
Пора в автосервис
Изношенные на марсианских тропах колёса марсохода Curiosity
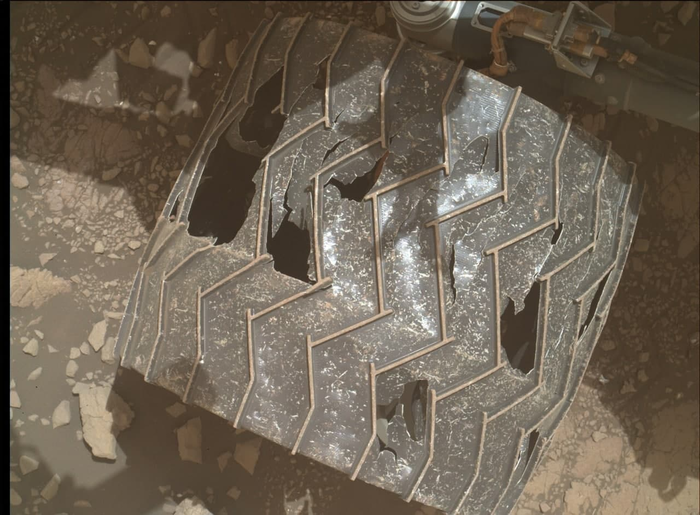
Изношенные на марсианских тропах колёса марсохода Curiosity
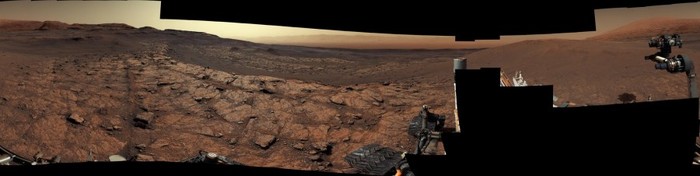
Новая панорама Марса от Curiosity
В начале января марсоход Curiosity отметил 3000-й сол (солнечный день) своего пребывания на Марсе. По случаю этого события специалисты группы сопровождения миссии опубликовали следующую панораму. Она составлена из 122 фотографий, сделанных Curiosity 18 ноября 2020 г. Баланс белого скорректирован таким образом, чтобы цвета пород соответствовали тому, какими бы их увидел человеческий глаз.
https://www.jpl.nasa.gov/news/nasas-curiosity-rover-reaches-...
В центре панорамы можно увидеть дно 154-километрового кратера Гейла, внутри которого и находится ровер. Северная часть его вала заметна на горизонте. С момента своей высадки в августе 2012 года аппарат постепенно взбирается вверх по склону 5-километрового центрального пика кратера. Он известен под названием гора Шарпа. Мы можем увидеть ее фрагмент в правой части изображения.
Гора Шарпа состоит из многочисленных слоев осадочных пород, оставшихся со времен, когда внутри кратера Гейла располагалось озеро. Изучая их, ученые пытаются проникнуть в прошлое Красной планеты и понять, могла ли на ней существовать какая-то жизнь.
Также можно обратить внимание на то, что местность перед Curiosity покрыта рядом изогнутых каменных террас. Они могут образовываться, когда на склоне есть более твердые и более мягкие слои породы. По мере того, как более мягкие слои разрушаются, более твердые слои остаются, формируя небольшие каменные плиты.
Что касается Curiosity, то он все еще продолжает свое восхождение. Следующей целью ровера станет лежащий выше по склону горы Шарпа слой сульфатных пород.
До прибытия Персеваренца осталось ровно 45 дней, а это значит, что можно сделать пару постов посвящённых покорению красной планеты.
Мало кто задумывается, но человеческий опыт и знания имеют накопительный характер, это значит, что большому скачку, вроде марсианской колонизации, предшествует сотни и тысячи маленьких шагов. Благодаря которым появляется структурированный пласт знаний. Первые лэндеры летели к планете, мало что зная об атмосфере, точном положении планеты, систем ретрансляции и тд.
И даже системы посадки вырабатывались методом проб и ошибок. О них и будет пост. в посте будут видео на инглише, но они понятные.
Аппараты будут рассматриваться только Nasa. Если тема будет интересной, то можно поглядеть, что там с другими странами.
Поiхали!
Системы посадки подстраиваются под особенности конкретной миссии. У нас 2 пути: выходить на марсианскую орбиту и после этого сбрасывать посадочную платформу - лэндер (Если она есть) на поверхность, либо влетать в атмосферу Марса на скорости 5-10 км в секунду и переживать 7 минут страха.
Викинги 1 и 2 как раз из первых. Одни из первых аппаратов достигших орбиты Марса и первые успешно севшие. Имеют орбитальный аппарат и отделяемый лэндер. После более чем месяца полета на орбите и получения изображений, использованных для выбора места посадки, посадочные аппараты отсоединились. Затем спускаемые аппараты вошли в атмосферу Марса и совершили мягкую посадку в выбранных местах. Посадочный модуль "Викинг-1" приземлился на поверхности Марса 20 июля 1976 года.
В системе обеспечения мягкой посадки использовались радиовысотомер и радиолокатор, а также 8 ракетных двигателей тягой по 4,5 кг для обеспечения схода с орбиты, 6 двигателей ориентации тягой по 4,5 кг, лобовой экран диаметром 3,6 м. для аэродинамического торможения в атмосфере, парашют с куполом диаметром 16,2 м. для торможения с высоты ~4 км после отделения лобового экрана и 3 ракетных двигателя с регулируемой тягой (40—260 кг) для торможения с высоты ~1,2 км после отделения парашюта. Использовались посадочные опоры с встроенными амортизаторами из алюминия, которые сминаются при посадке, поглощая ударную нагрузку.
Следующий шаг: Mars Pathfinder – первый запуск марсохода в 1996 году.
Имеет стационарную платформу и первый марсианский ровер Sojourner (Кроха весит всего 11.5 килограмм).
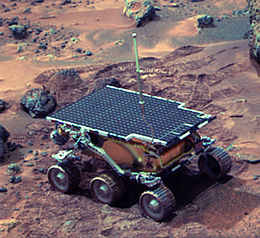
Особенность миссии в том, что впервые были использованы надувные шары для мягкой посадки на Марс и испытаны парашюты для торможения после прямого входа в атмосферу. Т.е. без выхода на орбиту! Место посадки было выбрано заранее, орбитальная ступень скорректировала положения аппарата , затем отделилась.
Спускаемый аппарат вошёл в атмосферу на скорости свыше 6.1 км/с, при этом теплоизоляционная защита предохраняла его от перегрева во время торможения в атмосфере. Лобовой экран в течение двух минут погасил скорость до 400 м/с. Затем был раскрыт парашют диаметром 12,7 м. Примерно за 8 секунд до удара о поверхность включились тормозные двигатели, и надулись амортизационные баллоны. Аппарат достиг поверхности Марса на скорости 25 м/с (90 км/ч) и отскочил от неё несколько раз до полной остановки! (BRUTAL!!)
Как видно из видео, двигатели для системы посадки встроены в капсулу и отделяется только тепловой щит, Длинный трос помогает комфортно определять высоту и не повреждать платформу реактивной струёй двигателей.
Когда ты будешь бегать внутри Зорба, вспоминай Пафайндер.
Следующий шаг: Mars Exploration Rover (MER)
Марсоходы второго поколения MER-A Спирит (Spirit) и MER-B Оппортьюнити (Opportunity). Спускаемый аппарат с марсоходом Спирит совершил мягкую посадку на Марс 4 января 2004 в кратер Гусева (координаты места посадки — 14.5718° ю. ш. 175,4785° в. д.). Спускаемый аппарат с марсоходом Оппортьюнити совершил мягкую посадку на Марс 25 января 2004 на Плато Меридиана (координаты места посадки — 1,95° ю. ш. 354,47° в. д.).

Спирит: Масса 1063 кг, масса марсохода 185 кг, а масса посадочной платформы 348 кг.
Идеологически система посадки осталась такой же как у Пафайндера – цельная структура капсулы, надувные подушки и большой парашют. Однако, так как аппараты намного тяжелее, площадь парашюта была на 40% больше, а надуваемые подушки обзавелись двойными стенками и стали более прочными. Аппараты вошли в атмосферу Марса на скорости 5.5 км/с (20000 км/ч) и с помощью систем торможения замедлились до скорость 20 км/ч, после чего таранили поверхность внутри Зорба.
Следующий шаг: Phoenix (2007 год). Первая фото-сессия посадки. «Феникс» — шестой аппарат, успешно севший на поверхность Марса. Также «Феникс» стал первым аппаратом, успешно совершившим посадку в полярном регионе Марса.

Камера (HiRISE) орбитального аппарата разведки Марса (MRO) сфотографировала Феникс, подвешенный на парашюте, во время его спуска через атмосферу Марса.
Phoenix вошел в атмосферу Марса со скоростью почти 5.5 км/с и за 7 минут снизил скорость до 2,2 м/с. По неизвестным причинам парашют был раскрыт примерно на 7 секунд позже, чем ожидалось, что привело к посадочной позиции примерно в 25–28 км к востоку. Данный аппарат уже представляет собой раздельную капсулу с парашютом и торможение движками на самом лэндере. Алгоритмы бортового компьютера участвуют в выборе места посадки.
Следующий шаг: Mars Science Laboratory (MSL) 2011 год.
Марсоходы третьего поколения Кьюрио́сити (Curiosity) и Персеверанс (Perseverance) (в рамках миссии Марс-2020)
Марсоходы представляют собой автономную химическую лабораторию в несколько раз больше и тяжелее предыдущих марсоходов «Спирит» и «Оппортьюнити». И самую современную систему посадки на сегодняшний день.
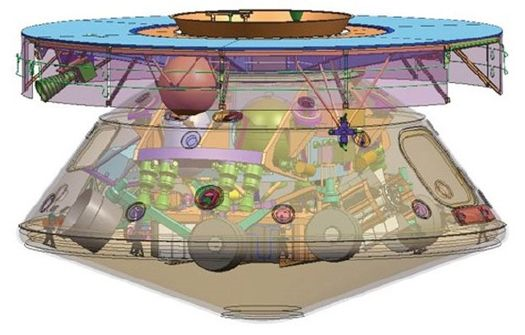
Схема марсохода внутри капсулы с перелетным модулем
Перелетный модуль отделяется от спускаемой капсулы, после чего последняя стабилизировала вращение (к Марсу аппарат летел с 2 об./с) и на скорости 5.8 км/с влетает в атмосферу Марса.
Чтобы капсула спускалась в нужное место под нужным углом её центр масс смещался от центральной оси, аналогично командному модулю Apollo. Это достигалось двумя сбрасываемыми вольфрамовыми балластами массой около 75 кг каждый.Вектор подъёмной силы управлялся четырьмя парами двигателей реактивной системы управления, каждая пара создавала тягу около 500 Н. Способность изменять точку приложения подъёмной силы позволяла космическому аппарату реагировать на окружающую среду и маневрировать к зоне посадки. Перед раскрытием парашюта капсула сперва сбросила оставшиеся шесть вольфрамовых балластов массой около 25 кг каждый, чтобы устранить смещение центра тяжести. Затем на высоте около 10 км при скорости 470 м/с раскрывался парашют и скидывался тепловой щит. Парашют диаметром ок. 16 м. позволял замедлить капсулу до скорости 100 м/с.
После этого от капсулы отделялся сам марсоход и прикреплённая к нему система «Небесный кран» (Sky crane). Двигатели этого модуля были разработаны на основе двигателей, использовавшихся на посадочных модулях Viking (Mars Lander Engine). Каждый из восьми двигателей создавал тягу до 3,1 кН. В это время марсоход был переведён из перелётной конфигурации (сложенное состояние) в посадочную, при этом опускаясь на «небесном кране» под тяговой платформой.
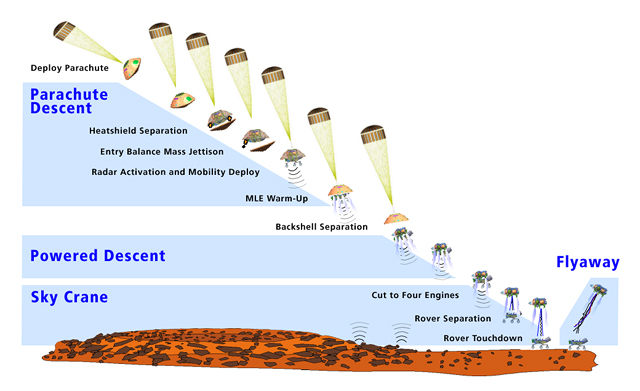
Система замедляла аппарат до приемлемой скорости,параллельно позволяла выбрать наилучшую область для посадки, после чего зависала над поверхностью, на трёх тросах мягко опускала его на поверхность. Выждав пару секунд, Небесный кран отцеплял тросы, увеличивал тягу двигателей и отлетал на 650 метров в сторону, после чего применял литосферное торможение.
Персеваренц будет садиться точно по такой же схеме.
Инновационность системы в том, что заданные алгоритмы сами выбирают место посадки, позволяя повысить точность приземления с десятков км до десятков метров. Отделение от капсулы позволяет снижать массу самой посадочной платформы, за счет того, что масса капсулы не учитывается во время торможения движками. А это значит, можно увеличить массу аппарата. На финальном участке движки работают всё время, получая данные от лазерных и радио высотомеров и обрабатывая в бортовом компьютере, что безопаснее, чем одноразовое их включение с последующим отключением. Зависание в метрах над поверхностью позволяет поднимать меньше пыли. Напомню, что первая часть экзомарса разбилась, так как движки отключились раньше времени из-за ошибок в ПО.
В будущем возможно будет снижаться толщина капсулы и её масса, т.к. в MSL они использовались с запасом, и возможно подвезут новые материалы для щита, снижая его массу. Накопленный опыт позволит совершенствовать алгоритмы, и бортовые компьютеры станут ещё более самостоятельными.
Для больших аппаратов концепцию скорее всего переработают. Возможно будет многовитковое торможение об атмосферу, после чего уже сход с орбиты. Либо выход на орбиту и уже после этого посадка. Возможно и от парашютов откажутся. Как здесь:
https://youtu.be/aooSD_YNbIcПри такой концепции можно и орбитальную станцию сделать и многоразовую систему взлётных капсул. Но всё это благодаря накопленному опыту на протяжение десятков лет. Надеюсь в мире будут сокращаться военные бюджеты и расти космические, ибо исследовать и колонизировать Марс – это богоугодное дело.

Ещё больше космических постов будет в профиле.
Уже совсем скоро состоится высадка очередного марсохода NASA под названием Perseverance на Красной планете. Накануне этого события в сети появилась запись, в которой инженер космического агентства раскрыл тонкости управления ровером.

Perseverance
Эван Хильгеманн, присоединившийся в 2019 году к команде инженеров, отвечающих за управление шестиколёсного марсохода NASA Curiosity, рассказал, что «многие активности, которыми занимаются роверы, на самом деле жёстко заскриптованы и запланированы ещё заранее на Земле». При этом из-за большого пинга при общении с Землёй, многие решения касательно «экстренных» ситуаций, марсоход вынужден принимать самостоятельно.
Хильгеманн также отметил, что команда, управляющая ровером, имеет несколько способов управления им. Так, например, в режиме «слепого вождения» на устройство передаётся лишь список команд и инструкций, на основе которых он будет действовать.
Также на руках у инженеров есть режим «визуальной одометрии». В нём марсоход передвигается и останавливается через каждый метр пути и делает свежую фотографию окружения для отправки данных на Землю. А уже на нашей планете компьютер принимает решение о безопасности дальнейшего движения по выбранному маршруту.
Но самым продвинутым можно назвать режим «автонавигации» или «автонав». В нём устройство способно передвигаться в полностью автономном режиме.

Curiosity
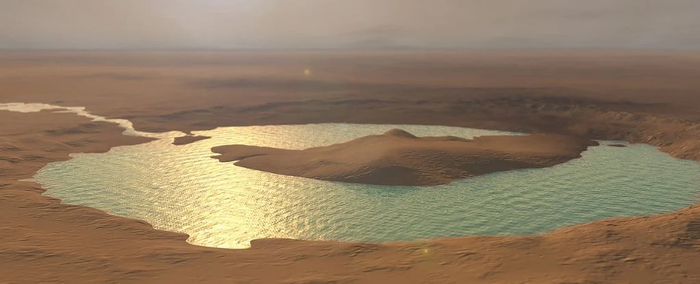
(Как бы мог выглядеть кратер Gale в прошлом)
Уже достаточно давно мы имели доказательства того, что на Марсе существовала вода. Недавно, однако, эти доказательства подтвердились с новой силой. На основе новейших данных марсохода Curiosity, команда ученых из университетов Cornell, Hawaii, и Jackson State, а также исследователей из NASA Jet Propulsion Laboratory, подтвердили что около четырех миллиардов лет назад на Марсе происходили "мега-потопы невообразимой силы". Подобные потопы могли, возможно, возникнуть из-за удара крупного метеорита.
Марсоход, исследуя кратер Gale, обнаружил геологические следы наносов в результате этих потопов, что стало новым открытием, поскольку прежние марсоходы и зонды их не заметили. Русла, проложенные этими потопами, достигают высоты в 10 метров и ширины в 150 метров.
Удар метеорита, по мнению ученых, мог освободить залежи метана и углекислого газа и создать краткосрочный парниковый эффект, который нагрел планету и растопил льды, на время создав климатические условия, гораздо ближе к земным, чем как до, так и после этого удара. Это также привело бы к созданию большого количества облаков и сильнейших ливней.
"Ранний Марс был геологически крайне активен", считают ученые. "Жизнь, определенно, могла бы на нем существовать. Существовала ли она на самом деле? Мы надеемся, что следующий марсоход Perseverance поможет дать ответ на этот вопрос".
Марсоход Perseverance - близнец Curiosity - был запущен 30 июля этого года, и достигнет красной планеты 18 февраля 2021 г.
Представьте, что каждый ваш страх — это невидимый монстр в бесконечном доме. Сможете ли вы найти выход и освободиться? Сегодня есть возможность узнать ответ — в нашей новой игре!








