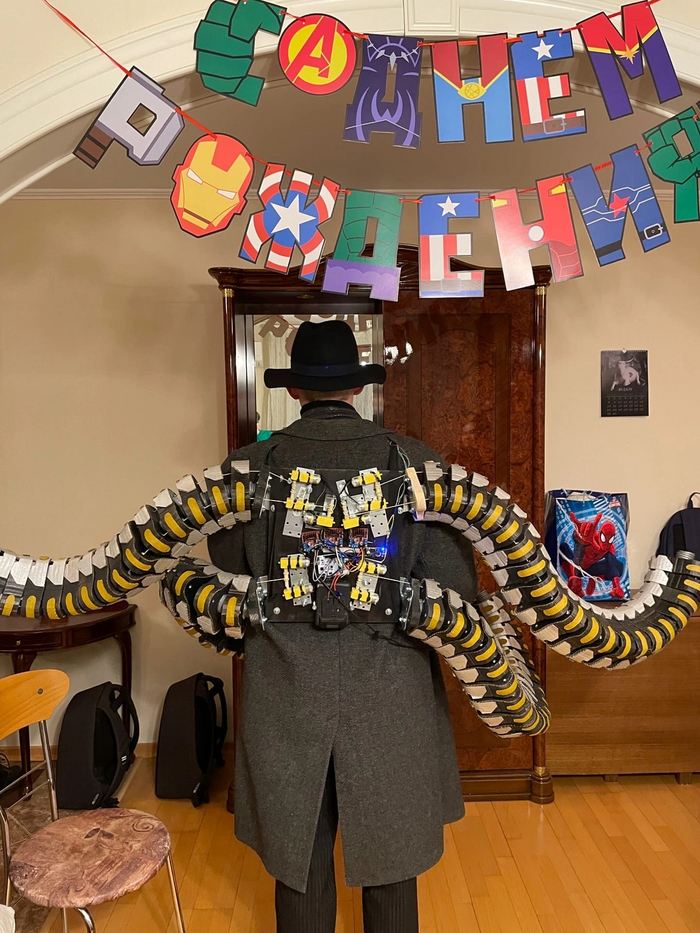
Результат всех моих стараний вы можете увидеть на фото ниже:
По итогу, хочу сказать, что получилось конечно неплохо, но далеко не идеально.
Сделал для себя выводы, что перед реализацией каких-то проектов, нужно более тщательнее и детальнее продумывать все шаги. Семь раз отмерь, один раз отрежь)
Впереди ещё предстоит много работы, доделать захватный механизм, доработать механику манипулятора, придумать интересную программу управления и ещё много всего.
Хочу так-же поблагодарить свою бабулечку, которая терпит постоянные запахи краски, летающую пыль и всевозможные звуки сверления и пиления)
Всем побольше заниматься любимым хобби!
Спасибо за внимание.