

Брёвна <=> журналы
2001-й год: машинный перевод превращает журналы (logs) в брёвна
2021-й год: машинный перевод превращает брёвна (logs) в журналы

Игра - RAILROADS Online.
2001-й год: машинный перевод превращает журналы (logs) в брёвна
2021-й год: машинный перевод превращает брёвна (logs) в журналы
Игра - RAILROADS Online.

Нейросеть яндекса научилась переводить видео. Видео 20 минут было переведено и озвучено нейросетью за 30 секунд!!! Будущее всё ближе!

Хорошее предложение, пожалуй куплю.
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.
Когда мне кажется, что я видел все возможные итерации скалолазного робота, кто-то придумывает новый способ заставить роботов цепляться за вещи. Новейший метод был разработан в Лаборатории робототехники и дизайна Bioinspired при Калифорнийском университете в США , где им удалось заставить робота прилипать к гладким поверхностям с помощью вибрирующего двигателя, прикрепленного к гибкому диску. Как, черт возьми, это работает?
Согласно статье, только что опубликованной в Advanced Intelligent Systems , это происходит из-за «опосредованной жидкостью силы сцепления между колеблющейся пластиной и поверхностью», а не из-за черной магии. Очевидно.
Странно, правда? В статье исследователи объясняют, что здесь происходит: когда гибкий диск диаметром 14 см вибрирует с частотой 200 Гц, он создает тонкий слой воздуха низкого давления между собой и поверхностью, против которой он вибрирует. Хотя слой воздуха низкого давления имеет толщину менее 1 мм, диск может выдерживать силу натяжения 5 Н. Это можно рассматривать как эффект всасывания, за исключением того, что он не требует постоянного прилегания диска к поверхности, а это означает, что робот может перемещаться, не нарушая сцепления.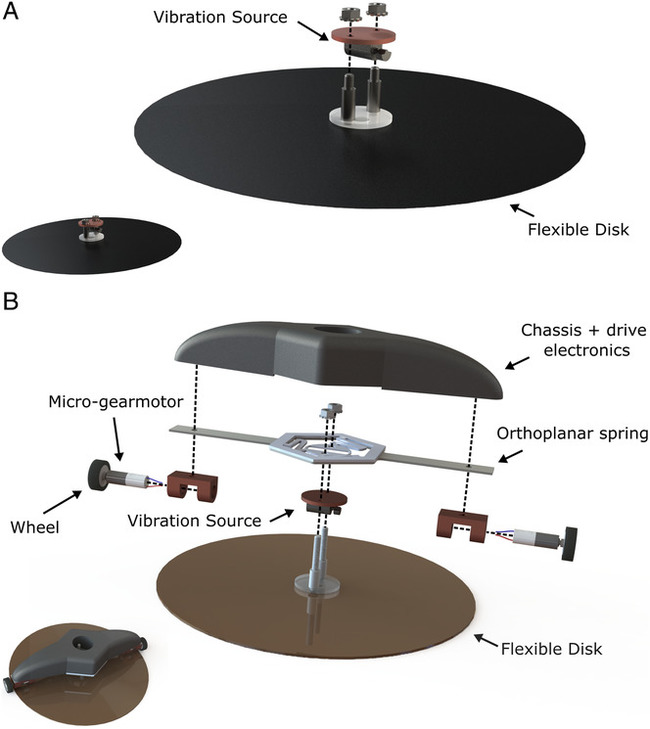
Большим преимуществом здесь является то, что это примерно так же просто и дешево, как и робот для лазания по гладкой поверхности, особенно в небольших (иш) масштабах. Однако есть и пара недостатков. Самая большая из них может заключаться в том, что 200 Гц - это частота, которая хорошо воспринимается человеческим слухом, что, вероятно, объясняет этот саундтрек в видео - робот, как выразились исследователи, «по своей природе довольно шумный». И, в отличие от некоторых других методов контролируемой адгезии, эта система должна быть постоянно включена, иначе она немедленно обречена на гибель.
Робот, на которого вы смотрите на видео (с 14-сантиметровым диском), кажется лучшим выбором, когда дело доходит до размера - уменьшение размера означает, что двигатель начинает принимать непропорционально большой вес, а увеличение размера, скорее всего, не приведет к масштабированию. что ж, общая масса системы увеличивается быстрее, чем величина адгезии, которую вы получаете. Исследователи предполагают, что «было бы выгодно комбинировать несколько геометрий дисков для достижения желаемой грузоподъемности и устойчивости к возмущениям», но это одна из многих вещей, которые исследователям необходимо выяснить, чтобы должным образом охарактеризовать этот новый метод адгезии.
Вибрационная адгезия для робототехники с газовой смазкой , написанная Уильямом П. Уэстон-Доуксом, Иманом Адибназари, И-Вен Ху, Майклом Эверманом, Ником Гравишем и Майклом Т. Толли, доступна https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202100... .