Предыстория, или как Том Хэнкс виноват в том, что я теперь не сплю
Посмотрел на днях фильм «Финч» (2021) — тот, где Том Хэнкс в постапокалипсисе собирает робота, чтобы тот позаботился о его собаке. Робот там учится ходить, водить машину, понимать мир. Снято невероятно душевно и при этом грустно до комка в горле.
Проснулся на следующий день и понял: хочу такого же. Ну, не в смысле постапокалипсис — а именно робота-компаньона, который рядом, который учится, с которым можно разговаривать.
Понятное дело, ходить мой робот не будет — это совсем другой уровень сложности и бюджета. Но вот сделать настольного помощника, с которым можно общаться голосом, который видит меня через камеру и реально помогает в работе — это мне вполне по силам.
Кто я такой и почему думаю, что потяну
Я работаю сисадмином и разработчиком. Разворачиваю сервера, пишу обработки, делаю телеграм-ботов, собираю сайты. У меня дома свой сервер (даже несколько), и целый зоопарк из виртуальных машин и контейнеров. Так что с железом и софтом я на «ты».
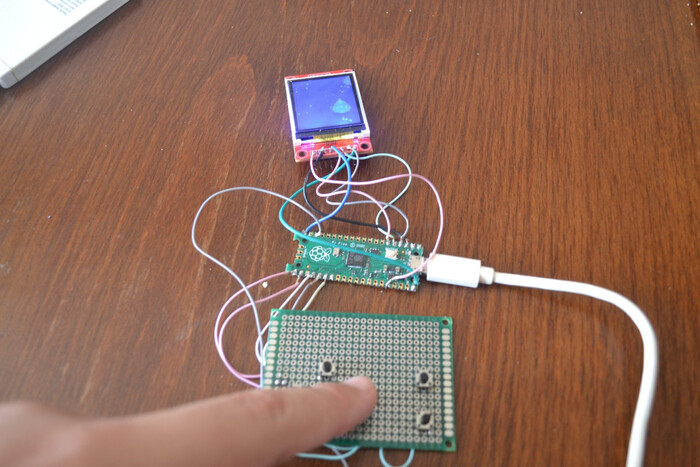
Знакомьтесь — Flappy
Пока выглядит не очень, но через 2 недели приедет корпус и монитор.
Назвал его Flappy — от английского «flappy», болтливый. Потому что главное, что он будет делать — это разговаривать со мной и помогать голосом.
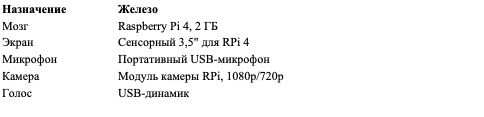
Что он из себя представляет на сегодня — это коробочка на базе Raspberry Pi, которая будет стоять у меня на рабочем столе. Вот что я для него заказал:
Список компонентов не окончательный
Всё уже заказано на Алиэкспрессе, ждём.
Что он будет уметь
Вот тут самое интересное. Я хочу, чтобы Flappy был не просто говорящей колонкой, а реальным помощником.
Голосовое общение. Микрофон + динамик — чтобы я мог просто сказать: «Flappy, поставь задачу на завтра: в 9 утра сформировать ОПД и отправить клиенту» — и он поставит. У меня уже есть свой телеграм-бот, куда я наговариваю задачи — осталось прикрутить это к Flappy.
Управление серверами. Мечта — сказать: «Flappy, подключись к Proxmox, создай виртуальную машину, разверни там SSH и пришли мне доступы». Креды у него будут в памяти, API у Proxmox есть — технически это реально.
Камера и узнавание. Хочу, чтобы когда я захожу в комнату, он видел меня и говорил что-нибудь вроде: «Привет, Иван, давно не виделись!» Или мог распознать, что я ему показываю.
Экранчик с эмоциями. На 3,5-дюймовом дисплее будут отображаться эмоции, статусы, может быть какие-то подсказки. Чтобы он был не просто коробкой, а чем-то живым.
Что дальше
Пока жду посылки с Али. Когда всё приедет — начну собирать и буду выкладывать процесс. Если тема зайдёт, сделаю серию постов: от сборки железа до первого «Привет, Иван».
Как вам идея? Стоит делать серию постов, или я один тут сумасшедший, который вдохновился фильмом и решил собрать себе робота-помощника на малинке?
А можно рассмотреть старые компы типа XT? Эмулятор для них есть в проекте "мурмулятор". Там же схемы эмуляции различных приставок, компьютеров типа "Радио-86РК" и "ZX-Spectrum".
Надеюсь скоро можно будет эмулировать i286 и i386 - и, возможно, даже получится запустить OS/2 Warp 4.0 Merlin или что-то подобное для офисной работы...
Я маргинал, который знает исключительно вершки-корешки и не умеет ни код нормальный писать, ни что то доводить до конца. Я не закончил три пту в своем городе из за того, что просто отбитый маргинал. Поэтому мне не светит ни госка, ни частная контора, ни даже работа на галере - у меня нет скиллов, а умело продавать себя я не умею и у меня не хватает хватки.
Так что фигня это все, мой максимум - второсортные развлекательные статейки, чисто как бульварное чтиво, только про IT. Почти как нейромусор.
Осторожно: Статья написана максимально простым языком. Так что если вы гик, но не умеете программировать - вам всё равно будет интересно!
Недавно я наткнулся на DIY-игровую консоль за 1.500 рублей - Waveshare GamePi13. Когда гаджет приехал ко мне, я запустил примеры игр от производителя... и оторопел от 5 FPS в Pong - это ж как плохо нужно код писать!
Не желая мириться с этим, я открыл схему устройства, даташит на RP2040 и принялся писать свой собственный BIOS. Если вам интересно узнать, как работают DIY-консоли «изнутри», можно ли запускать внешние программы на микроконтроллерах из RAM, как реализованы различные подсистемы BIOS, а в конце даже написать «Змейку» - добро пожаловать под кат!
❯ Предисловие
Иногда китайские производители выпускают на рынок дешевые гаджеты с ориентиром исключительно на гиков. Чего-уж говорить, с какой-нибудь R36s чего только не сделали: и кастомные прошивки, и порты игр с ПК, и даже достаточно сложные аппаратные модификации. Однако в тусовке DIY'щиков обычно всё куда хардкорнее...
«Андерграундные» консоли выходят чуть ли не каждый день, но лишь единицы из них становятся хоть сколь либо популярными и попадают на массовый конвейер. От «больших» консолей их отличает простая схемотехника, использование распространенных и дешевых микроконтроллеров общего назначения и полная свобода творчества — что хочешь, то и твори! По характеристикам они чаще всего близки к оригинальному GameBoy или GameBoy Advance, а покупают их инженеры, демосценеры и ретро-энтузиасты, которые не только играют во что-то готовое, но и пишут небольшие игрушки сами!
Самые известные консоли такого формата — это нашумевший Playdate и чуть менее известный Arduboy. Обе консоли сильно ограничены в характеристиках и это подстегивает интерес гиков к постоянной оптимизации кода и попыткам впихнуть «невпихуемое». Выделился даже российский «Микрон», представив свою DIY-консоль «для хардкорных ардуинщиков» — некий MikBoy на базе своего же МИК32 «Амур»!
Я уверен что Микроновцы будут читать эту статью... Если вдруг всё получится и MikBoy пойдёт в серию — то напишите мне пожалуйста сообщение :)
Подобным «ардуинщиком» являюсь и я. Ещё со школьных лет меня нереально тянет к микроконтроллерам и Embedded-электронике в целом. О консоли собственной разработки я мечтаю с 14 лет, при этом мне не просто хочется собрать прототип и «забить», но и запустить мелкосерийное ручное производство и продавать устройства подписчикам! К своим 24-годам я сделал два прототипа и развел три платы, но все эти проекты так или иначе откладывались в долгий ящик...
Один из ранних-ранних прототипов, предназначенный для обкатки драйвера дисплея.
И вот, 25 сентября мне стукнуло 24 годика. Уже взрослый мальчик получил в качестве подарка донат от постоянного читателя и пошёл изучать маркетплейсы в поисках интересного железа. По ключевым словам «tft lcd diy» был найден «ESP32 Bitcoin Miner V2» (выгодный девкит с 2.8" и ESP32-S2), девкит ESP32 с 4.3" дисплеем и емкостным тачскрином, а также некий Waveshare GamePi13, о котором мы сегодня с вами и поговорим!
Отдельное спасибо хотелось бы сказать тем самым подписчикам. Без вашей поддержки этой статьи бы не было!
Waveshare — знаменитый в кругах энтузиастов SBC производитель. В основном компания занимается дисплеями, модулями расширения и одноплатными компьютерами.
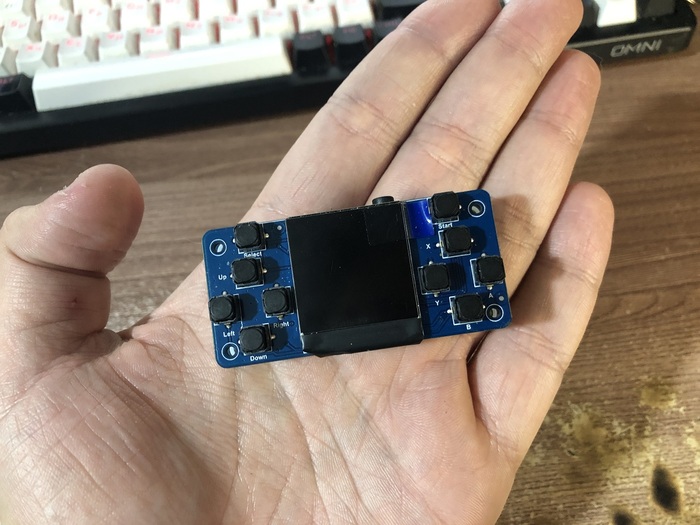
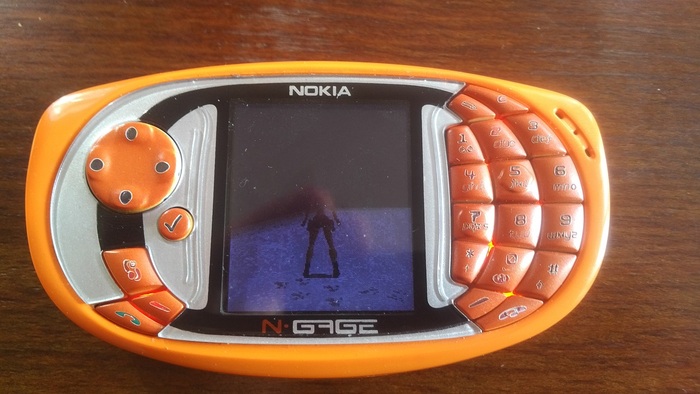
В тот же день я заказал устройство, и уже через 3 недели трепетного ожидания, GamePi13 оказался у меня на столе. На первый взгляд консоль показалась очень маленькой: её 1.3" дисплей был даже меньше, чем у Nokia 6230i, а кнопки оказались расположены непривычно близко друг к другу. Ко всему прочему, у консоли не было предусмотрено вообще никакого корпуса: ни «болванки» от производителя, ни STL-файлов для печати. Что-ж, это только придаёт брутальности нашему устройству!
Оба устройства помещаются в одну ладошку... А ведь когда-то 6230i казался реально большим!
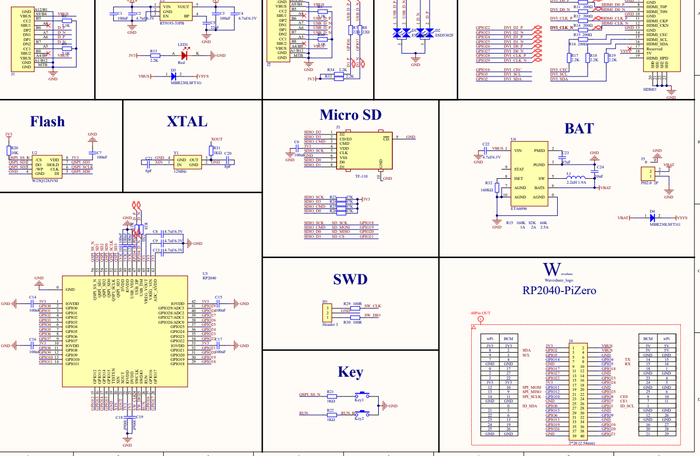
Как вы уже могли заметить, консоль состоит из двух независимых модулей: платы разработки Waveshare RP2040-PiZero и «бутербродного» геймпада с дисплеем, который подключается к гребёнке основной платы. В этом и кроется главный секрет устройства: геймпад изначально рассчитан именно для «одноплатников» Raspberry Pi, но поскольку Waveshare также выпускает плату RP2040 с Pi-совместимой гребёнкой, они решили заодно адаптировать его и для PiZero.
❯ Что внутри?
Хоть PiZero и похожа на референсную плату в лице Raspberry Pi Pico, у неё есть несколько серьёзных отличий:
Во первых, на плате установлена SPI-флэшка объёмом аж в 16МБ. Это максимальный объём, который поддерживает XIP-контроллер в RP2040. В RPi Pico же используется флэш-память объёмом всего в 2МБ.
Далее внимание привлекает использование менее эффективного ULDO RT9193 вместо полноценного DC-DC преобразователя в оригинальном Pico. Сам микроконтроллер сможет работать при разрядке аккумулятора ниже 3.6В, а вот периферия — под вопросом. Иными словами, мы не сможем использовать «все соки» из аккумулятора и нам придётся реализовывать отсечку по напряжению.
На плате распаяна микросхема-чарджер литий-ионных аккумуляторов ETA6096 с током зарядки аж в 1А. Если захотите использовать аккумулятор меньшей емкости — стоит подобрать резистор ISET большего номинала, иначе есть риск перегрева.
Из разъёмов распаян HDMI (да, я тоже в шоке), слот для MicroSD (под него отдали весь SPI0) и два Type-C: один для аппаратного USB-контроллера в RP2040, второй для USB через PIO. В общем, пытались угодить всем.
Плата с геймпадом не менее интересная. С фронтальной стороны у нас расположилось 10 кнопок и 1.3" IPS-дисплей с разрешением 240x240, использующий контроллер ST7789. Вообще, для такой диагонали разрешение дисплея крайне избыточно: оно не только съедает драгоценные килобайты оперативной памяти для фреймбуфера, но и значительно грузит DMA-контроллер и всю шину SPI. Я бы на месте инженеров установил бы сюда «золотой стандарт» — недорогой 1.8" 128x160. Все кнопки подключены к отдельным пинам без сдвигового регистра и занимают значительную часть доступных GPIO.
Я бы сделал лучше!
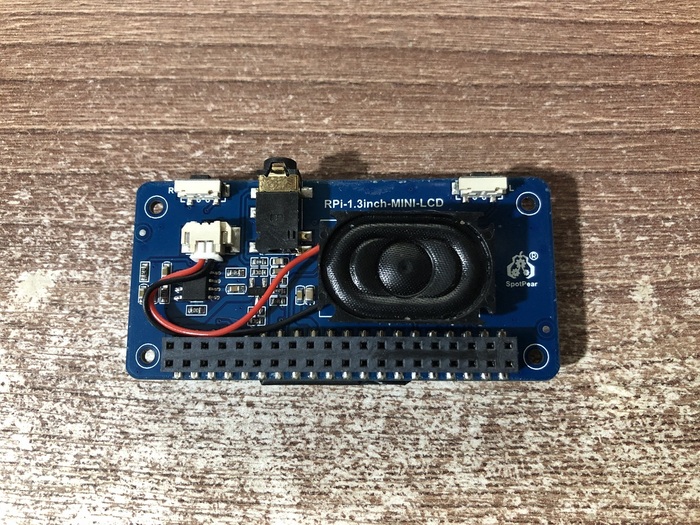
С обратной стороны расположился небольшой динамик, усилитель, построенный на базе NS8002, 3.5мм джек для подключения наушников, а также токоограничивающий резистор подсветки и обвязка для дисплея. Подсветка подключена напрямую к VSYS и рассчитана на питание от 3.3В, так что никакой регулировки яркости и продвинутых режимов сна!
Производитель платы — компания SpotPear.
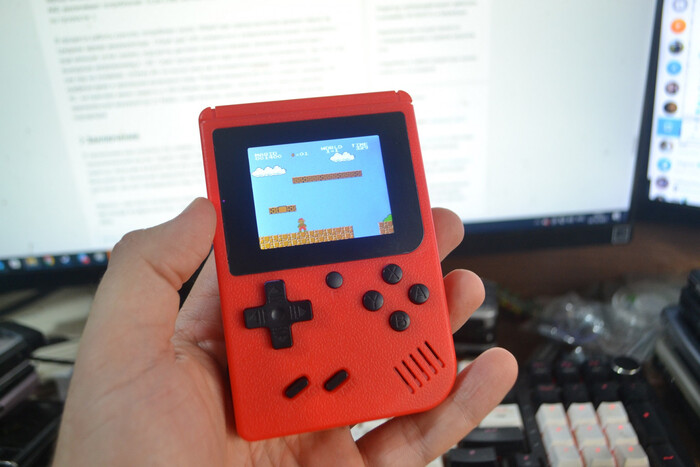
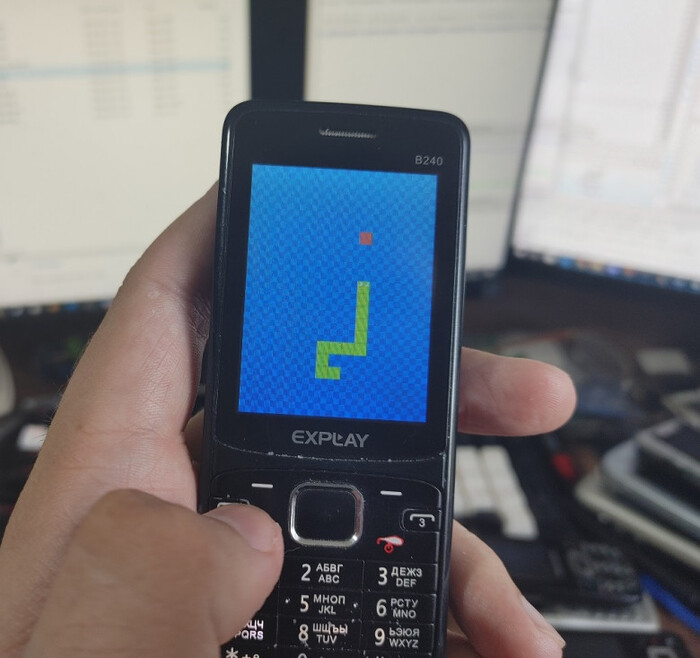
Ну что-ж, собираем наш бутерброд обратно, подключаем Type-C и смотрим на одну из представленных демо-игр — Тетрис!
Нет, это не пережатая гифка, игра действительно идёт буквально в 1 FPS и с мерцанием — и это на микроконтроллере с ядром Cortex-M0+ на частоте аж в 150МГц! Я напомню, что N-Gage с процессором TI OMAP на более старом ядре ARM926EJ-S с частотой 104МГц умудрялся тянуть первый Tomb Raider с полностью программным рендерингом в 25 FPS!!!
Далее я решил открыть официальный вики Waveshare и изучить информацию о консоли, где нашел несколько примеров игр для неё, одной из которых был Pong. Какое же было моё разочарование, когда я узнал, что обе игры написаны полностью на Python: игровая логика, маршалинг данных, работа с «железом» — всё это было на интерпретируемом языке и более того, написано плохо и крайне неэффективно!
Ни о каком подобии SDK или библиотеки для абстрагирования работы с железом даже речи не шло, практически всё, кроме номеров пинов, было захардкожено прямо в коде игры. О хорошей архитектуре тоже речи не идёт: один класс на всю логику с глобальными переменными... В общем, сэмплы писал либо новичок, либо прожженный эмбеддер :)
Драйвер дисплея даже не пытается использовать DMA, из-за чего даже Понг, состоящий из трёх прямоугольников умудряется тормозить.
def blit_buffer(self, buffer, x, y, width, height): """ Copy buffer to display at the given location.
Args: buffer (bytes): Data to copy to display x (int): Top left corner x coordinate Y (int): Top left corner y coordinate width (int): Width height (int): Height """ self.set_window(x, y, x + width - 1, y + height - 1) self.write(None, buffer)
Звуковая подсистема, состоящая из одноканальной тональной пищалки на аппаратном ШИМ-контроллере, тоже была со своими «приколами». Например «тишина» — это 0, то есть магнит всегда прижат к нижней части, хотя должно быть PWM_MAX / 2.
Под впечатлением от такого кода, я решил попробовать написать SDK для этой консоли сам. Однако моё видение идеальной DIY-консоли сильно отличалось от того-же Arduboy или Playdate!
❯ Архитектура
При проработке архитектуры будущего «BIOS», я сразу же поставил для себя несколько чётких задач:
Во первых, BIOS должен быть достаточно абстрактным для того, чтобы скрывать от игры детали реализации конкретного «железа». Иными словами, игра оперирует не DMA-контроллерами, FPU-сопроцессором и SPI, а набором простых и понятных подсистем: графика, ввод, звук, хранилище. Кроме того, это позволяет легко портировать игры для такого BIOS'а на другие платформы: можно без проблем реализовать симулятор (не эмулятор!) консоли на ПК или портировать её на ESP32 с минимальными изменениями.
Во вторых, мы ставим производительность в основной приоритет при разработке устройства. В конце-концов это же позорище, что простейшая игра тормозит и мерцает на мощном микроконтроллере, но при этом тетрисы с трёхмерной графикой вполне шустро работали на телефонах Sony Ericsson 2005 года. Именно поэтому для написания игр используются не скриптовые языки по типу Lua или JS, а самый обычный «C с классами».
В третьих, сам BIOS должен быть легко портируем между разными платами (у SpotPear есть вторая похожая плата — уже с 1.5" и стиком) и даже аппаратными платформами. Этот проект может стать основной прошивкой для консоли уже моей разработки и иметь вот такую «кроссплатформу» было бы отнюдь не лишним!
Руководствуясь критериями выше, я решил писать BIOS на C++ (на деле C с классами) с активным использованием интерфейсов и VMT. Это позволяет не только удобно структурировать модули и повышает читаемость кода игры, но и избавляет от необходимости вручную составлять таблицу системных вызовов к API. Тем не менее, в таком подходе есть один серьёзный нюанс: когда у подсистем появляются новые методы или добавляются перегрузки к прошлым, их необходимо по порядку добавлять в конец интерфейса, иначе VMT ломается.
vtable for CTest: .word 0 .word typeinfo for CTest .word CTest::Test() .word CTest::Abc() vtable for ITest: .word 0 .word typeinfo for ITest .word __cxa_pure_virtual .word __cxa_pure_virtual
В своё время Microsoft решила эту проблему в COM с помощью QueryInterface и миллиона вариаций этих самых интерфейсов: IDirectSound8, IDirectDraw7 и т.д, но мы можем не изобретать велосипед, а просто предоставлять «старым» играм такие же «старые» версии VMT.
Основным объектом в BIOS'е является CSystem, который содержит в себе ссылки на другие подсистемы консоли, а также на информацию о текущей аппаратной платформе:
/// @brief Primary system service, supplied to both games and system modules. class ISystem { public: virtual CSystemInfo* GetSystemInfo() = 0;
Несмотря на кажущуюся «динамическую» натуру системы, никаких IID я переизобретать не стал. BIOS должен реализовывать ровно тот минимальный функционал системы, который нужен. Экземпляр CSystem создаётся так называемым «портом» на конкретную плату, который должен заполнить структуру с указателями на реализации подсистем — прямо как machine-файлы в Linux! И RAII не нарушили, и полный контроль без костылей сохранили — ляпота!
void InitializePlatform() { CommManager = new CCommunicationManager(); CDebugService* dbgSvc = new CDebugService();
/* Print some userful debug information */ CJEDECFlashID* flashId = FlashManager.GetFlashID();
while (true) { /* Tick all platform-depend services here */ CommManager->Tick(); PowerStateManager.Tick(); InputService->Tick();
System->Tick(); } }
В целом, базовая архитектура примитивная и понятная. Перейдем же к деталям реализации конкретных модулей.
❯ Графика
Первая подсистема, которую я реализовал — была графической. Концептуально она разделена на два отдельных модуля: драйвер дисплея, который позволяет получить его параметры и в будущем управлять его состоянием, а также модуль для рисования на поверхностях. Прямо как в DirectDraw:
class IDrawingSurface : public ISystemService { public: virtualvoid Clear(CColor color) = 0; virtualvoid DrawBitmap(CBitmap* bitmap, int x, int y) = 0; virtualvoid DrawBitmapEx(CBitmap* bitmap, int x, int y, CSpriteInfo* spriteInfo) = 0; virtualvoid DrawRect(CColor color, int x, int y, int width, int height) = 0; virtualvoid FillRect(CColor color, int x, int y, int width, int height) = 0; virtualvoid DrawLine(CColor color, int x1, int y1, int x2, int y2) = 0; virtualvoid DrawString(CColor color, int x, int y, CAnsiChar* str) = 0; };
class IGraphicsService : public ISystemService { public: virtualvoid SetPowerState(bool isPowerEnabled) = 0; virtualvoid SetBacklightState(bool isBacklightEnabled) = 0; /* Maybe some controller-related functions in future? Like BIAS and HW rotation? */
Сам драйвер дисплея классический: в его задачи входит инициализация контроллера, выделение памяти под фреймбуфер и регулярное обновление изображения на матрице. Поскольку в таких устройствах используются стандартные MIPI DBI экраны с набором команд DCS, часть кода инициализации и работы с дисплеем стало возможным унифицировать:
/* Perform hardware reset */ gpio_put(PIN_LCD_RST, 0); sleep_ms(DISPLAY_INIT_SLEEP_TIME); gpio_put(PIN_LCD_RST, 1); sleep_ms(DISPLAY_INIT_SLEEP_TIME); /* Wait for display controller to complete initialization */
Reset(); /* Perform software reset to maintain default register state */ SendCommand(cmdSLPOUT, 0, 0); /* Disable sleep mode */ SendCommand(cmdCOLMOD, 0x05); /* Set color format and decoding*/ SendCommand(cmdINVON, 0, 0); /* Disable inversion */ SendCommand(cmdNORON, 0, 0); /* Enable normal mode */ SendCommand(cmdMADCTL, cmdMADCTL_RGB); /* Set pixel size */
uint8_t windowSize[] = { 0 >> 8, 0, DISPLAY_WIDTH >> 8, DISPLAY_WIDTH }; /* Set display window (note this is not safe for displays with sides not equal in size) */ SendCommand(cmdCASET, windowSize, 4); SendCommand(cmdRASET, windowSize, 4);
SetPowerState(true); /* Enable display */
Вероятно читатель может спросить: «зачем выделять целых 115КБ под фреймбуфер, если можно использовать команды CASET/RASET и рисовать отдельные спрайты прямо в память дисплея?». Дело в том, что в таком случае скорость отрисовки будет падать обратно пропорционально размеру и числу рисуемых изображений. Если мы попытаемся нарисовать параллакс-фон, состоящий из трёх картинок с размерами 240x240, то нашим узким местом станет не только цена обращения к XIP-кэшу, но и производительность SPI-контроллера (который напрямую тактируется от системного PLL) и мы получим те самые 1-2 FPS. Кроме того мы потеряем возможность использования DMA и нам придётся ждать каждой транзакции на экран: это проблема многих «самодельных» консолей, которую, впрочем, можно решить обратившись к опыту предков — а именно PPU.
В своём проекте я решил активно задействовать DMA-контроллер для отправки фреймбуфера на дисплей. Концепция простая: мы указываем ему переслать фреймбуфер, начинаем подготавливать следующий кадр и если транзакция ещё не завершена - то дожидаемся её окончания, дабы картинка оставалась целостной. Однако если обновление логики следующего кадра завершается быстрее, чем DMA-контроллер успевает отправить сканлайны - мы можем получить эффект тиринга.
/* Setup DMA for SPI */ dmaChannel = dma_claim_unused_channel(true);
Далее переходим к фактической отрисовке изображений. На данный момент поддерживается только один формат пикселей — RGB565, поскольку нет особого смысла использовать 8-битную палитру для изображений 32x32 (но есть смысл использовать 4х-битную, как на NES). Процесс рисования называется блиттингом и поскольку реализация полноценного альфа-блендинга слишком дорогая для реалтайм графики на микроконтроллерах, для описания прозрачности используется техника колоркеев.
ColorKey — это как ChromaKey, но для описания прозрачного цвета используется только базовый цвет, а не цвет + порог допустимых цветов. Помните как в играх 90-х были картинки с розовым фоном цвета Magenta? Вот это оно самое :)
Рисование текста реализовано знакомым для Embedded-инженеров способом: шрифты описываются в формате 8x8, где 8 битов каждого байта обозначают наличие или отсутствие пикселя в текущей позиции. Такие шрифты не только занимают очень мало места, но их также очень легко и быстро рисовать, а также масштабировать под различные разрешения экранов. На данный момент я задумываюсь — стоит ли добавлять в консоль поддержку полноценного UTF-16, если учесть что основной таргет на русскоязычную аудиторию, где и CP866 хватает с головой?
Какой же дисплей чёткий...
❯ Ввод
Далее мы плавно переходим к реализации драйвера ввода. Как я уже говорил выше, все кнопки подключены к своим отдельным GPIO без использования сдвигового регистра или I/O Expander'а, что с одной стороны и хорошо (некоторые китайские производители реализовывают консоли с кнопками, основанными на матричном (!!!) принципе), а с другой — отъедает большинство GPIO у RP2040. Свободными пинами мы могли бы выполнять множество полезной работы: получать уровень заряда аккумулятора у Fuel Gauge, управлять уровнем подсветки с помощью ШИМ-контроллера и ключа, или, в конце-концов, сделать порт для подключения периферии... но нет так нет.
Сам по себе драйвер ввода до жути примитивный: он позволяет получить состояние отдельных кнопок, осей (как Input.GetAxis в Unity) и проверить, нажата ли хоть какая-то кнопка:
Для удобства и портабельности BIOS'а между платами, кнопки геймпада маппятся к соответствующим GPIO в отдельной таблице трансляции, которая также содержит состояния этих самых кнопок:
// Should be layouted in order of EKeyCode enum CButtonState ButtonMapping[] = { { PIN_KEY_LEFT }, { PIN_KEY_RIGHT }, { PIN_KEY_UP }, { PIN_KEY_DOWN }, { PIN_KEY_A }, { PIN_KEY_B }, { PIN_KEY_X }, { PIN_KEY_Y }, { PIN_KEY_LEFT_TRIGGER }, { PIN_KEY_RIGHT_TRIGGER } };
Дело в том, что в нашем проекте недостаточно иметь лишь одно булево: нажата-ли кнопка или нет, для компенсации дребезга кнопок у нас также реализуется задержка перед следующей проверкой и дополнительное состояние для удобства реализации меню — «только что отпущена».
for(int i = 0; i < ButtonMappingCount; i++) { CButtonState* buttonState = &ButtonMapping[i]; bool gpioState = !gpio_get(buttonState->GPIO); // Buttons are pull-up to high when not pressed
// Check if there was elapsed enough time if(timeStamp > buttonState->LastStateChange) { if(buttonState->State == EKeyState::ksReleased) buttonState->State = EKeyState::ksIdle;
Таким образом, мы получаем куда более удобную подсистему ввода, чем условная битовая маска с обозначением каждой кнопки и ручной обработкой её состояний в игре...
Вот мы и подошли к, возможно, самой интересной подсистеме в нашем BIOS'е. Думаю многие читатели так или иначе интересовались тем, как же компилятор и линкер превращают исходный код и объектный файлы в пригодные для выполнения программы и библиотеки. Вопрос запуска нативных программ на микроконтроллерах интересовал и меня — я даже написал целых три статьи об этом: в первой мы поговорили о ESP32 и Xtensa, а во второй реализовали BinLoader путём реверс-инжиниринга и хакинга кнопочного телефона, а в третьей сделали полу-универсальный ElfLoader для нескольких моделей телефонов на разных платформах.
Но начнём мы с простого. Каждая программа делится на три основных секции:
.text — содержит в себе машинный код функций и так называемые Literal pools. Может быть как в ROM, так и в RAM. На системах, где есть возможность выполнять код и в ROM, и в RAM, есть отдельная секция - .iram.
.data — содержит инициализированные переменные, которые обычно попадают в оперативную память. Для статических констант есть отдельная секция, называемая .rodata.
.bss — содержит в себе не-инициализированные переменные, обычно это нули. В исполняемый файл секция .bss напрямую не записывается, остаётся лишь информация о том, каков её размер, а саму секцию затем выделит динамический линкер.
Куда попадут части программы определяет специальная утилита — линкер, которая на основе специального скрипта «раскладывает» данные по нужным секциям. Благодаря этому скрипту, мы можем, например, перенести часть функций в оперативную память для более быстрого исполнения или добавить в начало программы заголовок с описанием приложения.
В моём случае, я решил загружать игры в SRAM и дабы не реализовывать нормальный динамический линкер и релокации, решил выделить под игру фиксированный кусочек оперативной памяти объёмом в 128КБ. Для этого я отредактировал скрипт линкера Pico C SDK так, чтобы сразу после вектора прерываний шла наша программа:
Для компиляции программы также используется кастомный скрипт для линкера и особый Makefile, где после сборки программы мы копируем все её секции в выходной файл в «сыром» виде. Поскольку программа собирается под выполнение из конкретного адреса — пока речь идёт о переносимости только между одной аппаратной платформой. На RP2040, RP2350 и возможно STM32 такое «прокатит», но вот на других ARM-процессорах — большой вопрос!
Каждое приложение, как и базовая система, предполагает использование ООП и поэтому представляет из себя реализацию класса IApplication. Для этого нам нужна некоторая runtime-поддержка: аллокатор, функция для создания экземпляра приложения, а также указатель на ISystem. Именно поэтому каждая программа должна экспортировать специальный заголовок, где содержится указатель на функцию-инициализатор:
Таким образом, для выполнения нашей программы и вызова её обработчиков событий нам достаточно лишь загрузить файл по адресу 0x200000c0 и создать экземпляр IApplication. Всё очень просто и понятно!
Но "моргалка" ведь слишком просто, согласитесь? Поэтому мы с вами напишем ремейк классической игры Змейка, которая работает в настоящие 60 FPS!
❯ Заключение
Вот таким нехитрым образом я понемногу реализовываю свою мечту детства: «андерграунд" консоль собственной разработки. Конечно здесь ещё много чего нужно доделывать перед тем, как начинать разводить свою плату, но начало ведь положено! В контексте GamePi13, я считаю что моя реализация SDK для консоли всё таки немного лучше, чем то, что предлагает производитель «из коробки».
Я понимаю что мой не совсем трушный эмбеддерский подход может вызвать разные ощущения у читателей: так что приглашаю всех заинтересованных в комментарии, обсудим с вами «сломанный Branch-prediction из-за виртуалов», «UB из-за того, что порядок указателей на реализации в VMT может отличаться» и «какого фига игры у тебя оказались в SRAM, а высокопроизводительный код на Flash, если у XIP кэш всего в 16КБ!».
А если вам интересна тематика ремонта, моддинга и программирования для гаджетов прошлых лет — подписывайтесь на мой Telegram-канал «Клуб фанатов балдежа», куда я выкладываю бэкстейджи статей, ссылки на новые статьи и видео, а также иногда выкладываю полезные посты и щитпостю. А ролики (не всегда дублирующие статьи) можно найти на моём YouTube канале.
Если вам понравилась статья...
И у вас появилось желание что-то мне задонатить (например прикольный гаджет) - пишите мне в телегу или в комментариях :) Без вашей помощи статьи бы не выходили! А ещё у меня есть Boosty.
Что думаете о таком формате статей?
Если бы я собрался с духом и произвел 20-50 штучек консолей-самоделок с полностью готовым SDK, примерами и туториалами, купили бы себе такую
Меня зовут Анатолий, и я программист с инженерным бэкграундом. Помимо основной деятельности, бэкенд разработки на Go, меня часто тянет собрать что-нибудь эдакое электронно-светодиодное с использованием микроконтроллеров.
Этап 0: Как всё начиналось
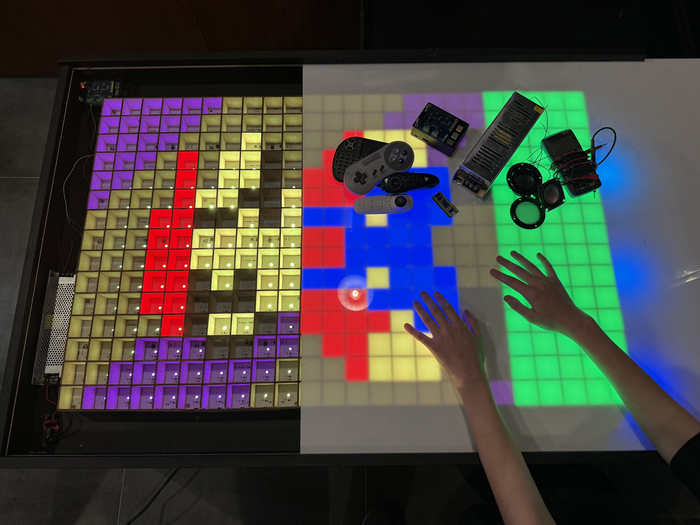
Однажды мне попался на глаза проект пиксельного стола, и я подумал, что было бы круто сделать стол не просто с красивыми визуальными эффектами, а ещё и с играми и звуковым сопровождением, т.е интерактивный. И я начал изучать тему…
Стол из интернета
Этап 1: Исследование существующих проектов
В интернете есть сотни проектов НЕинтерактивных (не реагирующих на касания) столов и матриц на адресных светодиодах, они предназначены исключительно для вывода красивых картинок. Вспомним тот же рюкзак с дисплеем от @AlexGyver:
Схемотехника у всех подобных проектов весьма простая: один контроллер + несколько сотен адресных светодиодов. Но для добавления игровых функций нужно как-то считывать нажатия.
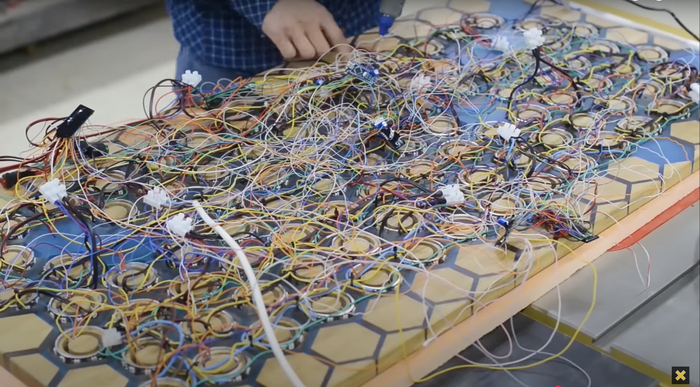
Проектов же интерактивных столов в интернете встречается сильно меньше ввиду сложности электроники и огромных трудозатрат на сборку в домашних условиях.
Часть разработок не имеет обратной связи на нажатия, а выступают просто красивым светодиодным декором, а нам нужны интерактивные функции для игр и других эффектов. Это в разы усложняет разработку;
Все существующие проекты собраны на коленке и имеют огромные недочёты в плане трудозатрат на сборку: несколько сотен проводных соединений и точек пайки, десятки человекочасов работы. Такое нам не подходит, я слишком ленив, чтобы руками всё это паять, а значит нужны печатные платы без проводных соединений, разъём-в-разъём, плата-к-плате, side-by-side;
Конструкция корпуса зачастую тоже достаточно сложная, с вырезами/выпилами, с клеем или герметиком. Такое тоже не нравится, нужно что-то максимально простое из обычного мебельного ЛДСП, чтобы можно было заказать раскрой на ближайшем производстве;
Этап 2: Проектирование печатной платы
Изначально я решил сделать стол размера 25х15 пикселей, эдакий правильный прямоугольник со сторонами, кратными 5, т.е весь стол можно собрать из 15 плат размера 5х5, я называю их сегментами.
В качестве канала связи рассматривал RS485 и CAN:
RS485 подразумевает топологию master-slave, т.е нужно явно опрашивать все ведомые устройства, чтобы избежать коллизий, что будет сложно реализовать для такого количества пикселей;
А вот CAN позволяет организовать сеть равнозначных устройств и даже имеет аппаратный механизм арбитража коллизий. Идеальное решение для построения событийной модели обработки нажатий: есть клик – отправили, клика нет – молчим. Короче говоря, сообщения о нажатии отправляются в шину вне очереди, что позволит обрабатывать нажатия в кратчайшие сроки.
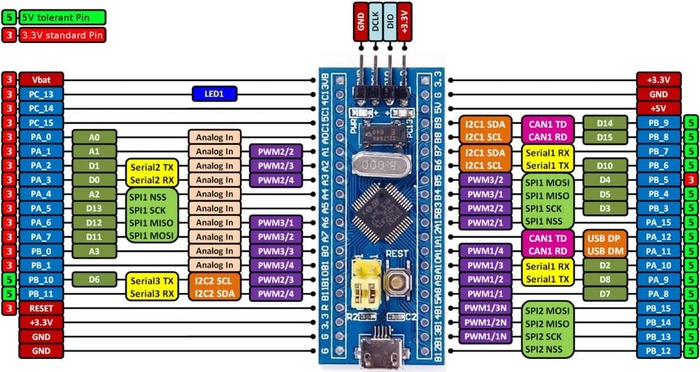
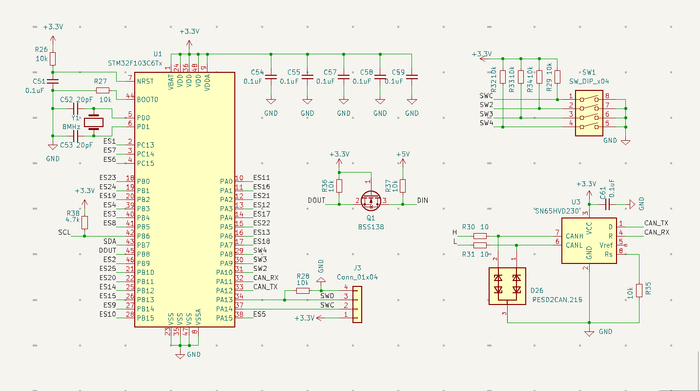
В качестве микроконтроллера был выбран самый популярный и дешёвый микроконтроллер с CAN шиной на борту – STM32F103, имеющий к тому же десятки китайских клонов на случай необходимости дальнейшей оптимизации по цене/наличию. Наверняка у каждого здесь есть завалявшаяся дома платка Blue Pill с подобным контроллером. Вот и у меня была.
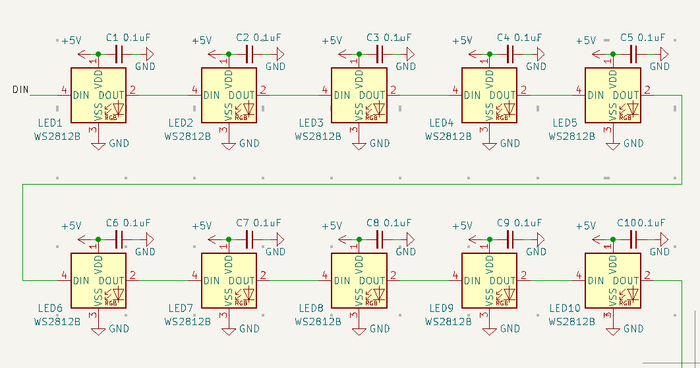
В качестве светодиодов были выбраны обычные RGB адресные WS2812B. Тут всё очевидно – работают независимо при последовательном подключении:
В качестве датчика нажатия был выбран оптический сенсор VCNL36821S, комбинирующий в себе светодиод и фотодиод, работающие в ИК диапазоне длин волн 800..1000нм, а значит он не будет реагировать на RGB спектр светодиодов 400..700нм. С другой стороны, это не самое дешёвое решение, но точно одно из самых простых при автоматизированной сборке печатных плат. Один smd элемент и готово, никаких тебе емкостных сенсоров в виде улиток из проволоки (вспоминаем про желание избежать трудоемкости при сборке).
VCNL36821S
Сколько датчиков и светодиодов можно подключить к одному контроллеру STM32F103 в корпусе LQFP-48 без использования всякого рода расширителей портов? Все звёзды сошлись на размере сегмента 5х5 = 25 пикселей. В прототипе задействованы абсолютно все ноги контроллера, даже пришлось позаимствовать одну ногу SWD из разъёма для программирования.
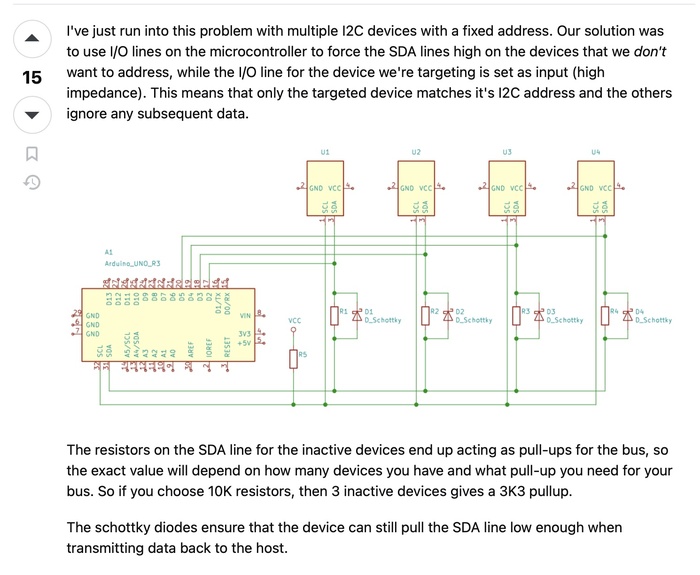
Одна из сложностей при проектировании печатной платы заключалась в том, что у сенсора VCNL36821S отсутствует возможность задавать адрес I2C, а у микроконтроллера STM32F103 только две шины I2C. Как же быть? Ответ был найден на просторах Stackoverflow и заключался в коммутации линии SDA через диоды Шоттки. Гениально, как мне кажется:
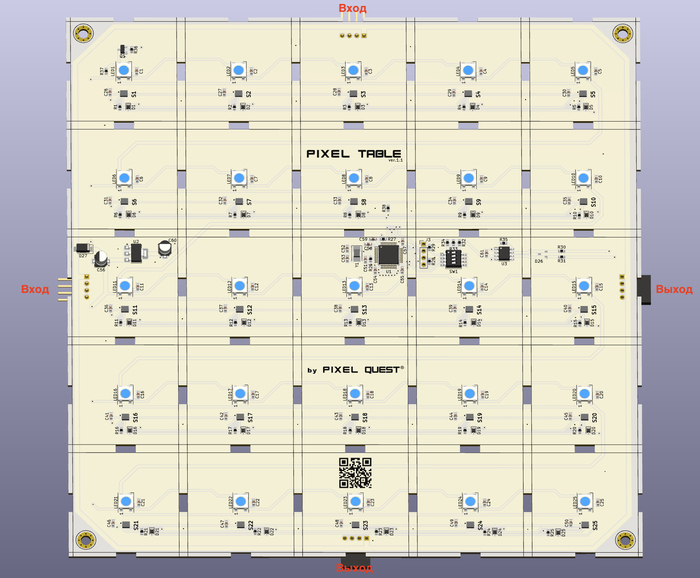
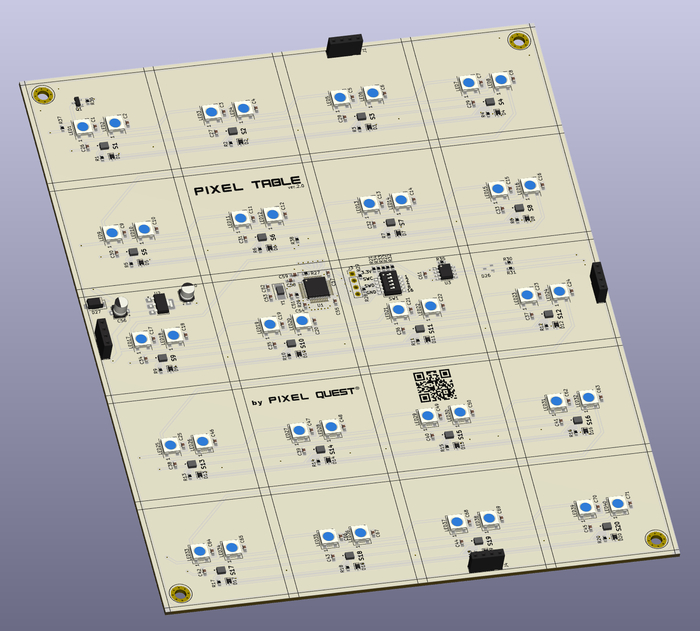
Повторюсь, очень важно было избавиться от тысячи соединений на проводах и необходимости тратить сотню человекочасов на сборку. Поэтому плата разведена таким образом, чтобы вся сборка заключалась в последовательном соединении плат между собой на разъёмах и вообще не требовала дополнительной пайки. Вот что в итоге получилось:
Версия 1.0
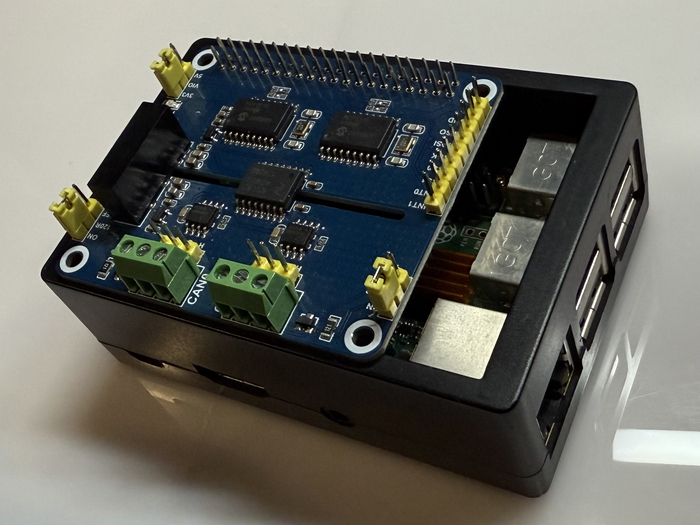
Управлять столом будет обычная Raspberry Pi 4B+ вот с такой платой расширения для CAN шины:
Сами платы были заказаны в Китае на PcbWay с автоматизированной сборкой, т.е сам я ничего не паял.
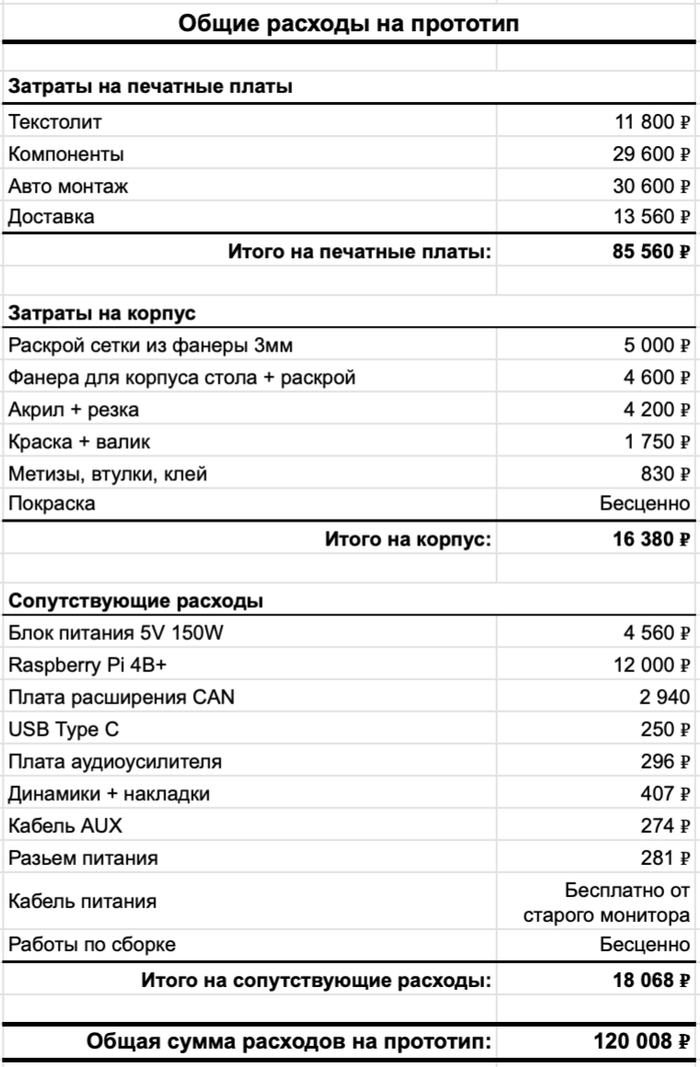
Ну и затратная часть на платы:
Текстолит * 15 плат = 11 800 ₽
Компоненты * 15 плат = 29 600 ₽
Авто монтаж * 15 плат = 30 600 ₽
Доставка с Китая = 13 560 ₽
Итого: 85 560 ₽
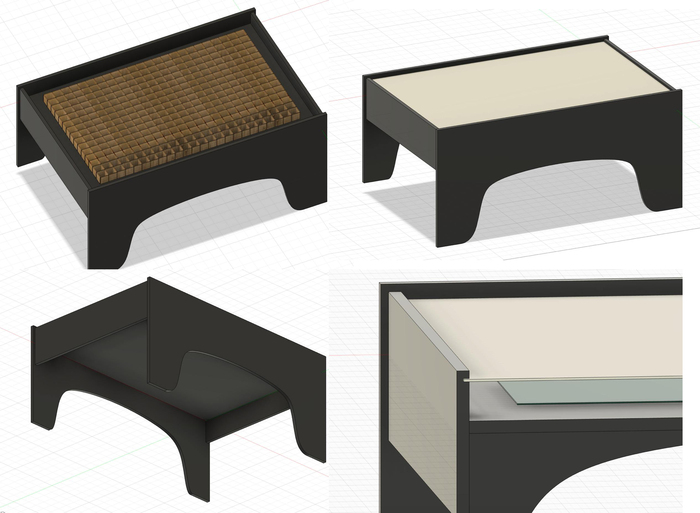
Этап 3: Проектирование корпуса
Имея размер одной печатной платы, можно собрать всё это в деревянный корпус. Я выбрал формат обычного журнального столика.
В прототипе я решил сделать у стола равномерные отступы, чтобы расположить там малинку, блок питания и динамики, но позже понял, что это было плохой идеей:
Во-первых, такой отступ становится весьма неочевидным в играх, например пинг-понг, когда мячик отражается от невидимой стены;
Во-вторых, эстетически это смотрится весьма странно, когда поле светится не всё.
Для написания кода использовал программы STM32CubeMX и STM32CubeIDE, для прошивки и отладки китайские клоны программатора ST-LINK V2 и логического анализатора Saleae Logic. Вообще обожаю эту связку, никогда ещё программирование и отладка микроконтроллеров не были настолько простыми и доступными.
Из интересного, что можно было бы рассказать про написание прошивки:
Т.к контроллер весьма небольшой, и чтобы не тащить в проект тяжеловесную RTOS, я часто использую самописную систему событий, привязанную к 1 мс таймеру. Занимает буквально сотню строчек кода: установить событие через N мс, проверить готовность события к исполнению, очистить событие. Это покрывает практически все мои нужды по организации логики программы под микроконтроллер и занимает памяти чуть более, чем ничего.
Отдельно хочу рассказать про логику организации мной адресного пространства CAN. Я разбил адресное пространство 2048 адресов на 4 группы:
широковещательная команда;
целевые команды конкретным сегментам;
посылки от сегмента;
и в конце простые пакеты с цветами.
В CAN, чем ниже адрес пакета, тем у него выше приоритет. Это означает, что посылки от устройств (с кликом или ответом на запрос) имеют приоритет выше, чем пакеты с цветами. Таким образом, клик всегда будет получен почти мгновенно, даже когда идет активная “отрисовка” картинки и шина занята.
В коде я реализовал поддержку трех разных палитр:
RGB6 – 6 бит на цвет, где 3 бита цвет RGB, а 3 бита яркость 0-7;
RGB12 – 12 бит на цвет, RRRRGGGGBBBB;
RGB24 – 24 бита на цвет.
Т.к в стандартном CAN есть ограничение на 8 байт данных, то приходится делить адресные пространства ещё и на адреса конкретных пикселей внутри сегмента. А т.к на каждые 8 байт данных полезной нагрузки CAN имеет ещё оверхед 47 бит в виде адреса и других заголовков пакета, то с расширением палитры цветов, FPS падает непропорционально. Примерно вот таких значений мне удалось добиться при скорости CAN 500 kbit/s:
75 FPS для RGB6;
38 FPS для RGB12;
13 FPS для RGB24;
Я остановился на палитре RGB12: достаточная цветопередача при сохранении адекватной частоты кадров. Стоит отметить, что это максимальная частота кадров изображения, а с наличием большого числа нажатий, частота кадров будет проседать, т.к вспоминаем про приоритет кликов над пакетами цветов.
Для любознательных, ссылки на исходники платы и прошивки будут в конце статьи.
Расходы: бесплатно по ночам.
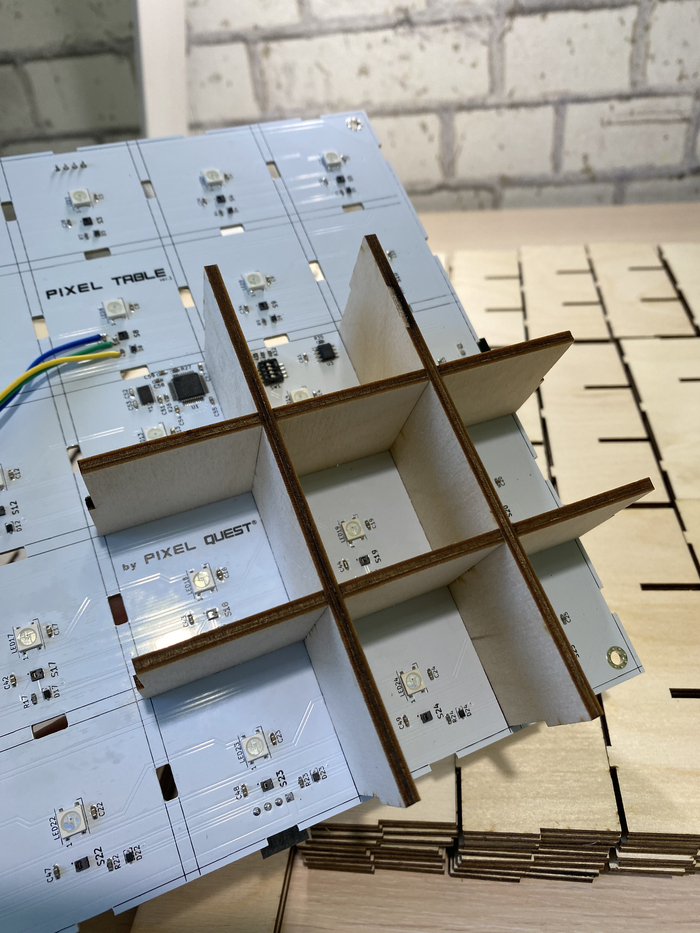
Этап 5: Финальная сборка и ошибки
Собрать всю сетку из таких коротких деревянных ламелей оказалось непросто. Я не предусмотрел достаточные допуски для пазов, детали то и дело не вставали на свои места, приходилось подпиливать и применять силу, в итоге плоскость с оргстеклом получилась неидеальной. В новой версии откажусь от пазов в платах, а ламели из фанеры сделаю длиннее, чтобы конструкция сетки получилась более ровной;
Как вы могли заметить, на платах я сделал разъёмы папа-мама на нижней стороне текстолита. Такая конструкция очень удобна при сборке и стоит три копейки, но делает стол абсолютно непригодным для ремонта, т.к нет возможности достать и заменить одну плату, приходится откручивать всех соседей;
Оргстекло, которое я нашел на местном производстве, как оказалось, плохо подходит для оптического сенсора, т.к имеет слабую светопропускаемость. Это приводит к очень маленькому полезному сигналу с датчиков и необходимости искать компромисс между ложными срабатываниями и “силой” (читай – площадью) нажатия;
Также я допустил небрежность и запитал всю матрицу плат двумя тонкими проводами… Как вы можете догадаться, долго такая сборка не проработала, больше 20А в пике как-никак. Решение простое – подкинуть питание ещё в несколько точек по периметру.
Сопутствующие расходы:
Блок питания 5V 150W = 4 560 ₽
Raspberry Pi 4B+ = 12 000 ₽
Плата расширения CAN = 2 940 ₽
USB Type C = 250 ₽
Плата аудиоусилителя = 296 ₽
Динамики + накладки = 407 ₽
Кабель AUX = 274 ₽
Разъём питания = 281 ₽
Кабель питания = Бесплатно от старого монитора
Сборка своими руками = Бесценно
Итого: 18 068 ₽
Этап 6: Управляющее ПО на Малинке
Моя любимая часть, моя гордость…
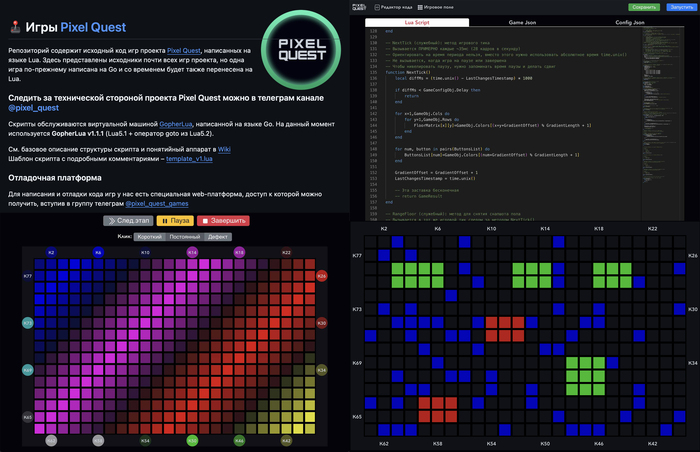
Годом ранее, работая над своим основным проектом Pixel Quest, я к нашему бэкенду на Go подключил Lua интерпритатор. С тех пор все игры нашей сети локаций разрабатываются на Lua.
Для Pixel Quest мы сделали открытую систему разработки игр. Что это значит:
во-первых, у нас есть визуальный конструктор игр "Пол–это лава", где можно попрактиковаться в покадровой отрисовке игр;
а во-вторых, у нас есть собственная онлайн IDE для разработки игровых сценариев на простом скриптовом языке Lua, который может освоить любой толковый школьник за несколько вечеров, при этом исходный код наших игр публично открыт в репозитории на GitHub, что делает обучение ещё проще.
В свой онлайн редактор для удобного тестирования игр мы добавили вот такую 3D визуализацию:
Также хочу отметить, что у проекта есть поддержка разных беспроводных геймпадов, что значительно расширяет игровые возможности.
Почему нас сравнивают с Roblox?
Роблокс даёт возможность игрокам самим разрабатывать игры и даже зарабатывать на них, и мы в перспективе хотим сделать что-то похожее. А ещё на ютубе нашу игру “Безопасный цвет” постоянно сравнивают с играми “Color blocks” или “Block party” из Roblox, хотя когда я её разрабатывал, я ещё ничего не знал о Роблоксе...
За счет открытости и легкости кода игровых скриптов, появляется возможность обучения детей программированию с дальнейшим тестированием на столе или даже на большом пиксельном полу в любом из наших центров.
Визуальный покадровый конструктор игр Пол – это лава
Этап 7: Версия 2.0
Для будущей версии я переразвёл печатную плату с учетом предыдущего опыта, а именно:
сделал разъёмы не горизонтальными, а вертикальными, таким образом можно будет вынимать и устанавливать отдельные платы. Платы между собой будут соединяться П-образными штырьками;
удвоил количество светодиодов, чтобы получить более яркую и сочную картинку, а также резервирование на случай выхода светодиода из строя;
сделал плату размером 4х5 пикселей, чтобы избавиться от “рамки” по краям и получить поле нужного размера 24х15 для совместимости с игровыми комнатами, а также расширить диапазон возможных CAN адресов с 16 до 32, что даст возможность строить столы большего размера;
Нашёл в Китае и протестировал новое более тонкое и более прозрачное оргстекло, которое даёт более чёткий рисунок граней пикселей и увеличивает полезный сигнал с датчиков в три раза, что делает игру более комфортной, а ложные срабатывания сводит к нулю.
Сам прототип с видео сейчас стоит и радует детей на одной из наших локаций, а именно в городе Смоленске.
Ссылки на исходники печатных плат, прошивки под микроконтроллер и другие полезные материалы по проекту можно найти вот в этом телеграм посте (будет обновляться): t.me/pixel_quest/360. Там же в канале будет выкладываться и новая информация по проекту.
Исходники управляющего ПО в открытом виде дать не готов, т.к они представляют коммерческую ценность, но в случае, если стол вызовет достаточный интерес у комьюнити, мы сможем предоставить специальную версию для запуска игр и удобной разработки собственных Lua сценариев.
Далее хотим попробовать наладить серийное производство. Мы считаем, что потенциал у проекта огромный, хотелось бы его развивать.
Какие сценарии развития продукта мы видим:
Установка в школы программирования или робототехники для обучения детей. Я сам разработчик и сам когда-то посещал подобный кружок программирования, думаю такой яркий стол сможет вызвать дополнительный интерес у ребят к разработке. А тем более возможность прийти поиграть в свою игру на большом пиксельном полу!
Установка в виде вендинговых игровых автоматов в ТЦ и для привлечения внимания к нашему основному бизнесу;
Размещение на локациях Pixel Quest в качестве дополнительного развлечения;
Использование в качестве отладочного стенда для тестирования ПО, игр и различных эффектов в миниатюре.
Если вдруг кто-то захочет собрать стол в домашних условиях и поучаствовать в разработке эффектов и игр, готовы помочь с закупкой и доставкой электроники с Китая. В последнее время с этим стало сильно сложнее, но у нас есть наработанные каналы оплаты и доставки.
Как вы считаете, в каком направлении больше перспектив?
Когда у тебя дома валяется Arduino, ESP8266 и пылится Raspberry Pi, долго держаться не получится. Я знал, что в какой-то момент скажу себе: «А не собрать ли умный дом своими руками?» — ну и, конечно, сказал 😅
Хотелось чего-то простого: чтобы включать свет 💡, проверять температуру 🌡️, перезапускать роутер 📡 (да, я устал дергать вилку вручную) — и всё это с телефона, в пару касаний. Telegram показался идеальной платформой: он у всех есть, работает быстро, и... ну, боты — это кайф 😎
📦 Из чего я собирал:
Arduino UNO — брал на себя датчики и реле
ESP8266 — делал Wi-Fi-связь между железом и сетью
Raspberry Pi 3B+ — крутил Telegram-бота на Python
aiogram — та самая библиотека, с которой работать — одно удовольствие ⚡
И, конечно, жменька проводов, паяльник и терпение 🧪
Запуск получился примерно такой: Raspberry принимал команды в Telegram — через aiogram, естественно. Там всё по уму: asyncio, FSM, роутеры, вся эта красота. Я сделал хэндлеры для команд вроде:
/light_on 💡 — включить свет в спальне
/temp 🌡️ — показать температуру на балконе
/restart_router 🔁 — отдельное реле, подключенное к роутеру
/photo 📸 — Pi присылает фотку с кухни через камеру
Когда команда прилетала — Pi швырял HTTP-запрос ESP-шке, та передавала команду Arduino, и магия случалась ✨. Да, это звучит как схема доставки пиццы с участием дрона, но оно работало!
🛠️ Сюрпризы были, как без них:
Однажды ESP зациклилась, и реле включалось/выключалось каждую секунду. Свет в ванной начал жить своей жизнью. Бот бодро слал мне:
💡 Свет включён 💡 Свет выключен 💡 Свет включён 💡 Свет выключен
Кот охренел и убежал за шкаф. Я — перешил прошивку ночью 🙃
Семья быстро привыкла: 👨🦱 Батя шлёт /heat_on, когда на даче холодно. 👧 Сестра тыкает в кнопки «✨ гирлянда» и «☁️ режим уюта». 👩🦰 Жена возмущается, когда бот отвечает дольше 2 секунд — «почему наш ИИ такой тормоз?»
Потом я добавил inline-кнопки, авторизацию по Telegram ID (да, после того, как забыл закрытый репозиторий с токеном — спасибо GitGuardian за уведомление в почту 😅), и бот стал реально домашним.
📸 Из фишек:
Фото с кухни 🧀 — присылает на команду
Уведомления в Telegram, если температура упала ниже 18°C ❄️
Перезагрузка интернета через /restart_router — кто поймёт, тот поймёт
Пуш-оповещения, если свет остался включён на ночь 🌙
Сейчас думаю переписать всё под Home Assistant, но честно? Бот стал привычной частью дома. Он не просто выполняет команды — он реагирует, напоминает, заботится. Псевдо-умный дом, сделанный из запчастей и Python-а — но свой, родной, как тёплый Arduino в ладони 😌
Если ты тоже делаешь или хочешь сделать Telegram-бота для управления домом — не бойся, просто начни. aiogram действительно топ, даже для начинающих. А если интересно — могу выложить схемы, код и пример docker-сборки на Raspberry 💻
📌 Поддержи плюсом, если понравилось. Или напиши в комментах, какую функцию добавить в бота: чайник, жалюзи, кормушку для кота — всё можно собрать, если не боишься слегка пахнуть паяльником 🧑🔧
Переделал схему питания, чтобы лидар можно было включать отдельно, по своей линии питания. У него потребление ~400мА, больше, чем вся остальная логика, включая Orange PI.
Собрал, включил. На python написал простейший скрптец, чтобы увидеть данные, которые он шлёт. Увидел ))
Следующий этап - подключение лидара к ROS2-ноде и визуализировать данные на RViz.