

Робот из бутылок
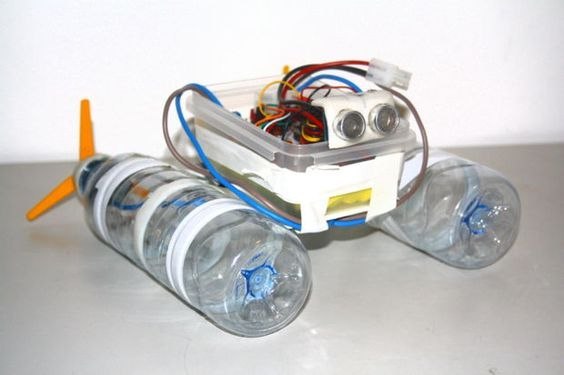
Найдено на просторах интернета, может такой же сделать?
Найдено на просторах интернета, может такой же сделать?
Всем привет!
Сегодня публикую вторую часть по теме "Матричная клавиатура"
Прикрепляю, как обычно, видеоурок по данной теме.
Рассмотрим на этот раз несколько схем с применением данной клавиатуры, попробуем управлять несколькими светодиодами, реле, ну а главной изюминкой данного видео станет КОДОВЫЙ ЗАМОК
Я прилагаю программный код для кодового замка, наиболее простой в плане длины и объема, в видео все подробно объясняю, так что думаю данная схема будет вам понятна и проста.
Также ее легко можно дополнить своими условиями и подогнать под свои параметры.
Статья про первую часть про матричную клавиатуру тут: http://pikabu.ru/story/matrichnaya_klaviatura_i_arduino_chas...
Схемы подключения, библиотеки и коды скачать можно здесь: https://yadi.sk/d/BIuU18QT3FaXvd
В своих предыдущих постах я описывал несколько вариантов платформ, созданных в FreeCad и изготовленных при помощи 3D принтера, а именно:
- двухколесная с дополнительными опорами,
- четырехколесная с полным приводом через редуктор,
- гусеничная,
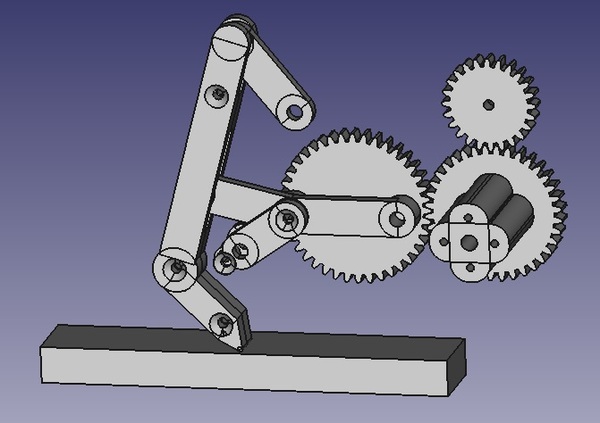
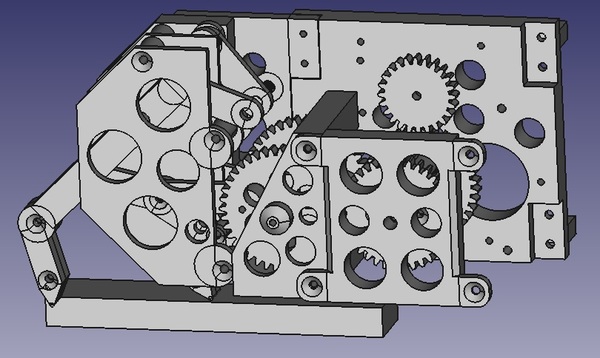
и вот теперь крайняя в этой серии платформ, созданных для изучения их достоинств и недостатков, шагающая.
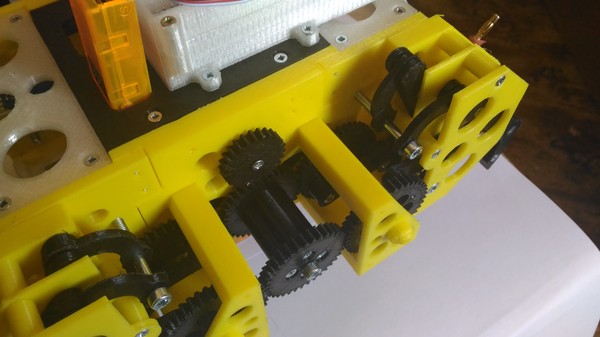
Для постройки этой платформы я выбрал принцип механизма Кланна - мне показалось, что его легче реализовать. Тем более, что в Википедии есть не только подробное описание, но и пример координат опорных точек механизма в относительных единицах. Взяв эти координаты за основу в масштабе 1=50мм, я смоделировал это в FreeCad.
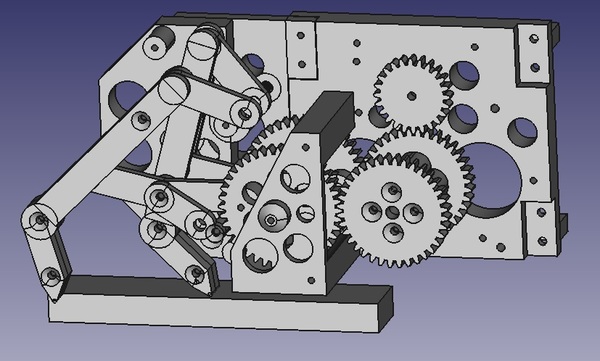
Поскольку трудно избавиться от люфтов, пришлось, чтобы ноги у платформы не заплетались на поворотах, добавить между ними детали-разделители
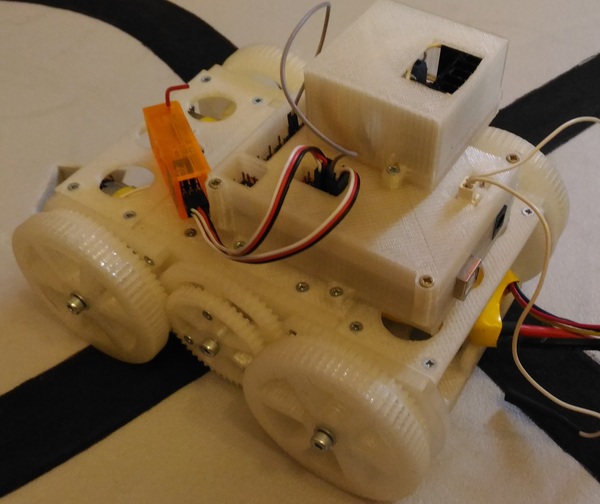
Сразу хотелось бы сказать, что я сделал бы по-другому, если бы еще раз проектировал такую платформу. Я бы увеличил клиренс, он тут всего 10мм.
Для ходовых испытаний я воспользовался той же схемой, что и на четырехколесной платформе, а попросту взял разобрал и использовал от нее всю середину, моторы и Ардуино с шилдом. Процесс создания мне показался сложноватым, я даже начал в себе сомневаться, но оно заработало!
Как видите, бегает на своих восьми ножках.
Теперь о недостатках:
-сложность конструкции,
-"острые ножки", весь пеноплекс поганый истоптал),
- недостаточная точность поворотов, что может отрицательно сказаться на написания программ для работы в автоматическом режиме.
Положительное:
-все-таки бегает и управляется,
-экзотичный,
-смешно наблюдать, как он бегает по комнате.
Теперь подытожу. Для дальнейшего использования с разнообразными датчиками и манипуляторами в автоматическом режиме, из четырех платформ наиболее понравились двухколесная за простоту и точность управления и гусеничная, которая сложнее, но не уступает в остальном двухколесной, имея, однако, преимущество в виде повышенной проходимости (неровности площадки не являются для нее непреодолимым препятствием).
В своих предыдущих постах я уже писал о двухколесной платформе с двумя опорами, а также о четырехколесной полноприводной платформе. Продолжая тестировать различные виды платформ, я изготовил на этот раз гусеничную платформу. По традиции, платформа была смоделирована во FreeCad, а затем детали были распечатаны на 3D принтере МС5. Немного мелочи из магазина крепежа и платформа поехала. Модуль с платой Ардуино-Уно, шилдом и драйвером моторов был снят с четырехколесной платформы, о которой я писал ранее. В этом случае для проверки ходовых качеств была использована авиамодельная аппаратура, чтобы проверить движение в разных режимах.
О гусеницах. Каждая состоит из 67 траков. Одна из гусениц собрана с использованием вместо "пальцев" обычных английских канцелярских булавок, у которых я откусил кольца-ушки. Для второй гусеницы я применил финишные гвозди диаметром 1,2мм, также с откушенными шляпками.

Обе гусеницы работают на вид одинаково, однако надо их погонять и посмотреть по износу. Боюсь, что толщина иголки 0,7мм слишком мала и быстро протрет пластик. Я запланировал построить еще один вид платформы, поэтому только опробовав и ее, подведу окончательные итоги и сравню достоинства и недостатки.
Платформа на 2-х колесах, о которой я писал в своих постах ранее, имеет существенный недостаток - ей нужна абсолютно ровная поверхность. Поэтому появилась мысль нарисовать во FreeCad, а затем напечатать на принтере полноприводную четырехколесную. Только не на 4-х моторах, а на 2-х, используя напечатанный редуктор.
Не успев доделать платформу (спереди и сзади должны быть установлены консоли для крепления сенсоров), я очень захотел проверить ее ходовые качества. Взгляд мой упал на мою авиамодельную аппаратуру, которую решено было использовать для управления платформой, чтобы погонять ее в разных режимах.

Быстренько подоткнув на аналоговые входы выходы управлением рулем высоты и элеронами с приемника, я заглянул в монитор порта и понял, что я идиот. Выход с приемника - это ШИМ и все немного сложнее. Пришлось попыхтеть немного, но родился-таки тестовый (но рабочий) вариант кода. Вывод в монитор порта оставил - для настройки/проверки. Ходовые качества еня удовлетворили, можно цеплять датчики.
Таким образом, я убедился, что для испытаний использовать авиамодельную радиоаппаратуру очень даже удобно. Если кого-то заинтересовало, то:
Плата Ардуино-Уно, драйвер моторов - L298n, шилд - самодельный.
Код, который я выложил, для использования без этого шилда, придется немного модифицировать. Конструкция шилда позволяет использовать для управления одним мотором один пин ШИМ Ардуино (скорость) и один пин цифровой (направление). Если использовать без шилда, то просто нужно добавить для управления направлением вращения еще один пин.
В своих предыдущих постах я уже упоминал о проекте Скретчдуино. Теперь хочу поведать, почему я решил рассказать об этом поподробнее. Еще пару лет назад я не думал, что у меня появится хобби, связанное с программированием контроллеров. Несмотря на то, что моя нынешняя работа связана с компьютерной техникой, программированием я не занимался. Теперь предыстория. Однажды жена, приехав с конференции по развитию образования рассказала, что посетила мастер-класс по программированию роботов для детей. Ей очень понравилось, что всего за час участники этого мастер-класса смогли написать простенькие программы и опробовать их на роботах. Однако представители не смогли показать никакой внятной документации к этому проекту. Руководитель проекта посетовал на отсутствие времени и методической помощи, а потом предложил взять робота и попробовать что-нибудь написать.
И тут она достает из сумки коробку с роботом, и говорит, что надеется на мою помощь. А я программировал последний раз в далеком 1989 году, когда студентом писал лабораторные работы в институте на ПК ДВК-4, на Паскале. Причем изучать пришлось самому, в школах тогда информатику не проходили.
Ну что ж, установив ПО, я понял, что многое, оказывается, помню. Очень быстро робот начал выполнять несложные задания. Язык Скретч очень прост, визуализирован, программа составляется из блоков очень быстро. Вот пример простого кода. Робот доезжает до края стола, отъезжает от него и издает звук.
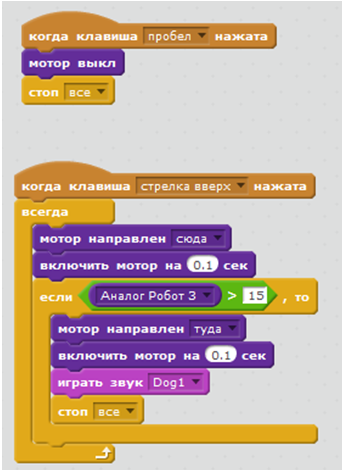
Клавиша "пробел" для экстренной остановки.
Как видите, все легко и просто. Короче говоря, у нас получилось целое руководство пользователя (можно скачать). Быстро исчерпав возможности робота, управляеого с копьютера при помощи программы Скретчдуино, я очень легко перешел на программирование в Ардуино. Таким образом, Ардуино стало моим хобби.
Посмотреть на робота, которого продают, можно на официальном сайте.
Как видите, главный недостаток - это достаточно высокая стоимость. Но разве мы не инженеры? Достоинство проекта в том, что все лежит в открытом доступе. Начиная от ПО и заканчивая чертежами, схемой, документацией на печатные платы и т.д.
Мне сразу же пришло в голову построить робота под эту программу на китайском клоне Ардуино, что я и сделал.
Что еще интересного хотелось бы рассказать об этом проекте. Чтобы не заморачиваться с установкой ПО, драйверов и так далее, можно скачать образ флешки с установленным Линуксом, где уже установлено все нужное ПО - Arduino IDE, Скретчдуино 2.0. После скачивания образа, останется лишь записать его на флешку с помощью, например Unetbootin и выбрав при загрузке компьютера загрузку с этой флешки, сразу подключать робота. Ну и линукс на флешке - можно попользоваться и носить свою систему с собой в кармане, запустить ее можно на любом компьютере.
К сожалению, в Windows программа не видит робота, если установлен китайский клон Ардуино. Но и не страшно - флешка же есть.
Теперь ссылки того, что можно найти в абсолютно свободном доступе:
Здесь можно посмотреть на учебные материалы.
Здесь можно скачать документацию для изготовления.
Здесь можно скачать образ флешки с линуксом и установленным ПО.
Это вики проекта.
Прошивка находится в Скретчдуино 2.0, она заливается автоматически при запуске программы.
Надо сказать, что я тестировал устройство на дочери 12 лет, она саостоятельно прочитала руководство и придумала собственные задания для робота. Вообще детям и подросткам нравится быстрый успех и программирование здесь не исключение. Хоть я далеко не подросток, но познакомившись с этим проектом, приобрел интересное хобби - Ардуино. Если кого-то заинтересует, готов отвечать на вопросы.
Как видно на фотографиях роботов в моих постах:
3D редактор FreeCad. Использование простых элементов для моделирования деталей роботов Arduino
3D моделирование деталей для роботов и редактор SketchUp
детали, из которых они собраны, не все изготовлены при помощи 3D печати. Платформы, на которых крепятся все элементы конструкции, изготовлены на станке ЧПУ. Вот об этом станке я и хочу рассказать. Сначала немного предыстории. Коллега по работе, зовут его Дмитрий, загорелся идеей постоить ЧПУ станок, только чтоб недорого. Но никак не мог выбрать конструкцию и все время переживал из-за этого, пытаясь привлечь меня к обсуждению. Поскольку я раньше этим не занимался, то залез в интернет, посмотрел, что другие делают, и, поскольку не был уверен в качественном результате, предложил собрать конструкцию из самого, что ни на есть дешевого материала: досок, мебельных направляющих и резьбовых штанг 8мм. После апробации же, отметив все недостатки, построить уже финальный вариант, используя более серьезные и качественные материалы и комплектующие. Поскольку автором чертежа с размерами был я, так и ставлю - моё. Подробнее об этом можно прочитать здесь:
Самодельный станок с ЧПУ
В прцессе эксплуатации станка выявились следующие проблемы:
- люфты из-за несовершенства конструкции мебельных направляющих (было решено добавкой на каждую ось еще пары направляющих),
- люфты в моторах и переходных муфтах (было решено переделкой узла подачи: конец резбового вала был жестко закреплен в подшипнике).
И тут произошла интересная история. После всех переделок, качество работы станка стало хозяина станка устраивать и делать более совершенный вариант он передумал. Дмитрий никогда не отказывает вырезать что-то для меня, и я качеством доволен. На видео ниже станок режет печатную плату шилда для робота на базе Arduino Uno. На фотографии я показал небольшой косячок, но он не по вине станка, просто текстолит в этом уголке примят и тоньше:

А вот, собственно видео работы станка, как видите, он со временем оброс всякими мини-пылесосами и прочими украшениями:
Для всех поклонников футбола Hisense подготовил крутой конкурс в соцсетях. Попытайте удачу, чтобы получить классный мерч и технику от глобального партнера чемпионата.
А если не любите полагаться на случай и сразу отправляетесь за техникой Hisense, не прячьте далеко чек. Загрузите на сайт и получите подписку на Wink на 3 месяца в подарок.

Реклама ООО «Горенье БТ», ИНН: 7704722037
Несмотря на то, что предыдущий пост в горячее не вышел, все же опубликую вторую и заключительную часть ознакомительного рассказа о SketchUp, в которой будет рассмотрено создание корпуса для Arduino Uno, установленной на роботе.
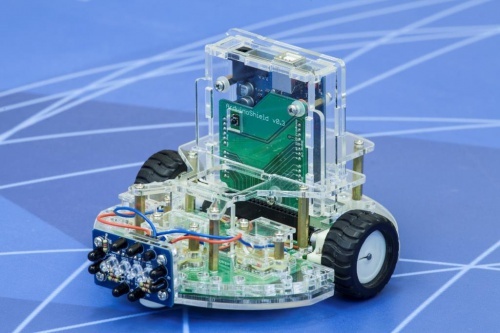
Сначала небольшое отступление. Несмотря на то, что я пользуюсь 3D редакторами, в основном, для создание различных деталей для учебной робототехники, диапазон применения этих редакторов широк, поэтому применяю их и в быту. Несложно в SketchUp нарисовать что-то для ремонта бытовой техники или детской игрушки.
Например эта деталь почти год крутит тарелку на старой микроволновке (родная деталь почему-то после 3-х лет работы надумала сгореть)
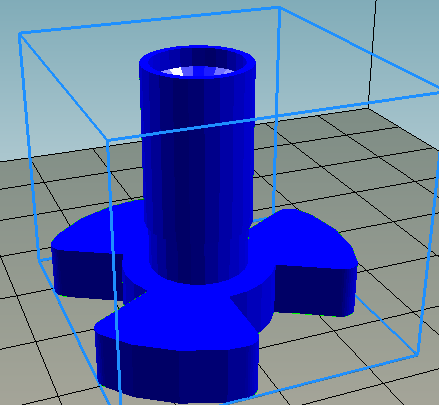
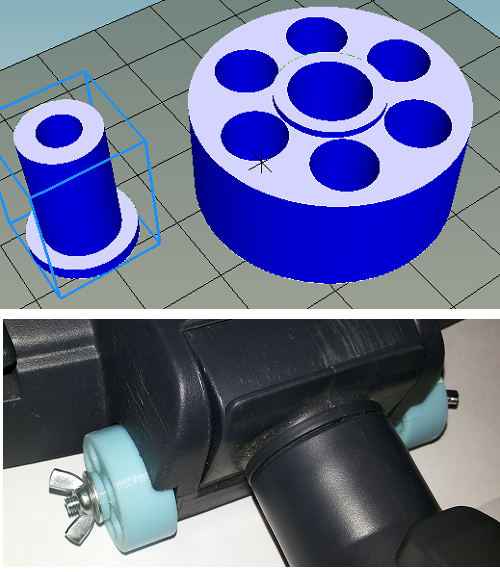
Жена, расстроенная тем фактом, что от щетки нового пылесоса стали отваливаться колеса, обрела душевное спокойствие:
Ну а это просто игрушка - конструктор, такая как в шоколадном яйце прячется, только 100мм диаметром. Нарисовал этот домик для смурфиков просто на спор в SketchUp-е:

Ну и теперь вернемся к роботам и "Ардуинам". Пошаговая инструкция по созданию корпуса для робота из предыдущего поста доступна по ссылке:
Основы работы в 3D редакторе SketchUP. Часть 2
Конечно же, предполагается, что тот, кто будет пробовать создать модель по этой инструкции, уже освоил навыки, создав модели по первой ее части:
