На какую орбиту и почему собираются вывести Lunar Orbital Platform-Gateway
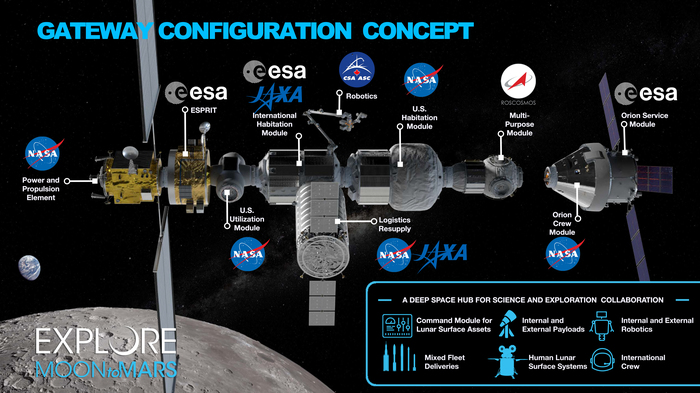
Как, наверное, многие уже знают, NASA в сотрудничестве с ESA, JAXA и Роскосмосом планирует в 2022-2028 годах построить окололунную орбитальную станцию Lunar Orbital Platform-Gateway (до переименования она называлась Deep Space Gateway). На днях NASA и ESA достигли соглашения о том, на какую орбиту эту самую станцию выводить. Орбита (Near Rectilinear Halo Orbit - дословно "близкая к прямолинейной гало-орбита", не знаю, как этот термин правильно переводится на русский язык, и есть ли вообще общепринятый перевод) сама по себе достаточно интересная, и, кажется, не всем хорошо понятно, что именно она собой представляет и почему была выбрана. Об этом я и постараюсь рассказать в этом посте.
Пост основан на материалах https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/201500... и https://www.youtube.com/watch?v=X5O77OV9_ek. Если вы любите читать-смотреть первоисточники на английском, вам туда.
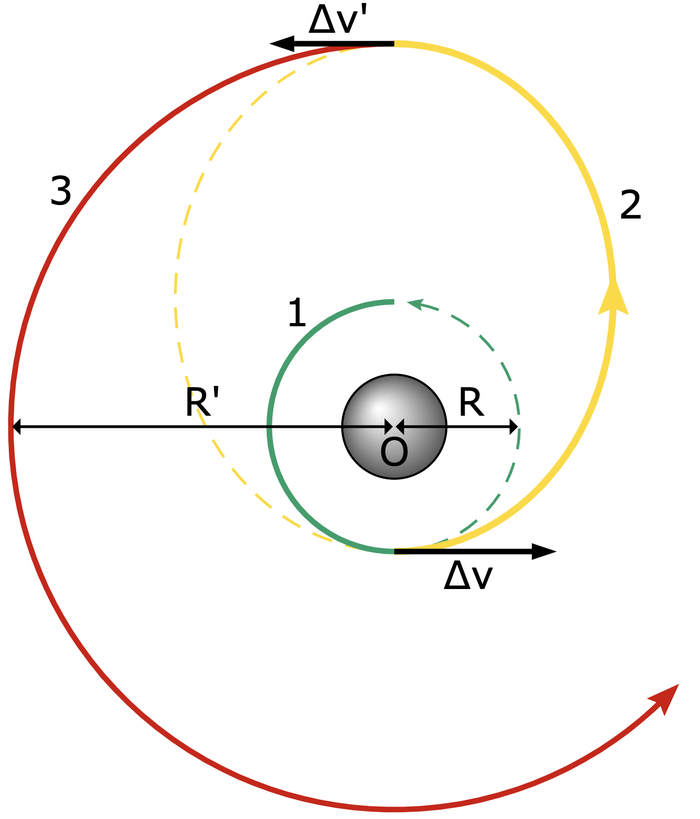
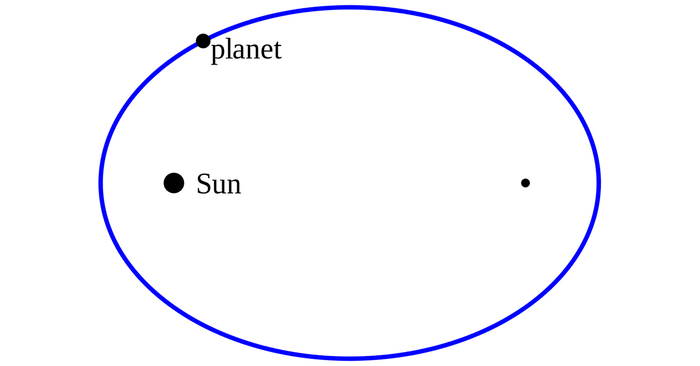
Итак. Как мы знаем с уроков физики, еще в начале XVII века Кеплер открыл законы движения небесных тел. Первый из них - "спутник обращается по эллипсу, в одном из фокусов которого находится центральное тело", примерно вот так:
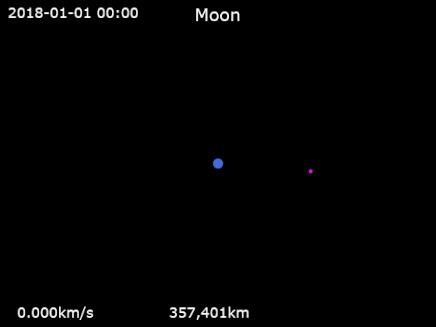
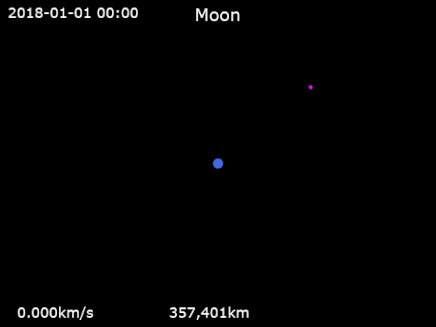
Ближе к концу того же века Ньютон открыл законы тяготения, которыми обосновываются законы Кеплера. Но благодаря тем же самым законам тяготения стало понятно, что законы Кеплера хорошо работают только в одном случае - если в нашем пространстве есть лишь одно точечное массивное тело, вокруг которого обращается пренебрежимо легкий спутник. Реальность не вполне похожа на это упрощение - Земля не единственное тело в Солнечной системе, а ее гравитационное поле не является сферически симметричным. Например, поэтому орбита Луны немного смещается туда-сюда относительно ее "среднего" эллипса:
Несмотря на то, что во многих случаях приближение Кеплера работает достаточно хорошо (большая часть планирования траекторий Аполлонов использовала именно его), есть случаи, когда это упрощение сильно искажает реальность. Одно из них (пожалуй, самое известное) - точки Лагранжа.
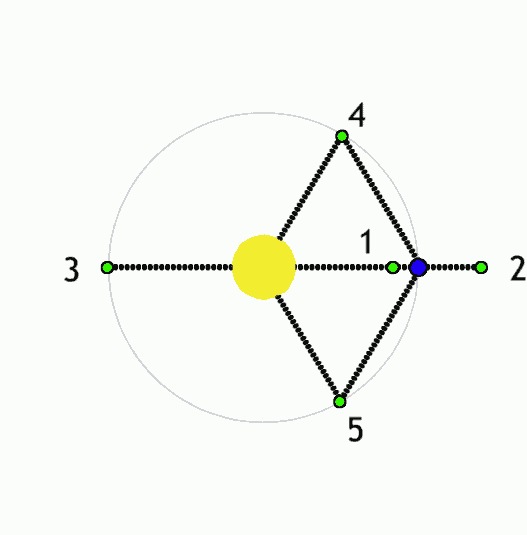
Точки Лагранжа системы двух тел - это такие орбиты, находясь на которых, легкий спутник остается неподвижным относительно этих двух тел. То есть, например, в точке L₁ системы Земля-Луна спутник будет обращаться вокруг Земли медленнее, чем должен бы, если бы Луны не было - потому, что сила его притяжения к Земле частично компенсируется силой притяжения к Луне, находящейся с другой стороны.
У точек Лагранжа есть много интересных свойств. Например, между ними можно путешествовать с очень малыми затратами топлива. Но для нас интереснее всего то, что вокруг них можно обращаться, а также то, что эти орбиты вокруг точек Лагранжа нестабильны.
Например, аппарат Genesis на картинке выше был выведен на гало-орбиту вокруг точки L₁ системы Земля-Солнце, совершил вокруг нее 5 оборотов, потом ненадолго слетал в L₂ и приземлился. Причем с гало-орбиты он сошел благодаря накоплению возмущений, без выполнения маневров. Обратите внимание, что система отсчета на картинке не инерциальная, а вращающаяся вокруг Солнца вместе с Землей, то есть, сама точка Лагранжа - это не точка, а орбита, вполне круглая и похожая на обычные.
Если нарисовать все траектории, по которым можно прилететь в точку Лагранжа или вылететь из нее, то получится примерно следующая картина:
Здесь зеленый овал - гало-орбита, зеленые траектории позволяют в нее добраться, а по красным можно из нее улететь.
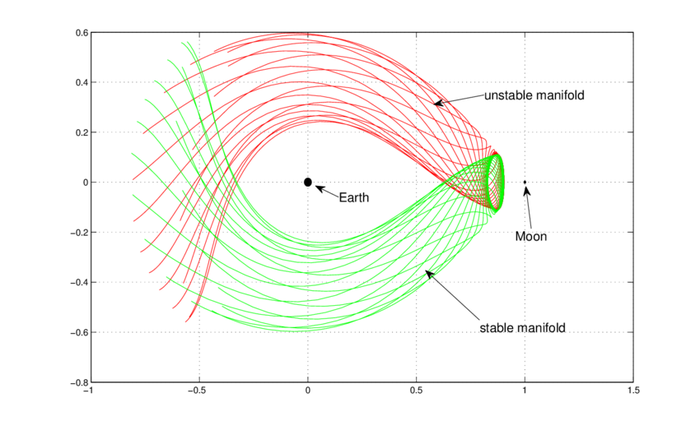
В районе Луны многообразие этих траекторий выглядит похожим образом:
Здесь средняя точка - Луна, левая точка - L₁, правая - L₂, красный овал - гало-орбита вокруг L₂. А вот белый эллипс - это как раз наша Near Rectilinear Halo Orbit, на которую и планируется вывести станцию.
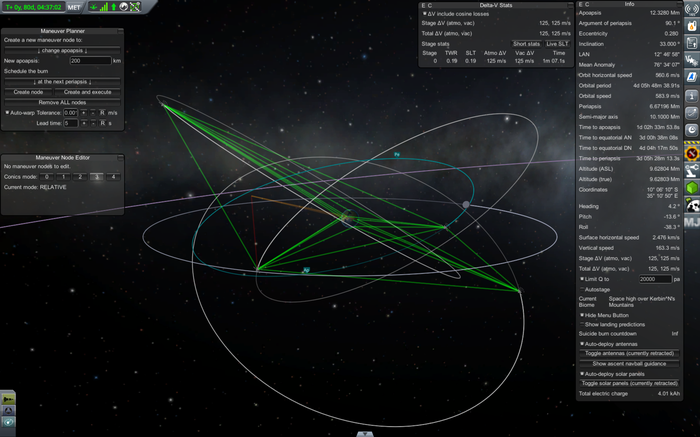
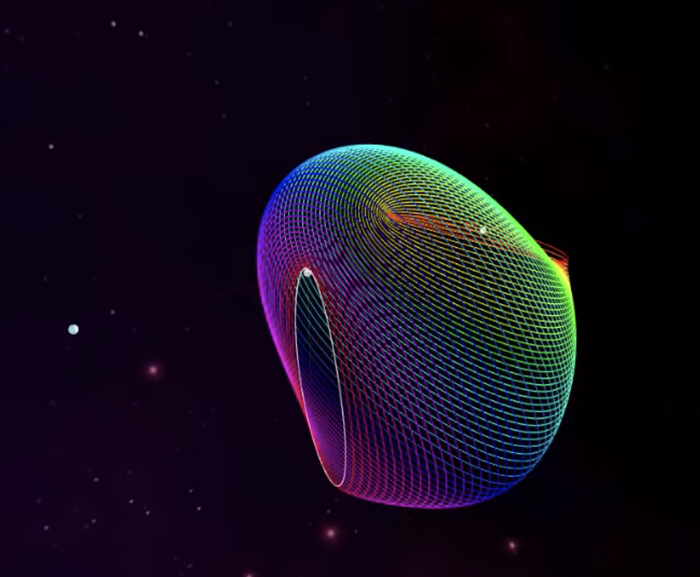
Несмотря на название, содержащее слово "прямолинейный" (rectilinear), космический аппарат на такой орбите не двигается по прямолинейной траектории:
На этом видео видна траектория движения станции на выбранной орбите.
Слева - траектория в инерциальной системе отсчета, связанной с Землей.
Справа снизу - траектория в инерциальной системе отсчета, связанной с Луной.
Справа сверху - траектория во вращающейся системе отсчета, в которой положения Луны и Земли зафиксированы.
Обратите внимание, что эта орбита не является кеплеровской - благодаря влиянию Земли долгота ее восходящего узла изменяется с периодом около 28 дней - то есть, орбита всегда остается перпендикулярной линии Земля-Луна.
NASA выбирала орбиту из следующего списка:
1. LLO. Низкая окололунная орбита. Высота около 100 км, период обращения около 2 часов.
2. PCO. Круговая орбита. Наклонение около 75°, высота 3-5 тысяч км, период обращения около 11 часов.
3. FLO. Замороженная орбита. Наклонение около 40°, высота 880-8'800 км, период обращения около 13 часов.
4. ELO. Эллиптическая орбита. Экваториальная, высота 100-10'000 км, период обращения около 14 часов.
5. NRO. Near Rectilinear orbit - собственно, о которой пост. Почти полярная, высота 2'000-75'000 км, период обращения 6-8 дней.
6. EMH. Гало-орбита вокруг L₂. Наклонение зависит от размера, расстояние от L₂ - 0-60'000 км, период - 8-14 дней.
7. DRO. Высокая ретроградная орбита. Экваториальная, высота около 70'000 км, период обращения 14 дней.
Почему же именно такая орбита? Этому есть ряд причин
1. Простота доступа с Земли.
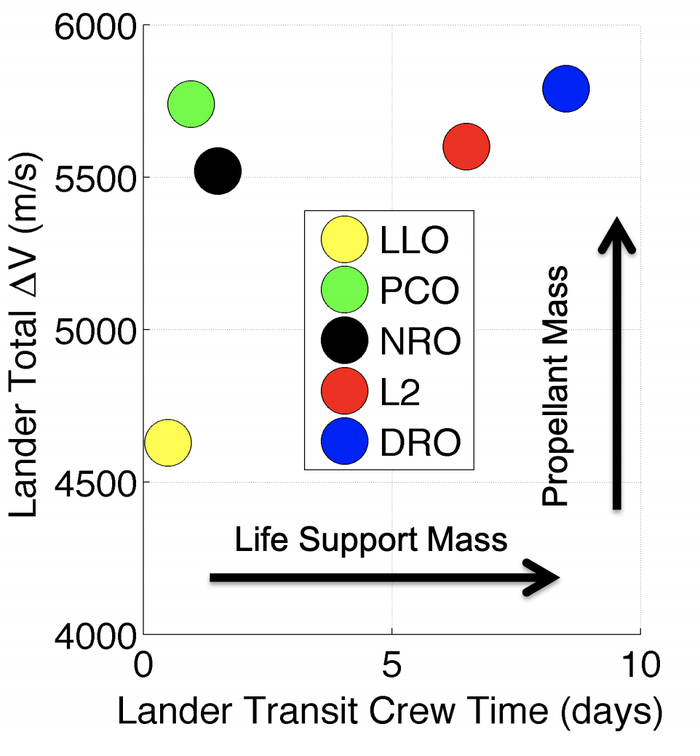
По текущим планам, на момент запуска станции у NASA будет ракета, способная вывести космический аппарат на траекторию полета к Луне, и космический корабль с запасом Δv около 1250 м/с. Если для выхода на орбиту станции этого будет недостаточно, придется срочно изобретать что-то еще, что едва ли возможно за оставшееся время. Кроме того, хочется, чтобы время перелета было, по возможности, небольшим. Эти соображения делают неприемлемой (не хватит скорости, чтобы туда вообще попасть) LLO и крайне нежелательными (едва-едва хватит) PCO, FLO и ELO. EMH и DRO оказываются несколько хуже, чем NRO - лететь заметно дольше.

Таблица из документа NASA. Для трех типов орбит указан требующийся запас изменения скорости и возможное время на станции для различных вариантов продолжительности миссии.
2. Простота доступа к поверхности Луны.
Чем ниже над Луной орбита, тем меньше нужно топлива, чтобы добраться до поверхности и вернуться. Однако на низкой орбите изменение наклонения крайне дорого, что означает, что может потребоваться ждать окна для вылета, что может занять до двух недель. И если орбита не полярная, может все же потребоваться изменение наклонения.
Картинка из документа NASA. По горизонтали - время перелета на поверхность Луны. По вертикали - требующийся запас изменения скорости. Значение, показанное для низкой окололунной орбиты, предполагает идеальный случай - отсутствие изменения наклонения. Если же мы предполагаем изменение наклонения на 30° (случай вполне средний), то эта точка окажется наверху, за границей графика.
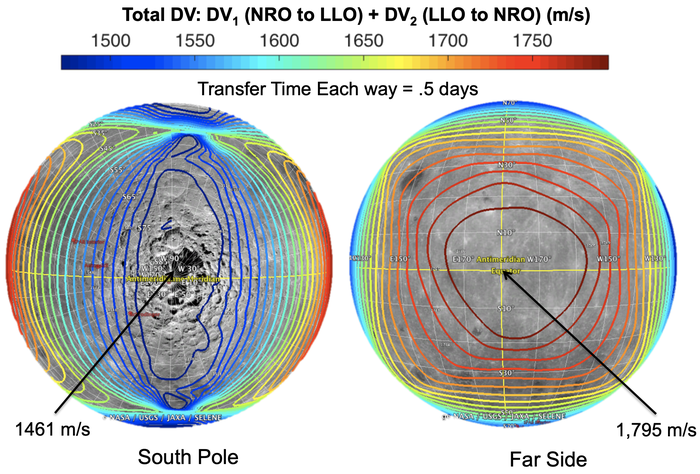
Картинка из документа NASA: стоимость доступа к различным областям Луны (и обратно) с NRO при ограничении на время перелета в одну сторону в 12 часов. Проще всего добраться до полюсов, сложнее всего - до экваториальных областей видимой и обратной сторон.
Также NRO позволяет при некоторых видах отказов двигателей все же добраться до станции, с увеличением времени полета - это очень важно при планировании сколько-нибудь регулярных полетов на Луну.
3. Затраты топлива на коррекцию орбиты.
Гравитационное поле Луны сильно неоднородно, что приводит к нестабильности некоторых орбит. Так, поддержание ELO потребует ежедневных коррекций на сумму свыше 300 м/с в год, а поддержание LLO - порядка 50 м/с. NRO и EMH же нестабильны по своей натуре, но содержание там аппарата сравнительно дешево - не более 10 м/с в год. Остальные рассматриваемые орбиты стабильны.
4. Связь с Землей.
Если станция находится на относительно низкой орбите Луны, то Луна часто закрывает собой Землю, приводя к потере связи. На высоких орбитах (DRO) такие потери связи происходят редко, особенно, если орбита наклонена по отношению к плоскости орбиты Луны. На орбитах NRO и EMH можно добиться полного отсутствия потерь связи.
5. Связь с Луной.
Связь с Луной полезна для проведения миссий на поверхности Луны. Низкие орбиты предполагают лишь изредка случающиеся окна связи, а относительно высокие могут обеспечить длительное наличие связи в определенном регионе Луны. В положительную сторону здесь выделяется гало-орбита вокруг L₂ - она позволяет достичь почти полного постоянного покрытия связью дальней стороны Луны, в то время как ближняя может использовать Землю как транслятор.
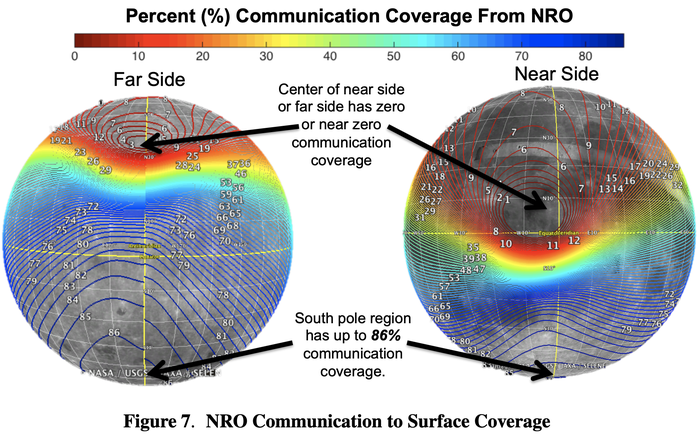
Картинка из документа NASA. Покрытие поверхности Луны связью со станцией на NRO.
6. Проблемы перегрева.
Полет на низкой орбите сильнее подвержен перегреву, поскольку станция освещается не только прямым солнечным светом, но и отраженным от поверхности Луны. Проблемы орбит средней высоты требуют дальнейшей проработки, а с высокими все ок норм.
Дальнейшие пункты - это мои соображения, в документах NASA их нет.
7. NRO обеспечивает простой доступ к точкам Лагранжа системы Земля-Луна. Настолько простой, что можно без проблем осуществлять ремонт, обслуживание или дозаправку аппаратов.
8. Из точек Лагранжа системы Земля-Луна можно довольно просто добраться в точки Лагранжа системы Земля-Солнце (затраты - десятки м/с дельты). То есть, тоже можно осуществлять поддержку космических аппаратов.
9. Из L₂ системы Земля-Луна можно с низкими затратами дельты отправляться в межпланетные путешествия (например, к Марсу). Это хорошо соответствует одной из основных целей станции - "служить испытательным полигоном для технологий межпланетных перелетов".