Большая дизель-электрическая подводная лодка Б-396 "Новосибирский комсомолец" проекта 641Б (шифр "Сом", по классификации НАТО - Tango) относится к лодкам 2−го поколения, спроектирована в ЦКБ-18, ныне ЦКБ МТ "Рубин", главный конструктор проекта - З.А.Дерибин, с 1974 года - Ю.Н.Кормилицын.
Подводная лодка была заложена в 1979 году в Нижнем Новгороде (в то время - г. Горький) на заводе "Красное Сормово".
С 1980 года по 1998 год подводная лодка несла боевую службу в составе эскадры Северного Флота, выполняла задачи в Атлантическом океане у западного побережья Африки, в Средиземном море, осуществляла боевое патрулирование по охране государственной границы в Баренцевом море.
В 1998 году подводная лодка Б-396 была списана и выведена из состава ВМФ России. 20 октября 2000 года из г. Полярный она была доставлена в г. Северодвинск на Северное машиностроительное предприятие, в апреле 2001 года поднята на слип и затем переведена в цех для переоборудование в музей.
4 июля 2003 года в торжественной обстановке состоялся спуск подводной лодки-музея на воду. В конце августа корабль отправился в свой последний переход по маршруту Северодвинск-Москва. Пройдя Белое море, Беломорско-Балтийский канал, Онежское озеро, Волго-Балтийский канал, Рыбинское водохранилище, Канал имени Москвы, подводная лодка прибыла в Москву.
Теперь местом её постоянной стоянки стал Музейно-мемориальный комплекс истории ВМФ России, расположенный на Химкинском водохранилище в парке "Северное Тушино".
Вход в подводную лодку в музейном варианте осуществляется с правого борта через специально оборудованный тамбур.
До переоборудования вход экипажа осуществлялся через люк.
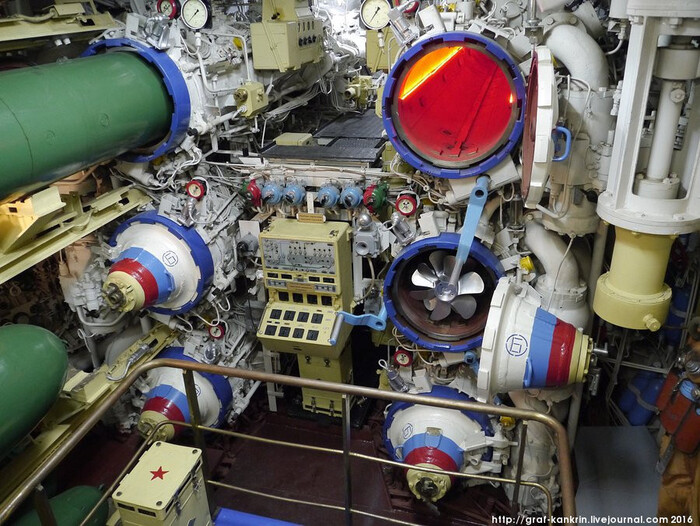
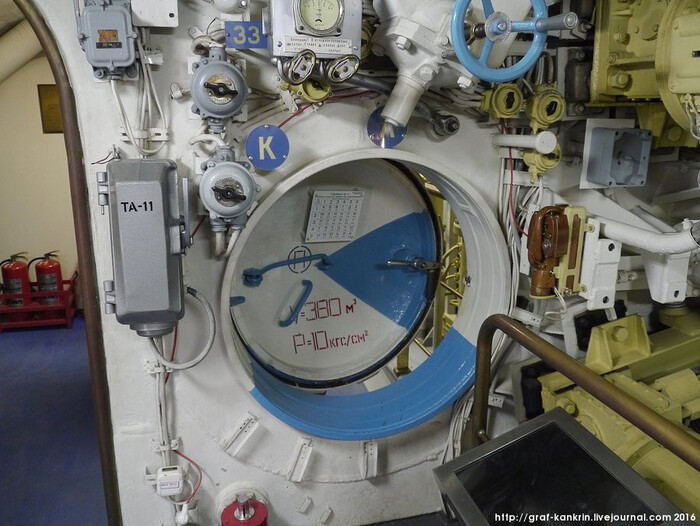
В первом отсеке расположены носовые торпедные аппараты калибра 533 мм. Справа виден винт торпеды, слева - торпеды до загрузки в торпедный аппарат.
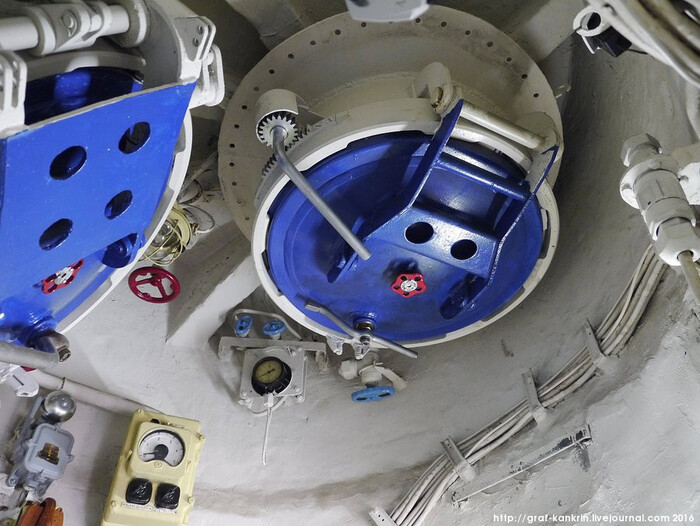
В случае необходимости экипаж мог покинуть подводную лодку через торпедные аппараты, выполнявшие функцию шлюзовых камер. Для выполнения работ за бортом или аварийного всплытия на её борту имелись комплекты снаряжения подводника ССП-К1, состоящие из изолирующего дыхательного аппарата (ребризера) ИДА-59 и гидрокомбинезона СГП-К, дополнительно, для обеспечения всплытия с больших глубин (до 220 м) в комплект входил баллон ДГБ с гелием (в составе дыхательных смесей для глубоководных погружений воздух заменяется гелий-кислородной смесью, что даёт возможность избежать азотной интоксикации и снизить риск возникновения кессонной болезни).
В интерьере подводной лодки есть изменения, в частности, оборудованы проемы в герметичных переборках между отсеками лодки для беспрепятственного перемещения посетителей. В период несения боевой службы члены экипажа перемещались между отсеками через люки.
Офицерская каюта.
Каюта командира подводной лодки.
Каюта врача.
Изолятор.
Центральный пост.
Штурманская рубка.
Радиорубка.
Камбуз. Советским подводникам в море полагалось трёхразовое питание: завтрак (именуемый также утренним чаем), обед и ужин. Первый в сутки приём пищи был наиболее лёгким из всех. Обязательными элементами завтрака был чай с сахаром и белый хлеб со сливочным маслом. Самым обильным был второй в сутки приём пищи. Традиционным первым блюдом был флотский борщ со свежей капустой, готовились также супы - фасолевый, картофельный и рисовый. Вторые блюда представляли собой различные мясные консервы с гарниром из риса, гречневой каши, фасоли или картофельного пюре. Третьим блюдом был флотский компот, который иногда заменялся какао или киселём. В автономном плавании к обеду в обязательном порядке подавалось сухое красное вино, как правило, из сорта винограда "Каберне-совиньон" по 50 мл на каждого члена экипажа. На ужин, как правило, был отварной или жареный картофель, гречневая каша, фасоль с маринованной сельдью, рыбными или мясными консервами, какао с печеньем.
Гальюн.
Кубрик оборудован в кормовом отсеке. В свободное время матросы могли посмотреть кинофильм.
Подводная лодка установлена на подводное гидротехническое основание, корабль приподнят на 4 метра, что сделало открытым для обозрения винто-рулевой комплекс.
Подводная лодка несёт гюйс Военно-морского флота России.
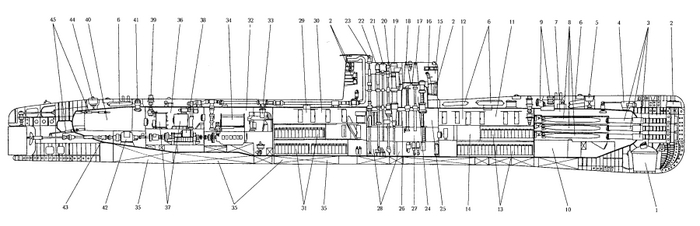
Схема подводной локи проекта 641Б
1 - основная антенна ГАК "Рубикон", 2 - антенны ГАК "Рубикон", 3 - 533-мм ТА, 4 - носовой горизонтальный руль с механизмом заваливания и приводами, 5 - носовой аварийный буй, 6 - баллоны системы ВВД, 7 - носовой отсек (торпедный), 8 - запасные торпеды с устройством быстрого заряжания, 9 - торпедопогрузочный и носовой люки, 10 - агрегатная выгородка ГАК "Рубикон", 11- второй (носовой жилой и аккумуляторный) отсек, 12 - жилые помещения, 13 - носовая (первая и вторая) группа АБ; 14 - выгородка батарейных автоматов, 15 - ходовой мостик, 16 - репитер гирокомпаса, 17 - перископ атаки, 18 - перископ ПЗНГ-8М, 19 - ПМУ устройства РДП, 20 - ПМУ антенны РЛК "Каскад", 21 - ПМУ антенны радиопеленгатора "Рамка", 22 - ПМУ антенны СОРС МРП-25, 23 - ПМУ антенны "Тополь", 24 - боевая рубка, 25 - третий (центрального поста) отсек, 26 - центральный пост, 27 - агрегатные выгородки РЭВ, 28 - выгородки вспомогательного оборудования и общесудовых систем (трюмных насосов, насосов общесудовой системы гидравлики, преобразователи и кондиционеры), 29 - четвертый (кормовой жилой и аккумуляторный) отсек, 30 - жилые помещения, 31 - кормовая (третья и четвертая) группа АБ, 32 - пятый (дизельный) отсек, 33 - вспомогательные механизмы, 34 - ДД, 35 - топливные и топливно-балластные цистерны, 36 - шестой (электромоторный) отсек, 37 - электрощиты, 38 - ГГЭД средней линии вала, 39 - кормовой якорный шпиль, 40 - седьмой (кормовой) отсек, 41 - кормовой люк, 42 - ГЭД экономического хода, 43 - средняя линия вала, 44 - кормовой аварийный буй, 45 - приводы кормовых рулей.
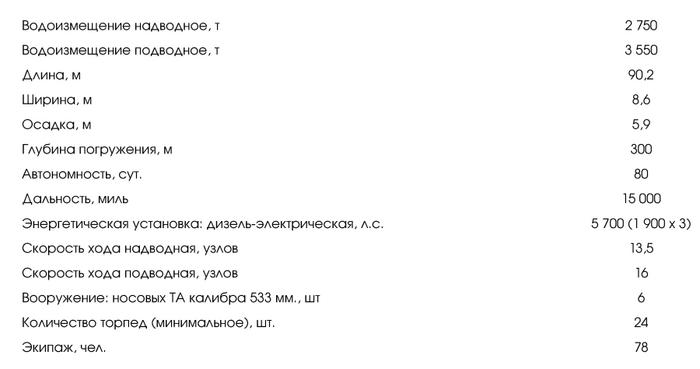
Тактико-технические данные подводной локи проекта 641Б
Познавательные посты и видео о том как устроены вещи, как работают и как это сделано публикуются в сообществе Как это сделано, присоединяйтесь, там много интересного!
Ролики на производственную тематику собираю здесь - Как это сделано Познавательные посты и видео о том как устроены вещи, как работают и как это сделано публикуются в сообществе Как это сделано, присоединяйтесь, там много интересного!
Один из самых больших в мире транспортных самолетов и, пожалуй, самый необычный и запоминающийся Боинг B-377 Супер Гуппи. Впервые поднялся в небо в сентябре 1962 года, когда все авиационные инженеры и конструкторы однозначно говорили - такой самолет никогда не полетит. Несмотря на однозначные заявления экспертов, Джон Конрой продолжил создание "беременного" самолета длиной 43 метра, размахом крыльев 47 метров, грузоподъемностью 24 тонны и полезным объемом транспортного отсека в 1100 кубических метров. Благодарю @sm2012 за донат
1. В 1960-е года НАСА развернула на полную мощность программу "Сатурн", но перед инженерами встала техническая проблема - создавая ракеты никто не думал о логистических вопросах. Таким образом ступени ракет должны были путешествовать из Калифорнии от заводов-изготовителей морским путем через Панамский канал во Флориду, а затем на площадку сборки. Помимо потери массы времени (ракеты путешествовали 18-20 дней), очень часто компоненты ступеней доставлялись в поврежденном виде.
2. Джон Конрой решил создать объемный транспортный самолет, и купив списываемые в тот момент Боинги B-377, приступил к работе. Первым делом Конрой удлинил фюзеляж самолета путём вставки вырезанного фюзеляжа с другого самолета. Сделав несколько тестовых полетов и убедившись в том, что самолет чувствует себя в полёте хорошо, Конрой сделал надстройку над фюзеляжем в той форме, в которой мы видим самолет сегодня. Первоначально надстройка эта была фальшивой и закреплялась на оригинальном фюзеляже самолета только для аэродинамических испытаний.
3. Первый испытательный полет "беременного" самолета состоялся 19 сентября 1962 года и после 50 часов налёта с мешками, загруженными песком, Конрой доказал всем, что такой самолет летать все-таки может. Наконец наступила самая последняя часть создания самолета - Конрою предстояло разрезать оригинальный фюзеляж самолета и соединить его с надстройкой, как единое целое, чтобы получить грузовой отсек требуемого объёма для перевозки ступеней ракет.
4. Когда все работы были закончены, стоимость самолета перевалила за $1 млн. долларов и у Конроя начались серьезные проблемы с финансированием проекта. В этот момент инженеры НАСА наконец-то поверили в то, что самолет действительно полетит и подписали первый контракт с Конроем на доставку двух ступеней по программе Сатурн IV на период с 28 мая по 30 июня 1963 года. Так родился Гуппи.
5. После успешной доставки, перед агентством НАСА встала новая проблема. Программа Сатурн IV-B имела ступени большего размера: 12 метров длиной и 5 метров в диаметре. Конроя это не смутило и он начал создание нового самолета который было решено назвать Супер Гуппи. Но к техническим требованиям Боинг B-377 уже не подходил, т.к. самолет должен был поднимать вдвое больше веса и иметь больший объем. Решено было, что фюзеляж, крылья и двигатели заимствуют от Боинга C97-J, а кабину оставить от самолёта B-377.
6. В начале 1966 года Супер Гуппи начал работу для НАСА и продолжает ее по сей день. Из всех построенных Гуппи, самолёт под номером N941NA - единственный, который остался в активной работе и на данный момент является собственностью НАСА. Все остальные самолеты находятся в музеях.
Ролики на производственную тематику собираю здесь - Как это сделано Познавательные посты и видео о том как устроены вещи, как работают и как это сделано публикуются в сообществе Как это сделано, присоединяйтесь, там много интересного!
В данной статье хочу поделиться с читателями информацией об устройстве и основном принципе действия современного рыбо-поискового эхолота.
Рассказать о его основном принципе работы и отразить решаемые задачи с помощью этого замечательного устройства, применяемого в области промышленного рыболовства.
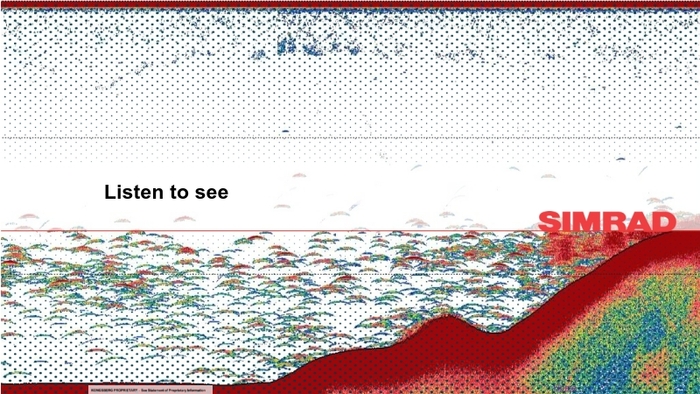
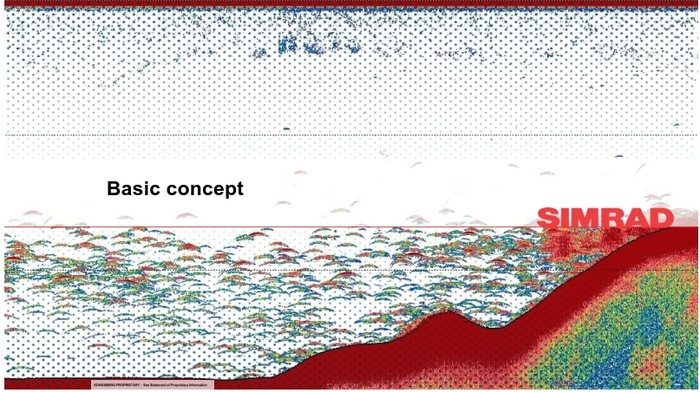
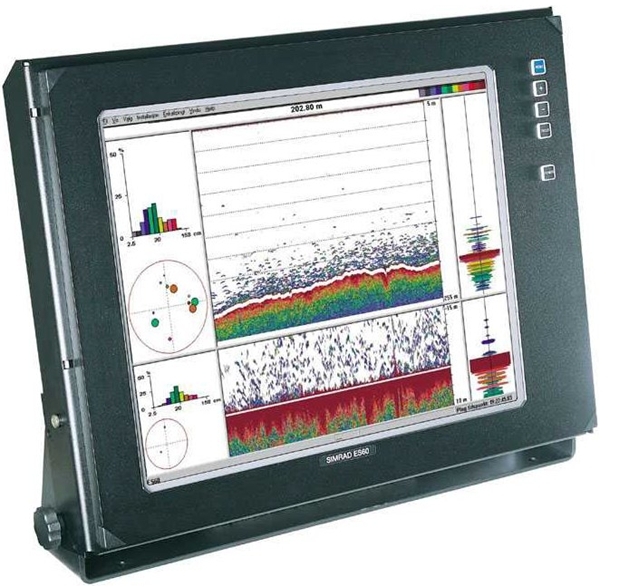
Пример отображения информации эхолотом.
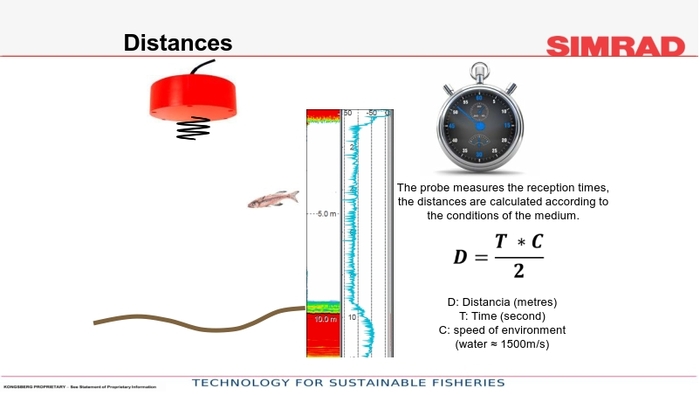
Эхолот.
Основу эхолота составляет приёмопередатчик, который посылает звуковые импульсы в требуемом направлении, а также принимает отражённые импульсы, если посылка, встретив на своём пути какой-либо объект, отразится от него.
Эти посылки и отражённые сигналы после особого преобразования звучат очень похоже на то, как произносится слово «пинг».
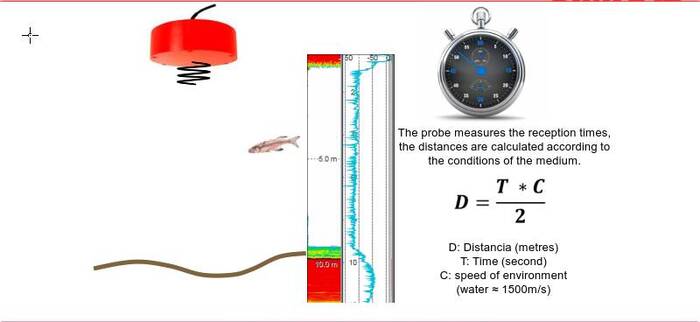
Вращая антенну подобно прожектору, можно определить направление, в котором послан «пинг», а следовательно, и направление объекта, от которого «пинг» отражён. Замерив промежуток времени между посылкой импульса и приёмом отражённого сигнала, можно определить расстояние до обнаруженного объекта. Этот процесс называется эхолокацией.
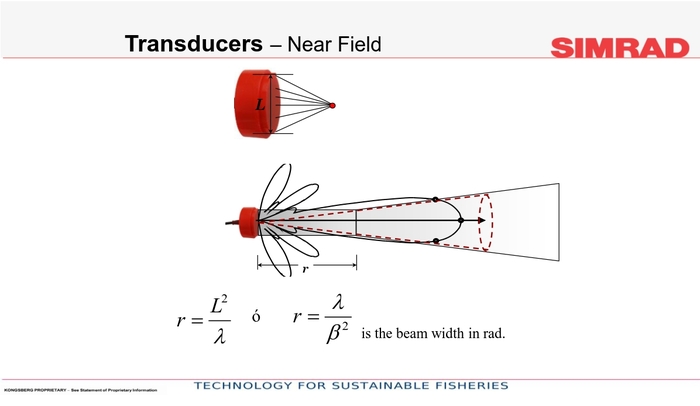
Измерение расстояния представлено формулой.
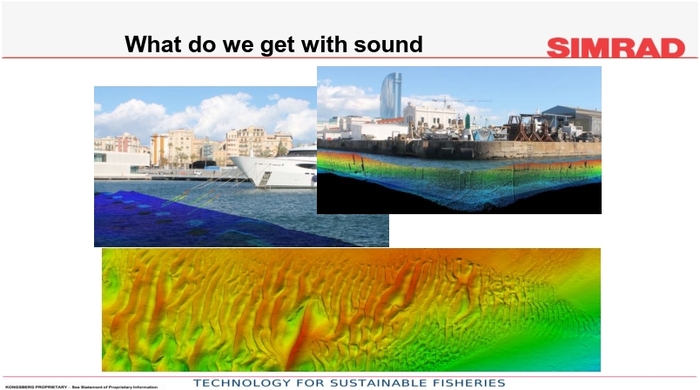
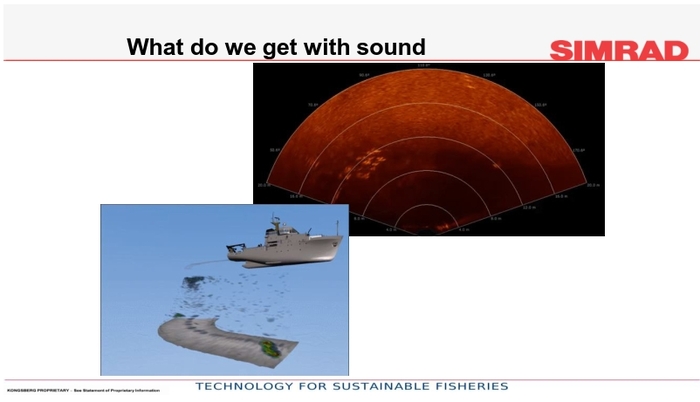
Эхолот - можно классифицировать как средство обеспечения рыболовства и промысла морских животных используемое для поиска объектов промысла, оценки их скоплений и запасов, наведения на них орудий лова, а так же контроля за состоянием этих орудий и т.п
Современный эхолот помимо задач описанных выше применяется для измерения глубины моря а так же для исследования рельефа дна водного бассейна.
Так как эхолот решает сразу несколько задач то его можно отнести и к гидролокационным станциям.
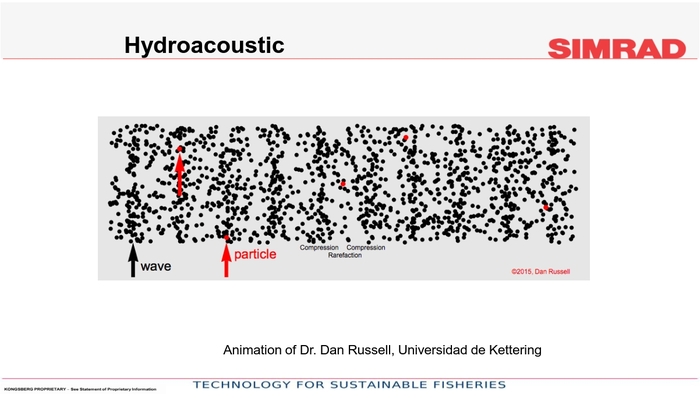
Распространение волн
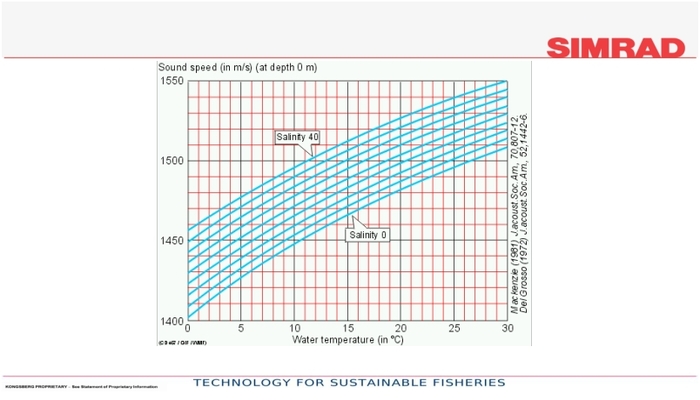
Скорость распространения звуковых волн в морской воде зависит от температуры, солёности и давления воды. Скорость на мелководье колеблется в пределах от 1440 до 1520 м/с. На глубине 1000 м эта скорость составляет примерно 1480 м/с. В пресной воде на мелководье она равна приблизительно 1430 м/с.
Излучение импульсов
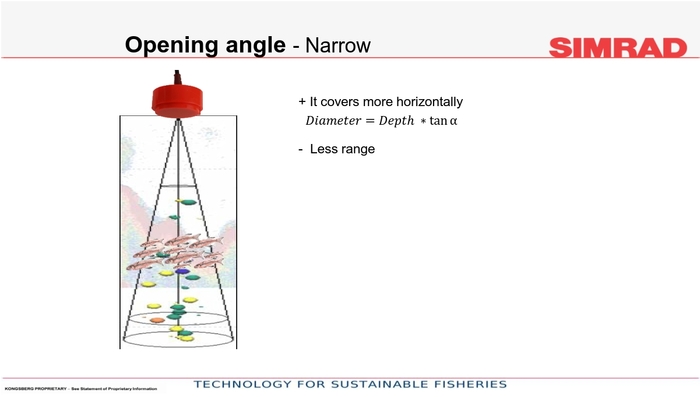
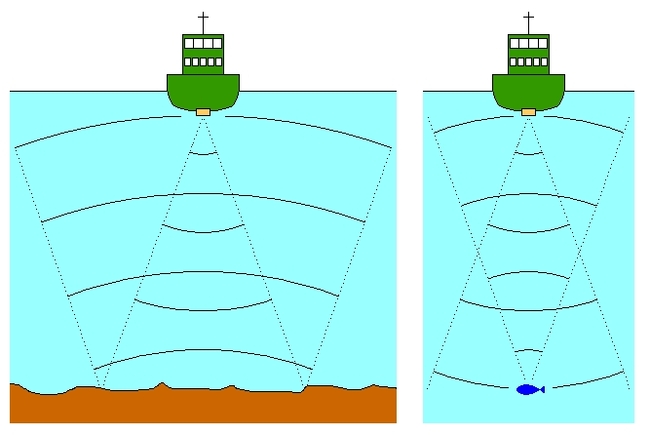
Эхолот излучает импульсы звуковых волн высокой энергии. Эти волны отражаются от плоского твёрдого грунта, как от зеркала. Энергия звуковых волн охватывает всё большие и большие зоны по мере их дальнейшего распространения к грунту и обратно к поверхности.
Энергия излучения распространяется в четыре раза большем пространстве при удвоении дистанции сканирования.
Аналогично происходит отражение звуковые волны и от больших и плотных косяков рыбы. Этот тип распространения звуковых волн относится к квадратичному закону 20 log TVG - временная регулировка усиления.
Немного иначе обстоит дело при отражении звуковых волн от отдельной рыбы. Излученная звуковая волна подчиняется квадратичному закону распространения при её движении от поверхности к рыбе. Воздушный пузырь рыбы рассеивает часть энергии излучения во всех направлениях. Рассеянная отраженная волна, движущаяся обратно от рыбы к поверхности, подчиняется отличному от квадратичного закона распространения. Этот объединенный эффект относится к закону учетверения -40 log TVG.
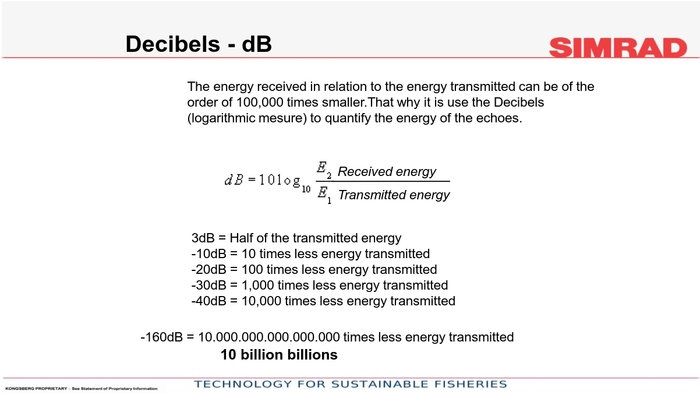
Потери за счёт поглощения при распространении звука намного больше в морской воде, чем в пресной. Поглощение увеличивается и с увеличением частоты излучающего импульса. При частоте 38 кГц поглощение составляет 0,5 дБ/км в пресной воде и 10 дБ/км в морской воде. При частоте 200 кГц поглощение составляет 10 дБ/км в пресной воде и 50 дБ/км - в солёной.
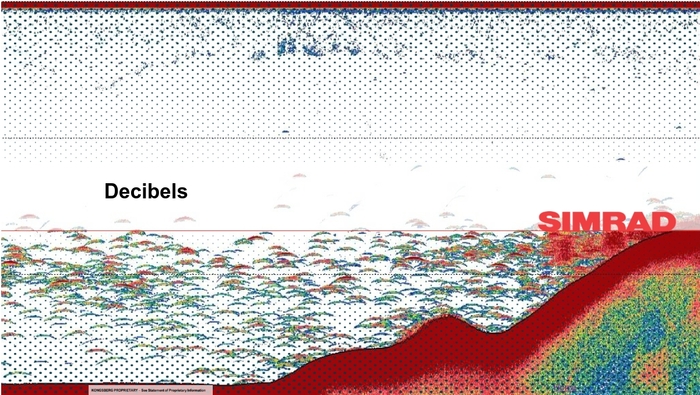
Единицы измерения dB (децибелы) традиционно используются в гидроакустике и других областях физики и является логарифмическим измерением отношения между двумя величинами.
Для правильной компенсации потерь описанных выше, в эхолоте, необходимо учитывать тип воды.
график зависимости скорости звука в воде от температуры и солёности воды.
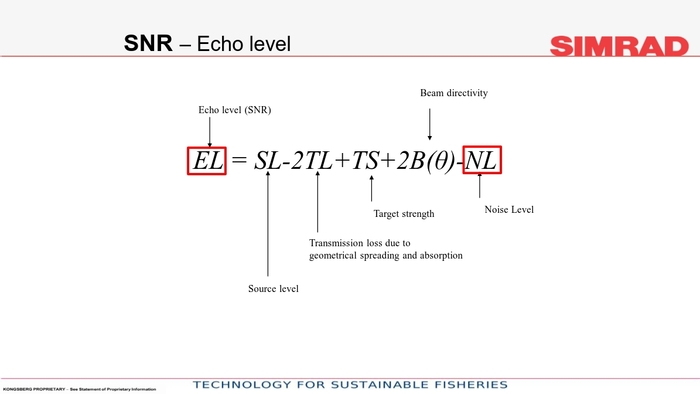
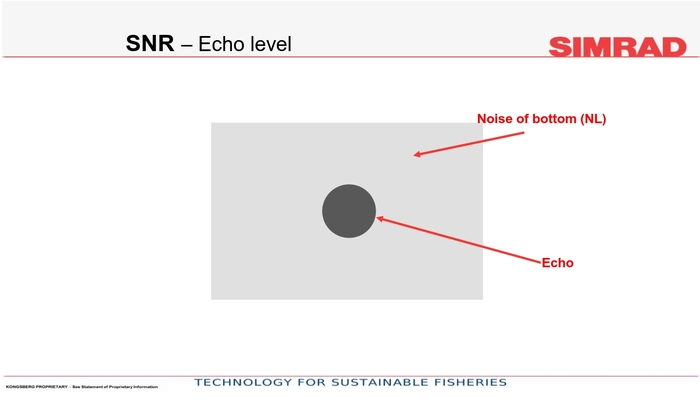
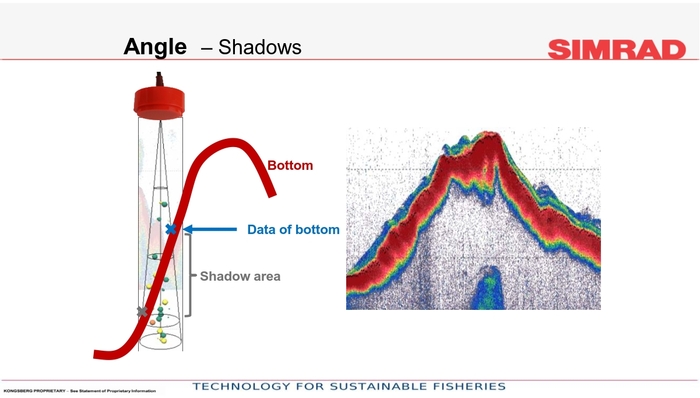
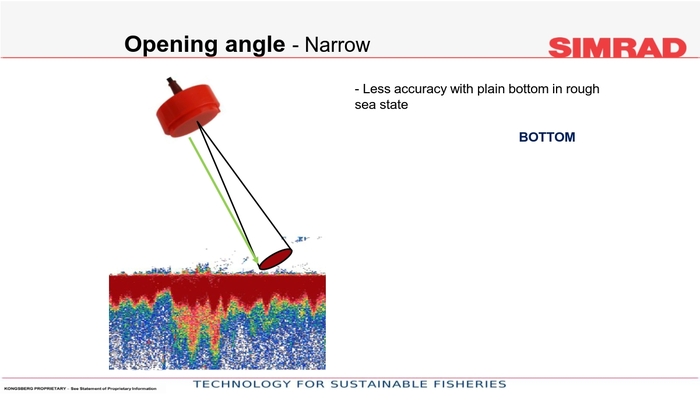
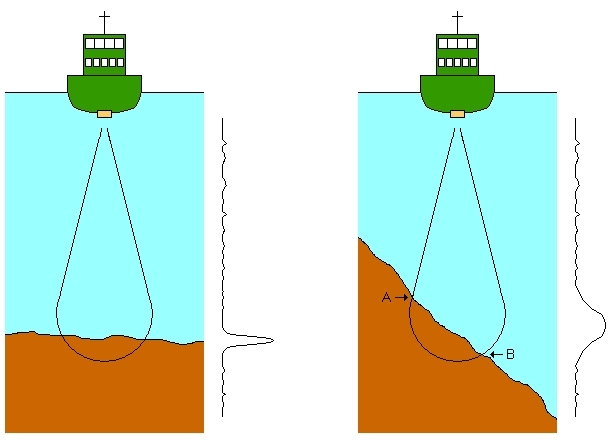
Эхо сигналы от грунта
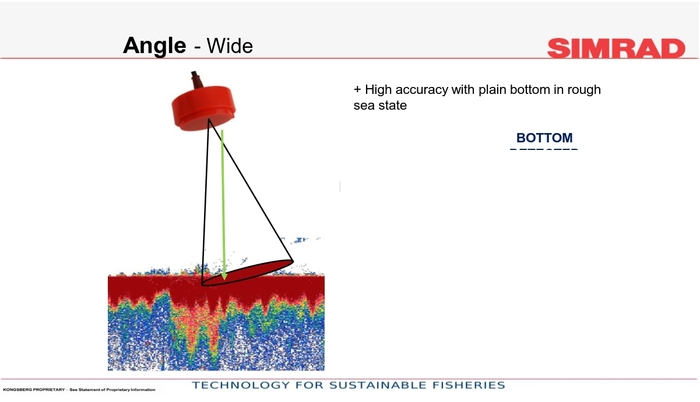
Твёрдый плоский грунт отражает эхо-сигналы, как зеркало. Сканирующий импульс достигает дна практически мгновенно, и эхо-сигналы от различных частей грунта также практически мгновенно возвращаются обратно к поверхности. Принятые эхо-сигналы представляют собой, главным образом, ослабленные копии коротких импульсов посылки.
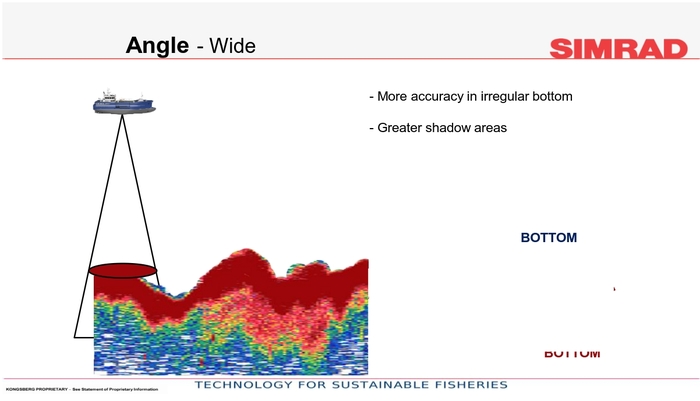
Эхо-сигналы от наклонного грунта характеризуются большей длительностью и более медленным нарастанием и спадом. Сканирующий импульс сначала достигает уклона в точке A , и по истечении времени место отражения перемещается по уклону по направлению к точке B. Твёрдый и прочный грунт не даёт много отражений. Часто грунт состоит из слоёв ила, глины и песка, которые на дисплее эхолота выглядят в виде цветных полос.
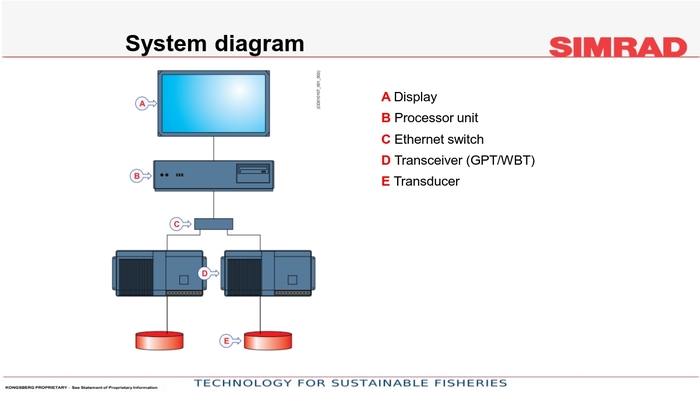
Основные блоки Эхолота
Рыболовный эхолот включает в себя следующие основные блоки:
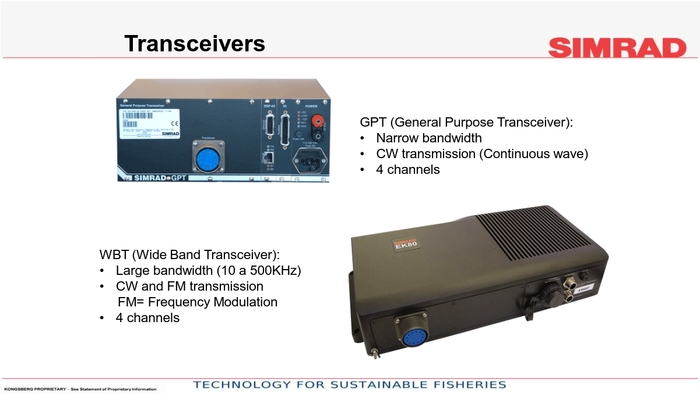
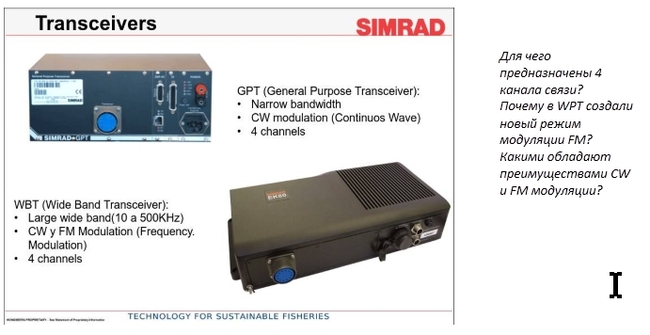
Трансивер общего назначения - GPT
Трансивер GPT - это небольшой многофункциональный автономный блок, устанавливаемый на борту судна. Обычно он устанавливается поблизости от гидроакустического преобразователя для минимизации наводок электрических помех на кабель гидроакустического преобразователя.
Tрансиверы выпускаемые компанией Simrad
В корпусе трансивера GPT устанавливается от одной до четырёх плат TRX передатчика/приёмника, процессор цифровых сигналов DSP, плата ввода/вывода IO, управляющая различными сигналами интерфейса, и плата электропитания. Для всех четырёх конфигураций используется один и тот же разъём для гидроакустического преобразователя.
Линия связи Ethernet соединяет GPT с процессорным блоком управления: TP (витая пара) или AUI (интерфейс подключения блока).
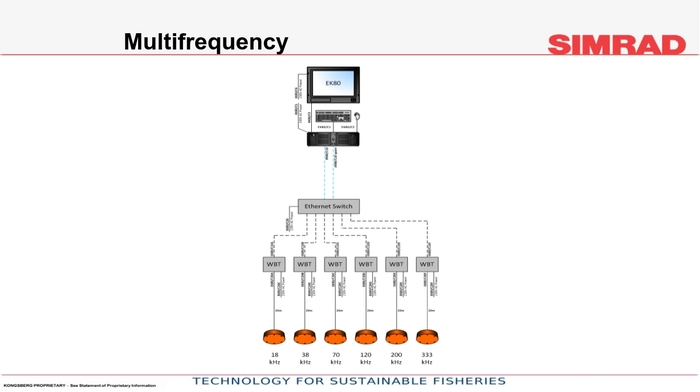
Частота на которой работает GPT определяется установкой соответствующих плат. Преобразователи могут выпускаться так же на резонансную частоту 28, 38, 50, 70, 200 кГц. Помимо этого делают передатчики и вибраторы с расщеплённым лучом. GPT передатчик c расщеплённым лучом, работает с антенной состоящей из четырёх секций.
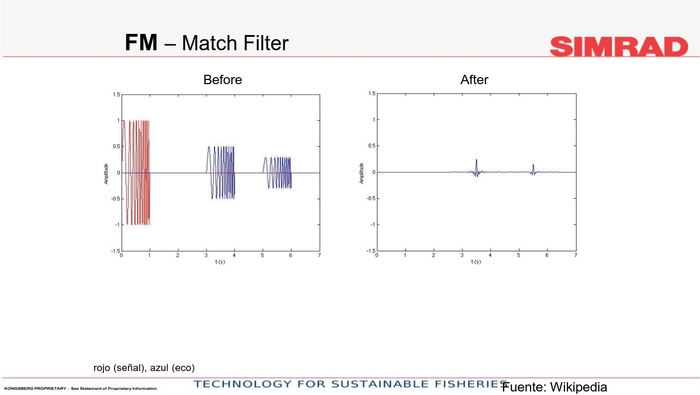
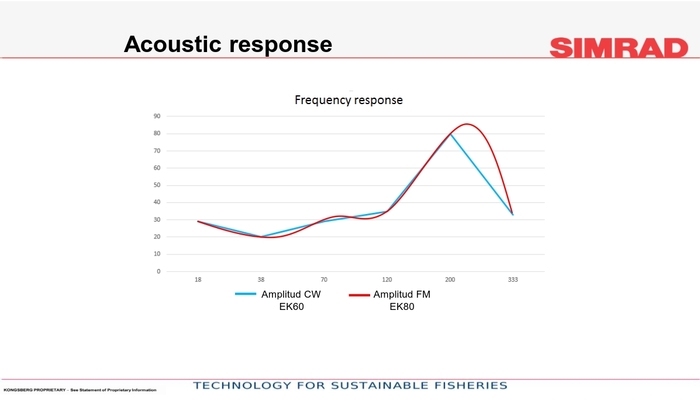
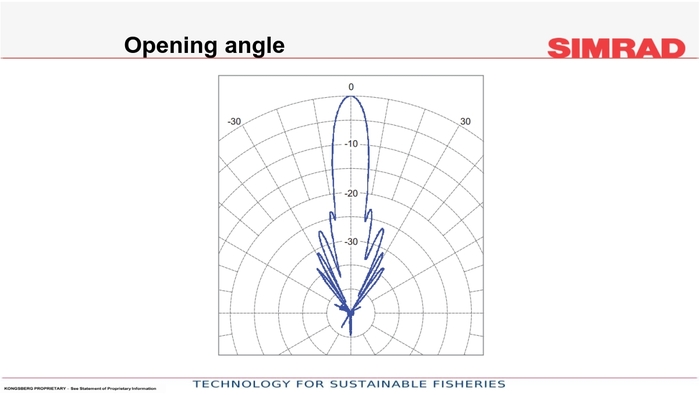
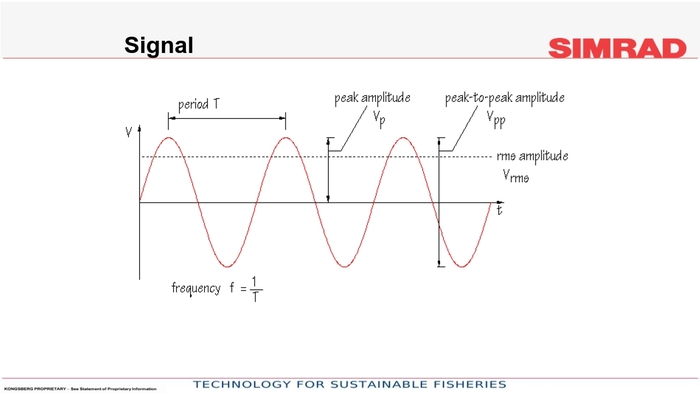
Модуляция сигнала
В большей части эхолотов применяется модуляция CW. Эхолот излучает одиночные импульсы определённой длительности и частоты. CW (Continuous Wave) – в этом режиме посылка содержит пакет импульсов равной длительности.
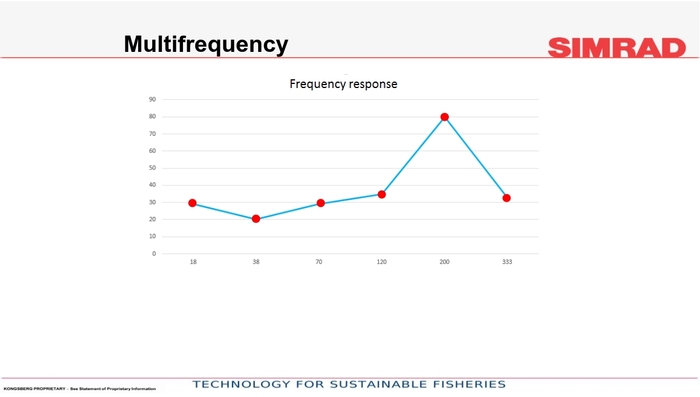
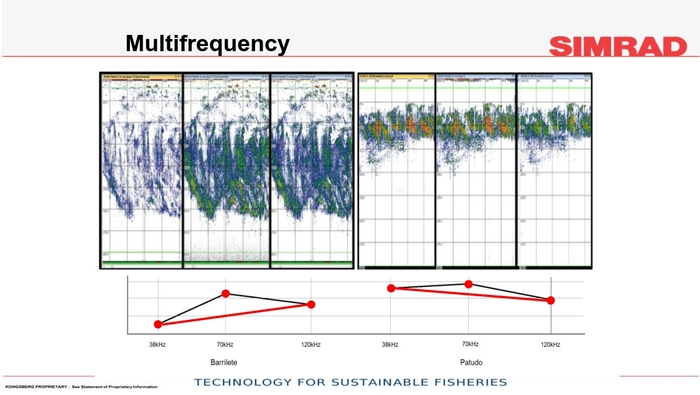
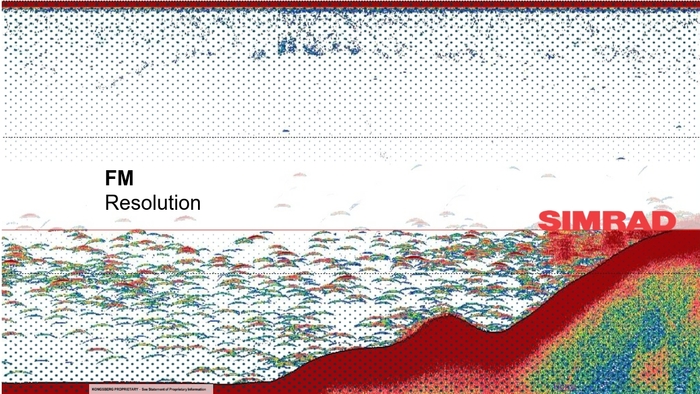
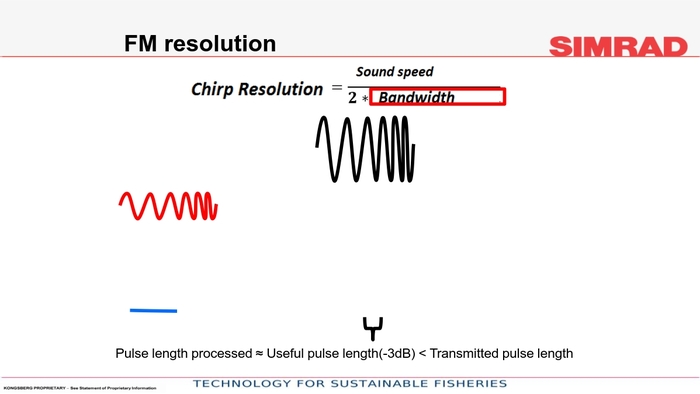
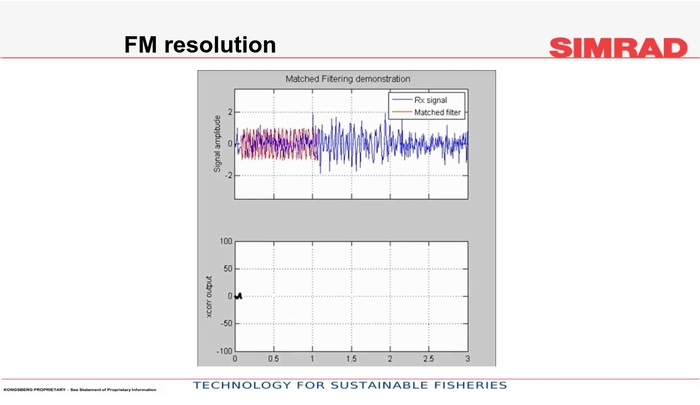
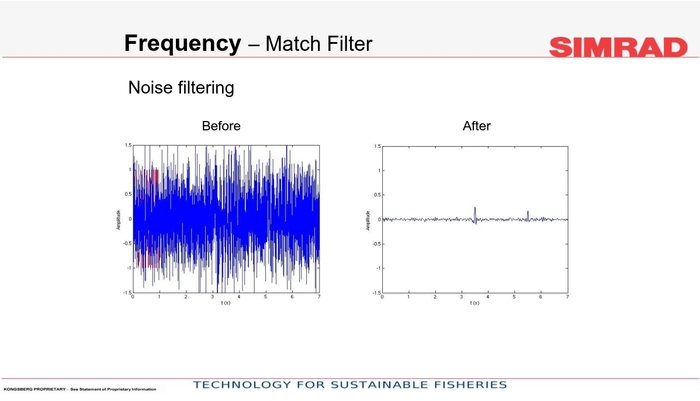
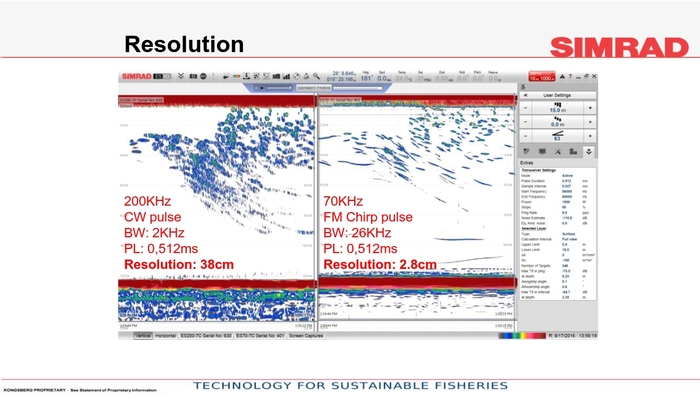
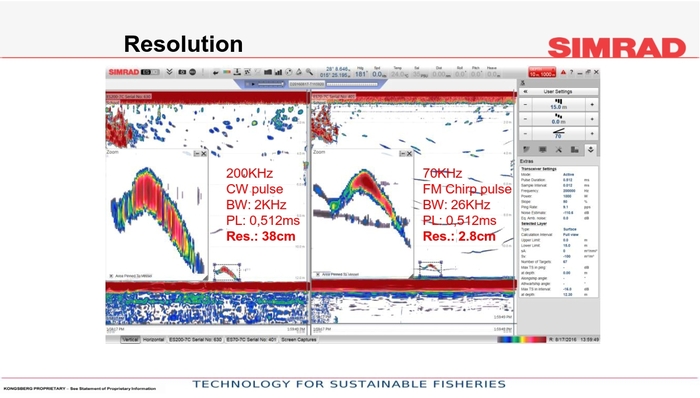
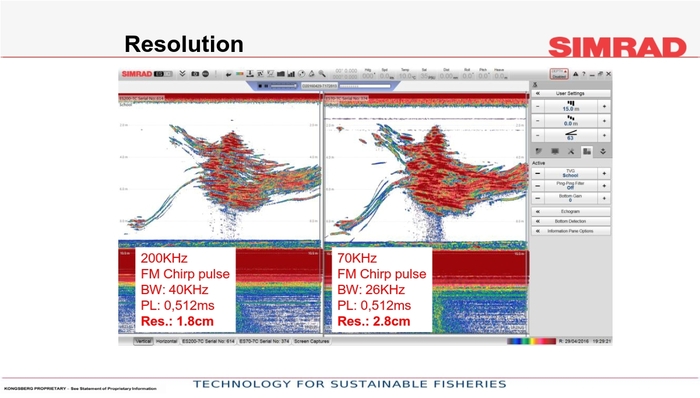
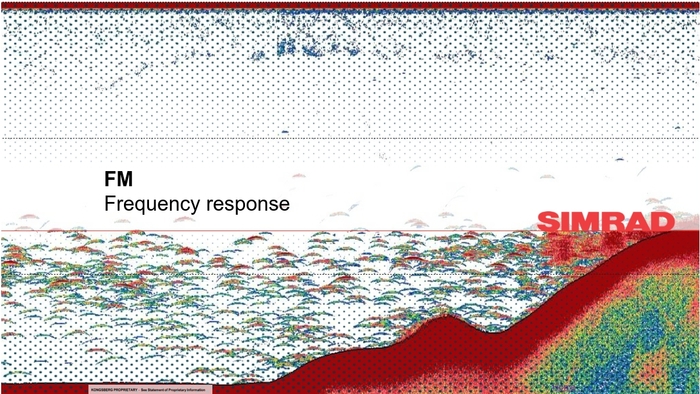
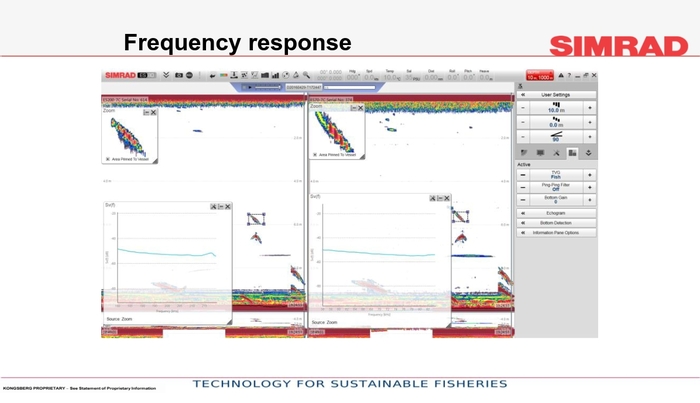
В самых современных эхолотах компании Simrad применяются передатчики WPT способные работать в режиме модуляции FM или частотной модуляции (FM—Frequency modulation) Частотная модуляция позволяет резко повысить разрешающую способность эхолота. Соотношение сигнал/шум повышается в 7 раз. Более четкое выделение объектов, высокое разрешение на больших глубинах, не зависящее от длительности импульса. Точное определение размерного ряда рыбы. Идея заключается в том что, за один пинг частота и длительность импульса может меняться в широком диапазоне.
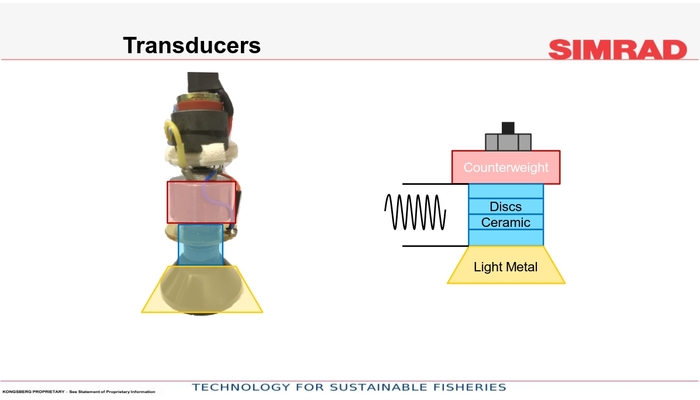
Гидроакустический преобразователь
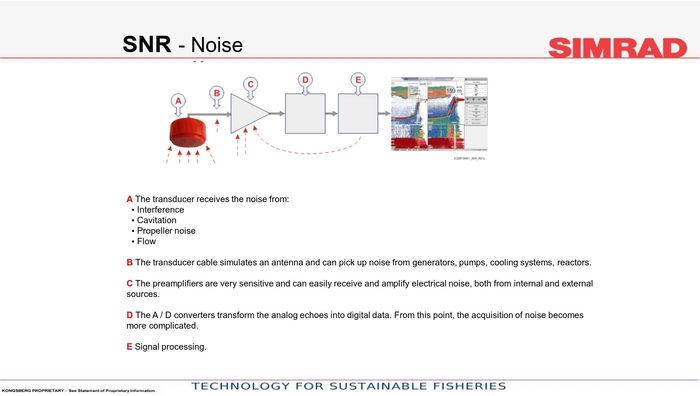
Работоспособность эхолота в большой степени зависит от расположения гидроакустического преобразователя по отношению к винтам судна и к шуму гидродинамического потока воды. Важно учитывать также помехи электрических наводок на кабель преобразователя. Необходимо принимать во внимание следующее:
Электрический кабель должен иметь металлическую экранную оплетку - для минимизации электрических помех.
Экран кабеля должен подключаться только к соответствующему штырьку разъема блока трансивера. На всем протяжении кабеля экран не должен контактировать с "землей" судна.
Корпус судна может выполнять роль экрана между винтом и гидроакустическим преобразователем, таким образом, шумовая составляющая от винтов уменьшается за счет выбора месторасположения преобразователя. Поэтому преобразователь должен устанавливаться на расстоянии не более 1/3 длины судна (считая от носа), на той стороне корпуса, где лопасти винта движутся вверх. Кроме того, немного наклоните преобразователь таким образом, чтобы зона рабочей поверхности преобразователя была ниже уровня киля винта.
Винт не должен иметь повреждений. Для минимизации кавитационных помех, винт должен иметь гладкую поверхность. Эти помехи уменьшаются также за счет достаточно большого расстояния между лопастями винта и корпусом судна.
Для уменьшения гидродинамических помех непосредственно у киля, гидроакустический преобразователь необходимо устанавливать на расстоянии не менее 0,6м от киля на судах короче 20 м, и на расстоянии не менее 1м от киля на более протяженных судах.
Для эхолотов с двумя или тремя каналами, преобразователи должны устанавливаться в одном и том же месте для уменьшения интервалов поглощения сигналов, следующих за моментом излучения сигнала одного из преобразователей.
Следует избегать выступающих частей труб и острых кромок около преобразователей.
Величину гидродинамических помех можно уменьшить за счет заострения носовой части судна.
После установки, преобразователь необходимо покрасить высококачественной антикоррозионной краской.
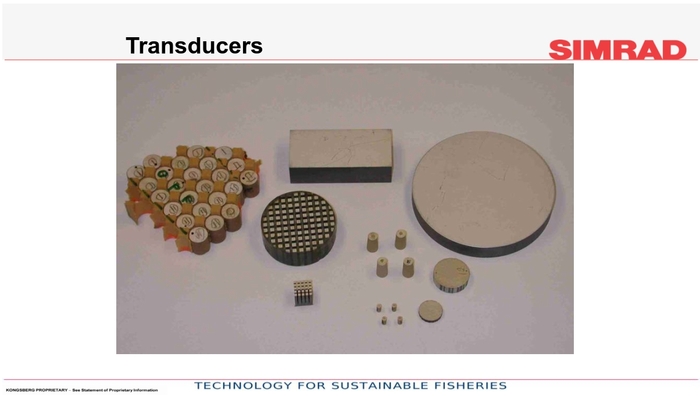
Гидроакустические преобразователи
Преобразователи делятся на активные и пассивные. Активные могут как излучать сигнал так и принимать. Пассивные в свою очередь способны только принимать эхо сигналы. Так же они могут быть узко-частотными и с широким диапазонном частот. Одно и много лучевые.
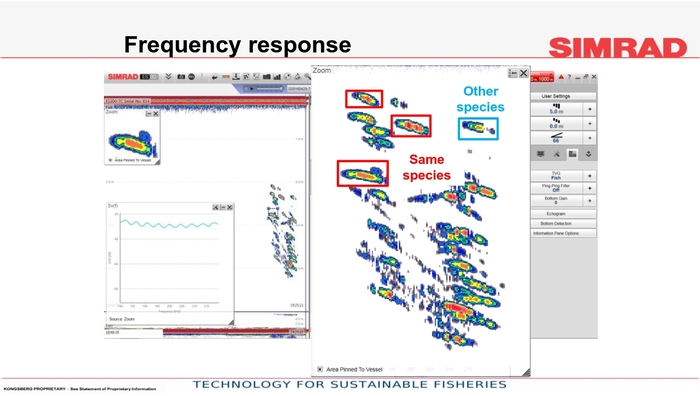
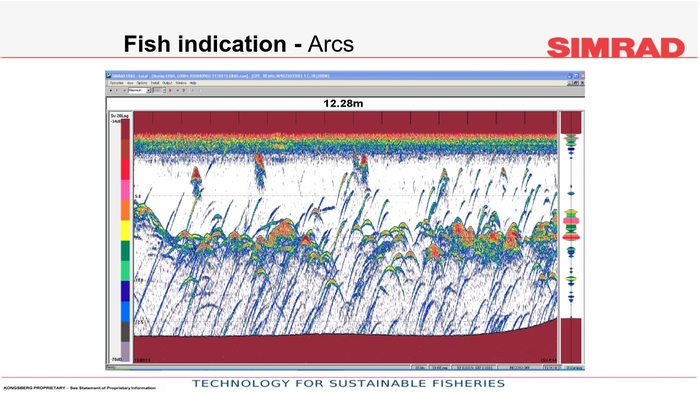
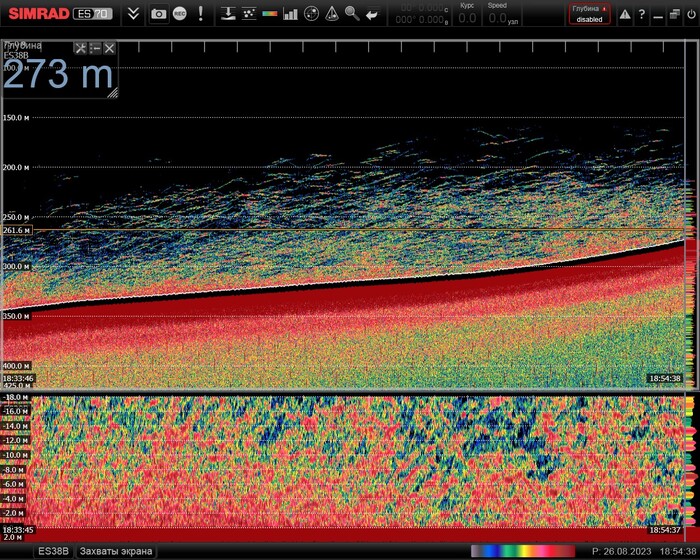
Эхограмма
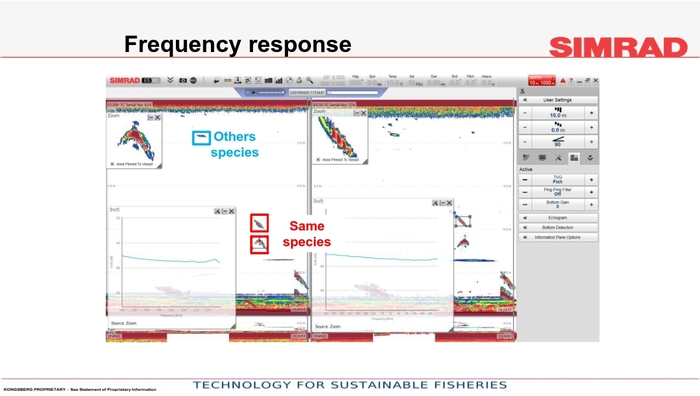
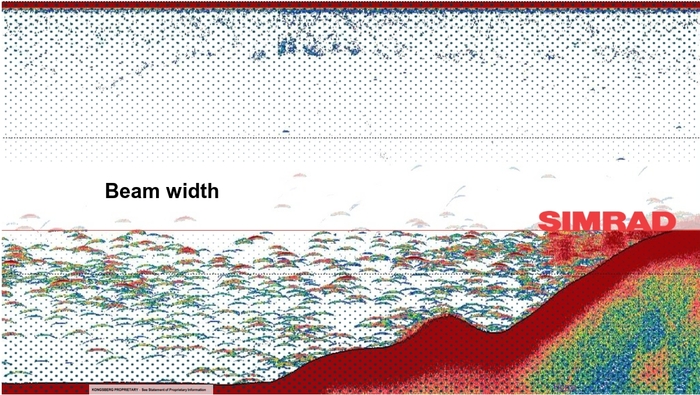
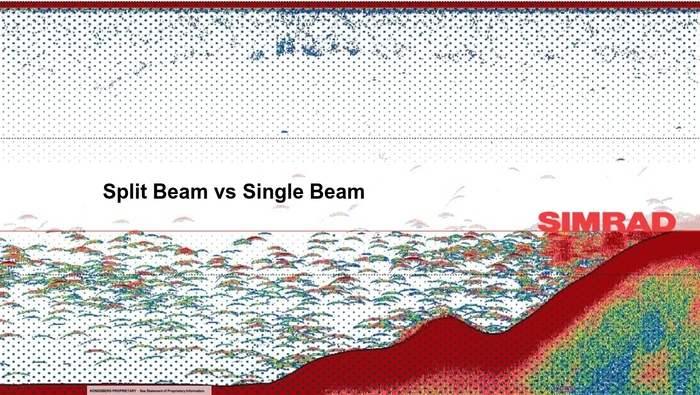
Эхограмма в программе для эхолота SIMRAD ES 70
В примере, представленном выше, изображено окно дисплея двух частотного режима. Оно содержит две эхограммы для данного частотного канала. Верхняя эхограмма отображает эхо сигналы в поверхностном слое, нижняя - придонный участок.
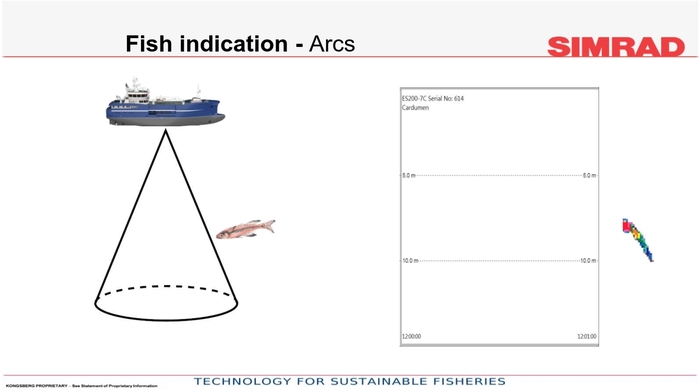
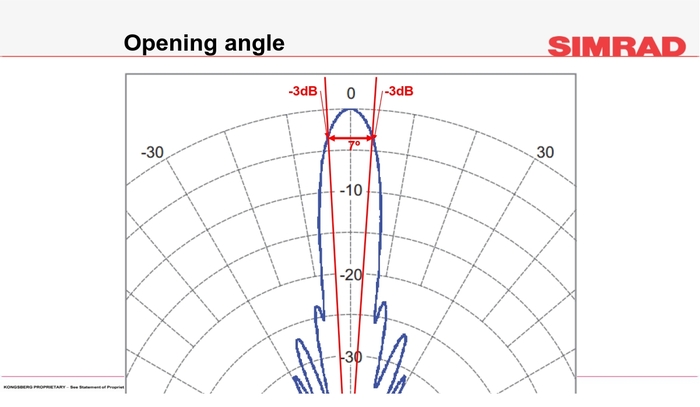
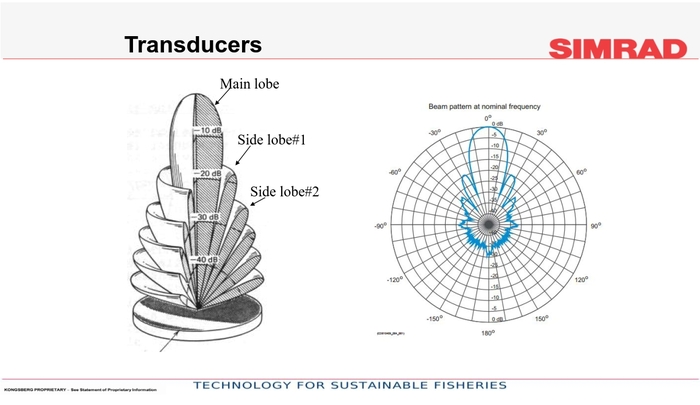
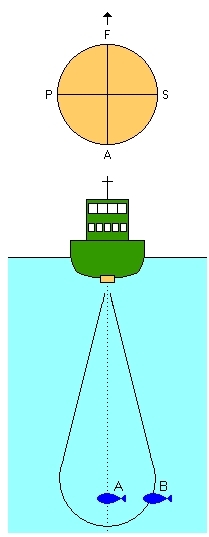
Контроль биомассы с использованием расщеплённого луча
В эхолоте может применяется гидроакустический преобразователь с расщеплённый лучом для оценки распределения отдельных особей рыбы по размерам.
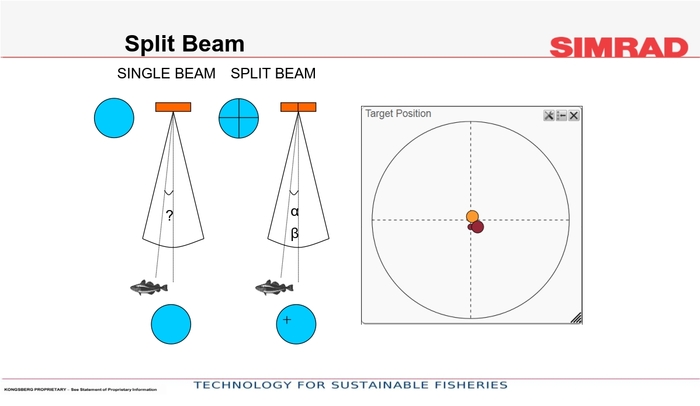
Данный преобразователь(вибратор) разделяется электрически на четыре квадранта. В процессе излучения сигнала все четыре квадранта возбуждаются параллельно. Однако принятые эхо-сигналы каждого квадранта усиливаются отдельно в четырёх соответствующих каждому каналу приёмниках, что даёт возможность фиксировать направление прибытия эхо-сигнала.
Распространяющийся по направлению к гидроакустическому преобразователю волновой фронт приходит к четырём квадрантам в различное время, что вызывает изменение фазовых углов выхода электрических сигналов из квадрантов. Продольный угол определяется по разности фаз между сигналами передней и задней частей преобразователя, а поперечный угол определяется по право - и левосторонним сигналам.
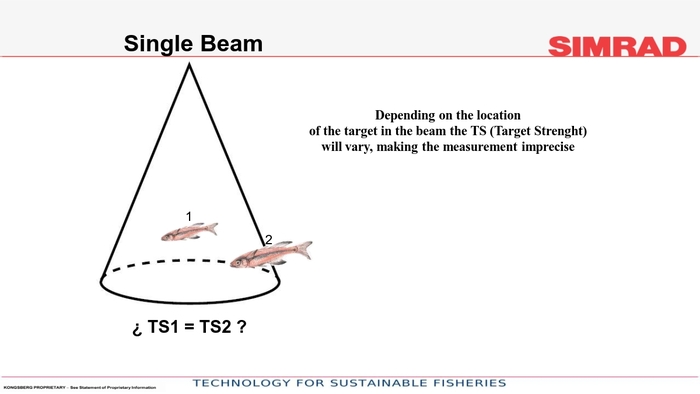
Указанная на рисунке рыба A располагается вдоль оси гидроакустического преобразователя, в зоне максимальной чувствительности эхолота, а рыба B находится ближе к краю луча, в зоне более низкой чувствительности. Очевидно, что эхо-сигналы от рыбы A будут более сильными, чем от рыбы B, даже если они одного размера и находятся на одной глубине. Следовательно, определение размера рыбы только по силе эхо-сигналов неправильно. Эхолот с расщеплённым лучом определяет положение отдельной особи рыбы в луче. Корректируется разница по чувствительности, и рассчитывается истинный размер рыбы.
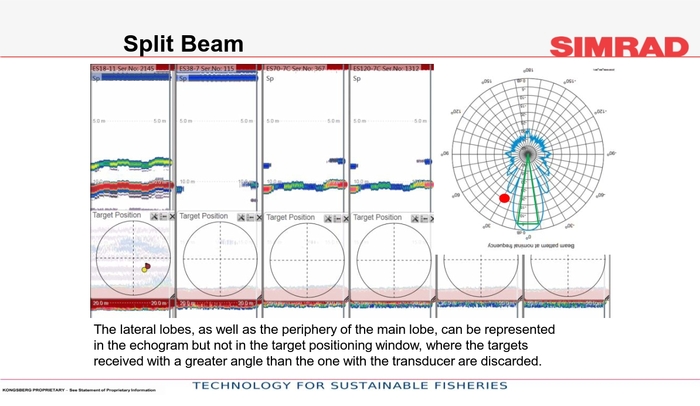
Методика измерения с помощью расщеплённого луча работает только применительно к отдельным особям рыбы, так как электрический фазовый угол будет случайным при одновременном возврате эхо-сигналов от множества различно расположенных особей. Следовательно, измерение размера особи внутри косяка рыбы не даст достоверного результата.
Усиление "Пинга"
В эхолотах используются два принципа усиления: усиление сигнала и ВАРУ (TVG).
С усилением сигнала все довольно просто, основной принцип заключен в изменении цифрового значения коэффициента усиления в трансивере эхолота.
Регулирование усиления TVG (ВАРУ) означает Time Varied Gain (изменяемое во времени усиление, вари-усиление). Общая идея TVG состоит в том, что уровень (цвет) эхо-сигналов от рыбы не зависит от глубины её расположения. Большая часть эхолотов не имеет компенсирующего ВАРУ и эта функция часто реализуется в программном обеспечении после того как эхо-сигналы приёмника преобразуются в цифровой формат.
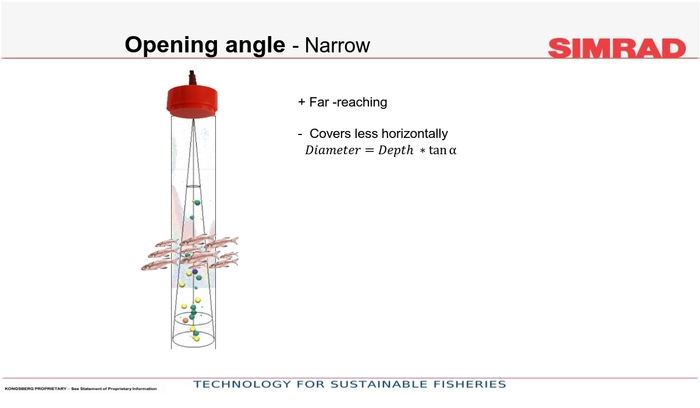
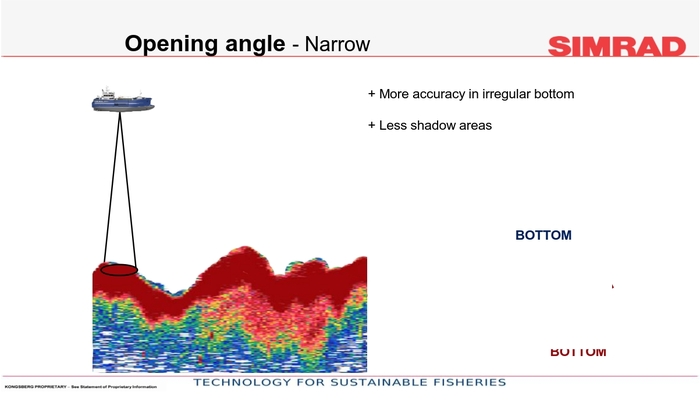
Диапазон наблюдения
В солёной воде поглощение звуковых волн существенно увеличивается с увеличением частоты. Для обеспечения наибольшего диапазона наблюдения, вы должны выбирать низкочастотный преобразователь большого размера и максимальной мощности передачи.
Типовые диапазоны наблюдения с использованием типовых преобразователей производства Simrad
Типовые диапазоны наблюдения представлены на рисунке выше. Используя гидроакустический преобразователь Simrad 27-26/21 (27 кГц,10x13 град, 3000 вт) можно видеть 60-сантиметровую треску на глубине до 800 м и грунт на глубине до 3800м. Однако с помощью гидроакустического преобразователя 200-7F (200 кГц,7x7 град, 1000 вт) можно видеть ту же самую треску только на глубине до 250 м при фиксации грунта на глубине до 500 м.
Эти величины рассчитаны, исходя из нормальной температуры (+10°C) и солёности морской воды (3.5 %), усреднённого грунта (поверхностная сила обратного рассеяния = -20 dB) и уровня помех, при движении типового судна.
Заключение
В данной статье я изложил основные принципы эхолокации, устройство эхолотов, а так же основные их функции и возможности.
Тема эхолотов довольно обширна, функций представленные в статье лишь малая часть от возможностей современных эхолотов.
Используемая литература
Евтютов А.П., Колесников А.Е., Ляликов А.П. и др. - Справочник по гидроакустике (Библиотека инженера-гидроакустика) - 1982
Инструкция по эксплуатации эхолотов Simrad ES 60
Инструкция по эксплуатации эхолотов Simrad ES 70
SIMRAD Training course 2017 - Theory of Echosounder