

Радиоуправляемая полноприводная платформа, с намеком на подвеску. Или коротко о скуке инженера, часть 3 - бесполезная
Первая часть
Вторая часть
Если серьезно, то я не знаю, зачем выкладываю эту часть. Она абсолютно бесполезна, ведь скорее всего проект дальше продолжиться с предыдущей части. Но кто мне запретит)
В общем, мысль была следующая - убрать двигатели от консольного крепления на ступицах куда нибудь наверх - для уменьшения неподрессоренной массы, да и так технологичнее.
Изначальный план был серьезным - были даже мысли насчет дифференциала. Но подумав и прикинув, мы решили(я и принтер) что упихать подобную конструкцию в наш масштаб практически нереально.
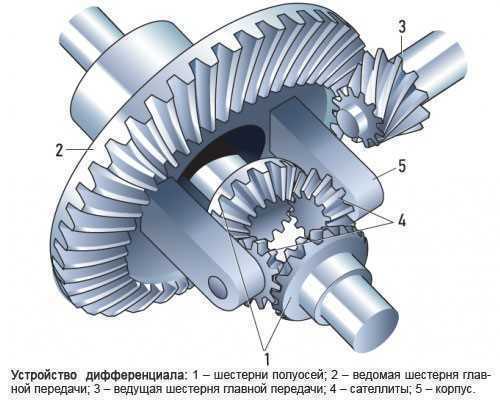
Поэтому остановимся просто на угловом редукторе.
Inventor позволяет проектировать зубчатые передачи, поэтому просто накидываем необходимые параметры, подбираем габариты чтобы все впихать и получаем пару шестерней.
Потом раскидываем сборку, шестерни одинаковые так что пофиг, какую открывать, и превращаем одну из них в приводной вал.

А в другой просто делаем посадку на вал мотора.
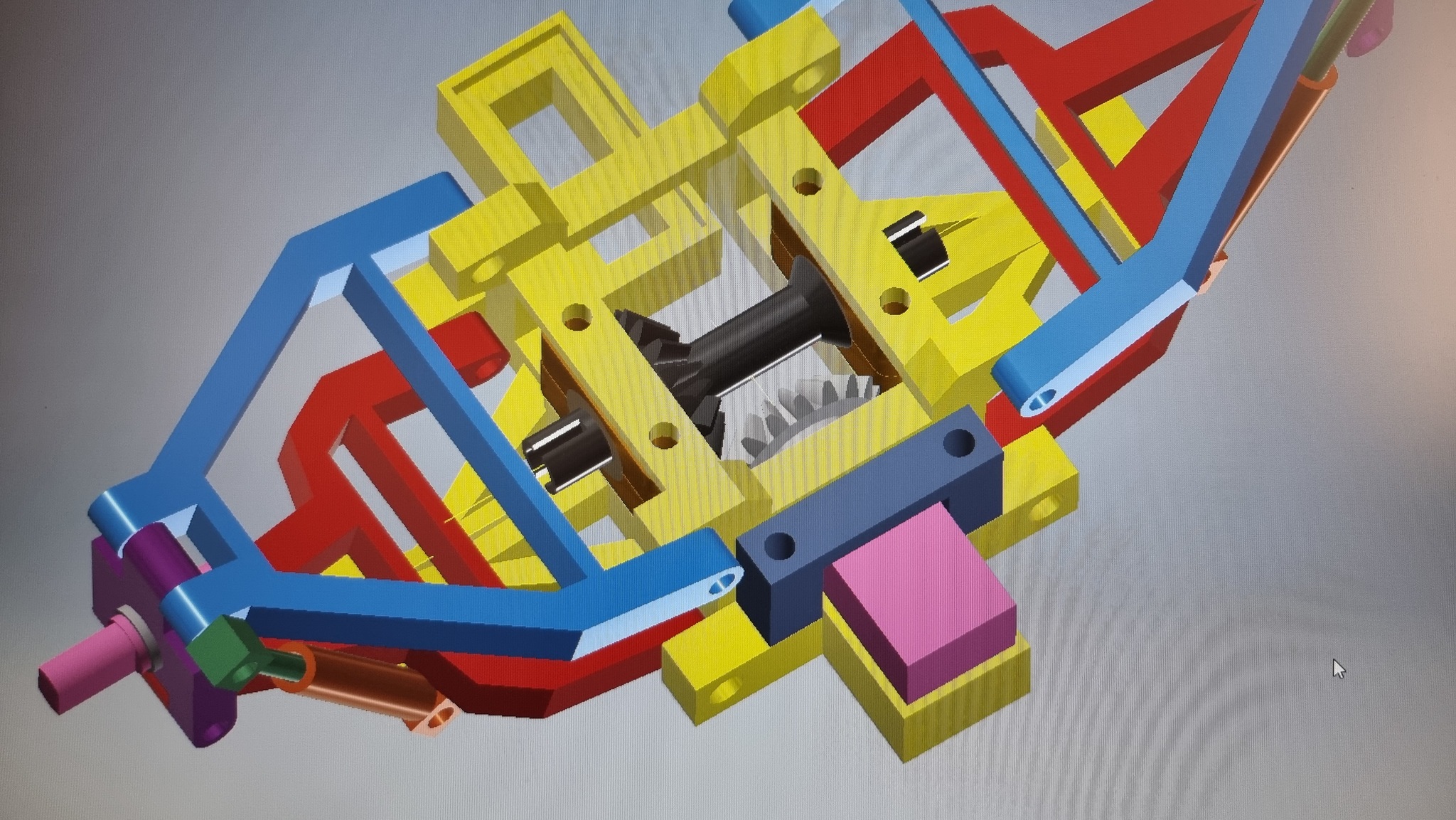
Лезем в общую сборку, изобретаем место под мотор на подрамнике(в первой версии мотор был один, потом добавился и второй), крепление мотора, крепление приводного вала - через втулки, для лучшего вращения, втулки в свою очередь в разрезной оправке. Новые ступицы, под вращающийся вал, сам вал колес, который крепится стопорным кольцом.
Отдельное развлечение - это привода, но о них позже.
Запускаем печать, в этот раз много проблем и ошибок, особенно с приводами, чтобы заставить это работать... Опять тонны деталек для бога деталек.

А вот тут мы можем видеть стайку подрамников, пришедших на водопой.

В общем, с горем пополам, получаем первый рабочий прототип. Я даже видео записал, по просьбам трудящихся!
Ну и пошло поехало дальнейшее исправление проблем - привода нужны толще, в верхнем положении иногда закусывает... И так далее. Попутно выясняется, что один моторчик ну совсе не тянет, поэтому появляется второй, ну и в итоге на свет явилось сие чудо.


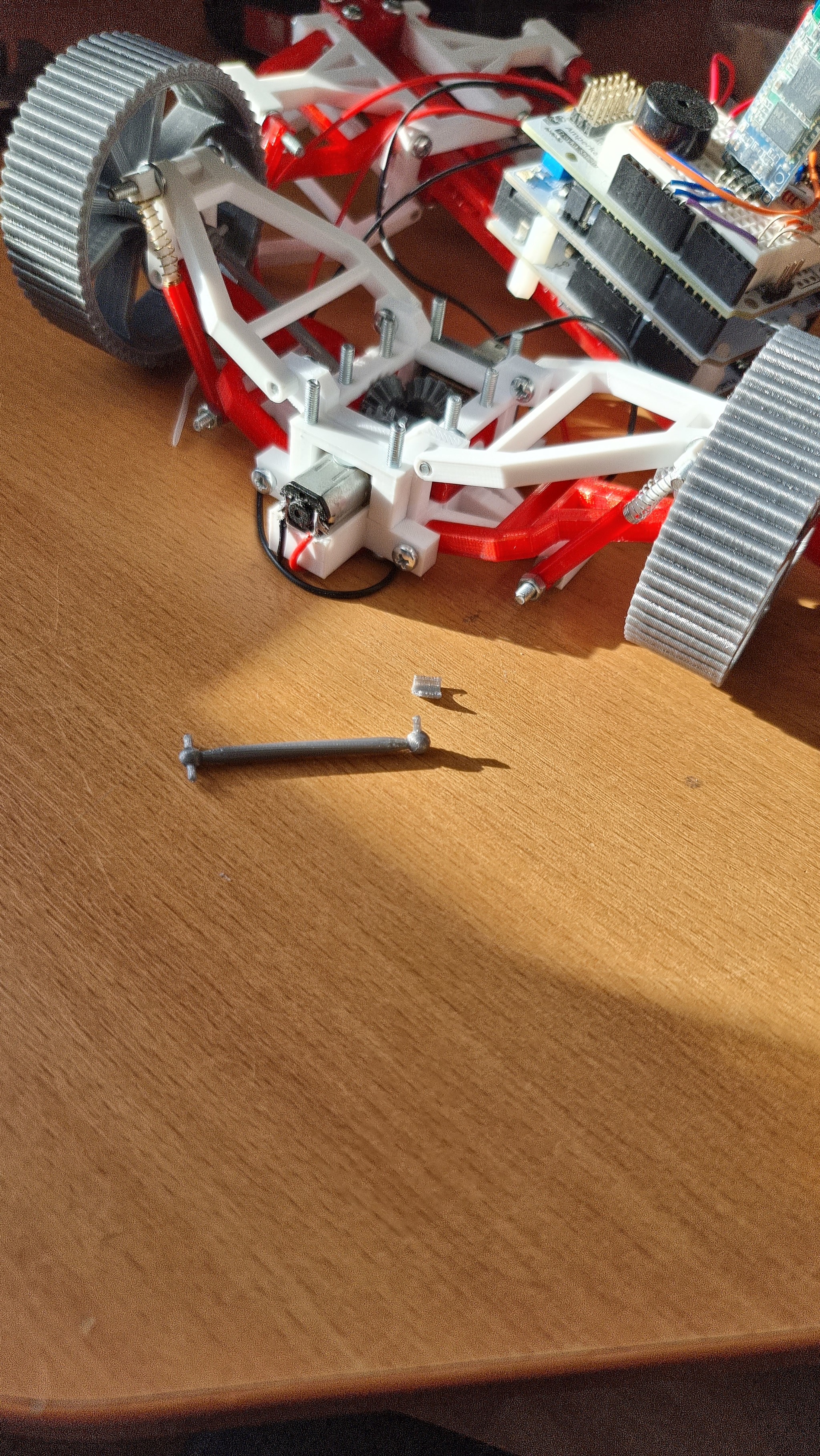
Попутно зачем то сделал печатные колеса, но они оказались так себе, надо чем то имитировать покрышку, иначе сцепление нема. Ну и по лежащему рядом приводу на первом фото можно понять, что все равно оно ни черта не работает. Привода слишком тонкие, как бы я не пытался их увеличить, их либо сворачивает в спираль, либо обламывает. А в последней итерации, обломало шаровое соединение на приводном валу.
Все тупо упирается в масштаб - слишком тонкими выходят привода, слишком мелкие шаровые соединения и так далее. Вот еще фотка в сборе, просто так.

Резюме следующее - скорее всего, я вернусь к расположению моторов на ступицах, только доработаю схему, чтобы исключить люфты и прочие дефекты. Если будет здравая мысль, как все таки сделать нормальный привод - может быть вернусь к этому. А еще в планах есть рулевое управление, ууу...
Лига 3D-принтеров
2.5K поста12.2K подписчика
Правила сообщества
Запрещено хамство и оскорбления, уважайте чужой опыт и труд