



Изготовил рыболовные санки (кораблик) для ловли хариуса, ленка, голавля, жереха и др
Видео об изготовлении самого кораблика в описании к этому видео!


Как спрятать бутыль с вискарём)
Источник: ТГ канал Стройка
Подписывайтесь на наше сообщество на Пикабу Стройка. Интересные решения
Это что за аппарат...





Показать полностью
5


Универсальное транспортное средство (часть 3)
Накатав на двух трайках за лето более 3000 километров, мы до конца поняли как должно быть.
1 - педали не нужны. Наличие педалей накладывает кучу ограничений, усложняет конструкцию, требует ставить сидение, неудобное для бездорожья.
2 - передняя подвеска должна быть абсолютно независимой, без маятников. Как у квадроцикла не подходит, в поворотах получается сильный крен.
3 - центр тяжести должен быть максимально низким, располагаться на пересечении лучей треугольника, образуемого пятнами контакта колес.
4 - мощность двигателя нужно делать не менее 1квт, а акумулятор должен обеспечивать автономный пробег не менее 100км.
5 - вес устройства с АКБ не должен превышать 40кг.
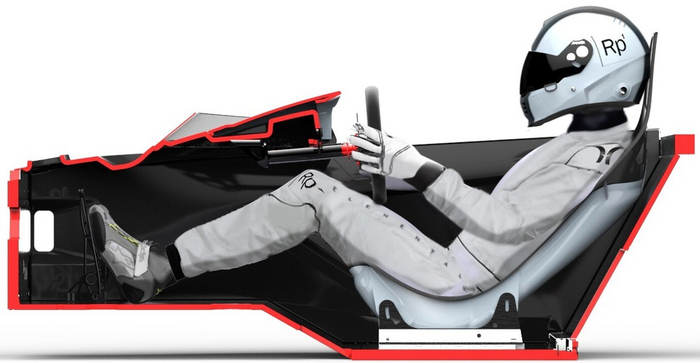
6 - поза пилота должна быть схожа с Формулой 1.
Одной из первых деталей для проекта было добыто сиденье. Это стеклопластиковое ложе для легкомоторного самолета. Согласитесь, уже неплохой задел? Поскольку в нем будет размещаться самое ценное, мы немножко усилили его стальным каркасом.
Когда не нужно крутить педали, можно ставить удобное сиденье, запомните это. А педали, как мы помним, не нужны.

Создание каркаса
Чтобы законсервировать стеклоткань, покрыли эпоксидным грунтом, сверху акриловым и тремя слоями матовой эмали. Получилось хорошо. Даже очень.

2 разных грунта и 3 слоя эмали
Следующими приехавшими деталями оказались передние колеса, а точнее втулки под ось 20мм для консольного крепления, обода под широкие покрышки, тормозные диски 203мм, спицы и сама резина. Всё это превратилось в два отличных колеса.

колеса 20" 36 спиц, втулка для консольного крепления под ось 20мм
Токарного станка у нас нет, поэтому пришлось расчехлять навыки черчения.
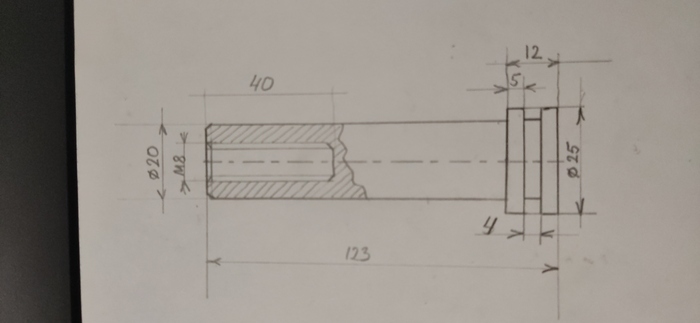
чертеж оси
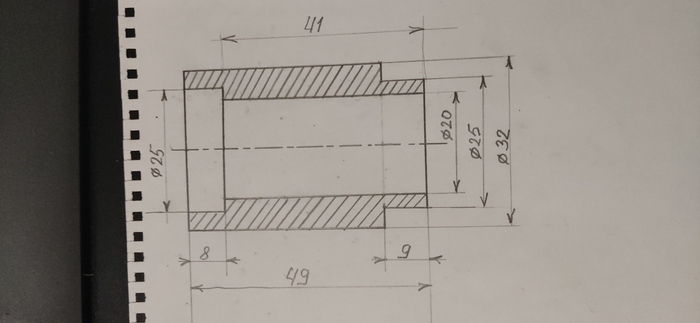
чертеж втулки

спасибо токарю, он молодец
Потом мы приварили к втулкам восьмигранные штоки амортизатора.

Ответные части рулевых колонок через болты соединили с будущими рогами рамы

Собирать раму начали спереди

Добавили рулевой механизм и адаптировали к раме сиденье

Появился некий узнаваемый облик. В следующей серии будет задняя подвеска, тормоза, рулевое управление. Это интересно, поверьте.
Показать полностью
10

Настоящий БАТЯ))
Источник: ТГ канал Стройка
Подписывайтесь на наше сообщество на Пикабу Стройка. Интересные решения


Как я собирал намоточный станок для намотки катушек звукоснимателей

Несмотря на то, что студенческие годы далеко позади, электрогитара и увлечение музыкой остались в моей жизни как хобби. А инженерный бэкграунд и неугасаемое любопытство привели к тому, что несколько месяцев назад я увлёкся темой изготовления звукоснимателей и начал погружаться в этот удивительный мир, изучая и конспектируя литературу. Но теория должна подкрепляться практикой, поэтому в какой-то момент мне понадобился намоточный станок и я решил его изготовить самостоятельно. В наличии имеется 3d-принтер, в Компас 3D работать немного умею и с Arduino факультативно знаком, а вот с ТММ (Теория Машин и Механизмов) уже всё гораздо печальнее, но это не повод сдаваться!
О намотке катушек звукоснимателей
Данная статья именно про изготовление намоточного станка, но так как планируется мотать катушки звукоснимателей для электрогитары, то придётся учитывать определённую специфику при его проектировании.
Для начала разберёмся с типами намотки, их всего 2:
Ручная намотка - двигатель вращает катушку, а оператор контролирует натяжение и укладку провода (провод скользит между пальцев). Повторяемость характеристик при таком методе намотки остаётся весьма условной и зависит от опыта оператора. Отсюда и легенды про гипотетическую "бабу Зину с Фендера", которая в 60-х мотала датчики с "тем самым" звуком :) В наше время, звукосниматели намотанные вручную, называют "бутиковые" - звучит солидно, хоть и сомнительно.
Автоматическая намотка - шаг намотки, натяжение, скорость, паттерн укладки - всё контролируется высокоточным станком с ЧПУ. Тут уже не забалуешь, поэтому повторяемость характеристик остаётся высокой, что на мой взгляд является несомненным преимуществом.
Оба типа намотки остаются сегодня востребованы, но станок для ручной намотки значительно проще по своей конструкции, поэтому я решил двигаться от простого к сложному и остановился на первом варианте. Но от идеи создания станка для автоматической намотки я не отказываюсь - некоторые наработки имеются.
Теперь про толщину провода - он очень тонкий. Например если взять тот же AWG 42, то диаметр медной жилы составит всего 0,0635 мм. Мотать такой провод нужно очень осторожно - лишние нагрузки могут привести к его растяжению или обрыву, а ни того, ни другого мне не надо.
Первый неудачный прототип станка
Первый вариант намоточного станка оказался не очень удачным, так как я несколько спешил - уж очень хотелось послушать как звучит "бутиковый" звукосниматель :D
Однако этот прототип очень наглядно продемонстрировал все возможные проблемы и после их устранения мне удалось добиться нужного качества намотки, поэтому я считаю чрезвычайно важным его продемонстрировать.
Началось всё со сборки макета и написания к нему скетча:
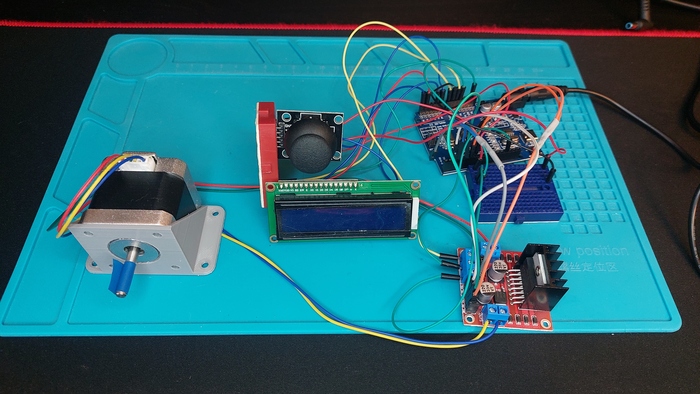
За основу я взял Arduino UNO (точнее плату c Aliexpress, внешне напоминающую Arduino UNO), так же заказал джойстик и дисплей 1602 + I2C, чтобы задействовать минимум пинов на плате.
Чтобы было удобно задавать точное число витков, я решил использовать биполярный шаговый двигатель HANPOSE 17HS4401 в форм-факторе Nema 17. Двигатель реально классный, одно удовольствие с ним работать! А вот с драйвером я промахнулся и вначале поставил L298N. Он достаточно быстро нагревается и двигатель начинает пропускать шаги - это уже выяснилось в процессе намотки первых образцов. В последствии я поставил драйвер TB6560, который отлично справляется со своей задачей.
Далее в Компас 3D я спроектировал первые детали станка, в том числе корпус и основание и распечатал, после чего начал сборку:
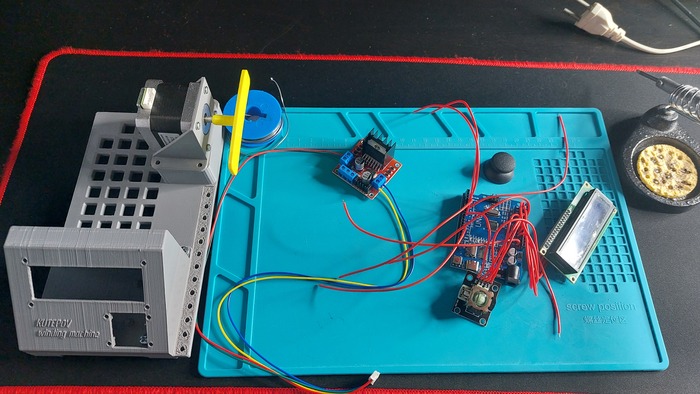
Само основание сделано так, что можно добавлять разные модули - это очень помогло обкатать некоторые конструктивные решения, затем улучшить их. А вот корпус блока управления нужно было сделать разборным - поместить туда всю электронику и закрутить гайки - было отдельным квестом. На фото ниже частично собранный станок:
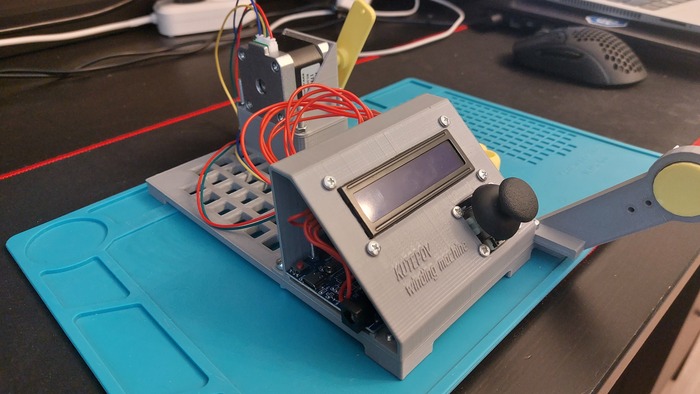
Далее был допечатан укладчик и проведены первые испытания:
Теперь я расскажу о проблемах данного решения:
Начну с программного обеспечения - для управления шаговым двигателем первоначально я использовал стандартную библиотеку Stepper. К сожалению она не сильно гибкая в настройках и подходит только для самых простых случаев. Например двигатель запускался сразу с заданной скоростью без ускорения, что создавало в моменте высокую нагрузку на провод и он просто рвался. В итоговом скетче, который будет ниже, использована другая библиотека - AccelStepper.
На укладчике нет ни демпфера, ни натяжителя - предполагалось что я буду слегка притормаживать бобину рукой, но это оказалось плохим решением. Можно было просто выкинуть укладчик из конструкции и укладывать провод пальцами, но мне захотелось чтобы натяжение контролировалось именно станком - таким образом можно было бы свести к минимуму обрывы провода.
С держателем бобины тоже не всё гладко - бобина раскручивалась по инерции и провод путался, а если её притормаживать рукой, то через некоторое время происходил обрыв от малейшего неосторожного движения. Появилась задача придумать очень деликатный тормоз бобины: провод должен сходить максимально легко, при этом бобина не должна раскручиваться по инерции и путать провод.
Работа над ошибками и итоговый вариант
Я распечатал совершенно новый держатель бобины:
Здесь уже 2 точки опоры вала и запроектирован магнитный тормоз на небольших неодимовых магнитах (5х2 мм). Усилие можно регулировать как количеством магнитов на тормозном диске, так и расстоянием между магнитами, которое регулируется на держателе. Готовый держатель бобины выглядит так:
На держателе по кругу расположены 10 магнитов и ещё буквально по паре магнитов на тормозных дисках с 2-х сторон, на мой взгляд этого достаточно для создания оптимального усилия - тут главное не переборщить. Вал с катушкой установлен на подшипники 608ZZ, таким образом вращение достаточно свободное, чтобы легко сходил провод, но при этом магниты не дают бобине раскручиваться по инерции.
Далее настала очередь укладчика - нужно было сделать конструкцию более жёсткой, добавить демпфер и регулируемый натяжитель провода. Демпфер нужен для компенсации дополнительной нагрузки на провод, которая возникает из-за вытянутой формы катушки.
Кроме этого, был случайно проведён незапланированный краш-тест станка, в результате чего уцелели не только лишь все детали. Пришлось в качестве основания взять лист фанеры размером 30х30 см. и смонтировать всё заново.
Вот так выглядит обновлённый укладчик:
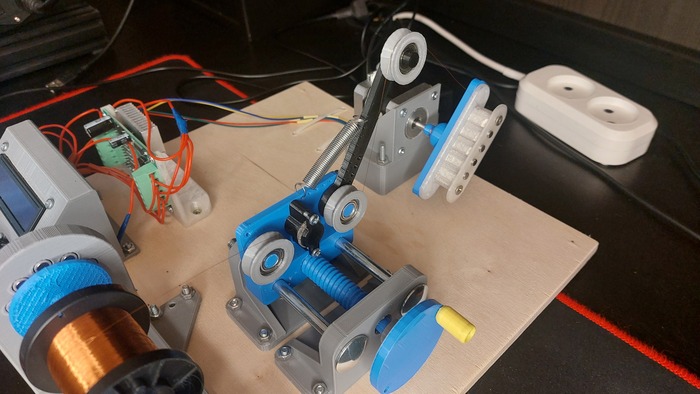
Конструкция стала более жёсткой, люфты ушли. Вместо прецизионных валов я использовал гладкие мебельные болты DIN603 (8х100 мм) из Леруа Мерлен - по ним прекрасно скользит укладчик. Для станка с автоматической намоткой такой номер не пройдёт - там очень важна точность, а для ручной намотки такое решение очень даже подходит.
В качестве демпфера выступает журавль на пружине и ограничителем хода. Основание журавля установлено на подшипник 688ZZ, чтобы избежать лишних люфтов. Те же подшипники используются в роликах. А вал червячного механизма уже на подшипниках 608ZZ.
В качестве натяжителя выступает конструкция, которая зажимает проволоку между двумя войлочными дисками - это довольно распространённое решение и тоже показывает себя хорошо на практике. Винтами можно регулировать силу натяжения провода, от которой в конечном итоге зависит и качество намотки, и характеристики катушки. Для станка с автоматической намоткой натяжение необходимо ещё и измерять, чтобы можно было точно отрегулировать станок.
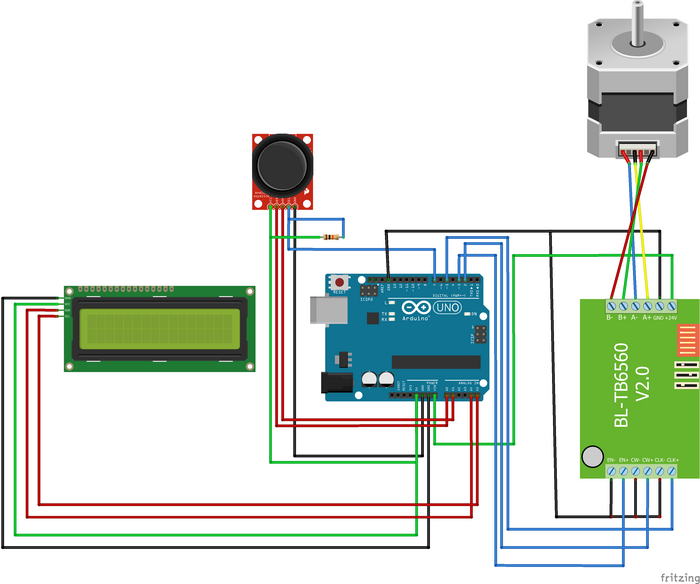
На заднем плане виден новый драйвер шагового двигателя - TB6560, про который я рассказывал ранее. Он хорошо справляется со своей задачей и не перегревается при долгой работе + в нем присутствует масса настроек (ограничение тока, делитель шагов). Такой драйвер можно использовать и для станка с автонамоткой.
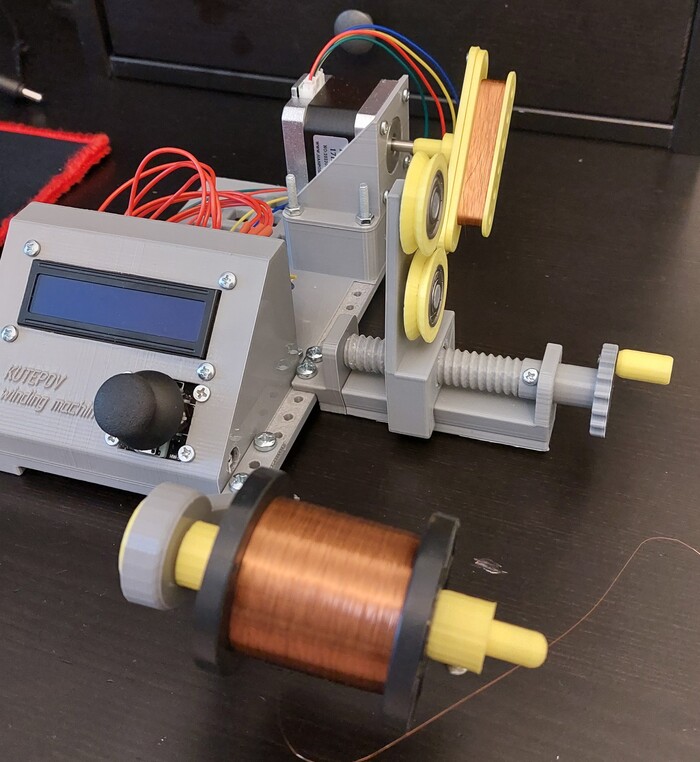
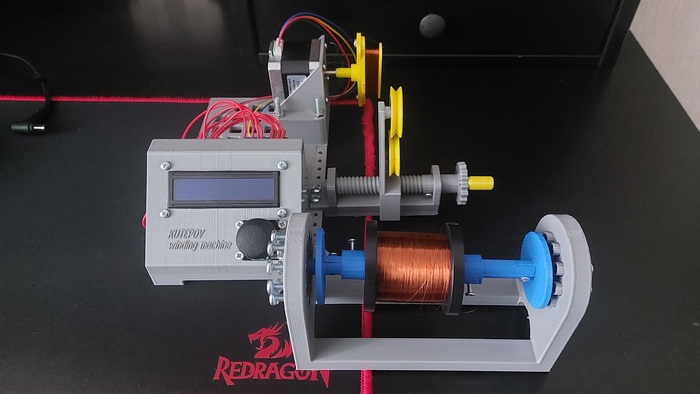
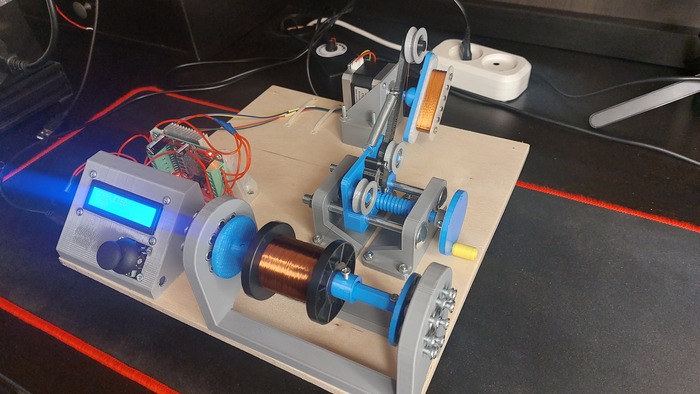
Готовый результат
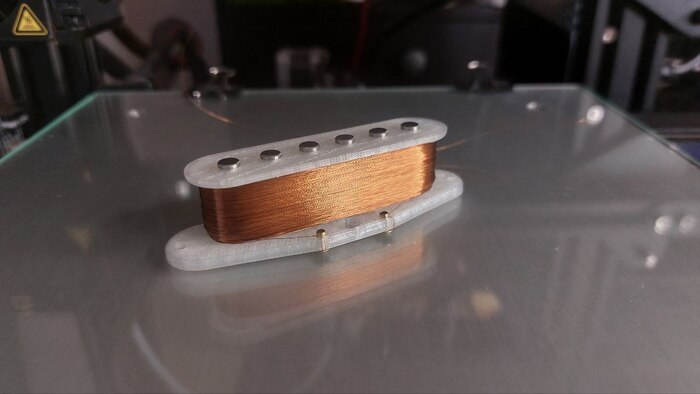
Так выглядит готовый станок целиком. На этом фото уже намотана первая тысяча витков на катушку звукоснимателя:
Впечатления от станка у меня положительные, работать укладчиком вполне удобно, провод пока ни разу не порвался в процессе намотки и натяжение провода постоянное. Все проблемы первой версии исправлены и появились наработки для того, чтобы в будущем сделать станок уже с автонамоткой. Но, как я уже писал, для автонамотки требования к станку значительно выше и конструктивные решения будут совсем другими, иначе не получится выдержать точный шаг и укладка провода будет идти плохо.
Общая схема электронной начинки станка выглядит так:
Ну и конечно же сам скетч: https://github.com/AlexeyKutepov/winding-machine/blob/main/winder.ino
В меню станка есть 2 настройки: число витков и скорость намотки. Запуск двигателя происходит плавно с ускорением, а остановка с замедлением, что исключает возникновение ударной нагрузки на провод. После того, как заданное число витков намотано - двигатель останавливается, а намотанное количество запоминается - это позволяет мотать катушку в несколько этапов и по завершении каждой итерации на экране будет высвечиваться точное число намотанных витков на катушке.
Метод runToPosition() является блокирующим, так что подсчёта витков в режиме реального времени нет. Данный метод не рекомендуется вызывать в цикле, как сделано у меня - в библиотеке AccelStepper есть асинхронные методы, которые предназначены для вызова в цикле, но нужно обеспечить при этом быструю работу самого цикла. В моём случае такой возможности нет, так как та же операция обновления экрана не очень быстрая, а ещё нужно проверять состояние кнопок с поправкой на дребезг контактов. Можно добавить ещё одну плату Arduino только для управления двигателем и обеспечить уже там быстрый цикл, а первую плату оставить на пользовательский интерфейс и настроить обмен информацией между ними, тогда должно получится отображать число намотанных витков уже в процессе намотки без ущерба скорости вращения двигателя, но в данном станке такую доработку выполнять я не планирую.
Результат работы намоточного станка
С помощью данного намоточного станка я успешно изготовил первые образцы звукоснимателей и теперь они проходят испытания:
Он же в одной из моих электрогитар:

Про сами звукосниматели рассказывать пока рано - ещё предстоит много экспериментов, измерений и доведений до ума. Но если будет интересно, в будущем напишу статью и на эту тему.
Заключение
Все необходимые stl-файлы я выложил в общий доступ, может кому-то пригодится: https://www.thingiverse.com/thing:6547604
Список дополнительных компонентов:
Винты разной длины М3 и М4.
Болт мебельный DIN603 с гайкой 8х100 мм, 2 шт.
Подшипники: 608ZZ - 4 шт., 688ZZ - 4 шт.
Пружина растяжения (подобрать по длине и усилию)
Неодимовые магниты 5х2 мм (20 штук на держателе катушки, и 1-2 штуки на тормозных дисках, ставить по одному и проверять усилие вращения катушки)
Arduino UNO
LCD 1602 + i2c
Джойстик для Arduino
Драйвер шагового двигателя TB6560.
Шаговый двигатель биполярный 17HS4401 (Nema 17)
Фанера 30х30.
Мебельные войлочные диски диаметром 15мм, для натяжителя - 2 шт.
Скетч доступен на GitHub: https://github.com/AlexeyKutepov/winding-machine/blob/main/winder.ino
Показать полностью
11

Поиграем в бизнесменов?
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.
Измеритель индуктивности на LGT8F328
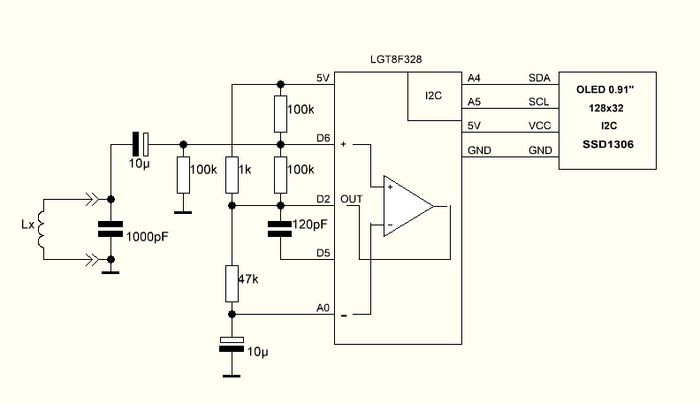
Пример создания измерителя индуктивности на LGT8F328 является продолжением статьи http://rcl-radio.ru/?p=131706 посвященной примерам работы компаратора в микроконтроллере LGT8F328.
Измерение индуктивности происходит достаточно просто, так как индуктивность и емкость представляют собой колебательный контур, то компаратор совместно с колебательным контуром будет генерировать частоту, а частотомер на Arduino произведет пересчет частоты в значения индуктивности по всем известной формуле:
L = 1/ (4π²F²C)
Схема измерителя индуктивности достаточно проста, она содержит несколько резисторов и конденсаторов, а так же плату микроконтроллера и OLED дисплей.
0,91″ I2C 128×32 OLED — это компактный дисплей, который использует технологию OLED (Organic Light Emitting Diode) для отображения изображений. Дисплей имеет интерфейс I2C, который обеспечивает простое подключение к микроконтроллерам и другим устройствам.

Основные характеристики дисплея:
— Разрешение 128×32 пикселей.
— Размер дисплея 0,91 дюйма (около 2,3 см).
— Яркость до 150 кд/м².
— Контрастность 2000:1.
— Угол обзора 160 градусов.
— Поддержка интерфейса I2C с адресом 0x3C.
Дисплей 0,91″ I2C 128×32 OLED обеспечивает четкое и яркое отображение информации, которое может быть использовано в широком спектре приложений. Он легко подключается к различным устройствам, таким как Arduino, Raspberry Pi и другим микроконтроллерам.
Дополнительно, OLED-дисплей имеет низкое энергопотребление, что позволяет использовать его в батарейных устройствах. Он также обладает быстрым временем отклика и высокой контрастностью, что делает его идеальным для использования в приложениях, где требуется быстрое и точное отображение информации.
В целом, дисплей 0,91″ I2C 128×32 OLED является отличным выбором для тех, кто ищет компактный и яркий OLED-дисплей с простым подключением по интерфейсу I2C.
В измерителе используется плата разработчика LGT8F328P-LQFP32 MiniEVB, как использовать плату в среде программирования Arduino IDE рассказано в — http://rcl-radio.ru/?p=129966
LGT8F328P-LQFP32 MiniEVB — это плата разработки, основанная на микроконтроллере LGT8F328P с 32 выводами в корпусе LQFP32. Это мощный микроконтроллер, который обеспечивает высокую производительность и широкие возможности для разработки.
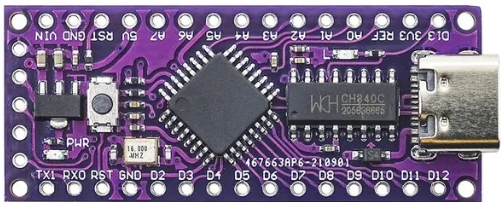
Основные характеристики платы LGT8F328P-LQFP32 MiniEVB:
— Микроконтроллер LGT8F328P с тактовой частотой до 32 МГц и 32 Кбайт памяти Flash.
— Поддержка интерфейсов SPI, I2C, UART, ADC и PWM.
— Встроенный USB-интерфейс для программирования и отладки.
— Низкое энергопотребление и поддержка режима сна.
— Поддержка работы от внешнего источника питания 5 В или от USB-порта.
LGT8F328P-LQFP32 MiniEVB — это отличная плата разработки для начинающих и опытных разработчиков, которые хотят создавать проекты на основе микроконтроллера LGT8F328P. Она обеспечивает легкую разработку и отладку приложений, поддерживает широкий спектр интерфейсов и имеет удобный USB-интерфейс для программирования и отладки.
Кроме того, плата LGT8F328P-LQFP32 MiniEVB имеет компактный размер и низкое энергопотребление, что позволяет использовать ее в различных приложениях, включая портативные устройства и системы автоматизации.
Измеритель индуктивности производит непрерывное измерение и выводит результат измерения на дисплей с интервалом 1 секунда. При сборке измерителя особое внимание следует уделить точности конденсатора колебательного контура, от него зависит точность измерения индуктивности. В схеме используется конденсатор номиналом 1000 пФ, но Вы можете использовать другой номиналом до 10 нФ. При этом необходимо указать его емкость в скетче.
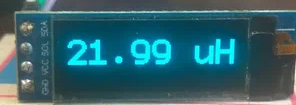
Измеритель индуктивности имеет два диапазона мкГн и мГн, которые переключаются автоматически.


Скетч - http://rcl-radio.ru/?p=131780
Показать полностью
6