



Ровер Curiosity сфотографировал Землю и Венеру с поверхности Марса
Ровер NASA Curiosity, работающий на Марсе, сделал уникальные фотографии. Команда миссии использовала его камеру MastCam, чтобы взглянуть на запыленное марсианское небо. Ровер сделал два снимка примерно через 75 минут после захода Солнца. Фотографии были сделаны 5 июня, на 2784 сол или марсианский день. Снимки Земли и Венеры были объединены.


Показать полностью
1
NASA выбрало компанию, которая доставит на Луну ровер для поиска воды
Компания Astrobotic заключила с NASA контракт на 199,5 миллиона долларов. Это соглашение по доставке на Южный полюс Луны ровера Volatiles Investigating Polar Exploration Rover (VIPER), который предназначен для поиска воды в лунных кратерах. Полет должен состояться в конце 2023 года. Этот ровер имеет большое значения для лунной программы Artemis, поскольку должен отыскать надежные доказательства присутствия воды в затененных местах лунных кратеров, от чего зависит определение места для строительства будущей базы на Луне.
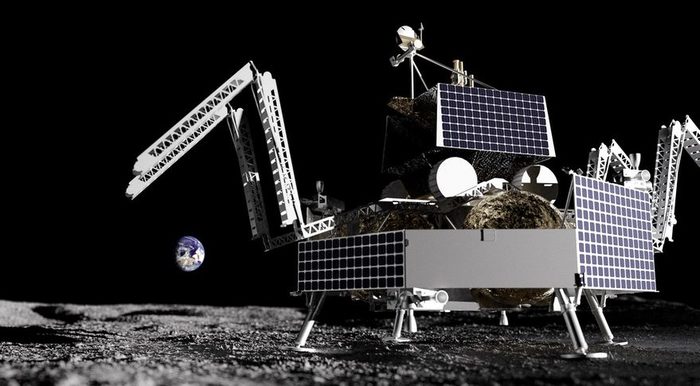
Полет ровера VIPER входит в программу NASA Commercial Lunar Payload Services (CLPS), которая подразумевает сотрудничество с частными компаниями в освоении Луны. В рамках своей части контракта по VIPER компания Astrobotic будет отвечать за комплексные услуги по доставке ровера на Луну, включая интеграцию с посадочной платформой Griffin, запуск с Земли и посадку на Луну.
Базовая продолжительность миссии VIPER составляет сто дней. Он должен будет за это время проехать несколько километров и с помощью четырех научных инструментов собрать образцы грунта для анализа. У ровера также будет бур, который сможет проникать до метра в глубину. Разные версии трех его инструментов слетают на Луну в 2021 и 2022 годах на других научных платформах, которые также будут запущены в рамках программы CLPS частными компаниями. Ранее NASA заключило три контракта по программе CLPS. Среди них уже есть и Astrobotic, которая в следующем году отправит на Луну научную посадочную платформу.
Показать полностью
1
1
На марсоход Perseverance установлены колеса и парашютная система
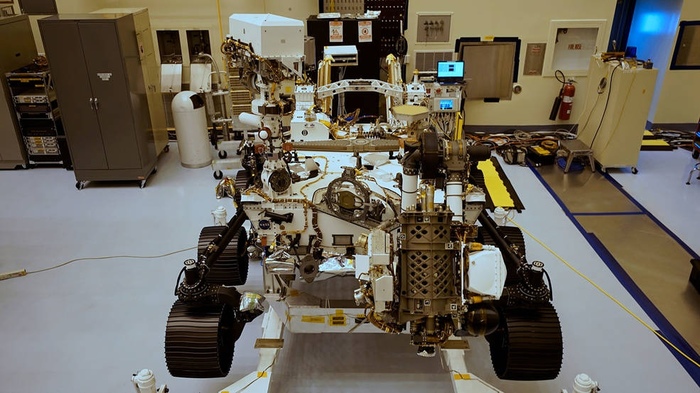
В Космическом центре Кеннеди во Флориде проходит заключительный этап подготовки ровера Perseverance к отправке на Марс. Одними из последних установленных элементов стали колеса и парашютная система.
Предыдущие испытания ровер проходил на запасных колесах, а актуальные были установлены в специальной защитной антистатической пленке, которую снимут непосредственно перед запуском. Шесть колес сделаны из сплава на алюминиевой основе, имеют титановые спицы, а также улучшенную конструкцию, основанную на опыте износа колес Curiosity. Колеса Perseverance имеют больший диаметр, чем у Curiosity (52,6 см против 50,8 см), также они немного уже и имеют другой протектор, состоящий не из 24 сильно изогнутых ступеней, как у Curiosity, а из 48 слегка изогнутых. Эти колеса должны быть более устойчивыми к износу на острых камнях и иметь хорошую проходимость в песке.

Парашютная система также была собрана и установлена на ровер. На нее ляжет основная нагрузка по сохранению ровера в одной из самых опасных фаз – на спуске. 88-килограммовый парашют должен быть развернут на высоте 11 километров над поверхностью Марса, ему потребуется полсекунды, чтобы развернуть 21,5-метровый купол и замедлить спуск 1025-килограммового ровера.
Perseverance будет отправлен на Марс ближайшим летом на ракете-носителе Atlas V 541, а сядет на Марс в кратере Jezero 18 февраля 2021 года. nasa


Показать полностью
3
Почти 11 миллионов имен отправятся на Марс вместе с ровером Perseverance
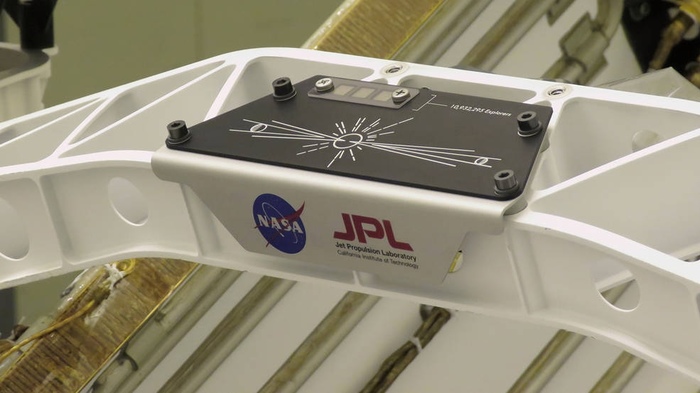
На борт ровера NASA Perseverance установлен алюминиевый блок с тремя кремниевыми чипами, на которых содержатся 10 932 295 имен людей, записавших свои имена в рамках акции «Отправь свое имя на Марс». Также на чипах содержатся 155 эссе, которые были написаны учащимися из США, вышедшими в финал конкурса названий для марсохода.
Ровер Perseverance должен стартовать на Марс ближайшим летом и сядет в кратере Jezero 18 февраля 2021 года. На алюминиевой пластине выгравировано Солнце, а также Земля и Марс, к которым направлены лучи от звезды, что олицетворяет связь между планетами, которую несет миссия Perseverance.
Команда миссии начала приводить конфигурацию 1043-килограммового ровера в режим интеграции с ракетой-носителем Atlas V. nasa
Показать полностью
2
NASA разрабатывает новую концепцию ровера
Кувырки, прыжки и мгновенные повороты не являются стандартными манёврами которые под силу выполнить обычному космическому аппарату, исследующему далёкие миры. Традиционные марсоходы, например, передвигаются при помощи колёс, и они не смогут продолжить свою миссию если перевернутся. Однако, на небольших телах, таких как астероид или комета, учитывая их низкую гравитацию и очень неровные поверхности традиционные методы передвижения (на колёсах) довольно опасны для исследовательских аппаратов.
Новый проект представляющий из себя робота, специально предназначенного для преодоления проблем передвижения на малых телах разрабатывается совместно учёными из Лаборатории реактивного движения NASA, Стэнфордского университета и Массачусетского технологического института.

Робот ёж: кубический ровер, который может однажды исследовать некоторые из самых экстремальных мест в нашей Солнечной системе.
“Ёжик является новым типом робота, который будет перемещаться по поверхности благодаря прыжкам. Его форма – это куб и он может работать независимо от того, на какую из сторон приземлился”, – сказал Исса Неснас (Issa Nesnas), руководитель команды JPL.
Основная концепция представляет собой куб, который передвигается при помощи прыжков, осуществляемых шипами и тормозит благодаря наличию внутренних маховиков. Шипы также защищают корпус робота от шершавой местности и выступают в качестве своеобразной ноги.
“Ко всему прочему в шипах мы можем разместить ряд инструментов, таких как, например, тепловой зонд благодаря которому можно будет измерять температуру поверхности”, добавил Неснас.
Два рабочих прототипа “ежей” продемонстрировали сои возможности на борту самолетов NASA способных создать условия микрогравитации благодаря параболическому типу движения в июне 2015 года. В ходе 180 парабол (четыре рейса), эти роботы выполнили несколько типов маневров, которые необходимы для движения на малых телах с низкой гравитацией. Исследователи протестировали эти манёвры на различных материалах, которые имитируют широкий спектр поверхностей: песчаные, твёрдые, скалистые, скользкие и обледенелые, мягкие и рыхлые.
“Мы доказали, что наш “ёжик” может выполнять контролируемые прыжки в условиях низкой гравитации”, – сказал Роберт Рид (Robert Reid), ведущий инженер проекта в JPL.
В результате одного из экспериментов во время параболического полёта, исследователи смогли добиться от “ежа” выполнения манёвра “торнадо”, который заключается в интенсивном вращении. Этот манёвр может быть использован для того, чтобы выбраться из песчаной воронки или других мест, в которых обычный колёсный робот просто бы застрял.

Астероид Итокава занимает центральное место на этой фотографии, полученной космическим аппаратом “Хаябуса” в октябре 2005 года
Прототип “ежа” JPL имеет три маховика и восемь шипов. Он весит чуть более пяти килограмм, однако с полезной нагрузкой его масса возрастёт до 9 килограмм с инструментами, такими как спектрометры и камеры. Стэнфордский прототип компактнее своего брата из JPL.
“Геометрия корпуса имеет большое влияние на траекторию при скачкообразном движении. Мы экспериментировали с несколькими формами и обнаружили, что форма куба обеспечивает лучшую производительность при прыжках. К тому же куб проще в изготовлении и транспортировке в космическом корабле”, – сказал Бенджамин Хокман (Benjamin Hockman), ведущий инженер из Стэнфорда.
В настоящее время исследователи работают над автономностью нового робота. В идеале такие аппараты должны работать самостоятельно, подобно современным марсоходам. Которые общаются с Землёй благодаря спутникам, вращающимися вокруг Марса. Стоимость строительства подобного робота относительно низкая, к тому же на одном корабле может находиться несколько роботов, которые будут начинать свою работу поэтапно, что в свою очередь позволит им исследовать большую территорию. ссылка
Показать полностью
2
NASA просит придумать сенсор для венерианского механического ровера
Лаборатория реактивного движения NASA объявила конкурс на разработку сенсора для будущего венерианского ровера. Этот сенсор, как и весь ровер, должен обходиться без электронных компонентов и быть полностью механическим, поскольку электроника не может долго выдерживать экстремально высокую температуру и давление на поверхности планеты. Условия конкурса опубликованы на краудсорсинговой платформе heroX.
Температура на поверхности Венеры достигает 450 градусов Цельсия, а атмосферное давление в 92 раза превышает земное. Хотя советским зондам несколько раз удалось совершить мягкую посадку на планете, но рекорд продолжительности работы на поверхности — до момента, когда электроника выходила из строя из-за экстремальных условий — не превышал 127 минут.

Российские и американские ученые прорабатывают проекты долгоживущих зондов. В частности, российский аппарат «Венера-Д», как ожидается, сможет проработать на поверхности около двух-трех часов. Однако участники программы NASA Innovative Advanced Concepts (NIAC) полагают, что использование дополнительных мер для защиты электроники или холодильных агрегатов сильно удорожает проект и может продлить жизнь зонда не более, чем на сутки.
Поэтому они предложили отказаться от электроники в пользу механических автоматов, похожих по принципу действия на механические часы или на гигантские шагающие конструкции голландского художника Тео Янсена. Первая фаза разработки механического ровера для экстремальных условий (Automaton Rover for Extreme Environments — AREE) завершилась в 2017 году. Предполагается, что ровер будет получать энергию от ветрогенератора, запасать ее с помощью пружин, похожих на часовую пружину, управлять им будет механический компьютер.
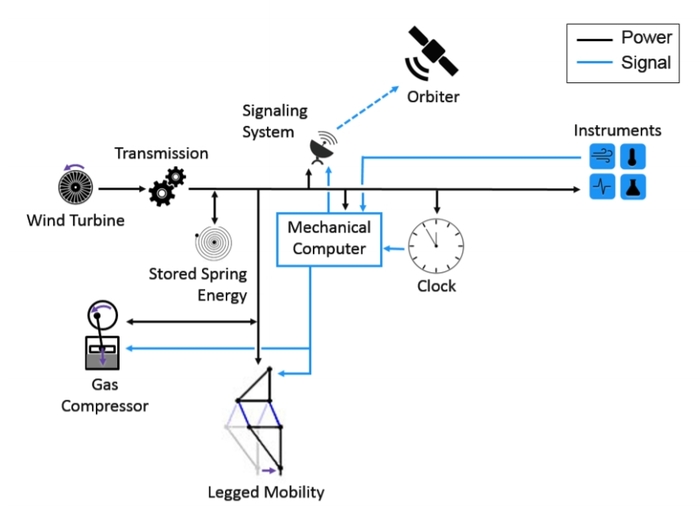
Принципиальная схема одного из вариантов венерианского механического ровера
Наиболее сложной задачей для разработчиков была организация связи и передачи данных на Землю. В качестве одного из вариантов, который позволял обойтись без электроники, рассматривалась запись информации на валики, похожие на валики фонографа, а затем отправка их в верхние слои атмосферы с помощью аэростата. Там аэростат должен был подхватить беспилотник, способный считать данные с валика и передать их на орбитальный аппарат. Другой, более реалистичный, по мнению авторов, метод предусматривал использование электронных устройств, но не на базе полупроводниковых транзисторов, а на основе вакуумных электронных ламп, которые более устойчивы к воздействию высоких температур.

Теперь Лаборатория реактивного движения объявила конкурс на разработку сенсоров, которые не дадут роверу попасть в опасную ситуацию при движении по поверхности Венеры. Этот сенсор должен заблаговременно обнаруживать крупные камни, расщелины, крутые склоны, и, главное, быть полностью механическим.
Заявки должны быть поданы до 29 мая, в начале июля будут объявлены победители. За первое место будет выплачена награда в 15 тысяч долларов, за второе место — 10 тысяч, а за третье — пять. ссылка
Показать полностью
3

Поиграем в бизнесменов?
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.

Голосование по выбору имени для ровера Mars 2020
Голосование по выбору имени для ровера Mars 2020
Летом этого года ракета Atlas V отправит к Красной планете миссию Mars 2020. В ее рамках на Марс будет высажен ровер, который займется астробиологическими исследованиями и сбором образцов, которые в дальнейшем могут быть возвращены на Землю. До недавнего времени у марсохода не было собственного имени: для его обозначения использовалось название миссии. Но вскоре это изменится.
Летом 2019 года NASA объявило конкурс на поиск лучшего имени для нового марсохода. С целью популяризации космических исследований, он проводился среди американских школьников. От участников требовалось не просто выбрать имя, но и написать небольшое эссе, обосновывающее почему именно оно лучше всего подходит для марсохода.
В общей сложности агентство получило 28 тысяч эссе. После их рассмотрения был составлен шорт-лист, куда вошли девять следующих названий:
Endurance (Выносливость);
Tenacity (Упорство);
Promise (Перспектива);
Perseverance (Настойчивость);
Vision (Видение);
Clarity (Ясность);
Ingenuity (Находчивость);
Fortitude (Стойкость);
Courage (Смелость).
Теперь же NASA запустило голосование. На сайте http://go.nasa.gov/name2020 любой желающий может проголосовать за один из девяти вариантов. Голосование продлится до 27 января. Его результаты будут учтены при выборе названия ровера. Итоги конкурса будут объявлены в начале марта. http://go.nasa.gov/name2020
Показать полностью
1