

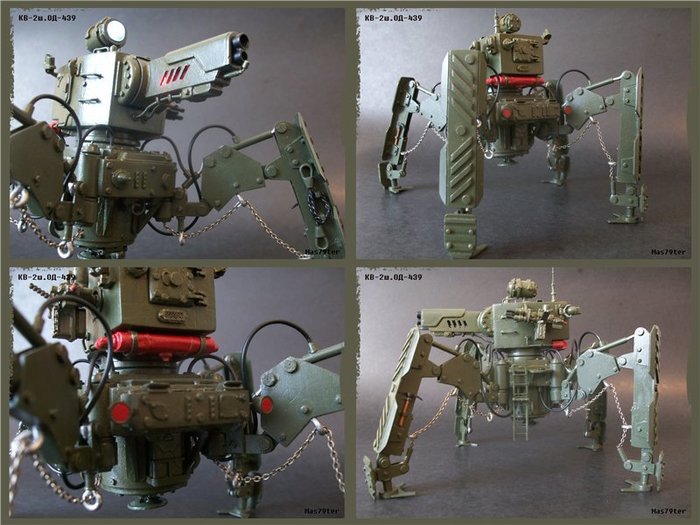
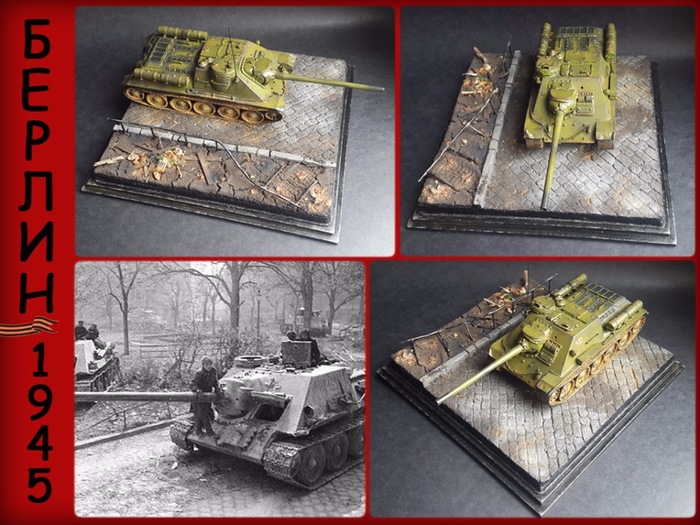
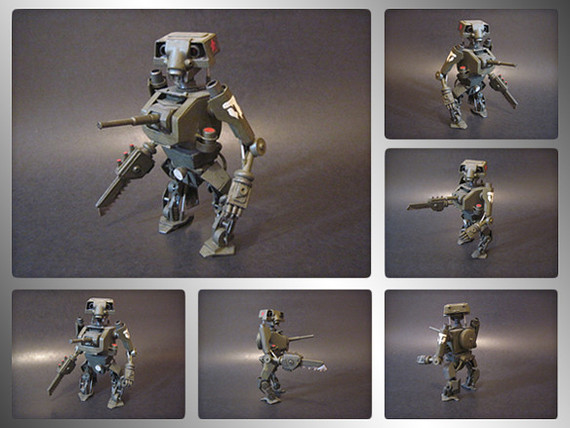
Роботы и танки
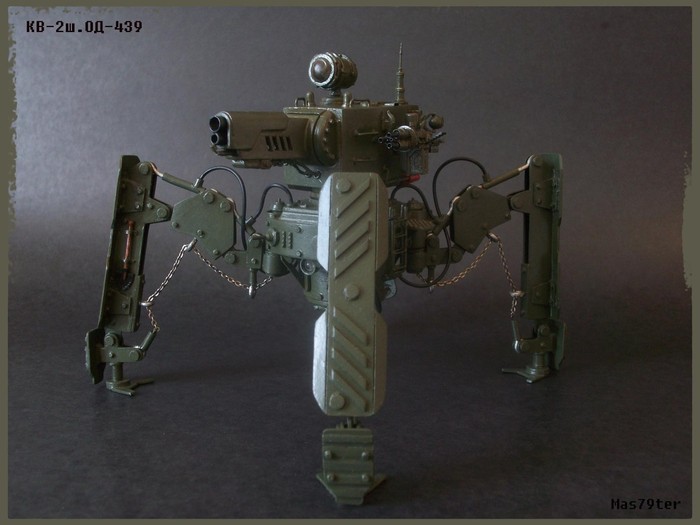
до покупки принтера...из хлама(зажигалки.рекламный пвх.ушные палочки.киндер .и т.д)))














Показать полностью
19
до покупки принтера...из хлама(зажигалки.рекламный пвх.ушные палочки.киндер .и т.д)))
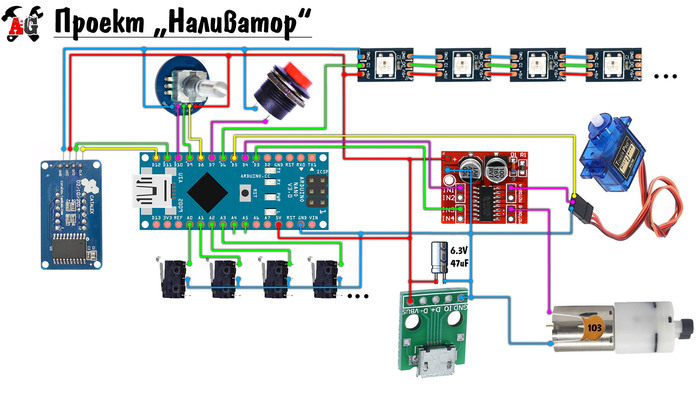
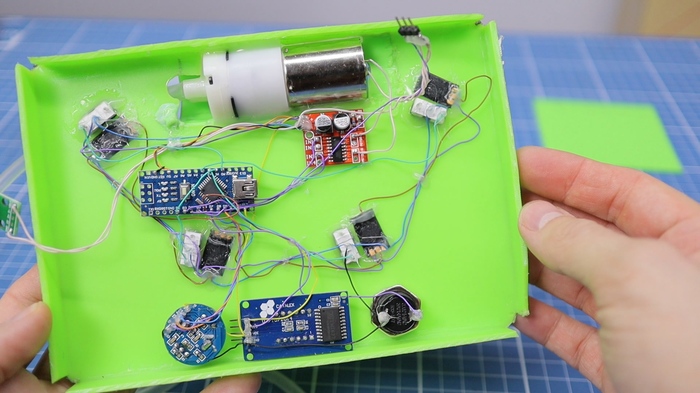
Привет, Пикабу! Вы много раз просили меня сделать "открытую" версию девайса "Наливатор", который разливает напитки по стаканчикам. Собственно, наконец-то дошли руки до сборки данного устройства. Фишки:
✔ Сделан из чемоданчика – набора отвёрток из фикс-прайса
✔ Остальные компоненты тоже из фикс-прайса
✔ Электроника с Алиэкспресс
✔ Система рассчитана на 1-6 рюмок
✔ Два режима работы + режим сервиса
✔ Подсветка рюмок:
- Красный – пустая
- Жёлтый – в процессе заполнения
- Зелёный – готово к употреблению
✔ Надёжный механический датчик наличия рюмки
✔ Складная конструкция
✔ Пищевая мембранная помпа
✔ Энкодер, дисплей
✔ Система “пинания” powerbank’a, не дающая ему уйти в сон
✔ Продуманная система энергосбережения: дисплей снижает яркость при простое, серво отключается от питания
✔ Используется моя библиотека для плавного движения сервопривода

Список компонентов (ссылки на Али есть на странице проекта у меня на сайте)
✔ Arduino NANO
✔ Адресная лента (под нарезку)
✔ Энкодер
✔ Кнопка
✔ Дисплей
✔ Концевики
✔ Драйвер
✔ Серво
✔ Модуль USB
✔ Помпа
КАЛИБРОВКА (РЕЖИМ СЕРВИСА)
- Подать питание с зажатой большой кнопкой
- Дождаться надписи SERVICE
- Энкодер управляет положением крана, на дисплей выводится угол
- Кнопка энкодера запускает помпу и таймер
- Удержание большой кнопки – выход из сервиса в обычный режим работы
РУЧНОЙ РЕЖИМ
- Буква А в левом краю дисплея
- Выставляем стаканчики и кликаем по кнопке
- Во время цикла заполнения можно доставить стакан, он будет заполнен
АВТОМАТИЧЕСКИЙ РЕЖИМ
- Смена режимов – удержание большой кнопки
- Буква Р в левом краю дисплея
- Каждый поставленный стаканчик будет заполнен!
ОБЩЕЕ
- Если поднять стакан до заполнения, помпа отключится и система перейдёт к следующему стакану
- Если наблюдаются глюки (неправильное положение крана при заливке, промахи) – проблема в питании! Попробуйте добавить конденсаторы как на схеме, попробуйте другой powerbank, а ещё лучше проверить работу системы на нормальном зарядном блоке питания от смартфона. Система многократно протестирована, работа отлажена, неадекватное поведение замечено при плохом питании.
ПОДДЕРЖАНИЕ ПИТАНИЯ
Практически все powerbank’и отключают линию питания при отсутствии нагрузки, специально для этого в системе предусмотрено периодическое подёргивание сервопривода с целью создания скачков нагрузки, которые вынуждают powerbank не уходить в сон и не отключать наливатор от питания. В этом режиме система будет каждые 15 секунд дёргать приводом и мигать дисплеем, если вам это не нужно – отключите настройку KEEP_POWER, присвоив ей 0 вместо 1

P.S. А как вы боретесь с осенней депрессией? Я программирую китайские железки =)
P.P.S. Рекламная вставка на 4:23-6:13
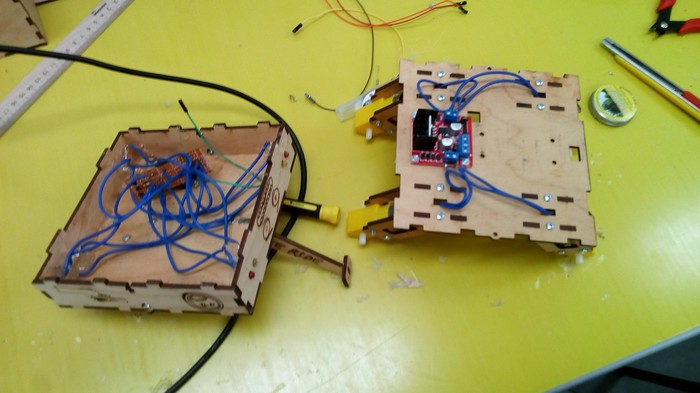
Руки дотянулись только сейчас.Привет читатель,сегодня ты узнаешь историю создания робота.Зделан он был на ардуинке из фанеры.Весит плюс минус 2кг.Начинал с корпуса.Вырезал на резаке корпус,нанес рисунки лазерным резаком(или как он называется)Делал кстати с другом

Дальше я установил дешевые китайские моторчики,это к слову сказалось на скорости.И начал кодить на ардуинке.
вот моторчики

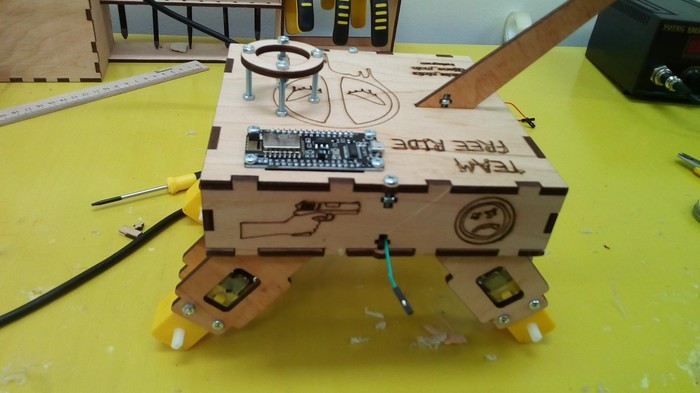
Установил моторчики и "ногу"на которых расположились гвозди.Внутри пока пусто
Код написан,откладываем в долгий ящик.Вот пришел контролер моторчиков.Устанавливаем модуль и паяем!
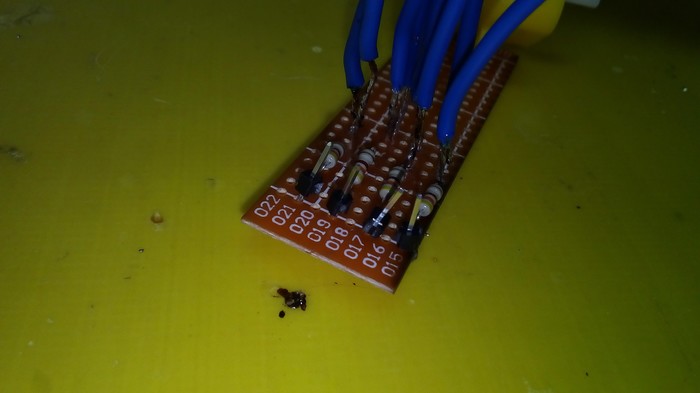
Дальше поворотники из светодиодов.Светодиоды паяем на небольшой плате.Всего 4пары
светодиодов.Паяем через резисторы,так как напряжение 5v.Минусы спаиваем в одну кучу и выводим пин(минусовый).Пока оставим плату
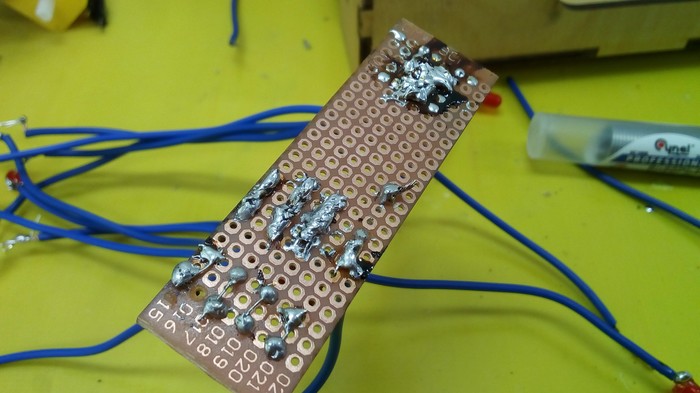
Вот и пришел вайфай модуль.Минус подключаем к G (земля) на модуле,а провода светодиодов подключаем к пинам на модуле.Потом зажимаем в зажимы на плате пины (контроллер моторчиков) и подключаем к вайфай модулю.
Зеленый провод который торчит это земля.
Ставим на колеса и крепим черный файфай модуль
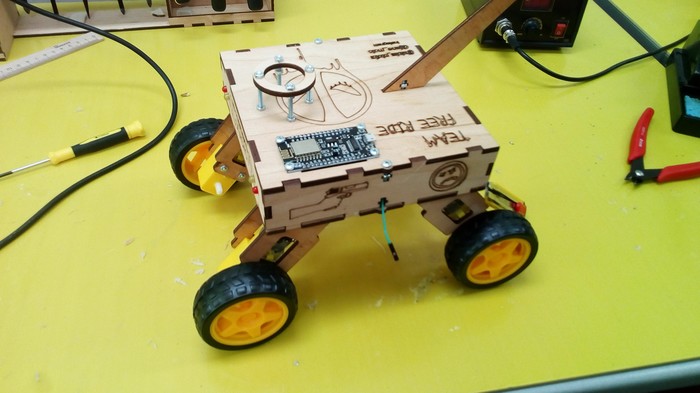
Пол дела сделано!Теперь ко дну прикручиваем аккамуляторы, и выводим минус на вайфай модуль.5v на контроллер моторчиков.Припаиваем кнопку.
Иии... готово! скручиваем корпус,регаемся в Blynk,получаем код доступа на почту к проэкту,вставляем то что прислали в код, и заливаем его в бота через USB.Немного настроек и он ездит!
Сорян за плохое качество,записывал на Ардуино!
Это был мой первый пост на пикабу,поэтому пишите о косяках рад буду выслушать.Если нужны пруфы то вот моя инста о создании этого бота @Hukolas_robotics
Управляется со смартфона,чукча не писатель,Мир вам
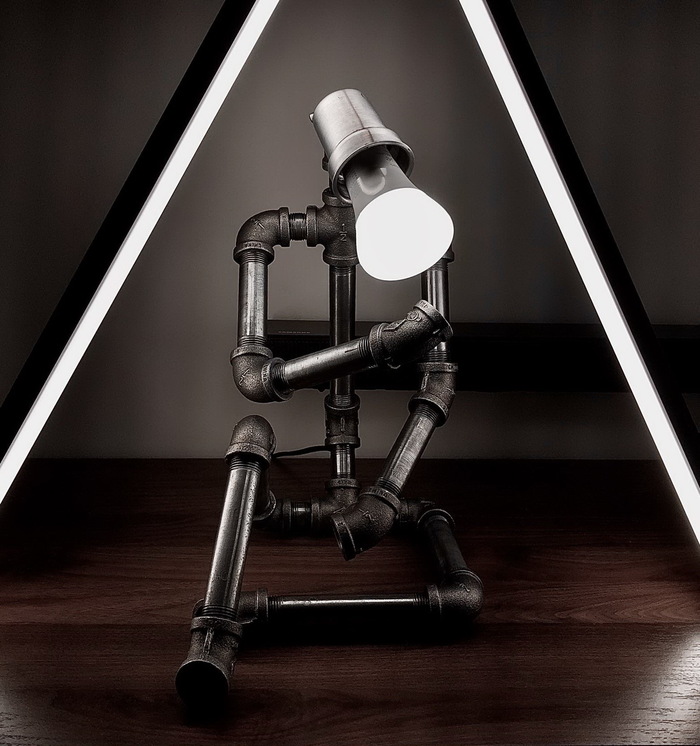
Сервисные инженеры - очень страшные люди) Когда руки с нужного места, а скука заставляет заняться хоть чем-то - получаются очень забавные штуки) Главное - чтобы он не ожил и мир не пошёл захватывать)

Из чего сделан - угадывайте сами, я уже несколько раз рассматривал, так и не понял) Стоял рядом с моим бывшим офисом, пока не спёрли
Купил сегодня себе новый набор Ausini с симпатичным роботом:

Стоил 250 рублей в магазине игрушек рядом с домом.

Открываем, внутри два пакета с деталями, комплект наклеек и инструкция. Детали не качественные, но может модель получится хорошая?

Голова - симпатичная, мне нравятся детали антенн, пригодятся для самоделок.

Тело хрупкое, постоянно что-то отваливается.


Руки и ноги подвижные, из пазов не вылетают, но вот само крепление к телу робота не выдерживает ни какой критики, руки-ноги не держатся и постоянно норовят отвалиться.

Щит и меч добротные, сделаны из прозрачного пластика, ручка у щита подвижная, а вот меч для таких длинных рук коротковат.

В комплекте с роботом идет штырь с круглой платформой, который торчит из зада, его хорошо видно на коробке. Подозреваю, что китайцы положили его, что бы окончательно унизить этого горе-робота, в качестве подставки штырь использовать не возможно, робот постоянно норовит завалиться или растерять конечности.
Для того, чтобы сфотографировать результат, пришлось поставить на платформу.

Подводя итоги
Плюсы:
- Хорошая задумка;
- Много подвижных элементов;
- Интересный образ.
Минусы:
- Высокая цена, 3 рубля за деталь;
- Низкое качество деталей;
- Сложно придать эффектную позу, чтобы поставить на полку или использовать в игре, если вы понимаете о чем я ;-)
Стоит добавить несколько деталей и Капитан может стать намного лучше, смотрите сами:

Привет пикабу!)
Сегодня расскажу о том, как выжить инженеру без сварки :) А если более конкретно - о том, до чего дошла технология моих электромобилей. В прошлых своих постах я рассказывал о том, как построил свой электромобиль и о первом успехе. Ссылочка . Внизу поста есть видосик, любители ютубика - мотайте вниз!
Прошло уже несколько лет, и я решил, что не стоит моему электромобилю простаивать просто так. Да и как раз подвернулся случай - есть необходимость в перетаскивании довольно тяжелых грузов по небольшой стройплощадке. И новый электромобиль я решил сделать для того, чтоб эти тяжелые работы автоматизировать.
Кстати, автоматически исчезла проблема с батареями - там на объекте трёхфазная сеть - 380 вольт. В качестве тягового двигателя я выбрал трехфазный мотор на 2,2 квт. Осталось только решить вопрос с рулевым управлением, вот тут-то и встал основной вопрос - нужно, чтоб машиной можно было управлять по радиоканалу. Пришлось собирать сервопривод. Короче - из электромобиля начал получаться робот.
Во время сборки сервопривода я пожалел, что у меня нет сварочного аппарата. Все мои машины собирались из профильных труб на болтах и саморезах, но то были машины от которых не требовалось много, а сейчас машину надо попробовать в роли тягача. Короче эта модель, к сожалению не стала исключением и вся машина, абсолютно вся, включая нагруженный сервопривод собрана на болтах, уголках и саморезах. Хотя если выбрать правильный ракурс, то смотрится довольно эффектно:
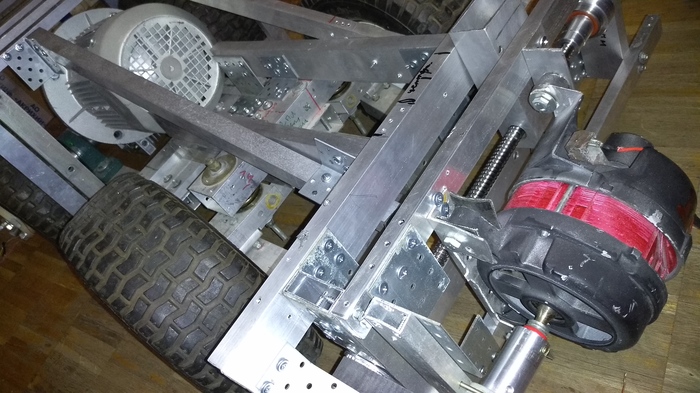
Чем-то смахивает на болид формулы 1. Только передний обтекатель - никакой не обтекатель, а тот самый сервопривод на 0,5 квт. Вообще за время сборки таких машин я понял одну вещь - всё, что ты хочешь сделать по плану - по плану не идёт. Машинка должна была получиться 110 см в длину, а сейчас уже 150. Как-то очень резво она разрослась.

Тем не менее практика показывает, что даже такие конструкции, собранные из уголков и саморезов могут работать - мои старые машины это показали. Какая судьба ждет эту машину - покажет время, сейчас я обвешиваю её проводами и системами управления. Когда закончу - поделюсь результатом :) Если этот текст был интересен - подписывайся! А вообще - пишите комменты, хотелось бы конструктивной критики. Ну и в качестве бонуса - видео:
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.








