

Замороженный протез. Провал в ходе испытаний?
Решили провести испытания при минусовых температурах.
Что из этого вышло? Рассказываем в ролике:
Решили провести испытания при минусовых температурах.
Что из этого вышло? Рассказываем в ролике:


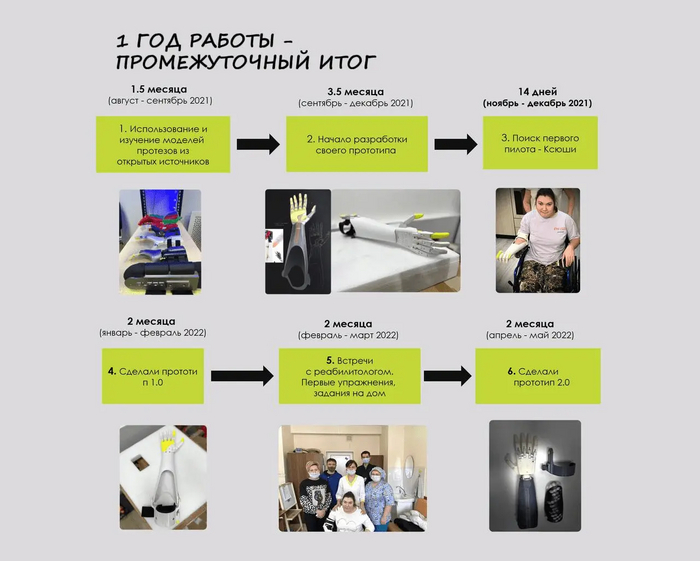
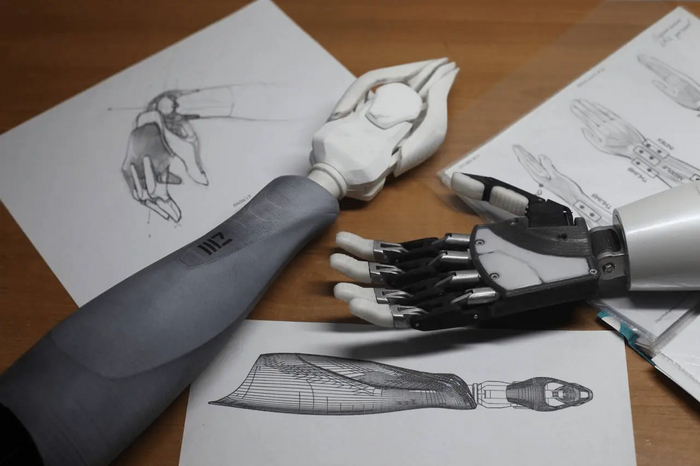
Изначально, ещё в 2021 году, наша команда начинала разработку протеза, похожего на руку человека.
Такое изделие может быть отличным косметическим вариантом для внешнего вида (за счёт пяти пальцев), но возник вопрос:
"Что оно может конкретно дать пользователю, при использовании в быту?".
Эффективность хвата, прочность и его сила – относительно низкие, поэтому, в решении бытовых задач, данные протезы практически не применимы. Опытным путём, мы пришли к роботизированному захвату и созданию сильного и стильного протеза, который точно будет выделяться и станет полезным для широкого спектра задач, таких как:
- удержание тонких предметов (нож, ложка, ручка, щётка, карточка, лист бумаги и т.д.);
- захват бутылки (1,5 л.), кружки и др.
Такое решение даёт большую свободу движения, что способствует повышению удобства в использовании.

Почему усложняется производственный процесс создания антропоморфных изделий (похожих на человеческую руку)?
1.) Механика пятипалого протеза, сила сжатия, прочность и хват не позволяют использовать его в качестве повседневного помощника (микродвигатели, занимающие до 60% от общей стоимости ТСР, часто выходят из строя в первую очередь);
2.) Отсутствие обратной связи не даёт тактильных ощущений, поэтому пользователю сложно привыкнуть к протезу. Недоступность точной информации о силе захвата приводит к трудностям при взаимодействии с хрупкими предметами.
Только в 5% случаев пользователь выполняет рекомендации специалистов. На основании имеющегося опыта создания прототипов и испытаний пятипалых изделий, мы наблюдаем, как каждая вышеприведённая проблема отражает недостаточную эффективность протезов, в результате которой, пользователь отказывается носить его каждый день. Часто изделие становится лишь “красивым” прикрытием травмы. Как же прийти к естественной мотивации учиться носить протез?


Итак, протестировав пятипалые прототипы, мы пришли к пониманию, что эти протезы не полностью закрывают базовый функционал (простые действия в быту и жизни), и начали разработку изделия, направленного на решение ежедневных задач пользователя. Какое преимущество мы нашли?
Простой и надёжный механизм с обратной связью и индивидуальном подходе в реабилитации (восстановлении после травмы) и абилитации (освоения протеза), в том числе с помощью программного обеспечения.


Проблемы, существующие на рынке, решаем за счёт:
1.) Сильной механики кисти, без дефицитных микродвигателей, интуитивным управлением, одним, но многофункциональным хватом и возможностью оперативной замены кисти;
2.) Использования вибротактильной обратной связи, чтобы пользователь смог получить базовые ощущения (например – различать наличие в кисти протеза, предмет и его физическое состояние);
3.) Разработки IT-платформы, чтобы наладить индивидуальный подход создания программы, реабилитации и абилитации пациента, возможности наблюдать за процессом обучения (для юных пользователей в игровой форме и c последующим вознаграждением).
Всё это позволяет контролировать движения кисти, от прикосновения до крепкого сжатия, что помогает в обеспечении точности и комфорта при использовании изделия в повседневной жизни.

Осваиваем токарное ремесло и делаем втулки, оси, шайбы для изделия.
Большинство внутренних узлов прототипа делаем самостоятельно.


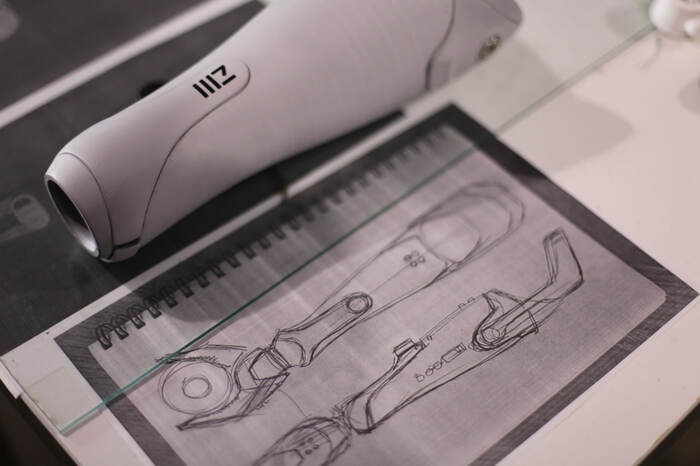
Представляем вашему вниманию первый предсерийный протез.
⚡В начале марта, мы закончили первую версию протеза.
В видео можно посмотреть первые испытания с низкими температурами.
Всю жизнь увлекался различными механизмами, больше всего впечатляли механизмы протезов, но не эти современные угрюмопротезы на 3д принтерах с сервоприводами, а механические. Так и жил год за годом лишь записывая некоторые идеи протезов в дневник, как вдруг встретил на работе (работал на стройке в бригаде подсобников) беспалого, из того что осталось на руке правой кисти выглядело примерно так:

найдено в интернете, отфотошоплено в фотошопе
На левой руке все выглядело куда печальнее, понимая что для полной функциональности потребуется минимум одна живая фаланга длинной хотя бы один сантим, решил подбодрить его одной идеей, давай говорю вкрутим тебе черные саморезы по дереву, у тебя же есть там остатки фаланг, идею он принял тепло и также тепло отказал, спорить с бывшим чемпионом мира по "камень ножницы бумага" не стал, а пошел дальше думать.
Идею конструкции решил позаимствовать у компании Naked Prosthetics из сша, которые вроде как неплохо хайпанули на своем дизайне и как бы новой технологии, которой нигде нет, возможно даже запатентовали ее, но порывшись в интернетах нашел подобные механизмы еще в журналах ссср, поэтому плюнул на их авторские права и стал тридешить первый палец.

протез пальцев Naked Prosthetics
Сделал первые зарисовки для дальнейшего проектирования, разобраться безусловно сложно, но главное что мне понятно.
После этого отпустил лучшего в мире гитариста работать дальше, а сам загасился в чайной комнате , для обсуждения с коллегами того, как же работает механизм пальцев.

Совместные усилия ничего не дали, поэтому после чая остался один и все таки примерно прикинул как все должно быть. Оставалось только перенести все в 3д модельку и распечатать на 3д принтере.
Естественно мой уровень сварщика из пту, который если честно в последнее время полюбил вечернее пивко под турбо катки в доте для полной деградации мозга был низок для проработки грамотного 3д проекта по протезам, благо успел когда то (за год до нужды проектирования протеза) освоить sketchup, бестро(на самом деле за пару дней после работы) состряпал там модельку и начал печатать.




Заранее извиняюсь перед женой, за то что использую ее лампу для сушки ноготочков в своих грязных целях. Но сушит добротно.

механизм был собран и проверен, спустя всего две правки, третья модель оказалась самая удачная, каждая фаланга сгибалась идеально, гагрузка на последнюю фалангу была достаточно сильной при низкоа нагрузки на вторую, кольцо правда из пластика пришлось временно заменить на проволку, т.к. пластик из принтера плохо скользил.
Далее необходимо было сделать перчатку для руки, к которой в дальнейшем должен был крепится сам палец,
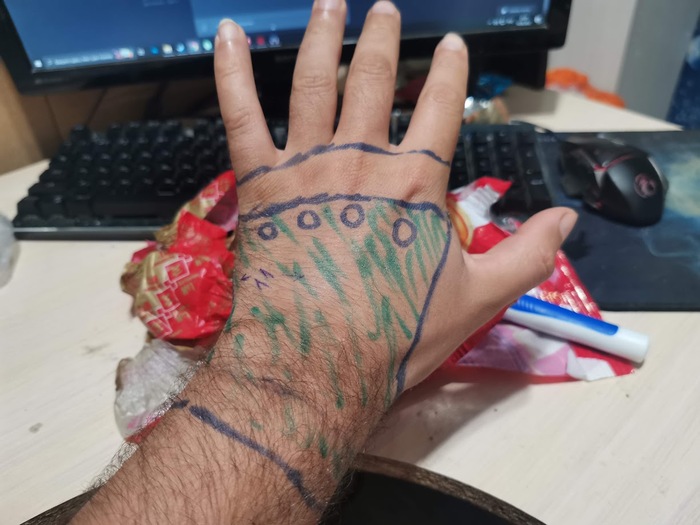
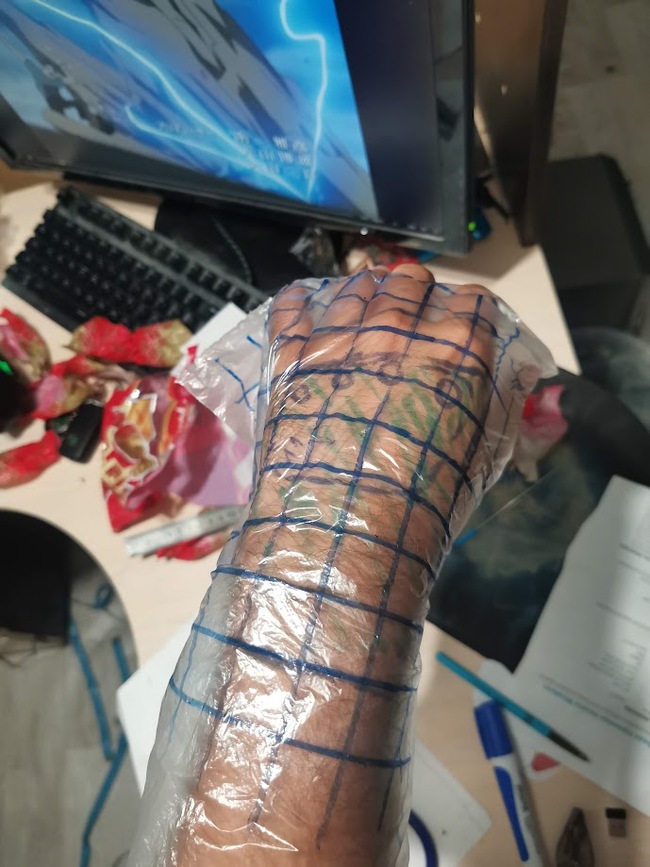
отрисовав на своей руки необходимые метки, начал переносить их на пакет, что бы далее перенести это все дело на кожу(кожу для кошельков и прочего, попутно увлекаюсь иногда изделиями из кожи), выглядит глупо и сложно, но это крайне эффективный способ получить все нужны скругления руки, поверьте мне!
Дело было в конце сентября 2022 года, тогда мы все потеряли работу и разошлись по своим направлениям, я же взяв очередной кредит для погашения других платежей решил поехать на вахту, где меня пару раз опрокинули на деньги(этжевахта) взял последний кредит на машину, что бы таксовать, теперь моя жизнь заключается в том, что я оч много работаю что бы мог платить кредиты, и времени больше на подобные шалости нету, но надеюсь что может кому приглянулась идея и кто нибудь доведет ее до ума, на старом жестком вроде остались 3д модельки проекта, возможно докапаю и выкину их на свою страницу вк
Также в идеях была доработка тактильной отдачи пальцев, сделав подушечки пальцев мягкими с жидкостью, которая просто перекачивалась во второй "мешочек" уже у обрубка пальца и создавала давление. Сам палец необходимо было делать из металла, тк прочность пластика с принтера оставляла желать лучшего, перчатку надо было делать на резинках универсальную, еще были какие то идеи по дороботке, но писал текст на одном дыхании и без проверки на грамотность, так что не ругайте, или ругайте, мне по#6ать. Мне надо ехать таксовать.
И не надо никаких тебе проводов приводов и прочей хрени, все работает идеально и без этого. Еще где то были зарисовки на руку типа как из видео ниже, но эту тетрадь я уже не могу найти никак.
В итоге хочу подвести черту о чертях из банков. Народ, людей убивает не алкоголь или сигареты, или еще что там есть, а необразованность в сфере получения кредитов, не берите их если не разбираетесь!
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi

«Ростех» вместе с компанией «Алюминий Металлург Рус» начнет производить высокотехнологичные комплектующие для экзопротезов. В рамках сотрудничества откроют сеть протезно-ортопедических мастерских, пишет RB.ru со ссылкой на госкорпорацию.
Для выполнения задач «Ростех» смог привлечь 1 млрд рублей прямых инвестиций. Участие в проекте частного капитала ускорит создание сети и простимулирует разработку, сообщил заместитель гендиректора госкорпорации Максим Выборных.
Производство начнется на базе завода «Металлист». В первую очередь предприятие станет выпускать коленные модули с механическими и пневматическими узлами, а еще протезы стоп из углеродного волокна. Запуск производства комплектующих для будущих мастерских запланирован на второй квартал этого года.
Кроме того, в перспективе — внедрение бионических технологий. В госкорпорации собираются вывести производство на полную мощность за два года.
Как живут люди с современными протезами?
С протезами приходится обращаться очень аккуратно — беречь от пыли и воды, чтобы не вывести из строя электронику и не повредить мелкие детали, утверждает блогер Константин Дебликов, который пользуется бионическими руками. Более того, нельзя просто купить один дорогостоящий протез и решить все бытовый задачи, уточнил мужчина.
«К примеру, есть красивые протезы, с которыми можно ходить в офис и на фотосессии, но выполнять сложные действия или поднимать тяжести — уже проблематично, так протез долго не проживет. А бывают такие, которые выглядят странно, зато способны держать тяжелый вес», — сообщил он.
По его словам, только одна из пяти новых моделей протезов работает с сенсорными экранами, хотя сейчас смартфон необходим во множестве ситуаций.
Один из самых известных отечественных проектов в этой сфере — «Моторика»
Ранее редакция Innovations рассказала историю успеха этой компании, которую основал разработчик киберпротезов Илья Чех. «Моторика» появилась в 2013 году, когда основатель заканчивал университет — в самом начале Илья буквально на кухне рисовал будущие протезы. Уже в 2019-м он стал предпринимателем года по версии компании «Ernst & Young», а в 2020-м — вошел в топ самых знаменитых людей Петербурга по версии «Собаки.ru».

Функциональность человека и его полноценная жизнь складывается из здоровых и хорошо работающих частей тела, но иногда случаются некие неприятные события, которые оказывают существенное влияние на жизнь человека. В числе таких событий можно назвать потерю конечности или её травмирование.
С этого момента у человека начинается новая жизнь и чтобы облегчить её, постаравшись вернуть, насколько это возможно, прежний функционал — предназначено протезирование с использованием механизированных протезов. Об этом и поговорим в этой статье.
Вообще, протезирование появилось не вчера. До нас доходят свидетельств о том, что протезирование применялось ещё в Древнем Египте. Например, у древнеегипетских мумий были найдены протезы большого пальца ноги.

В дальнейшем уже средневековые доктора старались вернуть возможности человеческому телу.

Но в прежние времена подобные протезы были всё-таки достаточно ограничены в возможностях, и лишь с трудом, и отдалённо могли выполнять обязанности потерянной конечности.
Наверное, можно было бы подумать, рассуждая логически, что количество ампутаций конечностей и их протезирования прямо пропорционально уровню развития общества, то есть, чем спокойнее живёт общества, тем меньше потерь конечностей у его членов.
Однако, сама жизнь диктует нам совершенно другое: даже в настоящее время в мире делается более 1 миллиона ампутаций, из которых около ста восьмидесяти тысяч делается в Америке, а в России — порядка семидесяти тысяч.
Проблемой же является то, что даже в настоящее время, чтобы получить протез, человек должен отстоять долгую очередь, пройти множество инстанций, чтобы в итоге… — да, получить дорогой протез. Здесь подразумевается не просто косметический протез, а именно восполняющий функциональность потерянной конечности, — например, тяговый или бионический. Под тяговым протезом подразумевается протез, который обладает достаточно высокой надёжностью и приводится в действие движениями тела, например, сгибанием руки в локте, после чего сжимается кисть.
Такого рода протезы являются достаточно простыми и надёжными, и достаточно часто воспроизводятся в бедных странах. Подобным является следующий проект:
Однако гораздо более интересным вариантом является бионическое протезирование. Бионический протез представляет собой максимальную копию настоящей конечности. Например, если мы говорим о руке, то каждый палец приводится в действие отдельным электродвигателем.
Подобные протезы являются самым функциональным вариантом из существующих, однако, к сожалению, отличаются достаточно высокой ценой. Например, если мы говорим о России, то стоимость такого протеза может стартовать от ста тысяч и достигать полутора миллиона рублей. На западе подобного рода протезы стоят ещё дороже, и их стоимость может легко составлять порядка 30 000 долларов и выше.
Хотя периодически и появляются интересные стартапы, которые пытаются переломить эту тенденцию.
Одним из таких известных стартапов стал проект Open Bionics, создатель которого, Джоэл Габбард, ещё в институте увлёкся робототехникой и заинтересовался темой протезов рук. Эта идея его настолько захватила, что он разработал несколько прототипов, которые впоследствии распечатал на 3D принтере и собрал из подручных материалов. Они были достаточно корявыми, но позволили ему запустить свою компанию на Indigogo, благодаря чему он смог собрать донатов на 44000 фунтов стерлингов.

Всё это позволило ему основать компанию, которая со временем открыла несколько филиалов в разных городах Великобритании, и кроме того, его компания стала первой в мире, официально сотрудничающей с системой государственного медицинского страхования Великобритании.
В процессе реализации своей идеи он заметил, что некрасивые и не совсем эргономичные протезы угнетают детей, и дети не хотят иметь с ними дело. Увидев это, ему пришла идея, что необходимо сделать нечто такое, что полюбилось бы всем детям. В итоге появилась рука Hero Arm, которая оформлена в стиле супергероев, например, железного человека и не только:

Несмотря на все усилия, стоимость подобной руки всё равно остаётся достаточно высокой и составляет порядка 8000 фунтов стерлингов, если по минимуму, и до 12 500 фунтов стерлингов, если по максимуму.
Цена достаточно немаленькая, даже для западных пациентов. И здесь мы вернулись к тому, с чего мы начинали в самом начале, — что даже в России стоимость подобных изделий весьма велика для пациента. Да, конечно, в России (к счастью) есть система медицинского страхования, которая позволяет покрыть эти расходы. Однако для участия в этой программе производитель должен пройти сертификацию, и сам пациент тоже должен пройти много специалистов, в итоге которой он получает выбор достаточно ограниченного количества изделий.
Неужели всё так плохо? Не совсем. Уже некоторое время существуют проекты, которые выкладывают в открытый доступ конструкции, программное обеспечение и векторные чертежи. Любой, кто скачает исходники, сможет (при соответствующих умениях) изготовить нужный протез самостоятельно.
Одним из таких проектов является проект Openbionics.org (почти собрат предыдущего проекта, только тот «.com», а этот — «.org» — открытый европейский проект). На сайте проекта имеется некоторое количество готовых конструкций, как бионических рук:

так и тяговых конструкций, приводимых в действие мышцами тела:
Анализируя всё имеющееся в интернете, можно прийти к выводу, что конструкции в свободном доступе являются либо достаточно топорными, либо достаточно сложными и дорогими, либо «всё сразу и много».
Как правило, причиной этого являются несколько факторов:
Малый объём производства (как вы знаете, чем больше объём производства, тем дешевле каждое конкретное изделие);
Потребность в труде высококвалифицированных и высокооплачиваемых специалистов из области медицины, робототехники, программирования;
Использование методов производства, изначально предназначенных для малых партий и опытного производства.
Вот на этом последнем пункте я хотел бы остановиться более подробно.
Сначала я сделаю небольшое отступление, и потом вы поймёте почему. Итак…
Есть известный американский самолёт, так называемый — «бородавочник», который ещё называют «самолётом, построенным вокруг пушки», то есть, у конструкторов изначально была в наличии пушка и уже ориентируясь на её тактико-технические характеристики, они спроектировали и самолёт. Таким образом, можно сказать, что самолёт был построен вокруг существующей пушки!

Другой пример: когда строители сначала (по желанию хозяев) располагают в ванной различные мешающие конструкции — вентиляционные отверстия и т.д. и т.п., а потом начинают мучиться и нарезать кафельную плитку для облицовки, так как все эти мешающие конструкции расположены не так, чтобы между ними, над ними и т.д. — было равное расстояние (равное целому числу плиток), что приводит к необходимости, долго и упорно мучаясь, нарезать кафельную плитку. А всего-то — следовало изначально учесть размеры кафельной плитки, и по возможности расположить существенные элементы помещения, с учётом их.
То есть зачастую мы сначала создаём проблему, а потом — «героически её решаем»!
Что же касается бионических протезов, это ярко выражается в том, что для их производства, даже серийного, используются 3D принтеры, в то время как могло бы использоваться литьё, или любые другие способы промышленного скоростного масштабного производства.
Да, понятно, что подобные методы производства не всегда доступны для рядового производителя. Кроме того, в мире известны целые фабрики, которые представляют собой множество установленных 3D принтеров, где осуществляется производство любых изделий с использованием исключительно 3D печати. Однако этот способ является хоть и интересным, но достаточно дорогостоящим в реализации, хотя бы из-за необходимости покупки большого числа 3D принтеров.
Именно здесь и видится возможность максимального удешевления и ускорения производства.
Например, выстроить логику создания бионической руки в рамках концепции максимального использования уже существующих и доступных для покупки запчастей. Например, детали частично могут быть куплены на известном китайском сайте, а частично куплены в любой сети запчастей для автомобилей.
Как ни странно, это правда. В свою бытность автору приходилось участвовать в сборке многих интересных вещей, и это дало следующее понимание: магазин автомобильных запчастей предоставляет собой практически бездонное море качественных, хорошо изготовленных деталей, и по весьма умеренной цене!
Разнообразные втулки, сочленения, соединения, болты, пары трения и т.д. и т.п. — всё это может быть куплено по доступной цене, в любых количествах и подобрано под конкретный проект. И это не обязательно детали как таковые: в качестве деталей может быть куплена цельная запчасть и разобрана. Это, что касается механической части конструкции (к сожалению, изобретатели подобный источник деталей мало используют, наверное, ввиду недостаточного знания таящихся в нём возможностей).
Что же касается самого каркаса руки, то он может быть изготовлен не с помощью использования дорогого промышленного литья под давлением, а с использованием следующего подхода: например, если мы возьмём за цель изготовить бионическую руку, то мы можем все элементы руки, — как напечатать на 3D принтере так и… вырезать с помощью лазерной резки!
Да-да, именно: ведь если подумать, 3D печать представляет собой «послойное наложение слоёв для создания объёмного объекта». Однако, кто сказал, что мы обязательно должны для создания такого объекта использовать 3D печать? Мы можем этот трёхмерный объект разрезать на плоские пластины (предварительно оптимизировав конструкцию), после чего эти плоские пластины вырезаются с использованием лазерной резки, и — свинчиваются болтами (картинка ниже — кликабельна).

Таким образом, мы получаем достаточно дешёвый, легко воспроизводимый в массовых количествах протез руки, который может быть подвергнут в дальнейшем следующему «улучшайзингу»: изготавливается несколько литейных форм, в которых этот каркас руки покрывается, например, резиной.
Изготовление литейных форм очень простое. Если вкратце: делается гипсовая модель, потом заливается силиконом, потом силикон разрезается по периметру, и гипс извлекается. Вуаля — форма готова для приёма механической руки, чтобы «одеть» её в резиновую кожу.
Заливка происходит достаточно быстро, и это позволяет производить подобные руки очень просто и недорого.
Что же касается приводов этой руки, то, как можно видеть по большинству конструкций, представленных в сети Интернет, в них чаще всего используют сервоприводы, могущие поворачиваться на определённый угол, и удерживать его. Однако самодельные конструкции, как правило, стараются строить «по пути наименьшего сопротивления», который не учитывает ненадёжность сервоприводов, так как у них происходит достаточно быстрый износ потенциометра, и он начинает шуметь (дребезжать при удержании угла, не может повернуться на нужный угол и т.д.). Кроме того, использование сервопривода, на взгляд автора, является добровольным отказом от миниатюрности, что в общем случае — не есть хорошо.
Как альтернативу сервоприводам, можно было бы предложить использовать миниатюрные мощные электродвигатели с металлическим редуктором, широко применяющиеся в качестве приводов миниатюрной самодельной робототехники. Это так называемая «серия приводов N20» (гуглить «n20 gear motor») — картинка увеличивается, кликабельно:

На левой картинке — двигатель положен на указательный палец руки (для понимания его размера)
Подобные двигатели выпускаются довольно широкой линейкой, дифференцированной как по усилию на выходном валу редуктора, так и по питающему напряжению. Они являются весьма мощными, несмотря на их малый размер, — их мощность на выходном валу может достигать 3 кг и более.
Да, они не позволяют устанавливать и удерживать определённый угол, однако их мощь и миниатюрность могут сослужить хорошую службу (если мы привнесём в конструкцию дополнительный аналоговый датчик Холла (как именно его расположить, — зависит от вашей конструкции и выдумки в целом).
Таким образом, на выходе мы получаем устройство, которое сочетает как плюсы сервопривода (то есть может удерживать определённый угол поворота вообще без износа потенциометра — его тут даже и нет), так и исключает его минусы (в отличие от сервопривода устройство является весьма миниатюрным).
Их единственным минусом является то, что они коллекторные. Хотя, если сделать к ним удобный доступ для обслуживания и плюс, если учесть их розничную цену… В общем, это всё неважно :-)
Ещё одним очень интересным способом привода, который, как мне кажется, ещё никто не применял, может быть использование цилиндрического линейного двигателя, о котором я рассказывал в одной из предыдущих статей.
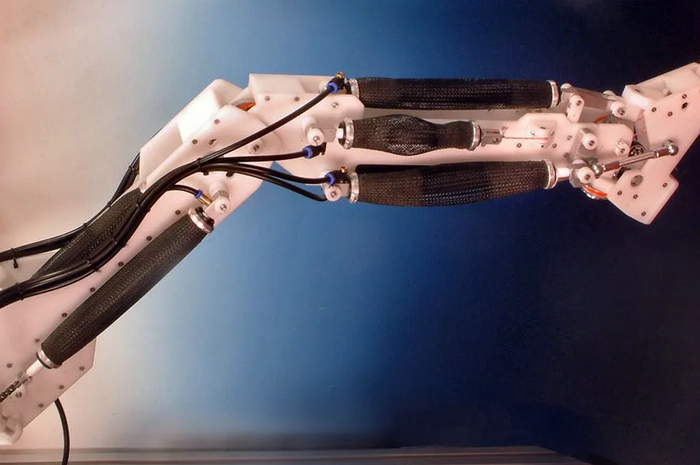
Так как для привода пальцев нужен, по сути, линейный привод (если мы возьмём за основу природное решение и будем приводить пальцы в движение с помощью тросов), то, необходимо будет только натягивать тросы (которые будут играть роль сухожилий у настоящей руки). Линейный двигатель для этого подходит как нельзя лучше: по сути, он будет представлять собой компактный «пучок палочек», расположенных в руке, которые движутся бесшумно, мощно, сверхбыстро (а если нужно — очень плавно и медленно) и весьма точно (напомню, что линейные двигатели подобного типа используются для smd-монтажа электронных компонентов, а из этого вы сами можете посудить о точности устройства).

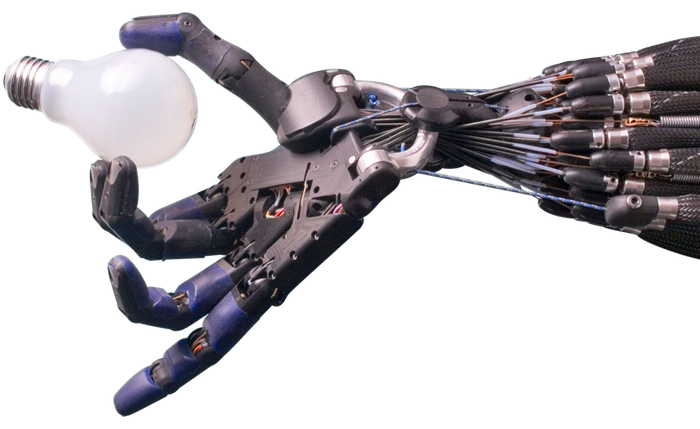
Применение такого подхода будет очень близким к настоящим мышцам, которые учёные пока пытаются имитировать с применением различных подходов, например, пневматического:
Что же касается управления всем этим устройством, то на данный момент и судя по анализу разработок, наиболее перспективным вариантом видится единственный: электромиография, — использование электрических импульсов остатков мышц на культе. У этого подхода есть, конечно, и свои минусы, которые связаны с тем, что со временем эти остатки мышц начинают атрофироваться и считать их сигнал становится всё сложнее. Учёные работают над этим вопросом, однако, этот подход наиболее применим в текущее время.
Для считывания данных с датчиков (с применением этого подхода), можно использовать модуль AD620, который может быть подключён к микроконтроллерам семейства Arduino.
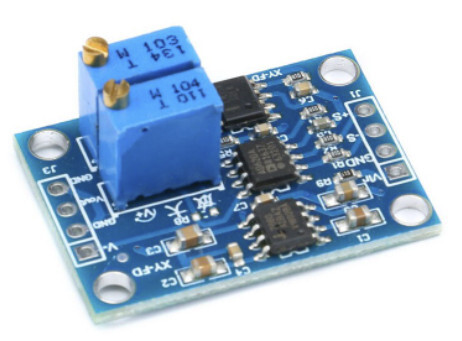
Подробный разбор работы с этой платой и образец кода можно найти вот по этой ссылке.
Подытоживая рассказ, отметим, что максимальное использование существующих готовых деталей (когда мы сначала не проектируем устройство, а потом уже подбираем под него комплекс деталей; а идём, наоборот, — сначала подбираем весь комплекс деталей (смотрим, что есть в наличии готового), и уже под найденное — проектируем устройство), использование скоростных методов производства, дешёвой готовой электроники, вроде Arduino или esp32 позволяет, на мой взгляд, разработать и начать производить в массовом порядке робокомплекты бионических рук.
В данном рассказе я постарался остановиться только на концептуальных моментах, которые, лично мне, просто бросаются в глаза.
Надеюсь, этот рассказ был для вас интересен и полезен!
В Новосибирске применили новый способ эндопротезирования: специалисты Новосибирского НИИТО первыми в России провели пациентке операцию по замене таранной кости на керамическую🦴






