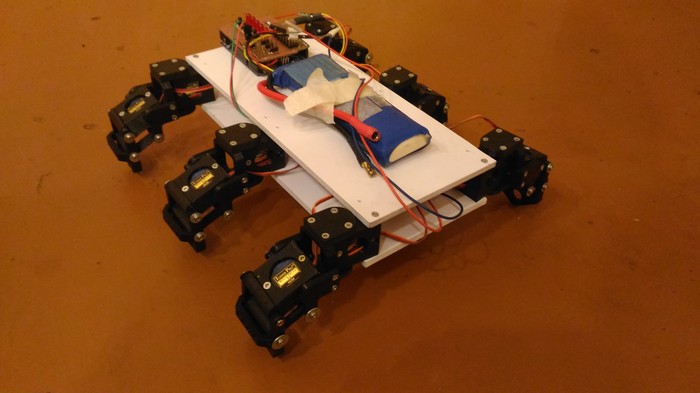
Пробная платформа с шестью ножками на Arduino-Uno.
Возник интерес самому сконструировать гексапода. В качестве такой действующей лаборатории для изучения программирования.
Посмотрел разные статьи в интернете, решил начать с простых ног - на 2-х сервоприводах. Ну почему у меня все получается так сложно?
Даже на этапе рисования в редакторе выглядит пугающе. После печати, количество деталей зашкаливает.
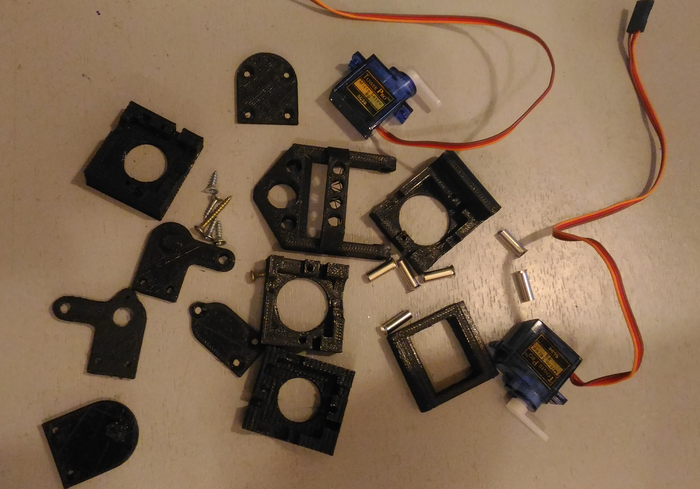
Даже смотрю, одной детали не хватает. Ну что, напечатаем и соберем все шесть.

С платформой мудрить не стал, просто вырезал из листового ПВХ 5мм. А вот шилд решил сделать. Просто так удобнее настраивать - устанавливать "нули" сервоприводах и подключать всякое дополнительное. Нарисовал в KiCad, попросил MDIMAN выпилить платку на своем ЧПУ станке, спаял и не жалею. Действительно удобно.

Еще что хотелось добавить - построить гексапода - не самоцель. Просто интересно, а получится ли напрограммировать ему всякую разную походку, не подсматривая в чужие скетчи, а используя только свои слабые знания.
Кое что уже получилось, можно посмотреть на коротком, полутораминутном видео.
Теперь надо прикрутить радиоуправление - это уже я освоил, ну и поворачивать научить)
А потом можно и походки повеселее программировать.