



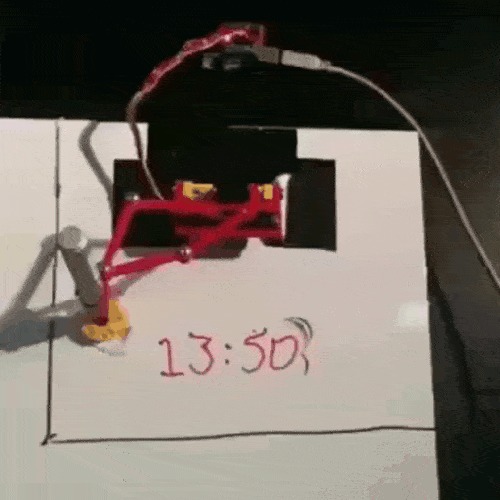

Пробная платформа с шестью ножками на Arduino-Uno.
Возник интерес самому сконструировать гексапода. В качестве такой действующей лаборатории для изучения программирования.
Посмотрел разные статьи в интернете, решил начать с простых ног - на 2-х сервоприводах. Ну почему у меня все получается так сложно?
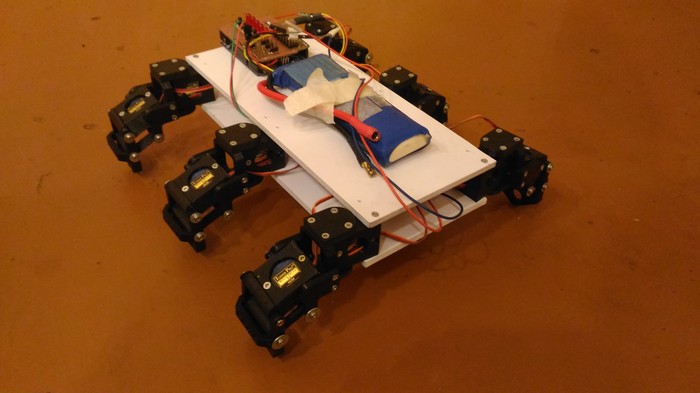
Даже на этапе рисования в редакторе выглядит пугающе. После печати, количество деталей зашкаливает.
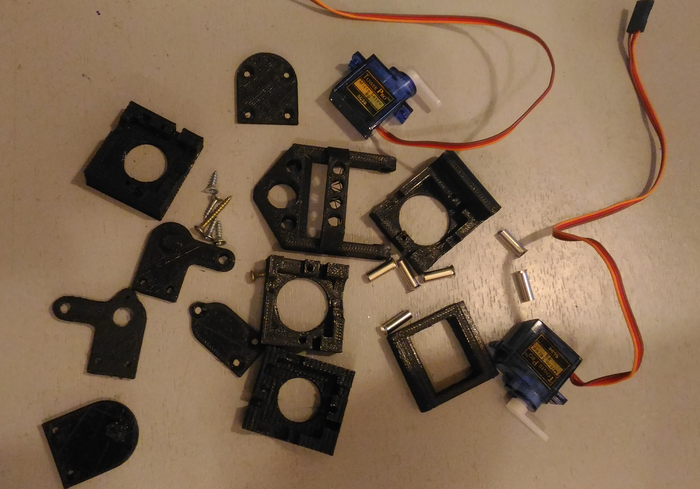
Даже смотрю, одной детали не хватает. Ну что, напечатаем и соберем все шесть.

С платформой мудрить не стал, просто вырезал из листового ПВХ 5мм. А вот шилд решил сделать. Просто так удобнее настраивать - устанавливать "нули" сервоприводах и подключать всякое дополнительное. Нарисовал в KiCad, попросил MDIMAN выпилить платку на своем ЧПУ станке, спаял и не жалею. Действительно удобно.

Еще что хотелось добавить - построить гексапода - не самоцель. Просто интересно, а получится ли напрограммировать ему всякую разную походку, не подсматривая в чужие скетчи, а используя только свои слабые знания.
Кое что уже получилось, можно посмотреть на коротком, полутораминутном видео.
Теперь надо прикрутить радиоуправление - это уже я освоил, ну и поворачивать научить)
А потом можно и походки повеселее программировать.
Показать полностью
3
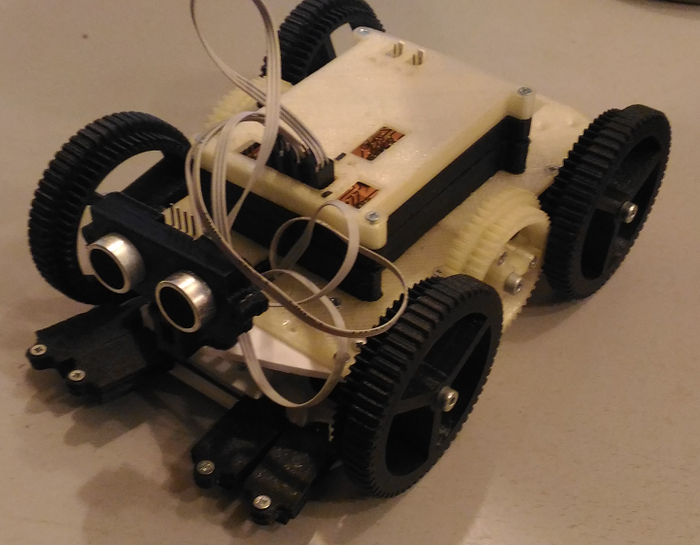
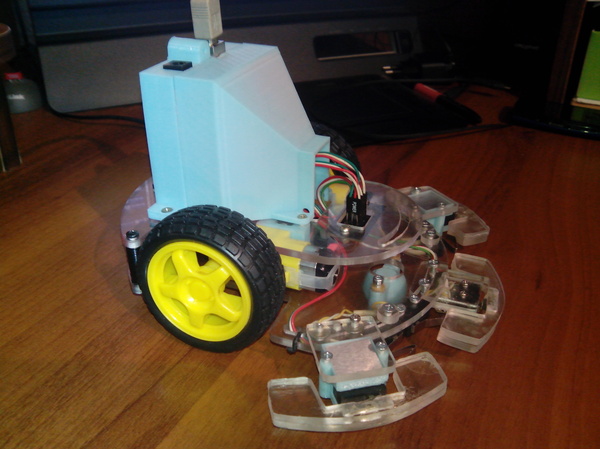
Самодельная четырехколесная полноприводная платформа для робота на Ардуино.
Я уже писал ранее о постройке такой платформы. После испытаний ее на радиоуправлении, кое-что перерисовал, создав версию, так сказать, 2.0.
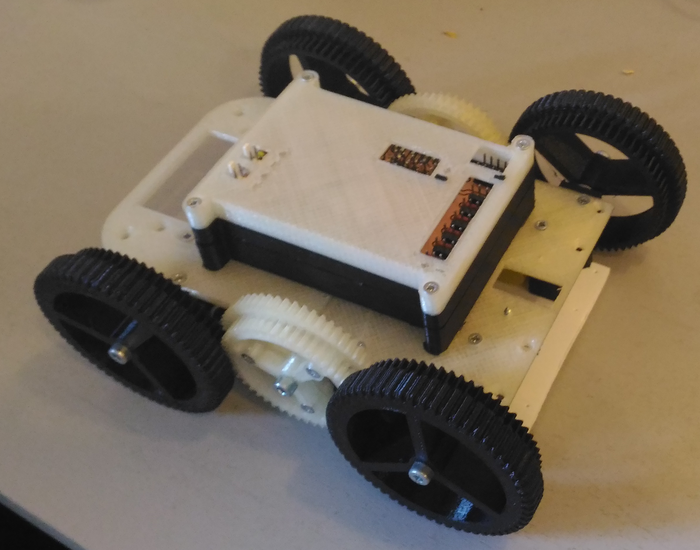
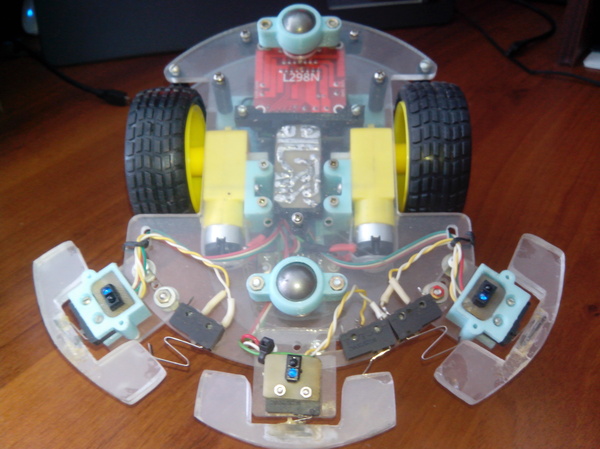
Передача крутящего момента на вторую пару колес также происходит с помощью редуктора.

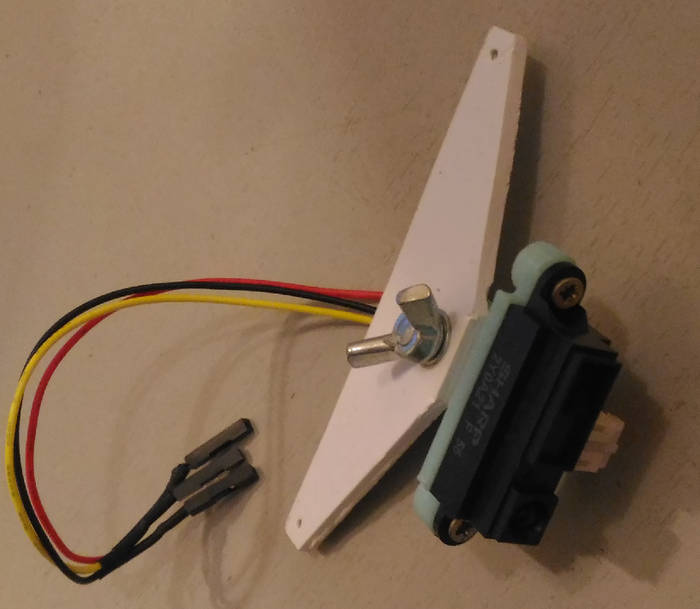
Теперь попробуем протестировать автономное движение платформы, оснастив ее различными датчиками. Дополнительные оборудование размещается на вырезанных из листового ПВХ ножом площадках, которые легко крепятся саморезами спереди и сзади платформы. На фото ультразвуковой дальномер и датчики линии.
Или, например, инфракрасный.
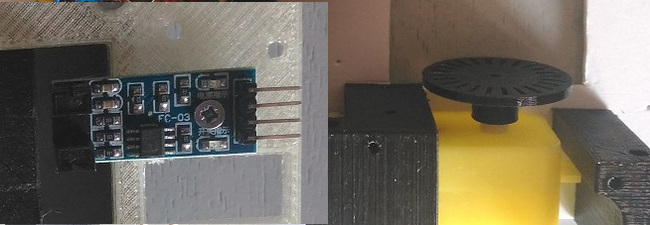
Датчик угла поворота со щелевым диском считает больше отверстий, чем их есть на самом деле. Нужно попробовать свой сделать, возможно это "дребезг контактов".
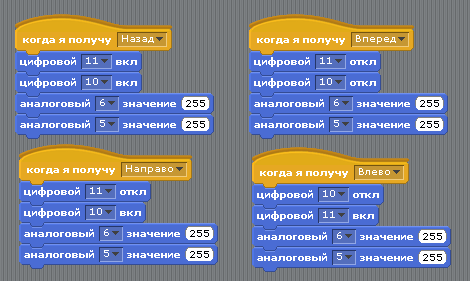
В остальном - бегает нормально, можно тренироваться в программировании и тестировать различные модели датчиков, которые легко устанавливаются. Результат тестирования платформы можно посмотреть на видео.
Показать полностью
5
Мышь с искусственным интеллектом
мышь была заводная (ну это для кошек из зоомагазина), с пружинкой, разобрал ее, вставил вместо механики, моторчик с редуктором, а еще батарейку, глаза из светодиодов, выключатель. Потом возникала мысль как это все зафиксировать и тут вспомнил про старый дедовский способ - изолента!!!!!!! Мышь стала выглядеть с изолентой - просто круто!! Как будто только что из травмпункта. И закрутилась она кругами, так как только одно колесо ведущее, да и стояло оно не вдоль мыши, а немного под углом!!!!!


коту пофиг!!!
Показать полностью
2

Робоплатформа на Arduino UNO для дочери
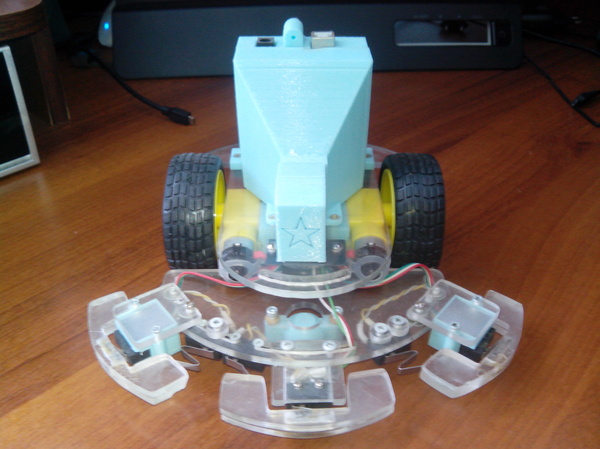
Решил сделать, для дочери, небольшого и простого робота, на основе робоплатформы.
Так как в школах внедряют робототехнику, то можно будет, отрабатывать навыки управления и программирования дома.
Схемы, файлы и небольшое подробное видео, положил тут: https://youtu.be/0C6kE8Iiy70
Немного фотографий робота:






Показать полностью
10


Поиграем в бизнесменов?
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.
Если был бы Русский Терминатор, он был бы таким-)


Показать полностью
2