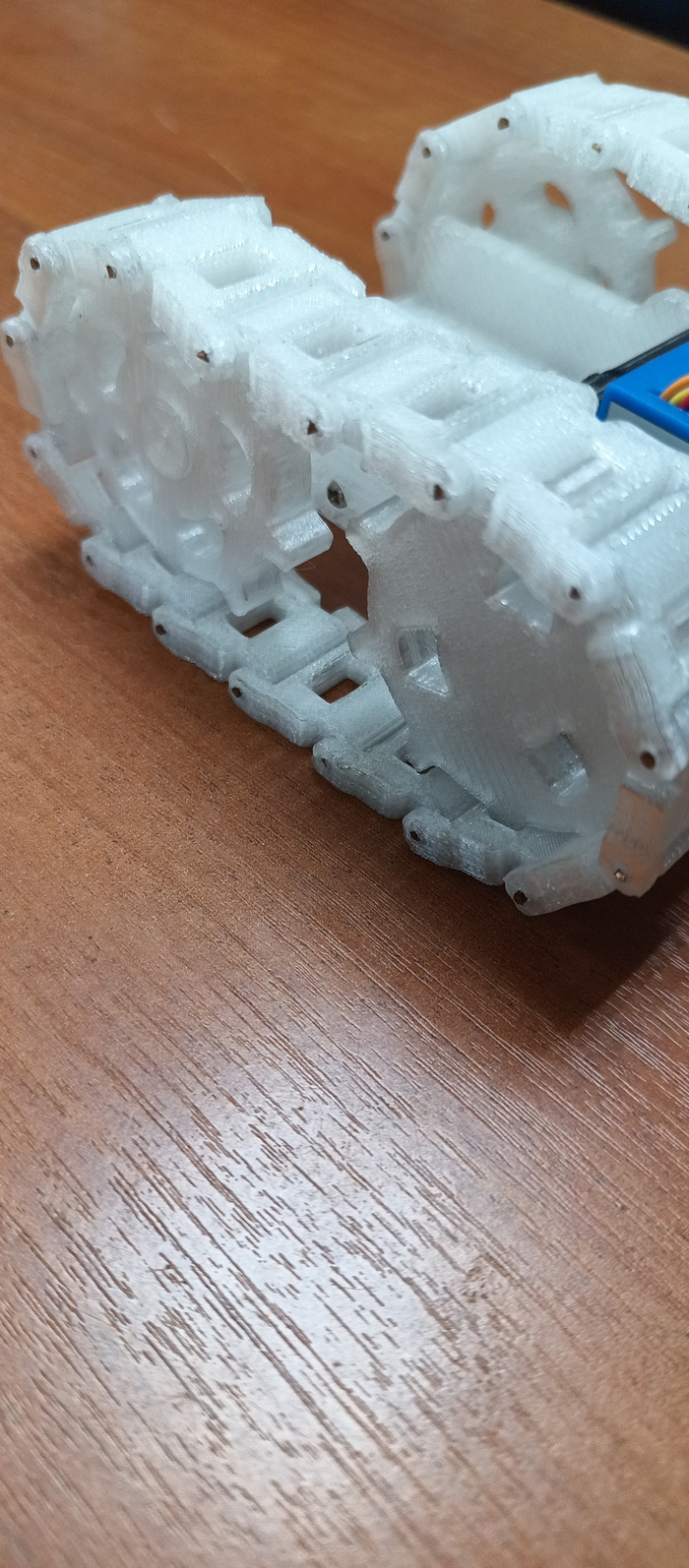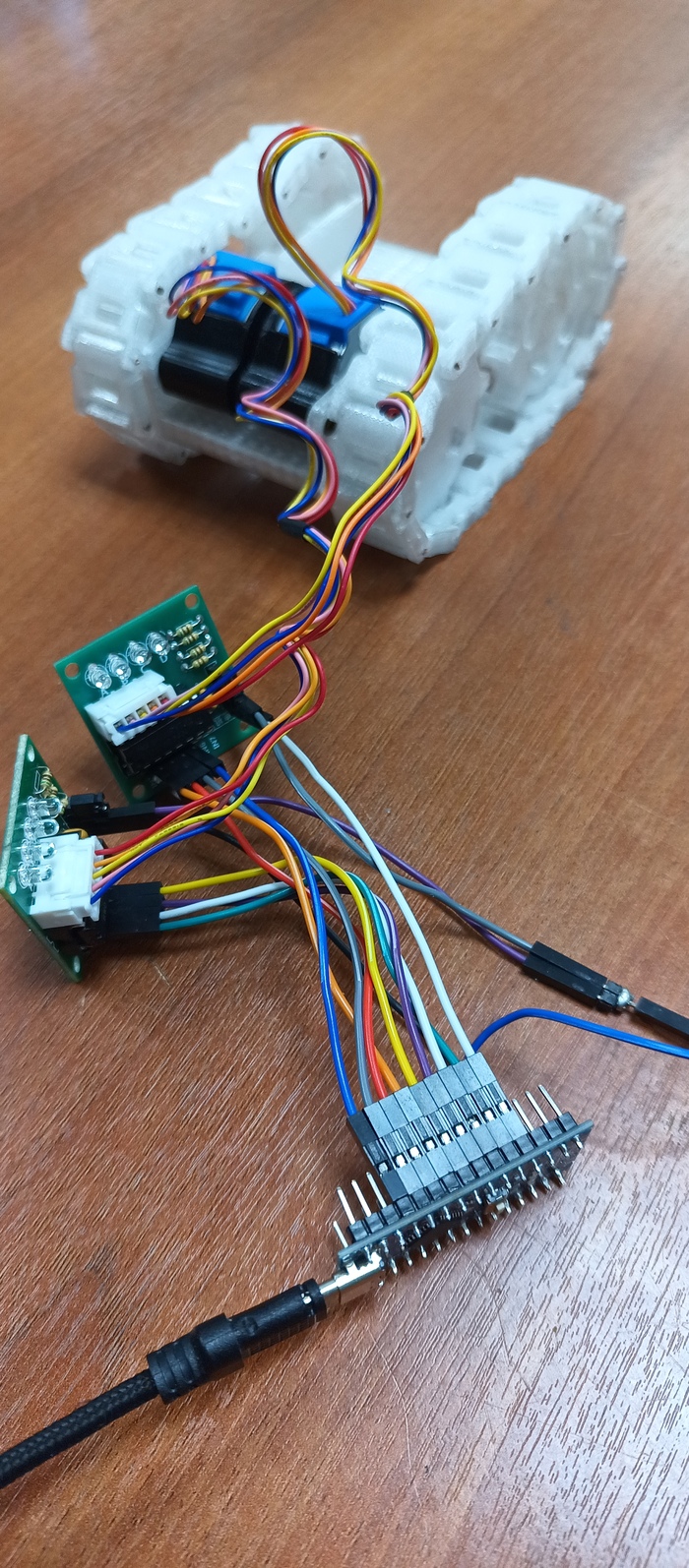
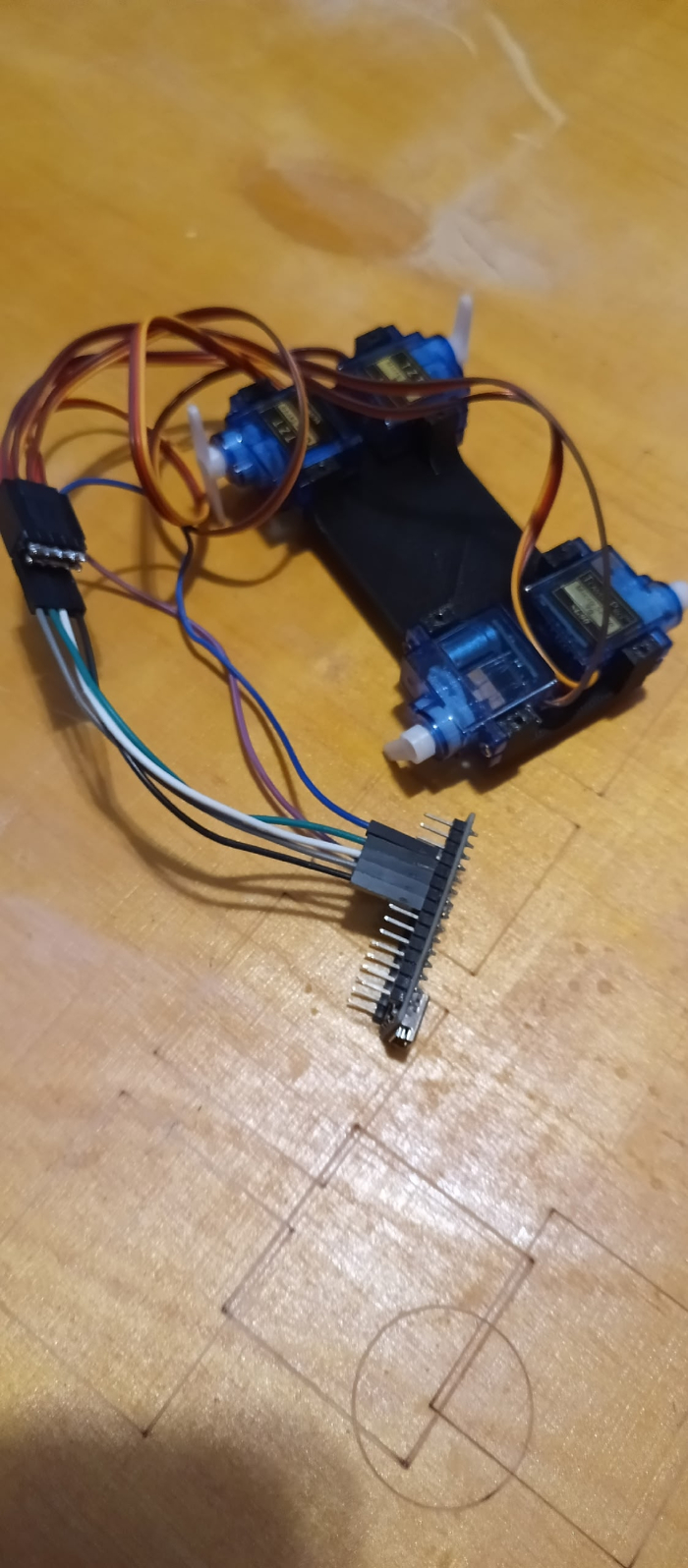
Простая платформа под установку сервоприводов SG90 для шагохода или других проектов на Arduino
Скачать модельку можно здесь:
https://3dtoday.ru/3d-models/sport-and-rest/hobby/platforma-...
Показать полностью
1
1
Скачать модельку можно здесь:
https://3dtoday.ru/3d-models/sport-and-rest/hobby/platforma-...
выяснено экспериментально.
Система 64 бит .
минимальный комфорт :
проц 4ядра по 3ггц, озу 2шт по 4гб двухканал.
1 диск под систему, 4 диска -хранилище.
сетевая карта минимум 1шт 100мбит с поддержкой linux.
видюха под текущий linux kernel .
тишина важный фактор: пк должно быть не слышно вообще с расстояния 1 метр при 100%% нагрузке.
мыш клава моник -- лишь бы работали.
флопик 3,5 желательно.
компактный размер.
без иллюминаций.
Для дома, небольшой сети до 4х компов в такой конфигурации: 3д, программирование, музыка, видео(если видяху помощнее поставить вместо офисной), планирование, сервер почты файлов сообщений ....
мате

иксвсё4
линукс с хфсе, иногда пользую mate и
конфигурация как я уже написал. оно не реактивное, но ничо не виснет, могу 20 вкладок браузера открыть, рендерить 3д. и +2 очееди копирования .

консоль без де. менеджер файлов ncdu
частоту меньше и 2 ядра, 4гб пробовал лично
на ноутбуке Ноутбук HP Compaq cq57 -- просмотр онлайн видео 1080р тормозит. обрабатывать небольшие документы, рисунки годится. NAS будет тормозить когда захочешь несколько очередей синхронизации запустить.
если кому-то интересно могут заглянуть в мой профиль, чтобы пообщаться персонально.
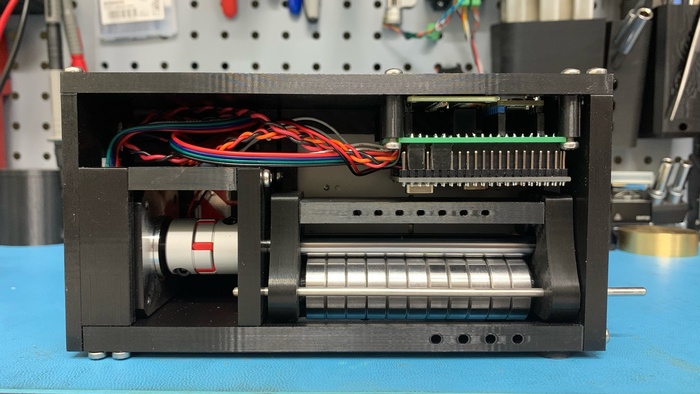
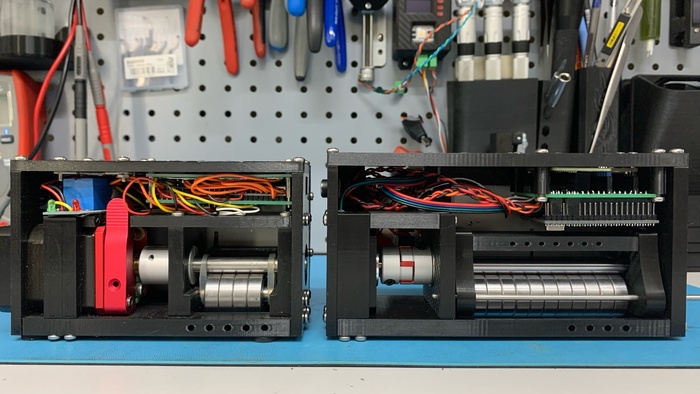
Старая версия отрезчика тут
Видосик для тех кому больше нравятся движущиеся картинки
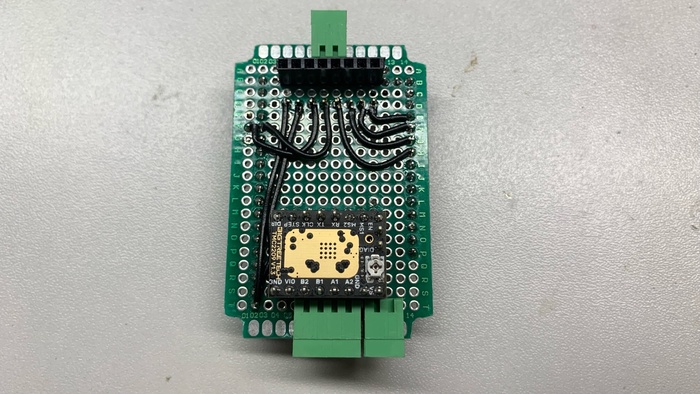
Относительно первой версии по функционалу осталось всё то же же самое. Подаётся, отрезается но теперь это происходит быстрее и качественнее. Сборка стала в разы проще благодаря разведённой и изготовленной печатной плате на которой собирается вся электроника. Плата универсальна и может подойти для других проектов.
Прототип платы
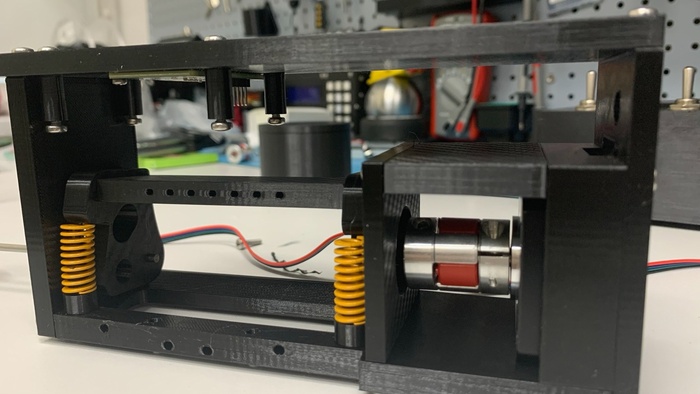
Главным отличием является механизм прижима поджимных роликов к подающему валу. Теперь его не перекашивает и термоусадка зятягивается ровно, что в свою очередь обеспечивает более перпендикулярный отрез и это очень важно.

Если отрез будет не перпендикулярным то не получится достаточно плотно прижать термоусадку к плоскости выхода контактов разъёма а это нужно для того, что бы в ходе монтажа и эксплуатации, соседние контакты, не замкнулись между собой посторонними предметами. Это могут быть кусочки токоведущих жил или шарики припоя. Ну и некрасиво будет)
Как видим на фото выше, контактов у разъёма может быть достаточно много и как правило, почти к каждому контакту нужно припаять провод а потом усадить на месте пайки термоусадку. Так же она служит защитой от сильного перегиба токоведущих жил во время монтажа разъёма. А теперь представьте, что вам нужно запаять с десяток таких вот разъёмов?)
Задача ясна.
Первая версия отработала больше года и кроме неудобства работы с ней, нареканий не вызывала.
Качель поджимных роликов качается на металлическом стержне(который сейчас некрасиво торчит вбок) и поджимается пружинами а ни как в первой версии какими-то непонятными резиновыми колечками. Благодаря этому отсутствует перекос и есть возможность регулировки усилия прижима.
Мотором отрезчика теперь управляет драйвер на 36v(в прошлой версии было реле). Питается прибор от USB Type-C через триггер на 19v(было 12v). Вообще этот отрезчик чековой ленты должен работать от 48v но нам столько мощи не требуется, пока). Кнопок управления теперь всего 4 и этого вполне достаточно. Прошивка не дописана да и направляющей для термоусадки пока нет. Прибор уже пригоден для эксплуатации.
В какой то момент времени решил я приделать кнопку управления светом. Долго искал выключатель и его не нашел. Но нашел управляемое реле, плату pro micro arduino и понеслось..)
Берем Python, Arduino IDE, реле, плату pro micro arduino, охапку дров и плов готов получаем результат:
GUI интерфейс:
Пишем на Python интерфейс посредством фреймворком customtkinter (простой и удобный).
Так же нам нужны либы serial и time.
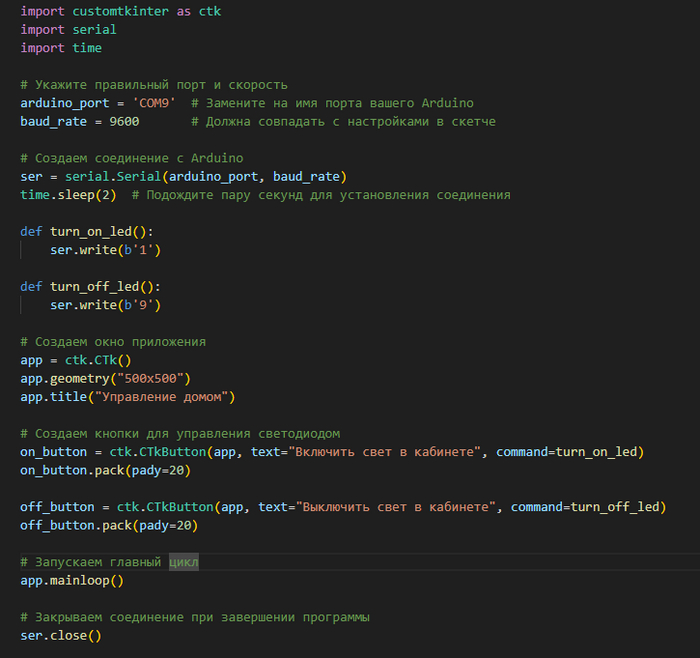
Скрипт максимально простой для удобства понимания. Можно делать сильно сложнее. Обработки занятости соединения нет
Компилируемый код для Arduino IDE:
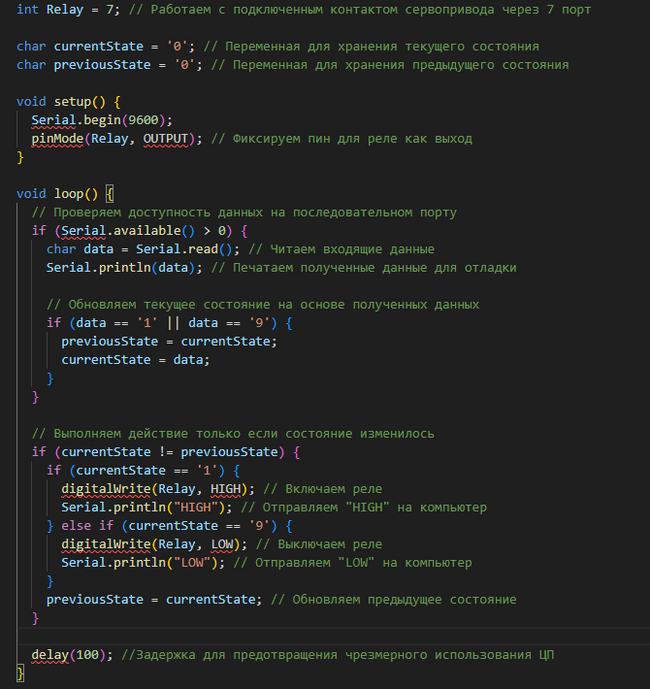
Говно код как говно код).

Управляется подключенным к компьютеру кабелем usb. У меня стационар в целом удобно.
Ну а дальше этот код и проект можно кастомизировать под что угодно. Можете управлять несколькими устройствами. Можно писать сложный код который управляет различными устройствами. В общем это интересное изобретение велосипеда которое во многом развяжет руки для вашего творчества и возможностей.
Со временем руки дойдут до переделки подставки самой лампы. И вот уже в ней нужно оставить место для реле и микросхемы.

Я достаточно ленив для того, что бы работать руками, по этому предпочитаю творить в кровати, лёжа под ноутбуком. По тем же причинам стараюсь максимально автоматизировать рутинные рабочие задачи. Пусть работают роботы...
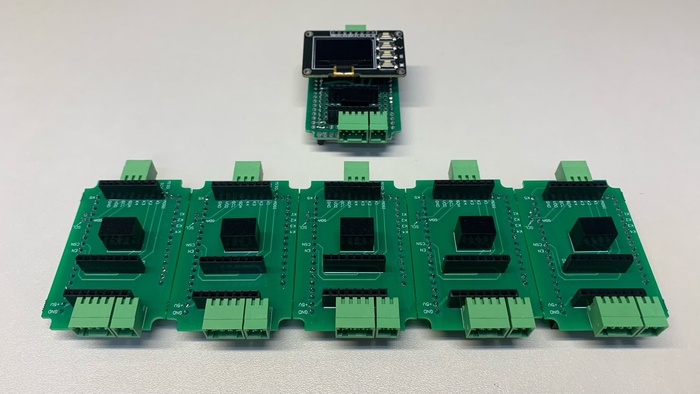
Контроллер шагового мотора и свивальник проводов

Имеется экранчик и 4 кнопки. Этого вполне достаточно для управления мотором. Можно подключить внешнюю кнопку или, как в моём случае, напольную педаль. Так как электронщик из меня так себе, коллега помогла развести плату по моему прототипу на макетной плате. Работает на Arduino mega 2560 pro.
Был у меня тут пост и о перемотчике всякого нити-подобного
Знакомая помогла нарисовать интерфейс для сенсорного экрана(да-да, я ленив)) а вот говнокодить пришлось уже самому( Неделя бессонных ночей ушла на то, что бы понять как это всё "подружить"
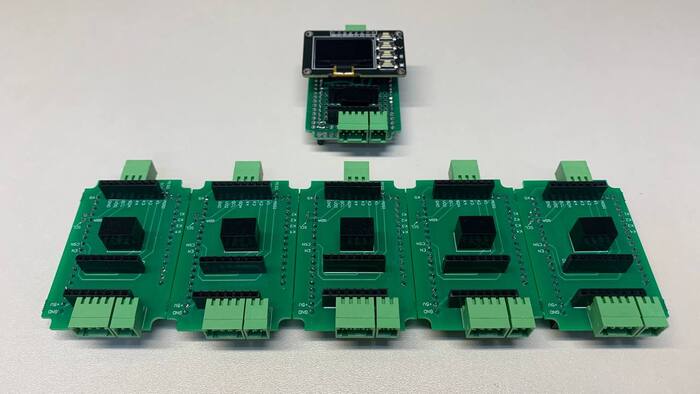
Коробка с кнопками
Иногда хочется покрутить шаговыми моторами до, во время и после сборки роботов. Понастраивать режимы, понять сколько вообще нужно кнопок в будущем проекте. Тут всё просто. 18 кнопок, 5 тумблеров, Четыре 3-х амперных драйвера, пять 6-ти амперных и 5 вентиляторов с решётками для понта для выборочного охлаждения конкретного драйвера мотора. Всё та же Arduino mega 2560 pro.


Вентилятор против вони для пайки, поклейки, плавки
Убирает неприятные запахи(от вашего лица и рабочей зоны) во время работы с мелкими деталями и равномерно распределяет их по всему объёму помещения. Выполняйте эти и подобные процедуры только в хорошо проветриваемом помещении. Конструктив позволяет встроить аккумуляторы или работать просто от розетки.


Общее фото

Бонус
А ещё - а ещё печатаю всякое на фотополимере и естественно приходится подбирать настройки для смолы. Печатать всякие тестовые кубики мне совсем не интересно...


Немного технопорно на столе)

Здоровенный кристаллический дракон в моём творческом уголке

Ну и в самом конце ещё пара хобби



Потихоньку в свободное время делаю различные устройства для авиасимуляторов. В этот раз пост про кран шасси на подобие как у Миг-29 или Ка50/52. У меня не было цели сделать копию оригинального переключателя. Но хотелось сделать нечто подобное по механике переключения и визуально близким.

В оригинале используется тумблер на который установлен механизм из нескольких деталей. Но такое сделать проблематично, поэтому при моделировании начал импровизировать.
Был спроектирован такой вот переключатель выпуска/уборки шасси. В нижнем корпусе размещаются кнопки на которые нажимает подпружиненный шток. При проектировании мне захотелось заказать 3д печать металлом. С учетом этого и была разработана 3д модель.

Пришел мой заказ с различными деталями. Тут пилотажно-посадочный индикатор ИП-52, пульт САУ, кран шасси и пульт ICP для F-16.
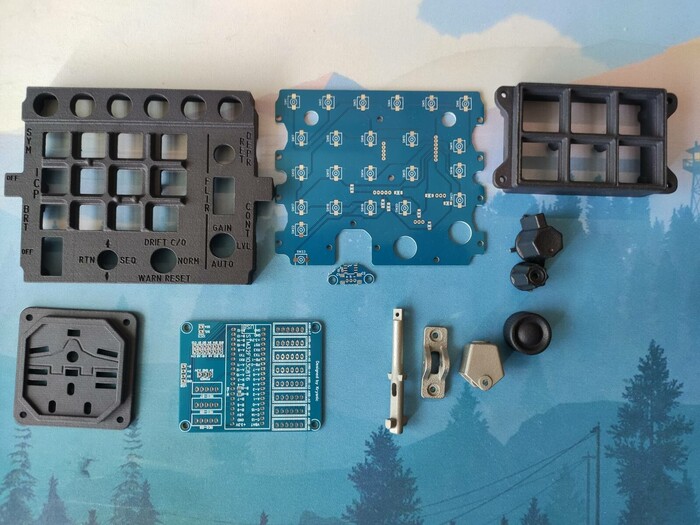
После проверки деталей, нужно было их подогнать, рассверлить отверстия, распечатать детали корпуса с кнопками.
После подгонки и сборки механической части, припаял к кнопкам провода.

Кнопки будут подключатся к контроллеру на базе STM32F103C8T6, софт FreeJoy. Еще до этого мной был разведён шильд для платы STM32. Для более удобного подключения различных органов управления.
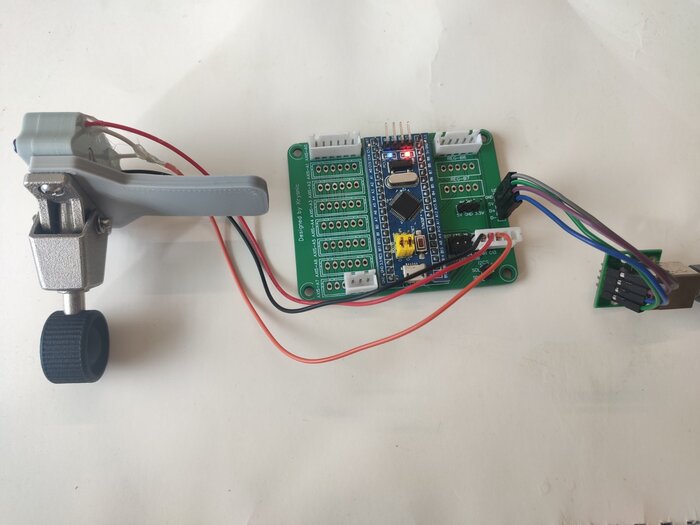
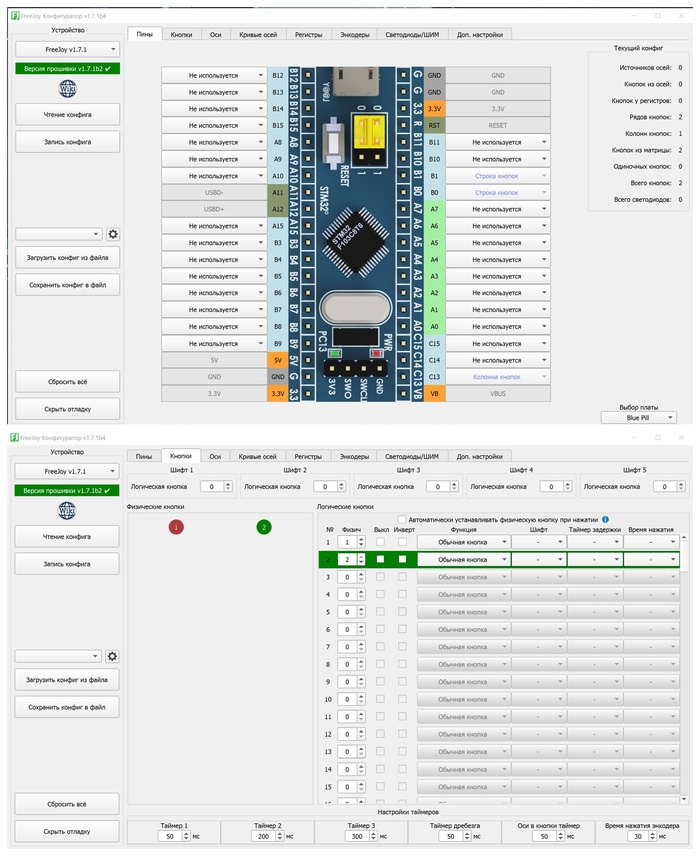
После подключения настраиваем софт. Так как у меня всего лишь две кнопки и это тест, подключаю их напрямую. Записываем настройки в память контроллера. После перезагрузки видим что нажата одна кнопка, при переключении нажимается другая. Отлично все работает.
Запускаем игру и проверяем работу крана шасси.
Посмотреть и скачать мои работы можно на форуме ДКС в моей теме
Так же сейчас проектирую джойстик для танкового симулятора, но это уже другая история.

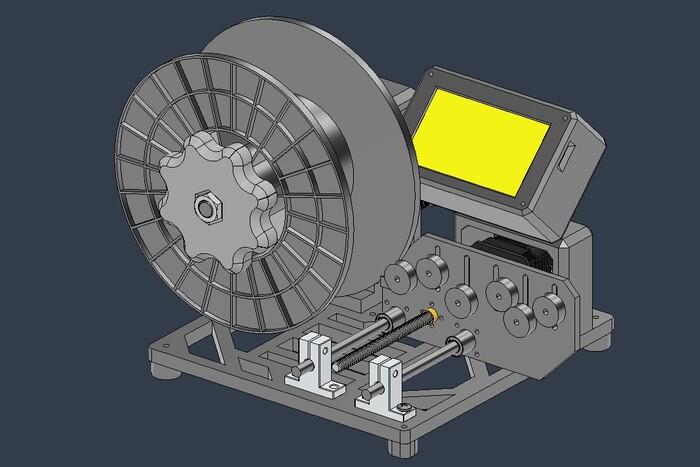

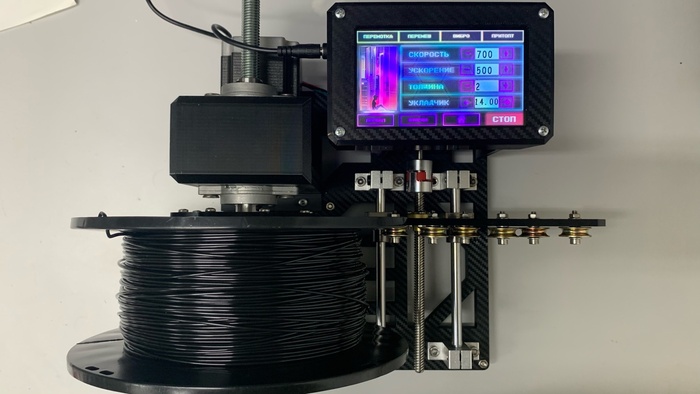
Часто работаю с проводами небольших сечений(от 0.12 до 1). Для удобства их нужно перематывать с бухты на катушки. Так же давно хотелось "раскурить" темы сенсорных дисплеев, шаговых моторов и их драйверов. После появления Bambu принтеров тема перемотки пластика тоже стала более актуальна.
В интернете множество проектов на эту тему но все они мягко говоря "не очень". Мне же хотелось универсальное устройство с возможностью перемотки различных диаметров, лёгкой его модернизации и изготовления. Я в печати уже лет пять и часто слышу мол, 3д-принтер - это игрушка и ничего кроме фигурок на нём сделать нельзя. Теперь будет, что показать неверующим.
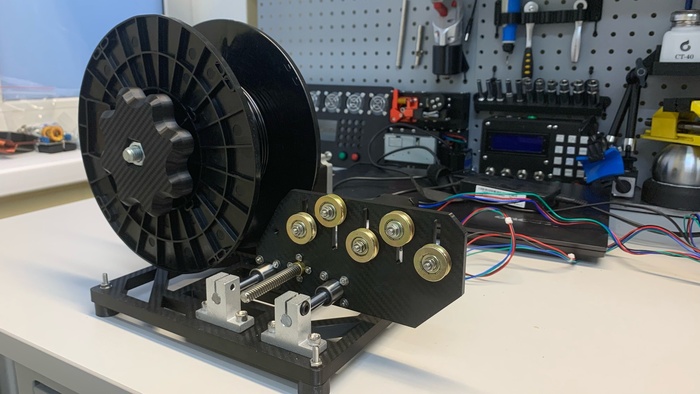
Все детали перемотчика печатаются и покупаются на всем известных сайтах в интернете. Винтики и гаечки доступны в локальных магазинах. Перемотчик имеет укладчик. В данной конфигурации шаг его ходового винта составляет 8мм. В качестве оси катушки используется самая обычная резьбовая шпилька M12. Максимальный диаметр катушки 200мм и ширина 70мм. По фото и видео будет понятно, что ось катушки можно поставить толще или короче, то же относится к параметрам и ходового винта укладчика, то есть данный перемотчик можно адаптировать под свои задачи.
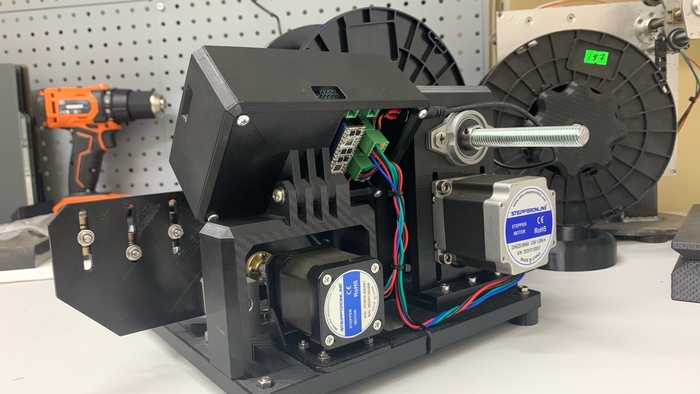
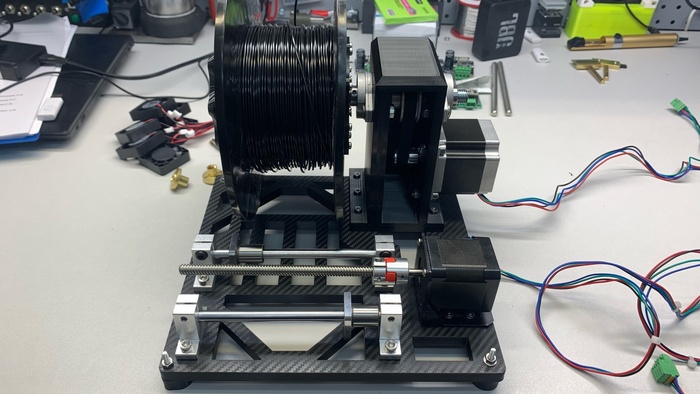
В движение всё приводится двумя шаговыми моторами nema17 и nema23 а управляется Arduino MEGA pro. Компоненты выбирались максимально доступные. Сейчас он собран и работает но его собственная электроника пока не готова, по этому работает от лабораторной коробки с кнопками, которую так же пришлось придумать и собрать для того, что бы на ней "откатать" прошивку, понять какие органы управления нужны и как вообще с ним работать
При необходимости вы можете изменить укладчик под свои задачи. В моём случае он делался лишь бы был хоть какой-то для тестов. Редукция, максимальный диаметр катушки, длина и толщина шпильки, ходовой винт - всё подлежит замене. Положение мотора катушки регулируется для подстройки под длину приводного ремня и диаметры шкивов.
Выбор сенсорного дисплея вместо кнопок обусловлен более простой сборкой нежели пайкой кучи кнопок. Так же его интерфейс проще перенастроить чем переделать конфигурацию кнопок под свои задачи. С сенсорным дисплеем количество всяких кнопок, меню, настроек не ограничено да и подключается он всего четырьмя проводами. Приёмные катушки могут использоваться разные. Они могут быть шире или уже и их "начало" и "конец" так же могут быть дальне или ближе от габаритов самой катушки. Для всего этого и нужен сенсорный дисплей, где бы мы могли задать начало наших координат, ширину катушки, диаметр укладываемого тела и прочие параметры вроде скорости переметки.
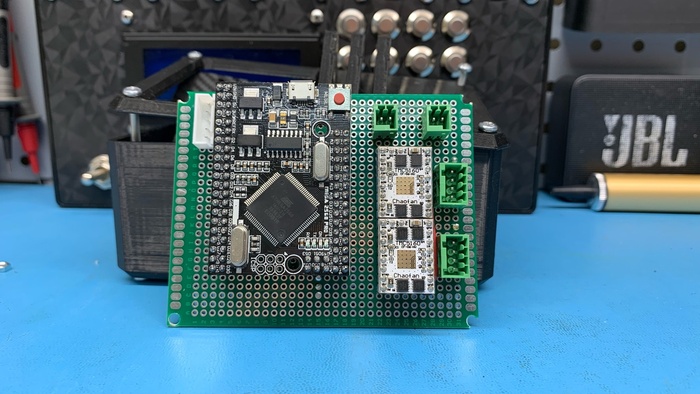
У платы управления остаётся много свободных ног к которым можно будет по необходимости подключить различные датчики. Например датчик окончания, натяжения, энкодер для измерения длины, выносные кнопки или педаль. Перемотчик в основании имеет РЕЗИНОВЫЕ НОЖКИ! Это гасит вибрации, снижет шум при эксплуатации и предотвращает его самопроизвольное перемещение по столу во время работы. У перемотчика нет концевиков. Вместо этого используются драйвера в которых есть технология stallGuard 2 позволяющая им определять когда мотор упёрся в препятствие. Но как говорилось выше, Вы можете добавить концевики по своему усмотрению так же как и поменять всю электронику на более удобную для Вас. Вроде это всё, что хотелось сказать.
Рассыпуха:
x2 Linear bearing LMK8UU 8mm
x2 Bearing pillow block mounted support KFL001 12mm
x2 Linear shaft 8mm. Length 150mm
x1 Lead Screw Lead 8mm and nut. Length 150mm
x1 Motor guide shaft coupler connector. Bore12mm
x4 SK8. Linear bearing rail shaft support 8mm
1x Flexible jaw coupling 5x8mm
x1 GT2 belt 200mm
x1 Pulley 30T B6.35
x1 Pulley 60T B12
x1 Nema 23 Stepper Motor(2.8A 57x56mm). 6.35mm Shaft
x1 Nema 17 Stepper Motor
x1 Stepping Stepper Motor Nema17 Holder
U-type bearing bore 4mm, R 1-2.5
x1 Arduino mega pro
x1 DWIN 4,3 DMG48270C043_04W
x2 TMC5160-HV
Дальше фото и видео.
Пост пока ознакомительный. Чертежи требуют проверки и возможно каких-то изменений. Запилю второй пост с работой устройства и там всё будет.
Ещё один девайс для работы с проводами. Тут хотелось попробовать сделать быстроразъёмное соединение и проверить будет ли оно нормально работать