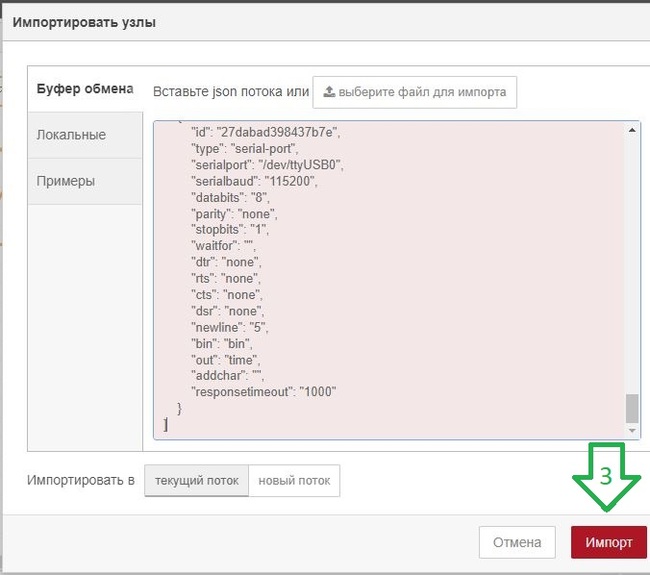
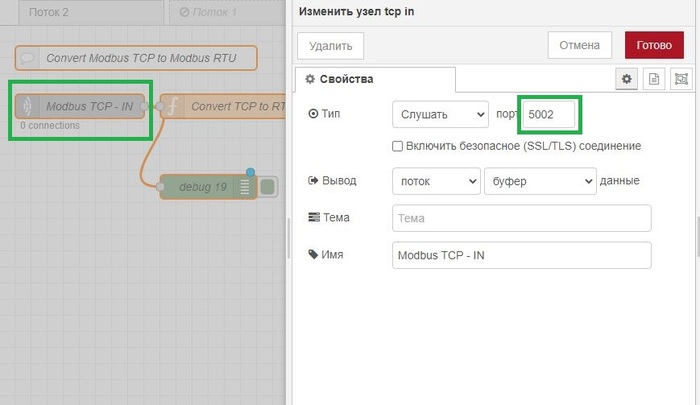
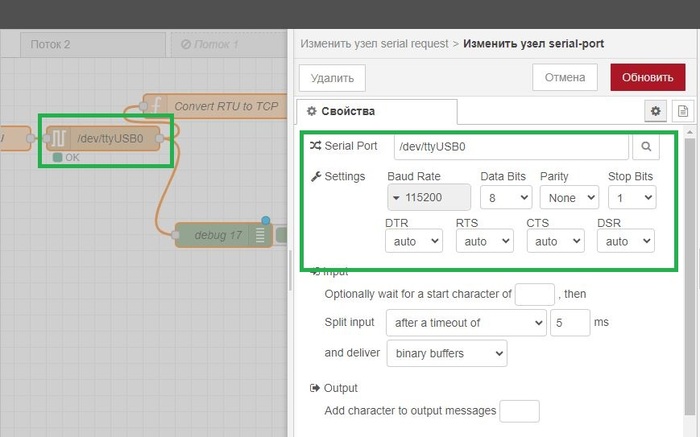
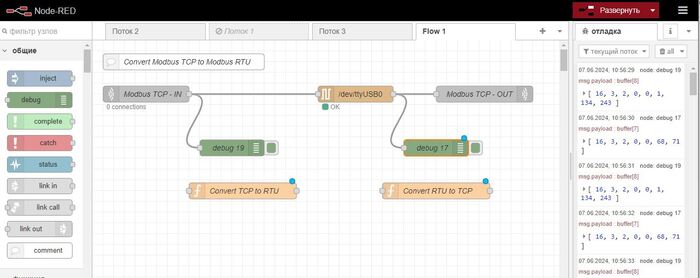
[ { "id": "22ff3060.54da6", "type": "function", "z": "de082ac2.4b8bf8", "name": "Convert TCP to RTU", "func": "var MBAPHeader = [5];\nvar crc = 0xFFFF;\n\nMBAPHeader[0]= msg.payload[0];\nMBAPHeader[1]= msg.payload[1];\nMBAPHeader[2]= msg.payload[2];\nMBAPHeader[3]= msg.payload[3];\nMBAPHeader[4]= msg.payload[4];\nflow.set('MBAP_HEADER', MBAPHeader);\n\nvar ReqLen = msg.payload[5];\nvar MBLen = (msg.payload.length)-ReqLen;\nvar MBReq = [MBLen];\n\nfor (let x=0; x < MBLen;x++){\n MBReq[x] = msg.payload[x+ReqLen];\n}\n\nfor (var req = 0; req < ReqLen; req++) {\n crc ^= MBReq[req]; // XOR byte into least sig. byte of crc\n \n for (var i = 8; i !== 0; i--) { // Loop over each bit\n if ((crc & 0x0001) !== 0) { // If the LSB is set\n crc >>= 1; // Shift right and XOR 0xA001\n crc ^= 0xA001;\n } else { // Else LSB is not set\n crc >>= 1; // Just shift right\n }\n }\n}\n\nvar MyCRC = crc.toString(16);\nMBReq[MBLen+1] = parseInt(MyCRC.substring(0,2),16);\nMBReq[MBLen] = parseInt(MyCRC.substring(2,4),16);\n\nvar buf = new Buffer(MBReq);\nmsg.payload = buf;\nreturn msg;", "outputs": 1, "noerr": 0, "initialize": "", "finalize": "", "libs": [], "x": 300, "y": 100, "wires": [ [ "7e62bbbc.bd8ea4" ] ], "outputLabels": [ "XO" ] }, { "id": "7e62bbbc.bd8ea4", "type": "serial request", "z": "de082ac2.4b8bf8", "name": "", "serial": "27dabad398437b7e", "x": 490, "y": 100, "wires": [ [ "db79ee80.1d792", "9e53f02d0a4e04fb" ] ] }, { "id": "db79ee80.1d792", "type": "function", "z": "de082ac2.4b8bf8", "name": "Convert RTU to TCP", "func": "if (msg.payload.length > 0) {\n var resLen = msg.payload.length - 2;\n var respond = [];\n respond[0] = flow.get('MBAP_HEADER')[0];\n respond[1] = flow.get('MBAP_HEADER')[1];\n respond[2] = flow.get('MBAP_HEADER')[2];\n respond[3] = flow.get('MBAP_HEADER')[3];\n respond[4] = flow.get('MBAP_HEADER')[4];\n respond[5] = resLen;\n\n for (let req = 6; req < resLen+6; req++) {\n respond[req]= msg.payload[req-6];\n }\n msg.payload = new Buffer(respond);\n return msg;\n} else {\n return null;\n}\n", "outputs": 1, "noerr": 0, "initialize": "", "finalize": "", "libs": [], "x": 640, "y": 60, "wires": [ [ "2622a1e893f52bed", "140a62f5366490d9" ] ] }, { "id": "55423964225fa869", "type": "comment", "z": "de082ac2.4b8bf8", "name": "Convert Modbus TCP to Modbus RTU", "info": "", "x": 170, "y": 40, "wires": [] }, { "id": "cbd6e86861af643d", "type": "tcp in", "z": "de082ac2.4b8bf8", "name": "Modbus TCP - IN", "server": "server", "host": "", "port": "5002", "datamode": "stream", "datatype": "buffer", "newline": "", "topic": "", "trim": false, "base64": false, "tls": "", "x": 100, "y": 100, "wires": [ [ "22ff3060.54da6", "48471bdeae3a1d30" ] ] }, { "id": "2622a1e893f52bed", "type": "tcp out", "z": "de082ac2.4b8bf8", "name": "Modbus TCP - OUT", "host": "127.0.0.1", "port": "502", "beserver": "reply", "base64": false, "end": false, "x": 850, "y": 100, "wires": [] }, { "id": "9e53f02d0a4e04fb", "type": "debug", "z": "de082ac2.4b8bf8", "name": "debug 17", "active": true, "tosidebar": true, "console": false, "tostatus": false, "complete": "false", "statusVal": "", "statusType": "auto", "x": 640, "y": 220, "wires": [] }, { "id": "140a62f5366490d9", "type": "debug", "z": "de082ac2.4b8bf8", "name": "debug 18", "active": true, "tosidebar": true, "console": false, "tostatus": false, "complete": "false", "statusVal": "", "statusType": "auto", "x": 820, "y": 200, "wires": [] }, { "id": "48471bdeae3a1d30", "type": "debug", "z": "de082ac2.4b8bf8", "name": "debug 19", "active": true, "tosidebar": true, "console": false, "tostatus": false, "complete": "false", "statusVal": "", "statusType": "auto", "x": 260, "y": 200, "wires": [] }, { "id": "27dabad398437b7e", "type": "serial-port", "serialport": "/dev/ttyUSB0", "serialbaud": "115200", "databits": "8", "parity": "none", "stopbits": "1", "waitfor": "", "dtr": "none", "rts": "none", "cts": "none", "dsr": "none", "newline": "5", "bin": "bin", "out": "time", "addchar": "", "responsetimeout": "1000" } ]