В своих предыдущих постах я описывал несколько вариантов платформ, созданных в FreeCad и изготовленных при помощи 3D принтера, а именно:
- двухколесная с дополнительными опорами,
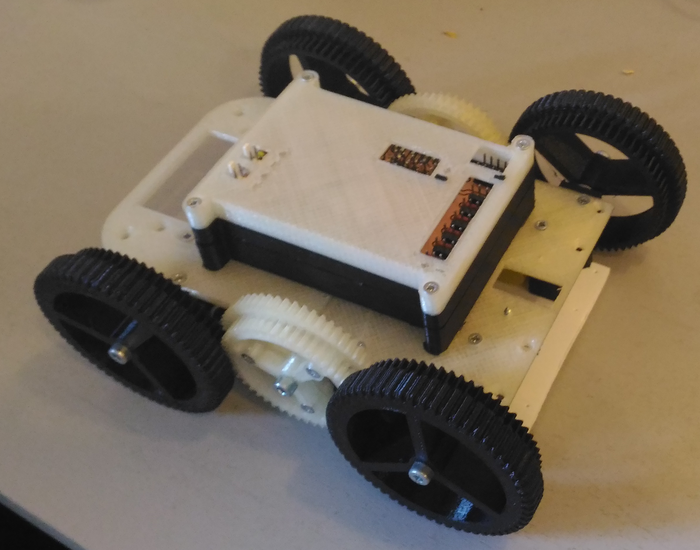
- четырехколесная с полным приводом через редуктор,
- гусеничная,
и вот теперь крайняя в этой серии платформ, созданных для изучения их достоинств и недостатков, шагающая.
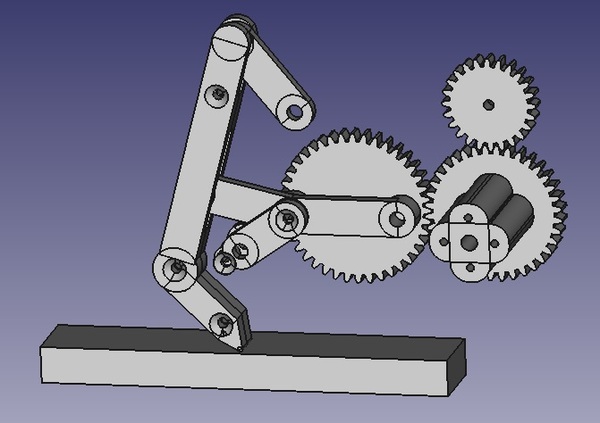
Для постройки этой платформы я выбрал принцип механизма Кланна - мне показалось, что его легче реализовать. Тем более, что в Википедии есть не только подробное описание, но и пример координат опорных точек механизма в относительных единицах. Взяв эти координаты за основу в масштабе 1=50мм, я смоделировал это в FreeCad.
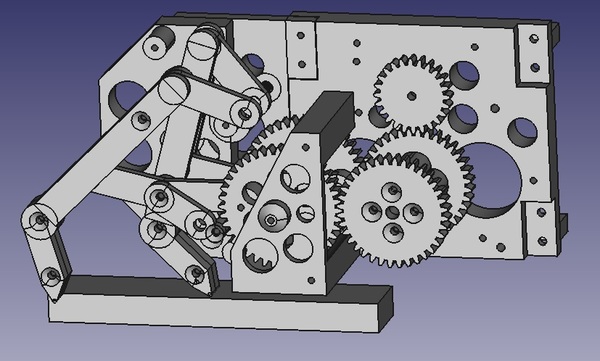
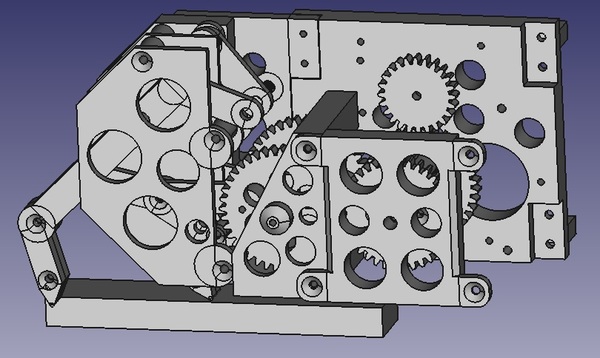
Поскольку трудно избавиться от люфтов, пришлось, чтобы ноги у платформы не заплетались на поворотах, добавить между ними детали-разделители
Сразу хотелось бы сказать, что я сделал бы по-другому, если бы еще раз проектировал такую платформу. Я бы увеличил клиренс, он тут всего 10мм.
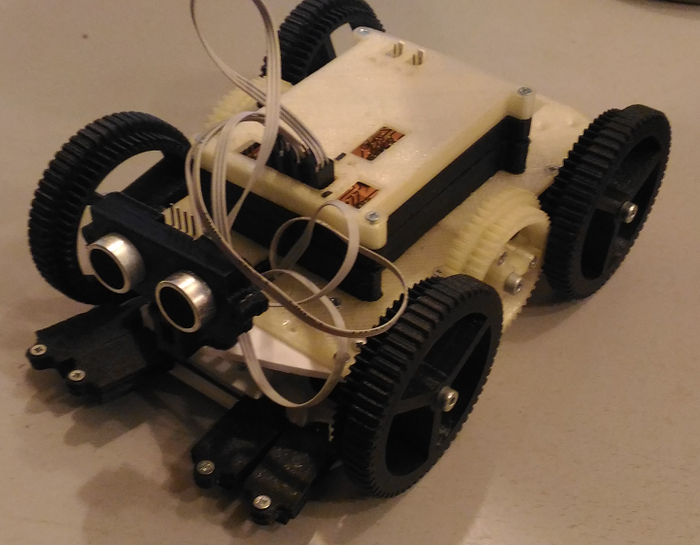
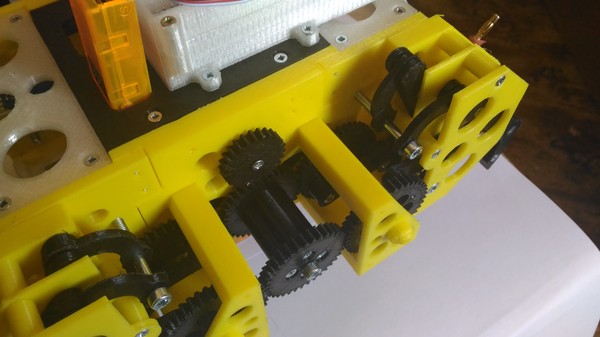
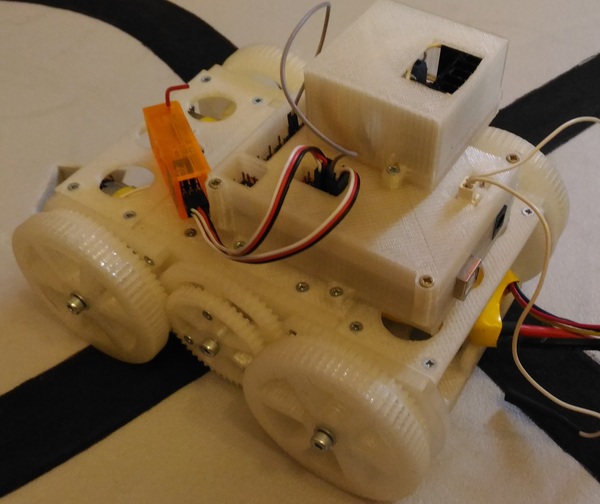
Для ходовых испытаний я воспользовался той же схемой, что и на четырехколесной платформе, а попросту взял разобрал и использовал от нее всю середину, моторы и Ардуино с шилдом. Процесс создания мне показался сложноватым, я даже начал в себе сомневаться, но оно заработало!
Как видите, бегает на своих восьми ножках.
Теперь о недостатках:
-сложность конструкции,
-"острые ножки", весь пеноплекс поганый истоптал),
- недостаточная точность поворотов, что может отрицательно сказаться на написания программ для работы в автоматическом режиме.
Положительное:
-все-таки бегает и управляется,
-экзотичный,
-смешно наблюдать, как он бегает по комнате.
Теперь подытожу. Для дальнейшего использования с разнообразными датчиками и манипуляторами в автоматическом режиме, из четырех платформ наиболее понравились двухколесная за простоту и точность управления и гусеничная, которая сложнее, но не уступает в остальном двухколесной, имея, однако, преимущество в виде повышенной проходимости (неровности площадки не являются для нее непреодолимым препятствием).