
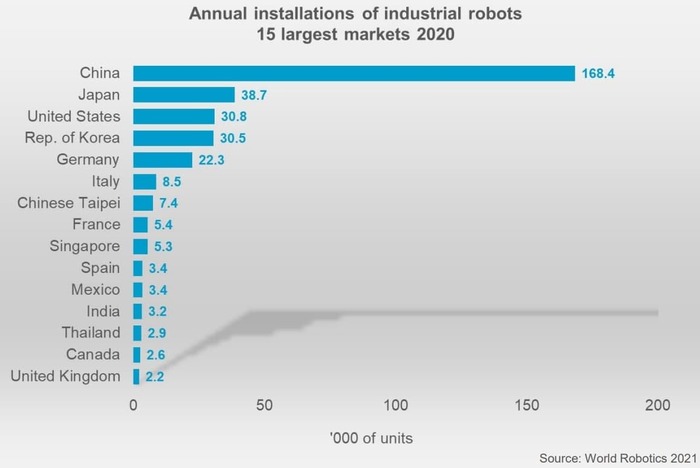
Мировой рынок промышленных роботов
Топ-15 стран по закупкам в 2020 г.
Топ-15 стран по количеству на 10 тыс. человек

Показать полностью
1
Топ-15 стран по закупкам в 2020 г.
Топ-15 стран по количеству на 10 тыс. человек
видео рассказывает о странных местах для стрима также про двухголовых черепах каймановых и про производство роботов Китай технологии
Успейте до 1 апреля скачать свои coub-ы. Кто не знал, платфома будет закрыта.
Началось все как всегда с чертежа.
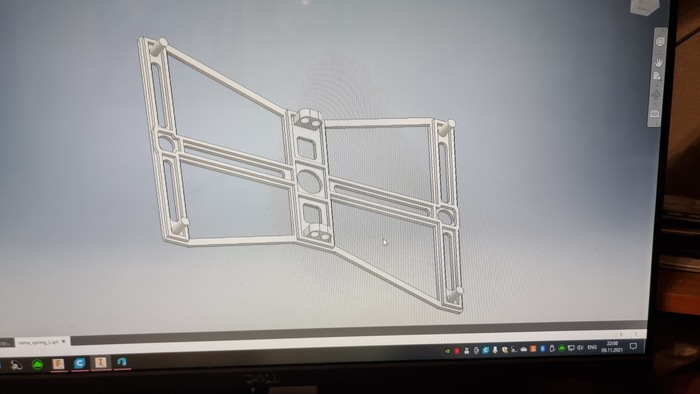
План был сделать максимально легкую раму, но при этом не переборщить. Легкую - просто ради экономии времени и материала. Иии в итоге я таки перестарался...

Чуть чуть поправим ситуацию, нарастим ребра и дополнительные распорки, и жесткость приходит в норму.
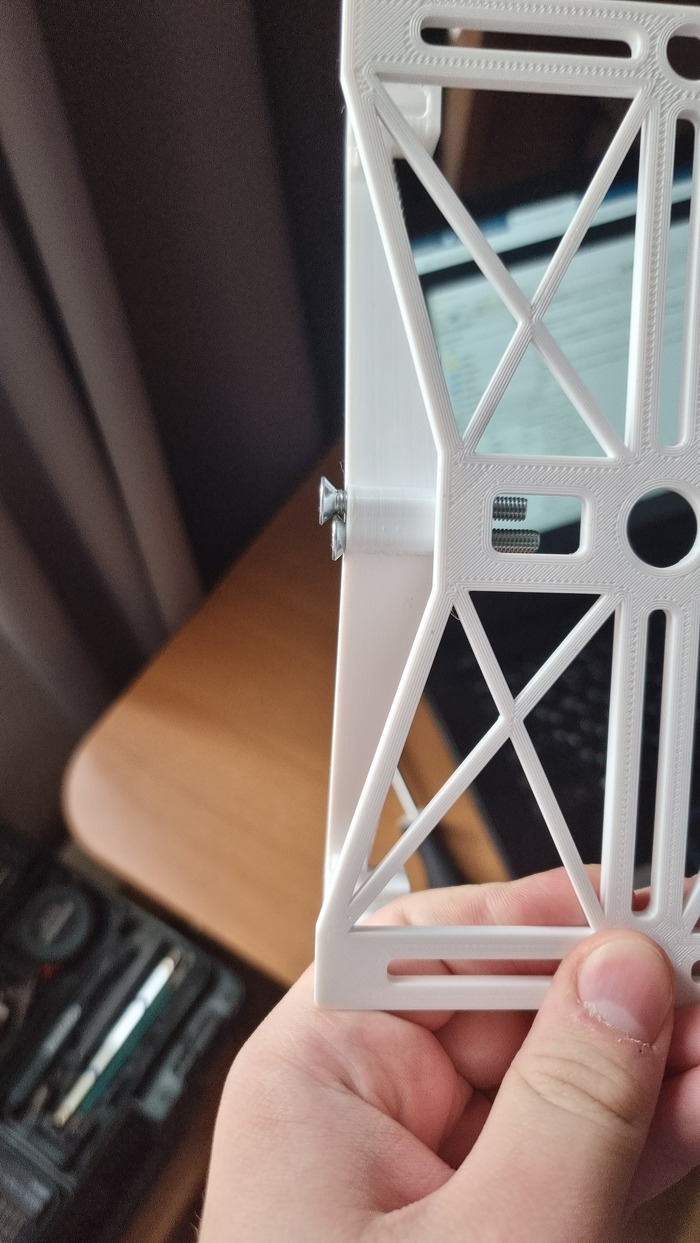
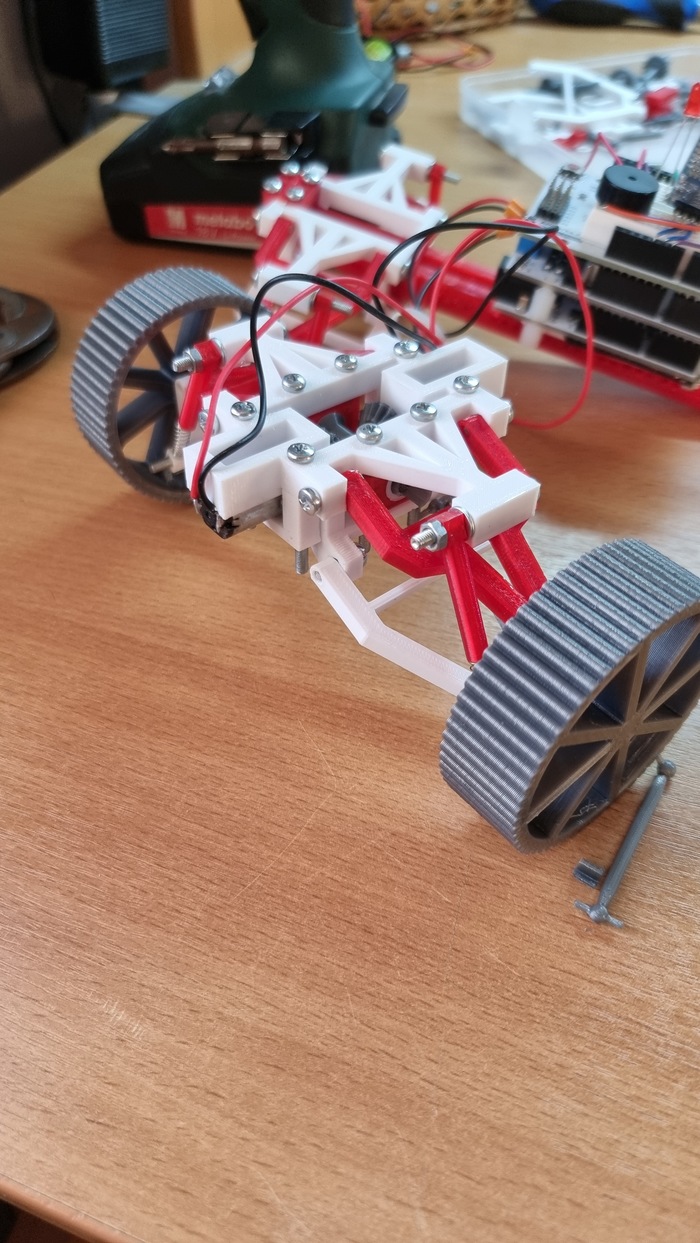
Тип подвески здесь - по факту, рессорная, но с подвыподвертом. В качестве рессоры выступает сам рычаг, на котором висит колесо, и вдобавок усиленно пружинами. Пружины тоже печатаные, пришлось заморочиться, чтобы сделать их адекватными, а потом еще и распечатать. Ни о какой аналогии металлическим собратьям конечно нет, но прикола ради можно и пружинки печатнуть.
На видео видно, что пружины немного выгибает в процессе работы, но если их правильно позиционировать, то этот эффект пропадает.
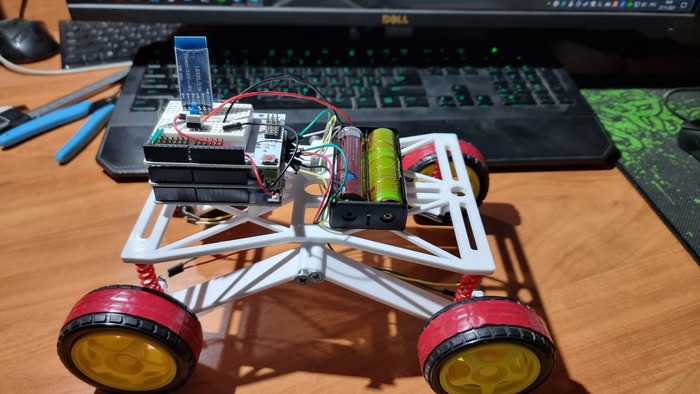
На рычаги-рессоры крепим моторы, к которым напрямую вешаются колеса. Знакомый уже бутерброд электроники, описанный во второй части.
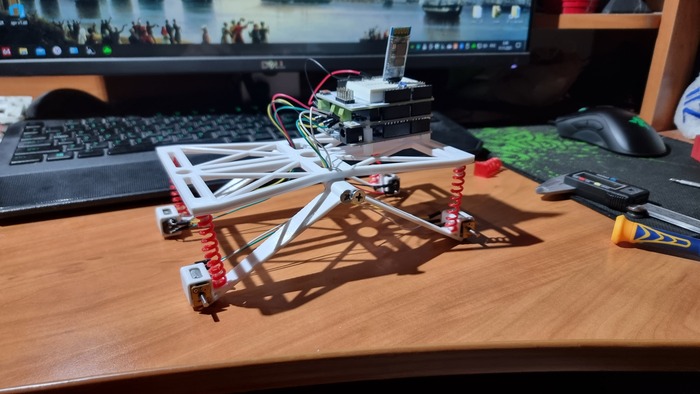
Ну и собственно все. Батарейный блок для питания, и в бой.

К сожалению, не могу снять как оно ездит, ведь управление идет с телефона. Но поверьте, для своих трудозатрат ездит он вполне себе. Простая схема, без заморочек, кучи деталей и расчетов. Даже как то скучно. А вот еще пример работы фар, которые позже были установлены на "мозги"


Как игрушка на поиграть - прекрасно, но мне показалось, что как то простовато... К чему это привело, можете прочитать в других частях)

18 лет назад, 13 марта 2004 года, в американской пустыне Мохаве произошло знаменательное событие: там состоялась первая в истории гонка автомобилей-роботов. В тот день все участвовавшие в соревновании беспилотные машины сошли с дистанции. Но на этом история «робогонок» отнюдь не закончилась, скорее наоборот — только началась.
Конечно, в 2004 году беспилотные автомобили еще считались экзотикой, и именно дальнейшее развитие этой технологии стало основной целью соревнований. Гонка, получившая название «DARPA Grand Challenge», была организована Управлением перспективных исследований Министерства обороны США (DARPA), тем самым, благодаря которому несколькими десятилетиями ранее на свет появился интернет. Эта организация финансирует различные научные проекты, исследования которых можно использовать для производства вооружений. В сферу интересов DARPA традиционно входят аэрокосмические и компьютерные технологии, биомедицинские изыскания, электроника, и, конечно же, робототехника.
Призовой фонд первой в истории гонки DARPA Grand Challenge был весьма внушительным: миллион долларов, но и объявленные правила оказались непростыми. Дистанция составляла 150 миль (240 км): старт располагался неподалеку от калифорнийского городка Барстоу, а финиш — возле населенного пункта Примм на границе с соседней Невадой. Трасса пролегала не только по дорогам с твердым асфальтовым покрытием, но также включала в себя участки пересеченной местности, проселки, овраги, лужи со стоячей водой, туннели и канавы. При этом точный маршрут был неизвестен практически до самого последнего момента: его объявляли участникам лишь за два часа до старта.
На модель и габаритные размеры автомобилей каких-либо жестких ограничений не накладывалось, главное — чтобы живой человек никак не участвовал в управлении транспортным средством. Также категорически запрещалось сталкиваться с другими автомобилями и наносить повреждения окружающей среде.

На старт первой в истории робогонки заявилось 15 команд, в основном, организованных студентами, аспирантами и преподавателями ведущих американских университетов — каждая построила по одному беспилотному автомобилю. Все робомобили прошли предварительную квалификацию — они должны были проехать милю по D-образному овалу California Motor Speedway в Фонтане. Семь машин полностью преодолели эту скромную дистанцию, в то время как оставшиеся восемь с поставленной задачей не справились, но, тем не менее, их создатели смогли убедить отборочную комиссию в том, что машины способны передвигаться в автономном режиме, потому все претенденты были допущены к соревнованиям.
Однако начать гонку сумели лишь 8 машин, да и те не смогли проехать больше 11 километров: большая часть автомобилей сломалась еще до начала мероприятия, а один перевернулся прямо на старте. Самую маленькую дистанцию, чуть менее 2 километров, проехал автомобиль № 20 команды TerraMax: на его пути встретилось непреодолимое препятствие в виде куста шалфея. Объехать преграду машина не сумела, включила заднюю передачу и застряла в текстурах пейзаже, после чего гонка для нее закончилась. Чуть больший километраж преодолела машина № 5 команды Caltech: сбившись с пути через 2,5 километра, она протаранила забор и остановилась из-за полученных повреждений.

Автомобиль №9 команды Golem Group оставил позади дистанцию в 8,5 км, прежде чем попытался заехать на холм, где и застрял. Машина буксовала на месте около 50 минут, после чего команда все-таки сдалась и вывела ее из гонки. Робомобиль №7 команды DAD (Digital Auto Drive) безнадежно повис брюхом на скалах, проехав 9,5 км. Чуть большее расстояние, 10,8 км, преодолел автомобиль, совместно построенный командами SciAutonics и ElbitSystems — затем он скатился с насыпи и заглох. Через три часа после начала гонки, которая должна была длиться десять часов, на ходу осталось только 4 машины — всех остальных настигли проблемы с навигацией, двигателем, автоматическим рулевым управлением и тормозами.

Самое большое расстояние среди всех участников проехал HUMMER H1 под названием «Песчаная буря» (SandStorm), построенный командой RedTeam из университета Карнеги Меллона — 7,4 мили (11,9 км). Попутно машина поставила рекорд скорости в этой гонке — 65 км/ч. К сожалению, в итоге этот последний участник DARPA Grand Challenge сбился с курса, попытался выполнить крутой вираж и перевернулся. Приз в миллион долларов в итоге не достался никому. Несмотря на это, гонку в целом признали удачной: по крайней мере, она продемонстрировала саму возможность соревнования беспилотных автомобилей на открытой местности. Заместитель руководителя программы DARPA Grand Challenge Том Страт тогда заявил: «машины некоторых участников могли точно следовать по маршруту с использованием GPS-навигации, но испытывали серьезные проблемы с обнаружением препятствий. Другие наоборот, хорошо обнаруживали препятствия, но не могли объехать их. Третьи вовсе пугались собственной тени, воспринимая ее как препятствие…».
Специалисты по робототехнике полагали, что для успешного прохождения полной дистанции гонки создателям робокаров понадобится как минимум несколько лет, но приз в два миллиона долларов (включавший себя миллион, не разыгранный в первой гонке) нашел своего обладателя уже в 2005-м году. В этот раз заявки подали уже 195 участников, которых ждал строгий предварительный отбор. До полуфинала дошли лишь 43 команды, а к старту были допущены 22 из них, представившие 23 автомобиля-робота. Гонка состоялась в пустыне Мохаве 8 октября на дистанции 211,8 км по пересеченной местности. Главный приз выиграла машина команды Stanford Racing Team из Стэнфордского университета, две оставшиеся ступеньки подиума занял прошлогодний лидер Red Team: перевернувшийся годом ранее SandStorm приехал к финишу вторым, а еще один автономный «Хаммер» этой команды занял третье место.

С тех пор робогонки — причем не только под эгидой DARPA — cтали проводиться регулярно. В 2007 году полностью автономные машины гонялись по улицам «города», специально построенного для этого мероприятия на заброшенной авиабазе ВВС США в южной Калифорнии. Городская трасса имела протяженность 96 километров (60 миль), ее нужно было пройти менее чем за 6 часов, соблюдая все правила дорожного движения. Главный приз — 2 миллиона долларов — выиграла команда Tartan Racing на автомобиле Chevy Tahoe, второе место с призом в миллион досталось уже знакомым нам прошлогодним триумфаторам из Stanford Racing Team, которые выставили на соревнования полностью автоматизированный Volkswagen Passat 2006 года выпуска.
С 2012 года робогонки проводятся ежегодно, причем не только в США, но и в других странах мира, и интерес к ним неуклонно растет. В 2015 году появилась серия Roborace — класс беспилотных автогонок, заезды которых проходят в рамках этапов электрической Формулы Е. Правда, пока еще эти заезды больше похожи на шоу, чем на настоящие соревнования. Помимо развлекательного, гонки роботов имеют ещё и огромное научное значение: ведь применяемые во время соревнований технологии теперь используются и в автопилотах серийных автомобилей, и в программном обеспечении аппаратов, исследующих поверхность Марса. Кто знает: возможно, в не столь отдалённом будущем на свете появится полностью роботизированная гоночная серия, столь же популярная, как современная Формула-1.
Подпишись, чтобы не пропустить новые интересные посты!
Для всех поклонников футбола Hisense подготовил крутой конкурс в соцсетях. Попытайте удачу, чтобы получить классный мерч и технику от глобального партнера чемпионата.
А если не любите полагаться на случай и сразу отправляетесь за техникой Hisense, не прячьте далеко чек. Загрузите на сайт и получите подписку на Wink на 3 месяца в подарок.

Реклама ООО «Горенье БТ», ИНН: 7704722037
Первая часть
Вторая часть
Если серьезно, то я не знаю, зачем выкладываю эту часть. Она абсолютно бесполезна, ведь скорее всего проект дальше продолжиться с предыдущей части. Но кто мне запретит)
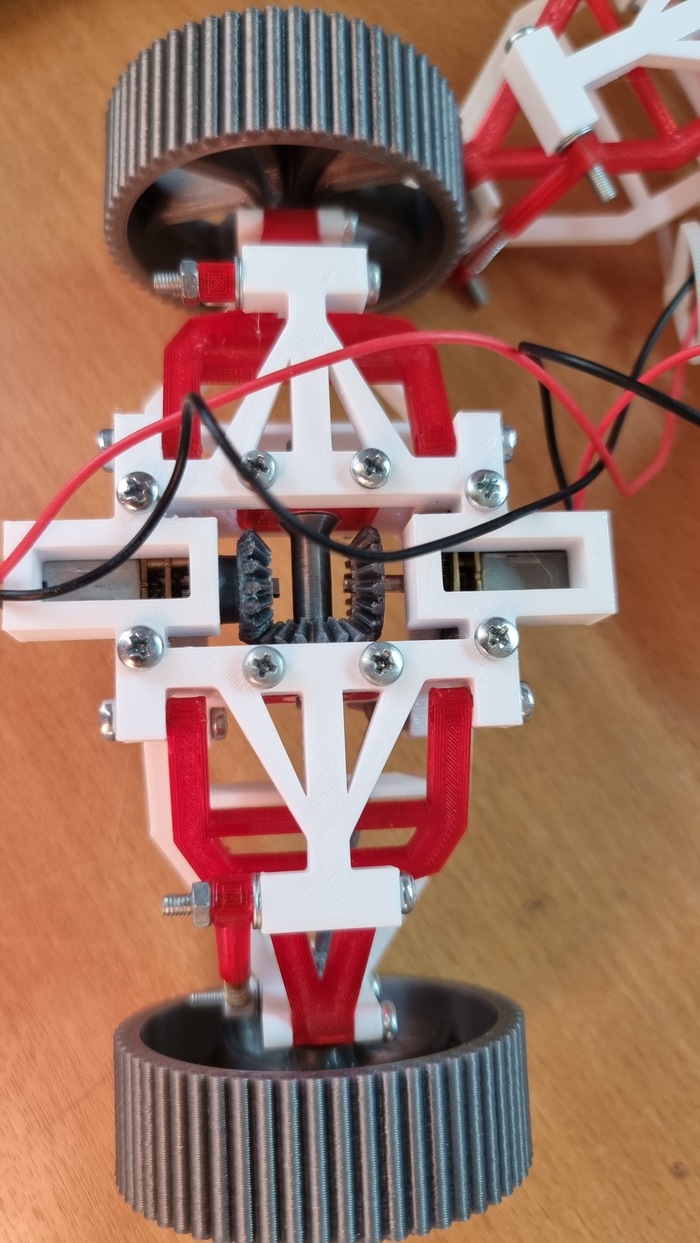
В общем, мысль была следующая - убрать двигатели от консольного крепления на ступицах куда нибудь наверх - для уменьшения неподрессоренной массы, да и так технологичнее.
Изначальный план был серьезным - были даже мысли насчет дифференциала. Но подумав и прикинув, мы решили(я и принтер) что упихать подобную конструкцию в наш масштаб практически нереально.
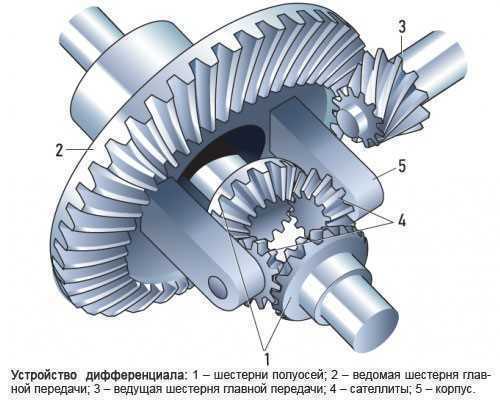
Поэтому остановимся просто на угловом редукторе.
Inventor позволяет проектировать зубчатые передачи, поэтому просто накидываем необходимые параметры, подбираем габариты чтобы все впихать и получаем пару шестерней.
Потом раскидываем сборку, шестерни одинаковые так что пофиг, какую открывать, и превращаем одну из них в приводной вал.

А в другой просто делаем посадку на вал мотора.
Лезем в общую сборку, изобретаем место под мотор на подрамнике(в первой версии мотор был один, потом добавился и второй), крепление мотора, крепление приводного вала - через втулки, для лучшего вращения, втулки в свою очередь в разрезной оправке. Новые ступицы, под вращающийся вал, сам вал колес, который крепится стопорным кольцом.
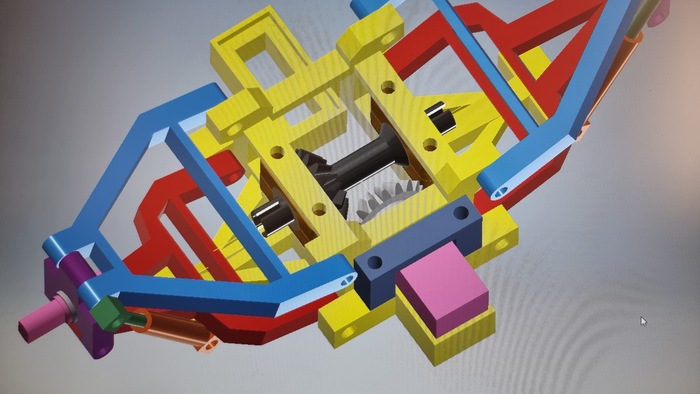
Отдельное развлечение - это привода, но о них позже.
Запускаем печать, в этот раз много проблем и ошибок, особенно с приводами, чтобы заставить это работать... Опять тонны деталек для бога деталек.

А вот тут мы можем видеть стайку подрамников, пришедших на водопой.

В общем, с горем пополам, получаем первый рабочий прототип. Я даже видео записал, по просьбам трудящихся!
Ну и пошло поехало дальнейшее исправление проблем - привода нужны толще, в верхнем положении иногда закусывает... И так далее. Попутно выясняется, что один моторчик ну совсе не тянет, поэтому появляется второй, ну и в итоге на свет явилось сие чудо.
Попутно зачем то сделал печатные колеса, но они оказались так себе, надо чем то имитировать покрышку, иначе сцепление нема. Ну и по лежащему рядом приводу на первом фото можно понять, что все равно оно ни черта не работает. Привода слишком тонкие, как бы я не пытался их увеличить, их либо сворачивает в спираль, либо обламывает. А в последней итерации, обломало шаровое соединение на приводном валу.
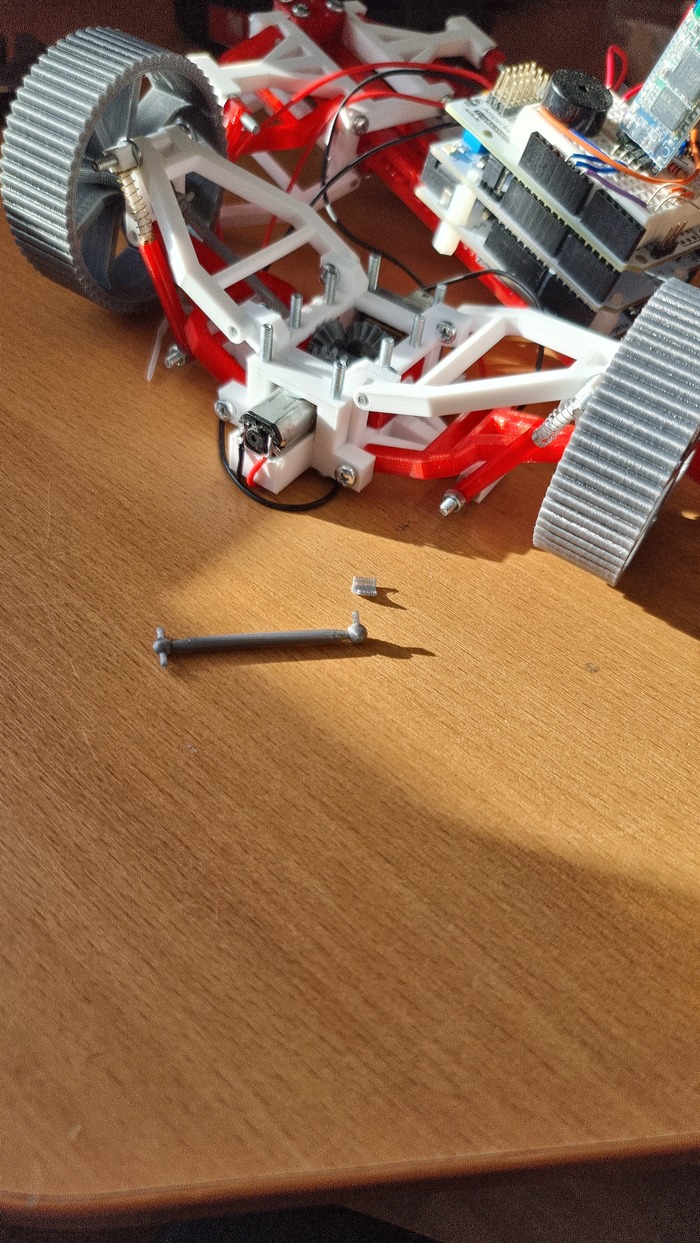
Все тупо упирается в масштаб - слишком тонкими выходят привода, слишком мелкие шаровые соединения и так далее. Вот еще фотка в сборе, просто так.

Резюме следующее - скорее всего, я вернусь к расположению моторов на ступицах, только доработаю схему, чтобы исключить люфты и прочие дефекты. Если будет здравая мысль, как все таки сделать нормальный привод - может быть вернусь к этому. А еще в планах есть рулевое управление, ууу...







