Всем доброго времени суток! Подумываю взять вышеуказанный комплект, но сомневаюсь в их совместимости. Имеет ли кто-то опыт полётов с этим комплектом? Так же интересно, могут ли эти очки использоваться для вывода картинки компьютера, например полетать в симуляторе?
Никто не верил что они полетят. Вопреки хейтерам удалось импортозаместить карбоновые рамы дронов дешёвой фанерой.
К началу 2023 года стало очевидно, что дроны, особенно дроны-камикадзе, выходят в на одну из главных ролей в современной войне. FPV-тематика, ранее интересная лишь узкому кругу энтузиастов, оказалась в центре внимания. В России резко появилась острая нехватка инфраструктуры, квалифицированных специалистов, производителей дронов и комплектующих, как и самих пилотов. В этой критической ситуации, когда потребность в дронах была немедленной, а необходимых ресурсов у солдат на фронте практически не было, возникло общенародное волонтёрское научно-техническое движение. Эти энтузиасты, инженеры и программисты оперативно взяли на себя роль учебных центров для пилотов, сборочных предприятий и конструкторских бюро, в гаражах, на предприятиях после смены и просто у себя дома энтузиасты начали разрабатывать и собирать сами дроны, РЭБ, системы сброса и даже электронные компоненты.
Вес рамы аналогичен карбоновой, жесткость не уступает.
Одним из таких спонтанно образовавшихся волонтёрских объединений стало КБ70 из Томска, состоящее из промышленного дизайнера Алексея Кремлёва и инженера-тест-пилота Андрея Кузнецова. Говорить о чёткой структуре в волонтёрской среде сложно – она подобна течению и постоянно меняется, имея огромное количество горизонтальных связей по всей стране. В проекте участвовали самые разные люди: инженеры, ученые, другие волонтёрские объединения, такие как «Так точно! 70» или «Одеяло 70», а также ветераны томских и северских спецподразделений.
При острой нехватке комплектующих для сборки дронов, которые на начальном этапе приходилось заказывать в частном порядке, в розницу с китайских маркетплейсов, ребята из КБ70 решили решить проблему дорогостоящих карбоновых рам, вокруг которых собирается сам квадрокоптер. Задача была чётко определена: «Массово, быстро и дёшево производить рамы для сборки беспилотников».
Разведчики - диверсанты готовятся кошмарить врага в тылу.
Выбор конструкции и материала
К тому времени существовало два основных способа изготовления рам, схожих с подходами в автомобилестроении: рамная конструкция, вырезаемая из листового материала, и объёмный несущий кузов, как у дронов типа «Mavic». Поскольку изготовление объёмных пластиковых деталей было посильно только крупным предприятиям с большими инвестициями, было решено остановиться на более простом и дешёвом способе – раме из листового материала. Вариант изготовления матриц для композитных корпусов на основе эпоксидных смол и волокнистых наполнителей также был рассмотрен, но отброшен как технологически сложный и долгий.
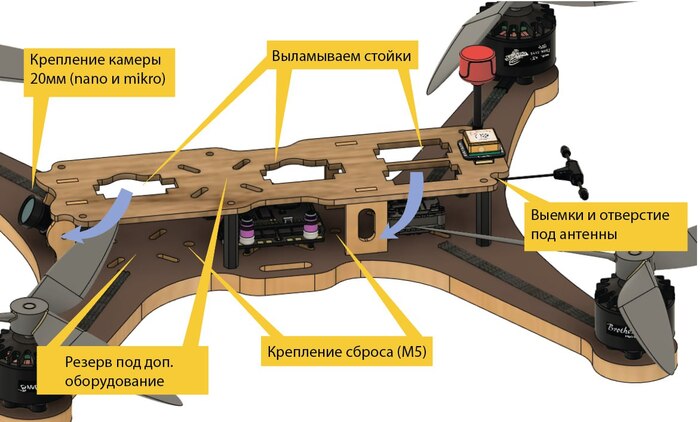
Функционал фанерной рамы.
Следующим этапом исследования стал поиск доступных листовых материалов для дешёвого и быстрого производства рам. Углепластики оказались слишком дорогими и сложными как в производстве, так и в закупке готовых листов. Стеклотекстолит марки СТЭФ можно приобрести в виде листов, но его транспортировка в Томск с Урала, где он производится, означала бы сложную логистику и возможные задержки в поставках. Стоит отметить, что в центральной России многие разработчики в итоге выбрали СТЭФ для производства рам.
Листовой алюминий оказался слишком дорогим как в приобретении, так и в раскрое, что оказалось в итоге под силу только крупным производителям с солидным финансированием. В итоге из доступных и распространённых материалов остались только фанера и алюминиевый композит. Первые же тесты алюминиевого композита показали его недостаточную прочность и полное отсутствие упругости, при перегрузке на вираже дрон мог просто «сложиться» и упасть. Оставалось только попробовать фанеру.
Волонтёрские дроны.
Первые эксперименты с фанерой превзошли все ожидания. Оказалось, что этот простой и доступный материал обладает достаточной прочностью и упругостью для создания рам дронов. Фанера легко поддается обработке, что позволяло быстро изготавливать необходимые детали. Более того, её доступность и низкая стоимость делали этот материал идеальным для массового производства. «Мы были приятно удивлены свойствами фанеры», — вспоминает Андрей Кузнецов. «Она не только оказалась достаточно прочной, но и эффективно гасила вибрации, что положительно сказывалось на стабильности дрона в полете».
Раскладка рамы на листе, минимум отходов.
Алексей Кремлёв готовится к первой отправке.
Быстро, дёшево, много: принципы производства
«Поскольку конечному потребителю дронов — оператору на фронте — дрон должен был приезжать уже собранным, настроенным и готовым к полёту, то с точки зрения производства рам не было никакого смысла делать их разборными», — поясняет Алексей Кремлёв. «Дешевизна фанеры означала, что нет необходимости в экономии материала при раскрое листа. Добавляем к этому лишний вес крепёжных метизов и снижение жёсткости в местах крепления лучей к центральной части дрона.
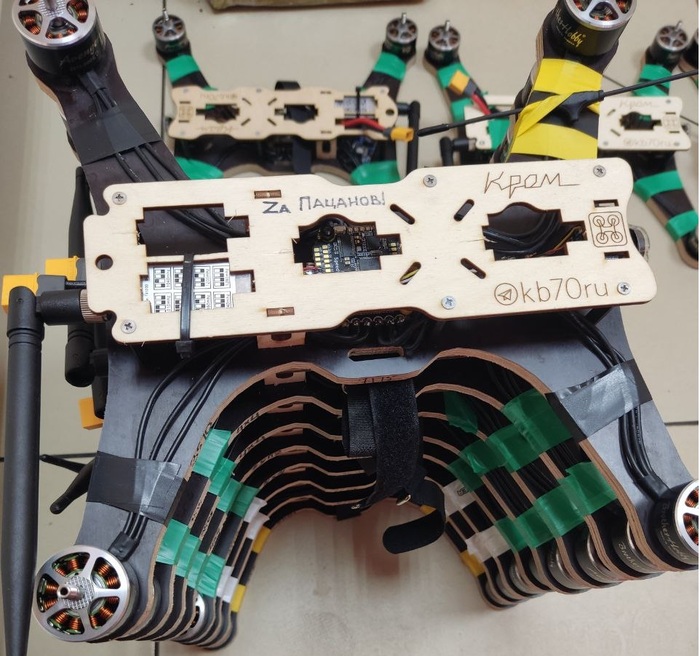
Производство верхней части рамы на СО2 лазере, каждая деталь несёт в себе заложенный функционал.
Рама квадрокоптера состоит из 2 частей, что увеличивает скорость сборки и снижает вес.
Поэтому основная часть дрона представляет собой просто одну деталь, что упрощает и значительно ускоряет процесс сборки квадрокоптера». Конструкция рамы представляла собой цельную фанерную пластину с вырезами для установки компонентов. Дополнительная верхняя фанерная пластина служила площадкой для аккумуляторной батареи и для установки курсовой камеры с помощью выламываемых из неё же вертикальных стоек.
В итоге для производства рамы дрона требовались только фанера двух видов, пластиковые стойки и метрический крепёж формата М3 и М2, доступный в специализированных магазинах.
Первые испытания и запуск в серию
Первые же полётные испытания показали, что конструкция удачная. Фанера гасила паразитные вибрации, и не требовались дополнительные настройки программного нивелирования вибраций. Испытания семидюймового дрона с нагрузкой в виде полуторалитровой бутылки с минеральной водой тоже прошли успешно.
Первый полёт фанерного квадрокоптера.
Было решено запускать производство рам в серию. К этому моменту на фронте начали появляться трофейные детали с упавших и не взорвавшихся вражеских поломанных квадрокоптеров, и наличие фанерной рамы дало возможность пересобирать дроны и отправлять их обратно.
Изначально раму рассылали всем желающим бесплатно, но быстро выяснилось, что многие заказывали их только ради халявы. В итоге было принято решение распространять рамы по себестоимости, а чертежи выдавать другим волонтёрским техническим объединениям для самостоятельного производства. Вскоре появились «фанерные братья» в других регионах.
Сброка фанерных дронов на урале.
Было налажено крупное производство квадрокоптеров на Урале, а также волонтёрское производство рам в Воронеже. Множество дронов собрали на северо-западе России и в Ханты-Мансийском автономном округе (ХМАО).За 2023–2024 годы было выпущено более 2000 фанерных квадрокоптеров-камикадзе на рамах «Кром».
Помимо ударных дронов на семи-, девяти- и десятидюймовых пропеллерах, по запросу одного из воинских подразделений на Запорожском фронте была разработана учебная пятидюймовая рама для тренировок и обучения. Эта рама нашла применение не только в российских силовых структурах, но и в силах специальных операций Республики Беларусь.
Учебно-тренировочный дрон "Кром-5"
Сейчас чертежи учебного дрона «Кром-5» распространяются бесплатно и доступны для самостоятельного изготовления, что позволяет экономить более чем в 10 раз на этой детали.К концу 2023 года себестоимость рамы для 7–10-дюймового дрона вместе с крепежом составляла около 230–250 рублей, в то время как карбоновая рама из Китая на AliExpress стоила около 3500 рублей. Производство рам было развёрнуто во многих мебельных цехах, оснащённых стандартным ЧПУ-оборудованием.
Инструкция по сборке
Змей горыныч на основе фанерной рамы.
Закат «фанерных костылей»
Ко второй половине 2024 года ситуация с производством квадрокоптеров-камикадзе стабилизировалась. В России появились крупные поставщики с большими бюджетами, которые наводнили фронт десятками тысяч ударных дронов. Потребность в «фанерном костыле» отпала.История фанерных рам «Кром» – это впечатляющий пример того, как изобретательность, прагматизм и кооперация могут решить критически важные задачи в условиях дефицита и ограниченных ресурсов.
Волонтёры собирают дроны камикадзе
Это пример эффективного инженерного решения, адаптированного к конкретным нуждам и возможностям. Проект явно сыграл свою роль в обеспечении фронта ударными дронами в сложный период времени. Это история успеха, демонстрирующая, как небольшая группа энтузиастов из провинциального гаража в гаражном кооперативе, применяя инновационный подход, может внести заметный вклад в общее дело.
Дрон перехватчик
Пилот-испытатель-инженер Андрей Кузнецов
Проект КБ70 после завершения эпопеи с фанерными дронами перешёл к выпуску уникальной экипировки для операторов FPV
Доброго времени суток, пикабушники, любители дронов и просто любители технопорно. В этом посте пойдёт речь о приёмнике для FPV изделия R9 Slim+ OTA, а именно о том как его подключить к полётнику на примере SoloGood F405 V4. Сразу скажу, хорошо подумайте перед покупкой R9, во-первых, необоснованно дорого, во-вторых, ресурсозатратно с точки зрения подключения к полётнику. Нужно два отдельных UART, для приёма данных и отправки телеметрии. Ну, а если вы уже счастливый обладатель этого девайса, то надеюсь, мой пост вам чем-нибудь поможет.
Полётный контроллер с контроллерами моторов
Приёмопередатчик R9 Slim+ OTA
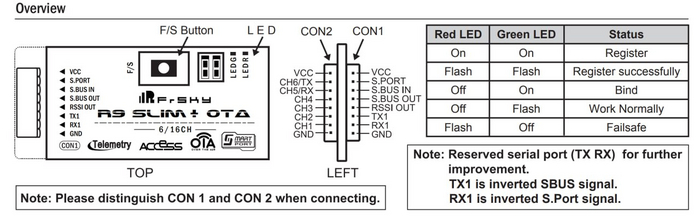
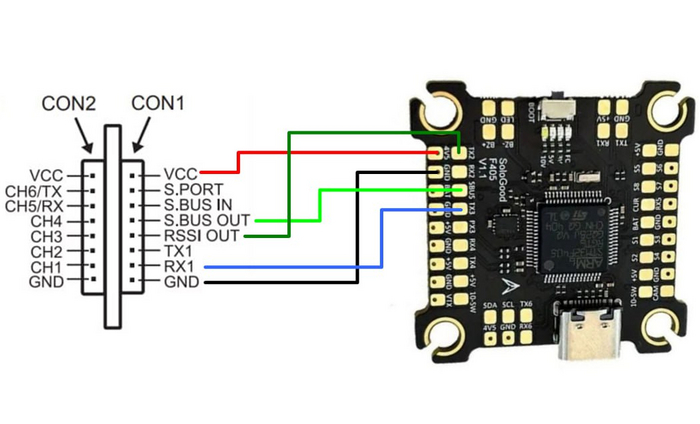
Распиновка из мануала приёмопередатчика
Приёмник у нас имеет два разъёма подключения CON1 и CON2, мы будем использовать CON1. Приемник поддерживает двунаправленные протоколы SBUS и S.Port. Если подключать напрямую к UART-ам микроконтроллера, то нам потребуется инвертировать сигнал для подключения к полётнику на базе F405, однако приёмник уже имеет выводы TX1, RX1 специально для такого случая (нет инвертора на плате полётника, нет отдельной платы инвертора, полётник не на базе F7, H7). Варианты подключения могут быть такими:
1) Подключить только SBUS. Так мы сможем управлять дроном без телеметрии.
2) Подключить S.Port и SBUS, так мы сможем получить телеметрию на свой пульт. Но в этом случае сигнал RSSI мы будем получать на пульт и отправлять обратно на приёмник коптера для отображения через OSD, занимая один из каналов управления.
3) Подключить S.Port, SBUS, и аналоговый RSSI выход. RSSI сразу будет отображаться через OSD, минуя путь до пульта и обратно к дрону.
SBUS IN мы подключать не будем, так как он используется в качестве входа телеметрии с резервного приёмника.
Пойдём по третьему пути, так как он геморройный и на нашем полётнике нет аналогового RSSI входа. Ток и напряжение батки есть, а RSSI разработчики зажали.
Плата полётного контроллера
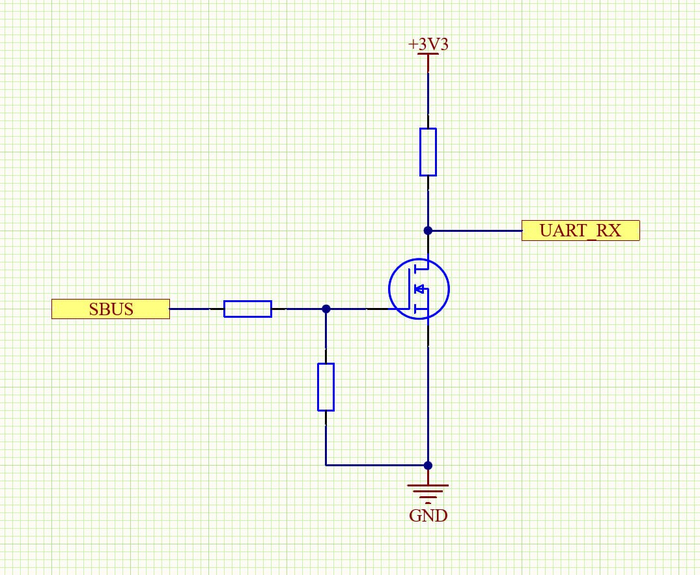
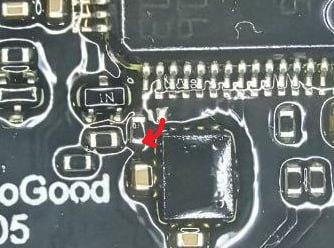
Посмотрим теперь на наш полётник. Можно отметить наличие отдельной площадки SBUS. Рядом находится UART2 и UART3 (площадки TXn, RXn, где n - номер UART). Подключим к этой периферии микроконтроллера наш приёмник. От площадки SBUS идёт дорожка на инвертор, собранный на N-канальном MOSFET-е. Выход инвертора соединён с площадкой RX2 и ногой микроконтроллера UART2 RX.
Инвертор на N-Channel MOSFET
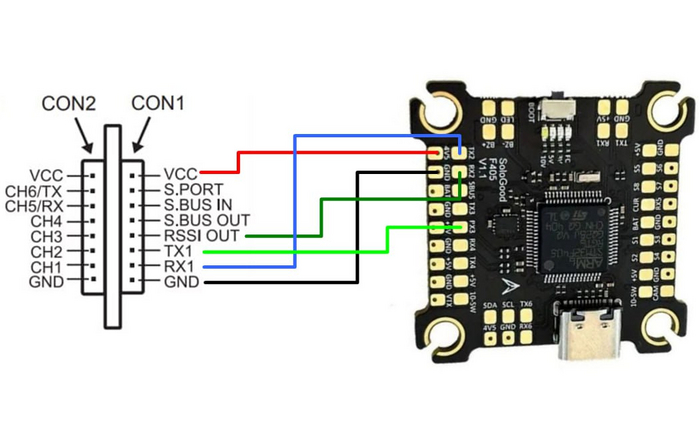
Имея вышеперечисленные входные данные, приступим к ремапингу аналогового входа АЦП для RSSI на свободную площадку полётника, но не на абы на какую. Для начала определимся с подключением приёмника по SBUS и S.Port. Так как на плате мы уже имеем инвертор, то вывод SBUS OUT приёмника можем соединить с площадкой SBUS полётника, заняв тем самым RX2. Для S.Port нам так же нужен инвертор, которого нет на плате полётника, но у нас есть инвертированный вход RX1 на плате приёмника. Соединяем RX1 пин приёмника с площадкой TX3 полётника, занимая UART3 TX. Подключаем питание 4V5 и GND.
Теперь посмотрим занятые ресурсы в консоли BetaFlight конфигуратора. Нужные нам строчки:
resource ADC_BATT 1 C01
resource ADC_RSSI 1 C02
resource ADC_CURR 1 C03
resource PINIO 1 C02
Это означает, что используется ADC1 на порту C и пинах PC1, PC3. Звякнем мультиметром PC3 (11 нога контроллера) на площадку CUR. Да звониться, также звониться и PC1 на BAT через делитель напряжения (2 резистора и сглаживающий конденсатор). C02 на нашем полётнике переназначен и управляет включением выключением DC-DC на 10V, его выход обозначен 10-SW, отдельно пин IO не выведен на площадки. В противном случае мы бы могли перерезать дорожку управления DC-DC, повесить её на шину 3V3, и тогда DC-DC у нас бы был всегда включен, а площадку IO можно было бы использовать для RSSI, но не судьба.
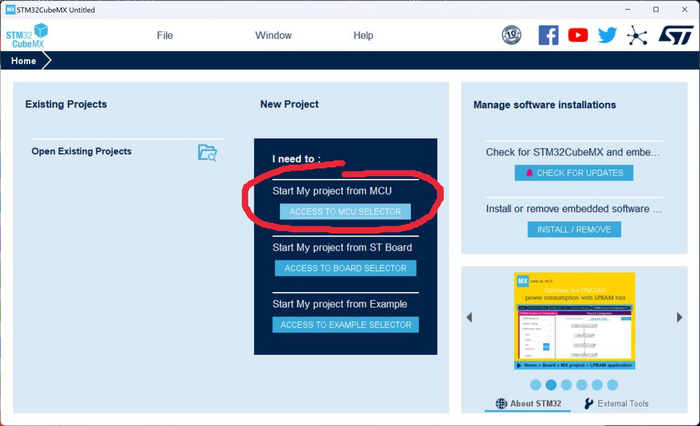
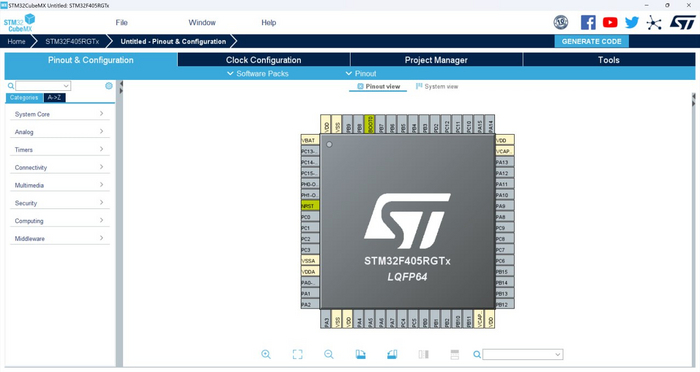
Займёмся ремапингом аналогового входа АЦП. Для того того, чтобы понять что дальше будет происходить, я настоятельно рекомендую поставить программу STM32CubeMX для разработчиков принципиальных схем и прошивок. Данный софт вам поможет наглядно и быстро разобраться с тем, куда что можно подключить, а что нельзя. Конечно, можно использовать datasheet на микроконтроллер, но будет не так оперативно. И так, скачали, установили, запускаем. Выбираем селектор микроконтроллеров.
STM32CubeMX главное меню
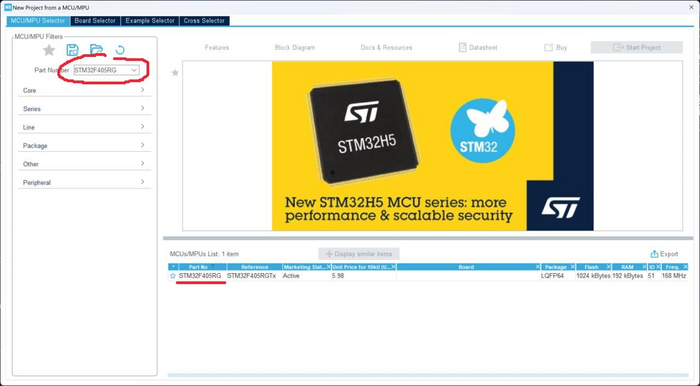
Здесь в строке партийника вбиваем наш камень и выбираем в таблице поиска.
STM32CubeMX выбор микроконтроллера
STM32CubeMX микроконтроллер нашего полётника
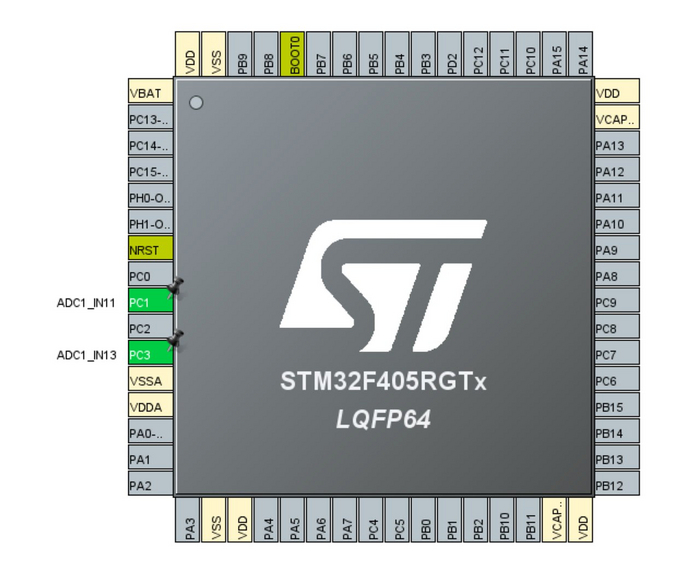
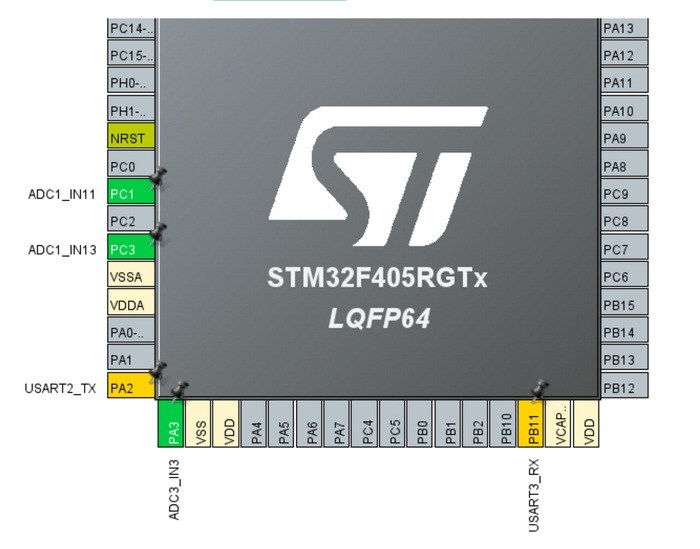
Сделаем отметку для себя задействованных ресурсов, заодно посмотрим номера каналов АЦП. Кликнем по пинам PC1 и PC3 и назначим их как входы ADC1, заняв каналы IN11 и IN13.
Ток и напряжение на батке
При назначении ножки под RSSI не должно быть пересечения с уже выбранными каналами в пределах одного АЦП. После подключения приёмника у нас остались свободными выводы UART2 TX и UART3 RX. Смотрим ресурсы, относящиеся к UART:
resource SERIAL_TX 1 B06
resource SERIAL_TX 2 A02
resource SERIAL_TX 3 B10
resource SERIAL_TX 4 A00
resource SERIAL_TX 5 C12
resource SERIAL_TX 6 C06
resource SERIAL_RX 1 B07
resource SERIAL_RX 2 A03
resource SERIAL_RX 3 B11
resource SERIAL_RX 4 A01
resource SERIAL_RX 5 D02
resource SERIAL_RX 6 C07
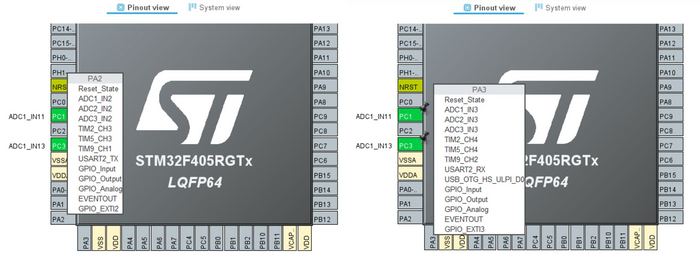
Возможность вывода на PA2 и PA3
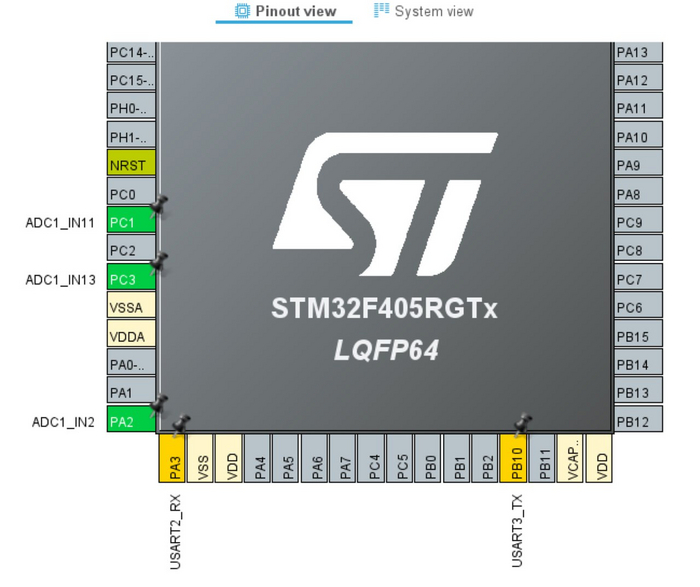
Нас интересует A02 - PA2, A03 - PA3, B10 - PB10, B11 - PB11. И только PA2 и PA3 можно использовать в качестве входов ADC1 с каналами 2 и 3 соответственно. PA3 у нас занят SBUS, остаётся PA2.
Итоговая конфигурация для подключения приёмопередатчика
В командной строке BetaFlight пишем:
#освобождаем ресурс
resource SERIAL_TX 2 NONE
#назначаем
resource ADC_RSSI 1 A02
#сохраняем
save
Теперь можно проверить работу АЦП для этого нам понадобится потенциометр сопротивлением желательно больше чем 1кОм (10кОм - оптимально). Крайние выводы нужно запаять к GND и к 3V3, средний вывод к TX2. 3V3 можно взять с питания микроконтроллера. Выводы питания можно посмотреть в STM32CubeMX. Паяться к ногам контроллера не советую, рядом с выводами питания стоят конденсаторы, можно аккуратно подпаяться тонким проводом к ним или к LDO преобразователю напряжения (оптимальный вариант), который формирует 3,3В. В BetaFlight ставим галочку использования аналогового RSSI. Вращая ручку потенциометра, наблюдаем, как изменяются показания RSSI от 0 до 100.
Подсоединяем RSSI OUT приёмника к TX2 полётника.
Схема подключения
С подключением закончили. Настройка в BetaFlight UART-ов стандартная. Дальше биндим и идём летать.
Ещё вариант подключения если у вас нет инвертора на плате полётника для SBUS. На своём полётнике я отключу его физически, выпаяв резистор из стоковой цепи MOSFET (точнее сдвинув с одного пада), таким образом инвертор не будет оказывать влияния на вход RX2 полётника.
Отключение резистора стоковой цепи (полётник уже обработан уретаном)
Конфигурация микроконтроллера для второго варианта подключения
Используем RX2 для ADC RSSI. В консоли пишем:
resource SERIAL_RX 2 NONE
resource ADC_RSSI 1 A03
save
Схема подключения для второго варианта
TX2 используем для передачи телеметрии (S.Port), соединяем его с RX1 приёмника. RX3 используем для приёма сигналов управления (SBUS), соединяем его с TX1 приёмника.
В настройках BetaFlight проставляем настройки для UART2 и UART3.
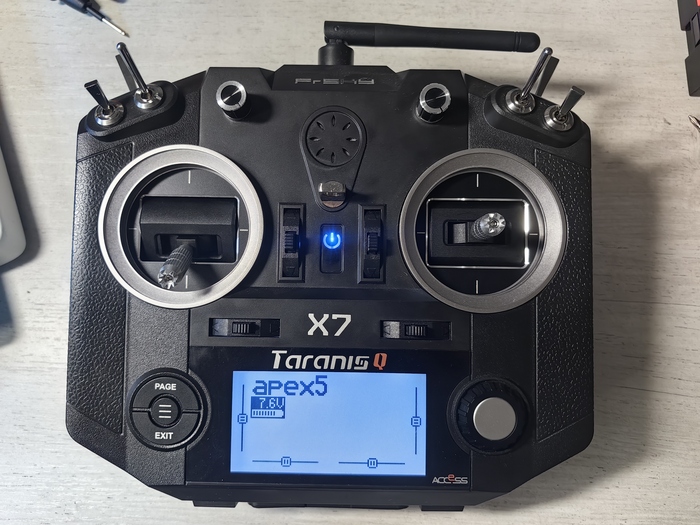
Задумал прокачать свою аппаратуру и сделать небольшой гайд по замене стоковых резистивных стиков на Gimbal-M7 (на эффекте Холла).
Сразу покажу как было.
И как стало.
Новые стики я заказывал на AliExpress, приехали они в таких пластиковых боксах.
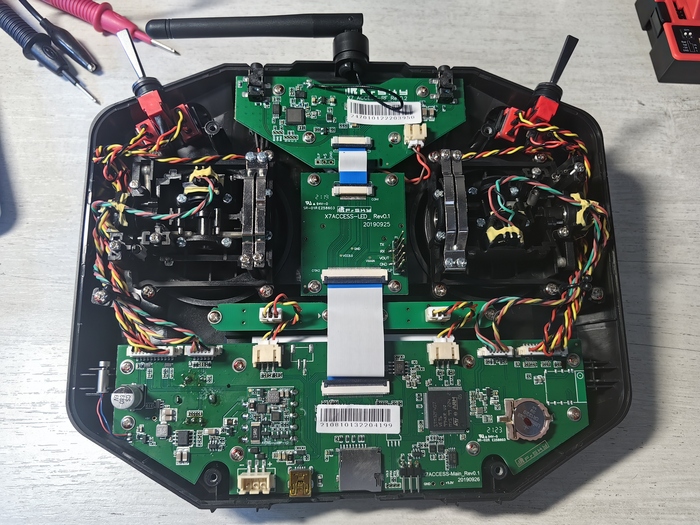
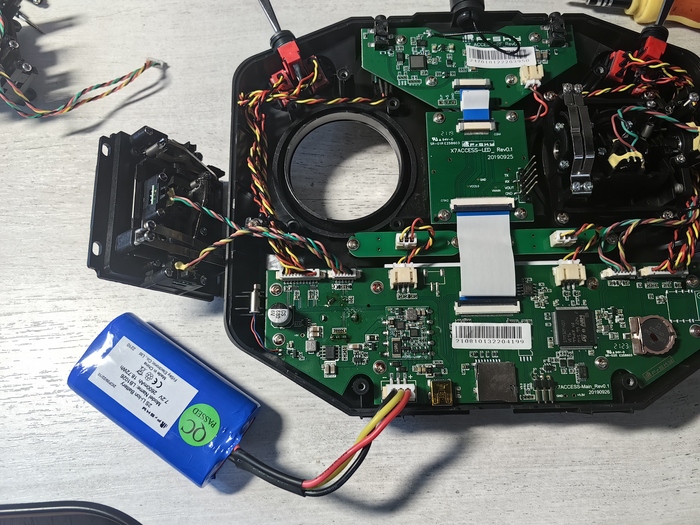
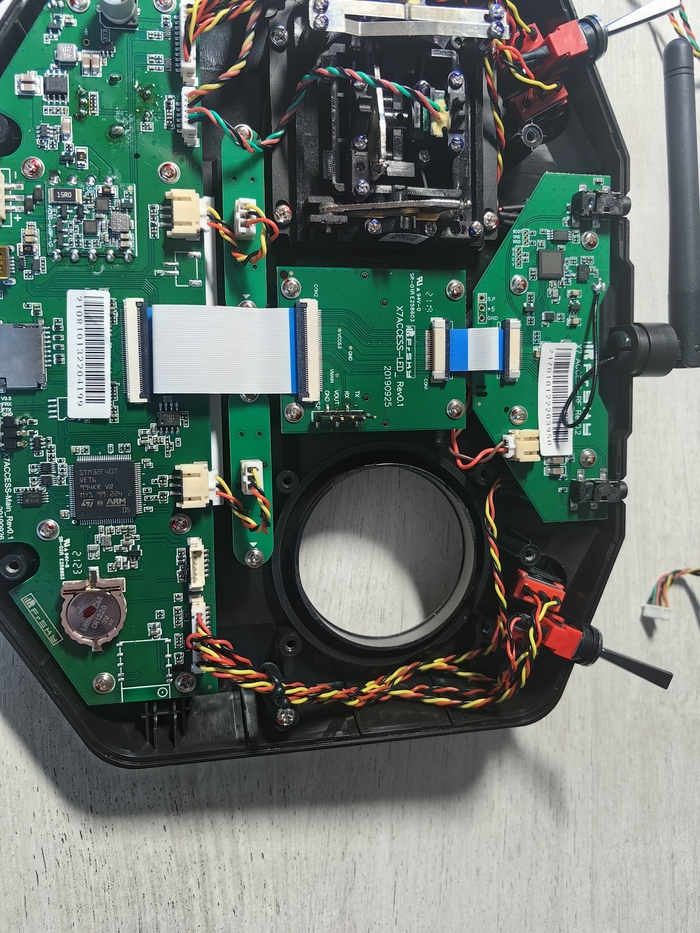
Приступим. 1. Отключаем и вынимаем АКБ, отсоединяем дополнительные модули. 2. Откручиваем четыре шурупа, удерживающих крышку.
3. Снимаем крышку.
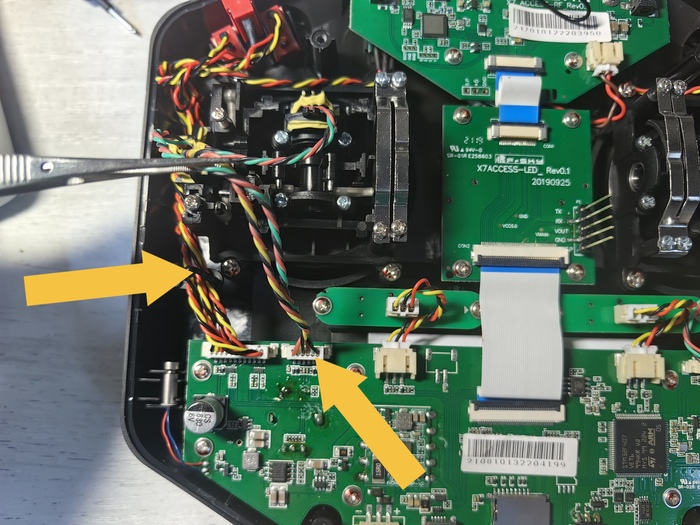
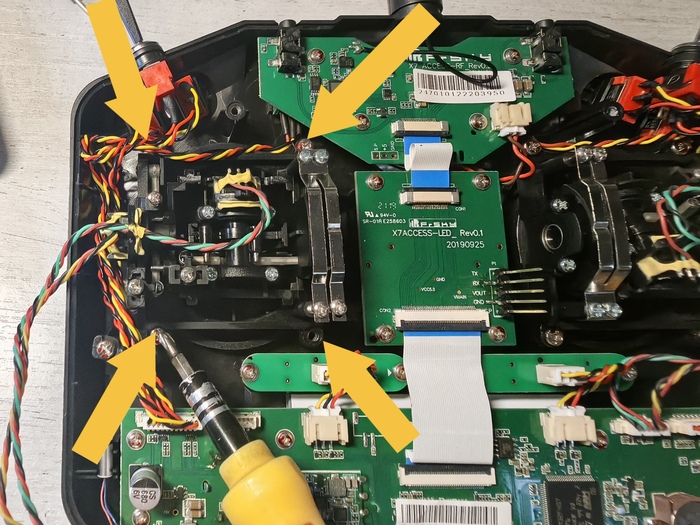
4. Начнём с правого стика. Извлекаем кабель из зажима, затем отключаем разъём от платы.
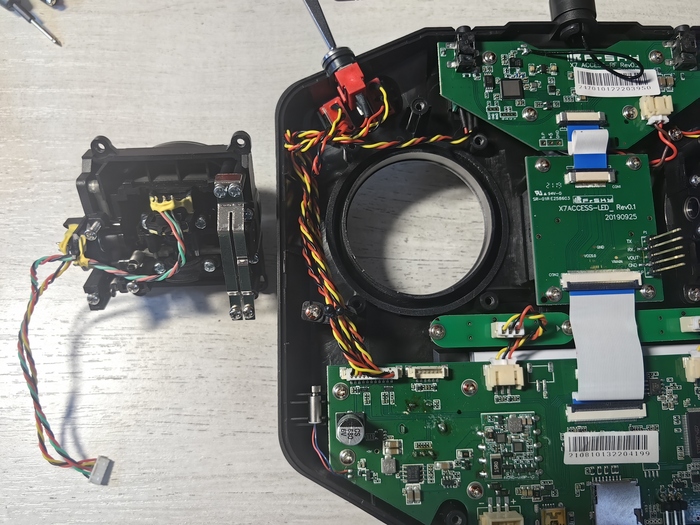
5. Откручиваем четыре крепёжных шурупа и удаляем стик.
6. Подключим новый стик, чтобы его проверить и определить положение. При отклонении стика вверх и вправо мы должны получить положительные значения, вниз и влево - отрицательные. Показания в крайних положениях могут быть вне диапазона -100 ... +100, не пугаемся, чуть позже сделаем калибровку.
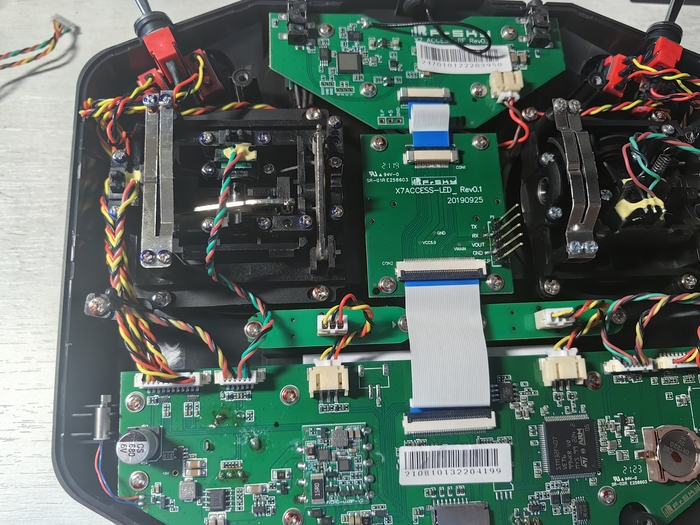
7. Прикручиваем новый стик. Провод от одного сенсора мне удалось провести через зажим, от второго будет идти напрямую к разъёму без лишнего натяжения.
8. Аналогично поступаем с левым стиком.
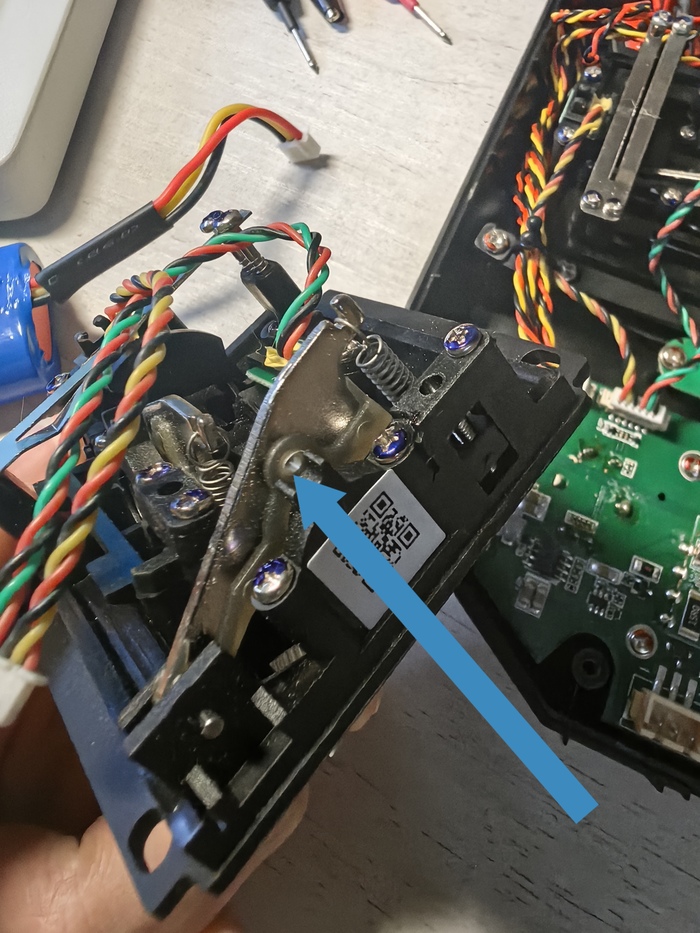
9. Чтобы получить стик "газа", уберём подпружиненность по вертикали. Отклонив стик, мы увидим специальное отверстие на качельке, туда нужно закрутить винт, идущий в комплекте со стиком. Для удобства качельку можно приподнять ручками, но без фанатизма.
Закрутите винт так, чтобы качельку не перетягивало и в тоже время она была надёжно зафиксирована. Головка этого винта будет слегка мешать установке крышки корпуса пульта, имейте это в виду при сборке.
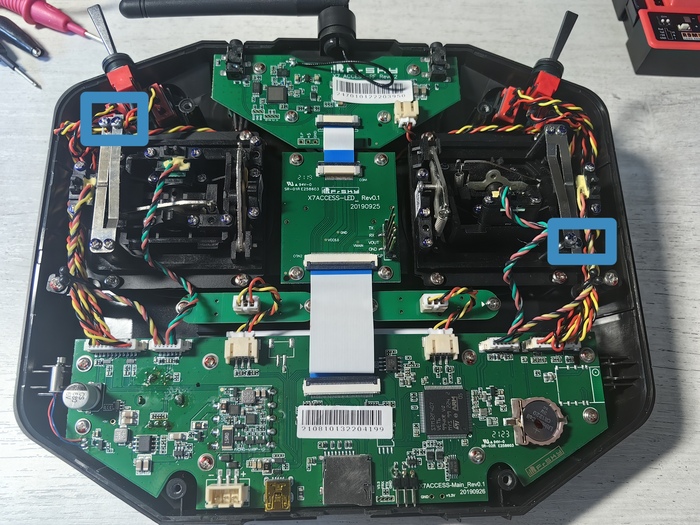
10. Устанавливаем левый стик на место, проверяем что проводам от сенсоров ничего не мешает, смотрим ход стиков. Настраиваем прижим и трещотку регулировочными винтами по вкусу.
11. Прикручиваем крышку, устанавливаем АКБ, переходим к калибровке.
Калибровка стиков. 12. После включения пульта удерживаем кнопку ||| до входа в меню.
13. Далее кнопкой PAGE листаем до страницы HARDWARE
14. На странице у нас уже выбран раздел калибровки, поэтому подтверждаем его нажатием на OK.
15. Для старта калибровки нажимаем OK.
16. Сейчас нам нужно установить стики в среднее положение. Правый стик у нас подпружинен по двум осям, поэтому его не трогаем, выставляем только стик "газа" на середину, не по экрану, а физически стик должен стоять перпендикулярно. Нажимаем ОК.
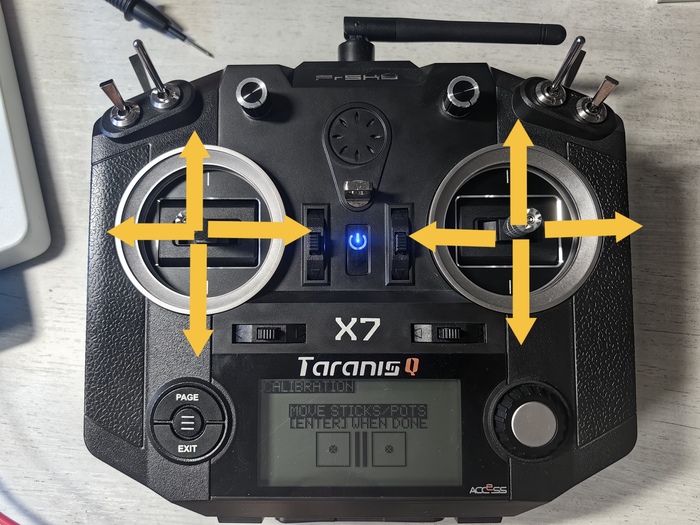
17. Теперь нам нужно максимально отклонить стики для фиксации максимумов и минимумов. Сделать это можно, отклонив стики от среднего положения вправо, влево и вверх, вниз до упора, затем круговыми движениями по часовой и против часовой стрелки также до упора.
Нажимаем OK по завершению.
18. Выходим из меню калибровки на главный экран при помощи кнопки EXIT. Кнопкой PAGE ищем экран отображения данных со стиков. В среднем положении значения должны быть близки к нулю, а в крайних -100 и +100. Повторяем калибровку при необходимости.