Стенобот поехал по стене!
Стенобот поехал по стене впервые.
Из-за недостаточного сцепления верхних колёс робота со стеной, происходит его уход вбок.
Необходимо сместить центр тяжести ближе к стене, над этой проблемой я уже работаю...
Стенобот поехал по стене впервые.
Из-за недостаточного сцепления верхних колёс робота со стеной, происходит его уход вбок.
Необходимо сместить центр тяжести ближе к стене, над этой проблемой я уже работаю...
Роботы повсюду, они проникли во многие сферы деятельности. Это неудивительно – весь мир сейчас взял курс на автоматизацию процессов, согласно программе «Индустрия 4.0». Роботов можно увидеть в качестве автономных средств пожаротушения; на складах, послушно перетягивающих грузы; на тротуарах, везущих к вам обед или посылку.

Многие из этих работ просто невозможны без отлаженной системы навигации и ориентации в пространстве. При этом, можно однозначно сказать, что данная задача существенно отличается, в зависимости от того, в помещении ли находится место действия робота.
Если говорить о промышленных объектах, то можно заметить, что здесь наблюдается упрощение задачи. В этом случае, можно разместить некоторое количество маяков, по которым транспортное средство может ориентироваться. Это могут быть светоотражающие метки, линии, разметки на полу, а также магниты. Еще одним элегантным решением, которое может помочь в вопросах перемещения в пространстве транспортного робота является кабель, который вмонтирован в пол здания. Это может решить еще одну проблему – не только помочь сориентироваться роботу, но и подать на него заряд с помощью электромагнитной индукции (рис 1).
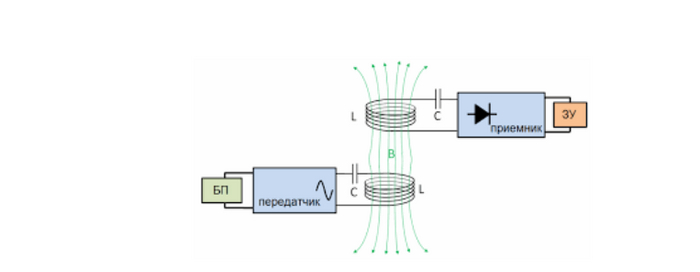
Рис. 1. Принцип беспроводной зарядки.
В частности, подобные системы применяются на заводах и некоторых складах в Германии. Такое решение увеличивает автономность системы в пределах помещения, так как ее маршрут можно проложить таким образом, чтобы его большой отрезок проходил вдоль силового кабеля в течении времени, достаточной для подзарядки.
В условиях помещения роботу часто не нужно знать свое точное положение относительно общего пространства, так как его работа ограничена рамками стен. То есть, глобальные координаты не требуются, нужно только положение прочих объектов, которые находятся в помещении, так как они могут являться препятствиями и помешать выполнению возложенной на робота задачи.
Хуже того, часть препятствий может изменять свое положение. Здесь и передвижение людей, и каких-либо транспортных средств, а также появление новых предметов в отсутствии робота или же в процессе прохождения им маршрута.
Наличие динамической среды существенно осложняет процессы навигации, здесь недостаточно единожды загрузить карту и позволить роботу работать по ней, так как это может привести к помехам в выполнении задания или даже несчастному случаю. По этой причине на технику приходится устанавливать дополнительное оборудование, которое могло бы эффективно распознавать препятствия, возникающие на пути, а также обучать ее находить максимально удобный способ обхода препятствия.
И здесь, опять же, нет единого подхода к решению этой проблемы – в одном случае она упрощается, когда препятствие статично. В другом случае, когда помеха не статична, сложность вычислений существенно возрастает по причине необходимости просчитывать все возможные пути передвижения помехи. Данная задача усложняется, так что часть алгоритмов предполагает решение этой проблемы следующим образом – замереть и ждать, пока препятствие само покинет поле деятельности.
По этому механизму работают, в частности, транспортные роботы на автозаводах, которые в случае с обнаружением на своем пути движение становятся на месте и издают звуковой сигнал, чтобы помеха быстрее ушла с предполагаемого маршрута. В ином случае, на базе анализа отрезка пути объекта двигающегося в поле зрения, система просчитывает возможные варианты и старается под них подстроиться.
В помещении данная задача не так критична, но вне его, когда остановка часто может создать дополнительную угрозу для прочих перемещающихся объектов, она стоит довольно остро и часто является одним из краеугольных камней навигации автопилотов и помощников водителя с разной степенью автономности. Здесь и большая скорость объектов, и их хаотичность ввиду их количества. Проблемы весьма существенны, так как прочие участники движения могут сами создать опасную ситуацию, с вовлечением автономного устройства.
И тут проблема навигации может принять не только физическую, чисто прикладную составляющую, но и морально-этическую, так как часто на дорогах может сложиться ситуация, когда выхода без потерь не будет. Тут можно будет увидеть дилемму вагонетки во всей красе, так как выбор может из следующих вариаций: врезаться в автомобиль, в котором передвигается семья, или же, избежав столкновения, влететь на остановку, на которой ждут автобуса люди. Эта проблема, в достаточной степени, замедляет существенное развитие автопилотов, так как встает вопрос, кто будет отвечать за ущерб, нанесенный транспортным средством, двигающимся автономно. Пока что не существует и развитого правового регулирования. Поэтому навигация автономных технических средств на дорогах общего пользования на постоянной основе невозможна.
В случае с роботами, которые работают в помещении, вопрос навигации является довольно хорошо изученным.
В частности, для решения этой проблемы используются лидары, которые сейчас способны не только обнаруживать объекты в зоне работы системы, но и помогать контролировать скорость объекта, для лучшего маневрирования. Кроме того, они же могут помочь выбрать оптимальное место для установки и проложить наиболее корректный маршрут, в текущих условиях.
Постепенное развитие процесса навигации позволило пройти путь от проводов, до практически полной автономности (ограниченной только мощностью батареи), обеспеченной лидарами, которые могут работать в диапазоне 360⁰. Здесь возможны различные варианты, в зависимости от сложности конструкции. Один из возможных вариантов – использование отражателей, что действительно просто и не требует значительных технических ухищрений. Но, такой подход приносит и дополнительные ограничения – отражатели должны быть видны, иначе система может потерять понимание своего положения в пространстве и сбиться с курса. Это касается и другого метода навигации, когда робот ориентируется посредством видеокамер, направленных на потолок и фиксирующих наличие источников света.
Лидары сейчас являются одним из самых распространённых компонентов для решения проблемы навигации. Они проделали действительно серьезный путь с начала века – ранее они занимали довольно большую площадь и не обладали существенным диапазоном действия, тогда как сейчас он может достигать двухсот метров, что перекрывает потребности для работы внутри помещений. Улучшилась частота испускаемого импульса и точность обработки полученных сигналов. Эти сигналы помогают составлять план местности, которая окружает автономную систему, что позволяет получить представление о положении объектов в пространстве. Они поступают неравномерно, так как встречают преграду на пути, что по их возвращении позволяет создать карту пространства в конкретный момент времени, по которой может двигаться робот. Получить представление о том, как именно робот «видит» окружающее пространство можно ниже (рис. 2).
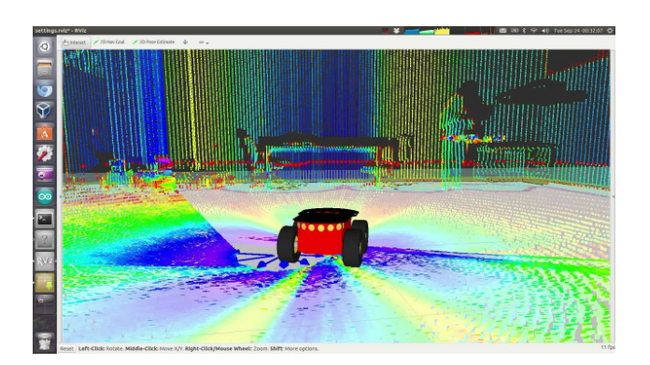
Рис. 3. Складские роботы компании Alibaba
Естественно, количество роботов на маршруте существенно осложняет задачу навигации, но и ее сейчас удается преодолеть, при помощи развития вычислительных мощностей. Также стало возможным многоуровневое перемещение складских систем, включая перемещение по рядам и в вертикальном измерении.
Технический прогресс значительно увеличил доступность этих систем, так что их можно использовать для решения проблем во множестве ситуаций даже при несколько ограниченном бюджете.
Существующие системы часто используют метод навигации, называемый SLAM (simultaneous localization and mapping). Он предполагает одновременную локализацию и построение карты, что решает проблему перемещения даже в неизвестном пространстве, так как позволяет создать карту помещения в процессе движения, чего ранее не было достигнуто. Но метод не идеален, возможна ошибка перемещения, которая накапливается по ходы выполнения задачи. Сейчас система навигации стала доступна в значительной степени, так как многие из разработок имеют открытый статус и доступны для ознакомления.
Существуют различные библиотеки с принципиальными алгоритмами работы навигационных систем, как и движения автономных комплексов. Здесь можно увидеть, как чисто теоретические изыскания, позволяющие создать эффективные математические модели (MathLab), так и адаптированные под решение практических задач, в частности, инструментарии навигации роботов Университета Карнеги-Меллона (CARMEN) и Инструментарий программирования мобильных роботов (MRPT).
SLAM наиболее распространённый способ навигации, но не единственный. Часто его использование применяют с одометрией или же ультразвуковыми датчиками, так как можно столкнуться с рядом ошибок. В частности, если говорить о перемещении по складу, то робот может не понять, что он вернулся именно в ту точку, с которой отправился. Так же может произойти такая ситуация, когда контуры объектов не замыкаются, так что робот не может найти идеальную траекторию, чтобы их обойти. Это может быть сопряжено с задержкой при движении, а также со столкновением, особенно если объект неоднозначно отражает лазерные лучи.
Таким образом, проблема навигации до сих пор остается действительно важной и требует дальнейшего исследования и комплексного подхода, так как цена ошибки может быть довольно большой, а существующие системы не всегда могут уверенно справляться со сложными ситуациями. В частности, подобное привело к осмысленному отказу от лидаров в TESLA, где отдали предпочтение системам компьютерного зрения с помощью видеокамер. Развитие продолжается, возможно, с появлением более совершенного искусственного интеллекта и более эффективных нейросетей, а также закрытием пробелов в законодательстве, можно ожидать появление полностью автономных систем и на дорогах.
Подписывайтесь на наш блог, чтобы не пропустить новые интересные посты!
Современные железяки играют в футбол на турнире RoboCup в Таиланде. Разработчики хотят, чтобы через 30 лет они смогли обыграть кожаных мешков - победителей чемпионата мира. Ну, им придется очень сильно постараться.
Телеграм-канал Что Они Вытворяют
Привет.
Недавно закончил сборку вот этого робота.
Работает на raspberry pi, управляется контроллером от xbox.
Инструкция по сборке и список комплектующих тут https://zzbot.org/projects/apc-1-hexapod/
На снегоходной гусенице и мотор колесах собрал маленькую платформу с дистанционным управлением. Назвал его UMKA. В видео полный обзор и длинно пост ниже с фотками с тестов.
Глядишь и отправят нашего робота куда-нибудь на марс в ракете Рогозина )))
А что, я использовал редукторные мотор-колеса для вращения гусеницы. Моторы не мощные, всего по 750 Вт номинальной мощности, но этого вполне хватило для вращение небольших снегоходных гусениц.
Вроде бы я читал что в космосе стараются не делать цепные редуктора, поскольку трущиеся детали будут завариваться в вакууме. Поэтому чаще всего используют мотор колеса.

А пока РосГосКосмас думает над предложением, я протестировал в платформу в различных условиях. И по воде погонял его, и по ступенькам и по песку и даже потаскал прицеп.

Все тянет и не ломается блин, думал сдуется он на первой кочке и буду тащить волоком до машины. Но нет, и в 45 градусов заехал по бетону, и бордюры до 10 см переезжает легко. В общем удивил так удивил УМКА.

Конечно по ступенькам вес не пробовал поднимать даже, думаю не потянет, сам поднимается, но с усилием. Причем если первая ступенька не стандартная (150х300) а чуть выше, уже все - не едет.
Видимо нужно было упоры добавить как у тактических роботов, чтобы не заваливался, но это уже в следующих тестах.

Заодно выявил и еще один косяк, при езде вдоль по склону начинается сползать гусеница на одном из модулей. Долго искал причину, визуально вроде все одинаково, но оказалось что именно в этом модуле гусеница была чуть слабее натянута а ключи с собой не взял.
В общем по травке не много покатался, скучно оказалось. Верх и вниз легко и "кругами на полях" и змейкой, все едет, и по кустам и по травке.

Кстати и вес мой потянул без проблем. Я думал будет контроллер отключать по перегрузке тока или перегреву, но нет, видимо угадал с подбором компонентной базы и настройками.
Но во когда садишься на него сильно почувствовал что значит выражение "все кишки вытрясли". Амортизации нет, поэтому катки по грунтозацепам скачут не слабо. Конечно самому роботу это не критично, и оборудованию на нем. А вот человеку чувствительно, поэтому использовать именно эту платформу для людей с ограниченными возможностями под вопросом.

Кстати крышку на тестах плохо закрепил, народ через 2 минуты тестов прибегал что случилось - гремела она как будто реальный танк едет. Видимо конструкция рамы, которую спроектровал коробкой чтобы максимально защитить электронику от влаги сработала как корпус барабана, а крышка без герметика как перепонка. В итоге через пару препятствий снял крышку совсем.
Но нагрелась крышка не хило, в день тестов первые жаркие деньки были на набережной, думаю можно было легко зажарить яичницу прям на крышке робота, вот был бы пранк для прохожих.

Самые сложные препятствия для робота, как оказалось, не ступеньки и не песок, а бревна. Высота платформы всего 25 см, и препятствия выше 15 см она уже не берет. Заезжать заезжает, а вот перевалиться уже не может. Пилит как бензопила гусеницами а перепрыгнуть не может.
А вот камни почти любые пролетает на ура.

Собственно и как подъемы. Поскольку моторы редукторные, то свободного хода почти нет. Поэтому платформа не стала сползать по подмостям, даже если отпускаешь джойстики пульта.
Конечно одному не всегда удобно, где то надо поддержать а обе руки заняты пультом. Настроил управление так, чтобы каждый джойстик отвечал за свои гусеничные модули. Как оказалось пульт не поддерживает микширование каналов, чтобы можно было все управление завести на один джойстик.

Но тестами остался доволен как слон. Все время думал "вот бы такую игрушку в детстве, вот было бы веселье".
Конечно термин "робот" подходит для этой платформы условно, это скорее какое-то промежуточное недорешение. Максимум что можно делать это возить небольшие грузы (до 150 кг) за пользователем, или может перед оператором.
Чтобы он стал полноценным роботом нужно уже добавлять электронику выше классом и настраивать режимы беспилотного управления, но это уже совсем другой бюджет проекта.

В общем начало положено, что будет с проектом дальше не знаю.
Может вы подскажите в комментариях как можно применить этого гусеничного "робота" для ваших задач?
«Чат на чат» — новое развлекательное шоу RUTUBE. В нем два известных гостя соревнуются, у кого смешнее друзья. Звезды создают групповые чаты с близкими людьми и в каждом раунде присылают им забавные челленджи и задания. Команда, которая окажется креативнее, побеждает.
Реклама ООО «РУФОРМ», ИНН: 7714886605
Космический робот здорового человека. Два манипулятора с камерами, без атавизмов в виде готовы, корпуса и ног.
Джейсон Рейнбоу —11 июля 2022 г.
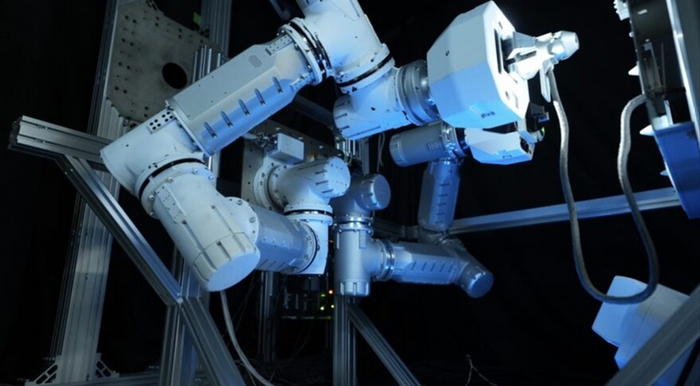
GITAI стремится автономно выполнять обслуживание, сборку и производство в космосе с помощью своей роботизированной системы S2 в космическом вакууме. Предоставлено: GITAI
ТАМПА, Флорида — Японский стартап GITAI планирует впервые продемонстрировать возможности робота-манипулятора на Международной космической станции в следующем году.
11 июля GITAI заявила, что ее автономная 1,5-метровая роботизированная система с двумя руками (S2) будет установлена на Bishop Airlock, модуле, финансируемом американской компанией Nanoracks.
Стартап стремится достичь 7-го уровня технологической готовности НАСА (TRL) в результате демонстрации, подтверждая его осуществимость в качестве технологии, которую можно использовать в космосе.
S2 достиг TRL 6 в феврале после выполнения задач в термовакуумной камере в Космическом центре Цукуба, штаб-квартире японского космического агентства JAXA в Японии.
GITAI впервые продемонстрировала свою роботизированную технологию на борту МКС в 2021 году, когда ее космическая система S1 продемонстрировала способность собирать конструкции и управлять переключателями изнутри шлюза Bishop Airlock.
Шо Наканосе, основатель и генеральный директор GITAI, сказал, что его последние испытания приближают компанию к технологии, пригодной для полетов, для приложений за пределами МКС, включая обслуживание на орбите и исследование Луны.
«Наше видение состоит в том, чтобы предоставить безопасные и доступные средства труда в космосе, и эта возможность на шлюзе Бишопа приближает нас на один шаг к тому, чтобы это произошло», — сказал он.
На МКС уже есть три значительно более длинных роботизированных манипулятора: канадский Canadarm2, японская система дистанционного манипулятора экспериментального модуля (JEMRMS) и европейский роботизированный манипулятор (ERA), запущенный в прошлом году.
Открытие представительства в США
22 июня GITAI объявила об открытии своей штаб-квартиры в США в Лос-Анджелесе и начале кампании по набору инженеров для расширения своей деятельности.
Объект будет использоваться для проектирования, производства и развития бизнеса в стране.
Стартап также работает с JAXA и японским автопроизводителем Toyota в Японии, чтобы разработать герметичный вездеход с экипажем для поверхности Луны.
GITAI помогает разработать роботизированную руку для марсохода Lunar Cruiser, который планируется запустить в конце 2020-х годов.