
Магнитные подшипники
Большинство из вас видели и знают как выглядит, как устроен и как работает подшипник. Когда мы говорим подшипник, обычно имеем ввиду шариковый или роликовый радиальные или упорные подшипники качения. В этот раз не они нам интересны)

Кстати, слово подшипник происходит от словосочетания «под шип».
Предлагаю рассмотреть другой тип подшипников, помимо подшипников качения, это подшипники скольжения.
Вообще подшипников скольжения существует несколько типов. Пневматические, гидравлические и самые интересные, магнитные. О них хотелось бы сегодня поговорить. Сам я недавно узнал о таких, а в живую и не видел никогда. С пневматическими и гидравлическими все понятно, в них непосредственную нагрузку от вала воспринимает тонкий слой газа или жидкости под давлением, нагнетаемые насосом.

Магнитный подшипник, очевидно, работает по принципу магнитной левитации. Различают пассивные и активные магнитные подшипники.

Пассивные появились недавно и распространены не сильно, для его работы не требуется управляющая электроника и принцип его действия основан на возникновении токов Фуко в массивном медном цилиндре, окружающем постоянный магнит. Видели опыты где мощный неодимовый магнит бросают в толстостенную полую медную трубку, он медленно падает внутри нее, под воздействием гравитации ? Как будто бы вот это оно.) Но могу ошибаться, может я что то неправильно понял.

В активных подшипниках магнитное поле создается переменными токами в обмотках сердечников. Здесь вращение вала в подшипнике происходит без физического контакта поверхностей друг с другом. Поэтому нет необходимости в смазке и отсутствует механический износ. И для подшипников это очень хорошо, т.к. повышается надежность и КПД механизма.
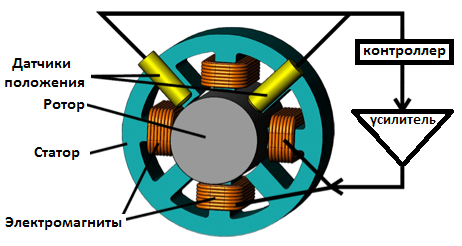
В активных магнитных подшипниках обычно присутствует датчики положения вала ротора. Они следят за положением вала ротора и подают сигналы системе автоматического управления на изменение силы магнитного поля статора с нужной стороны. И таким образом ротор центруется в статоре.

Конечно, как и везде, у магнитных подшипников есть и минусы.
Необходимость применять вспомогательные страховочные подшипники качения, для надежного удержания ротора во время остановки или в момент отказа системы удержания. Присутствует сложная система автоматического управления, где микроконтроллер получает данные с датчиков положения вала ротора и подает сигнал на изменение силы магнитного поля статора с нужной стороны. Обмотки статора греются, и им иногда требуется охлаждение, часто водяное, что усложняет и удорожает всю конструкцию. Высокая материалоемкость, потому что площадь несущей поверхности должна быть большой и сердечник статора подшипника получается большим и тяжелым. Также дороговизна в производстве и эксплуатации.