Всем привет!
Продолжение описания сборки тяжёлого экзоскелета
Первая часть тут
https://pikabu.ru/story/tyazhyolyiy_yekzoskelet_chast_1_7218275
Остановились мы на стадии установки ног и монтажа приводов рук.
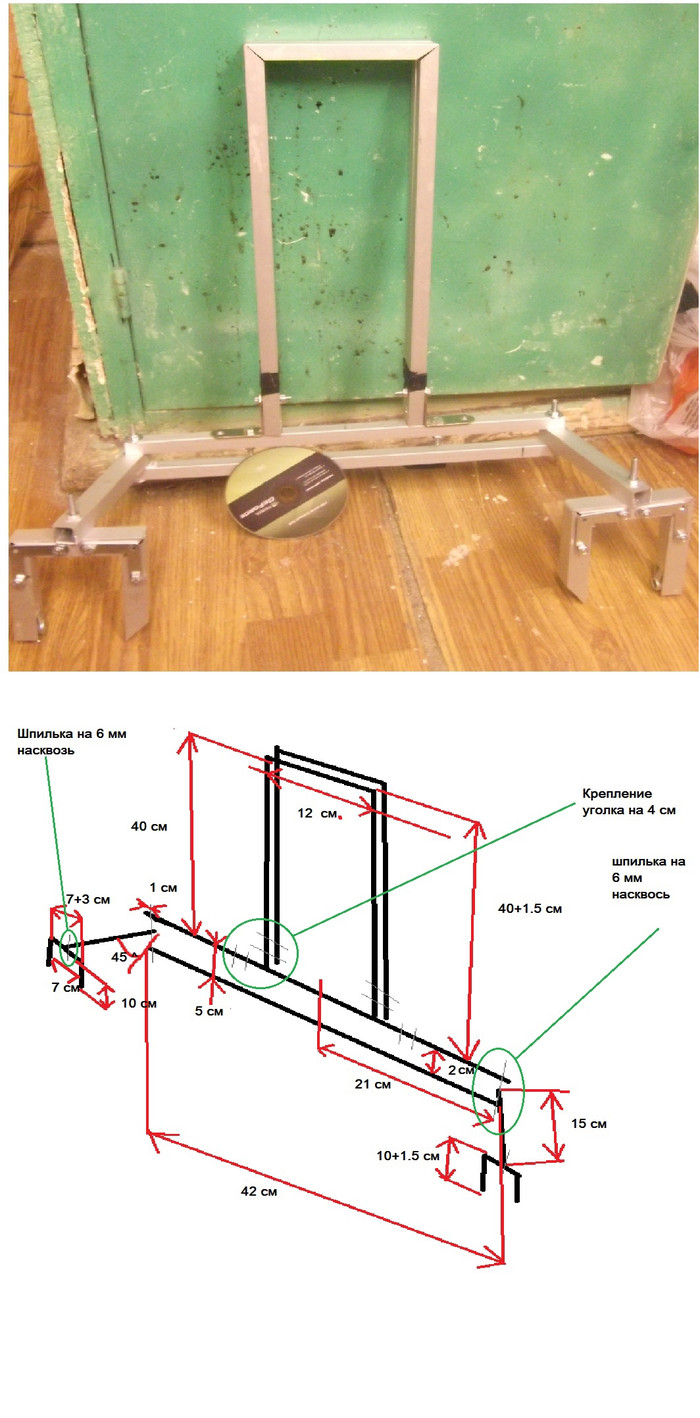
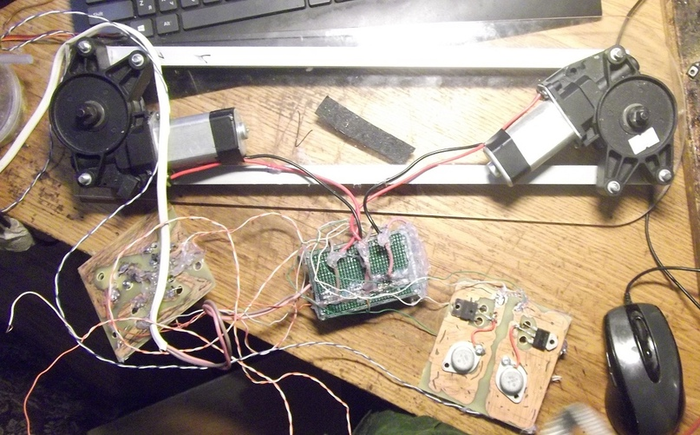
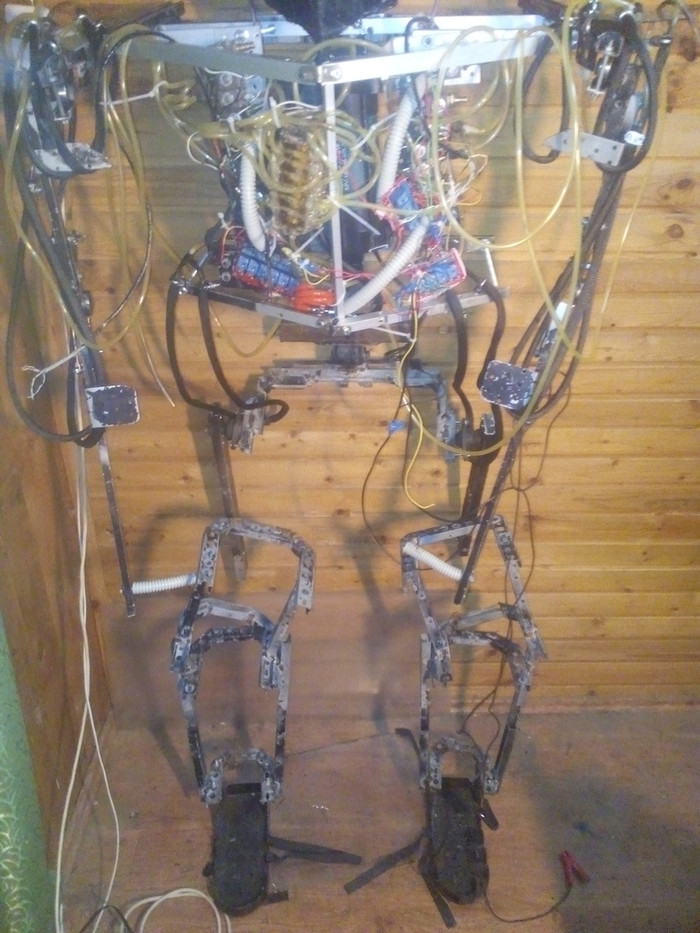
Где то на этой стадии разводка пневмопроводов и электроники была завершена и можно было хоть что то уже проверять. Ноги, как можно увидеть, только пока начали обрастать необходимыми компонентами и даже не могли удержать скелет стоя. В качестве бедер там использовались пальцевые шарниры от машины. Они очень мощные и неплохо подходят для таких тяжелый скелетов. Для лёгких же или средних это не самый хороший вариант.
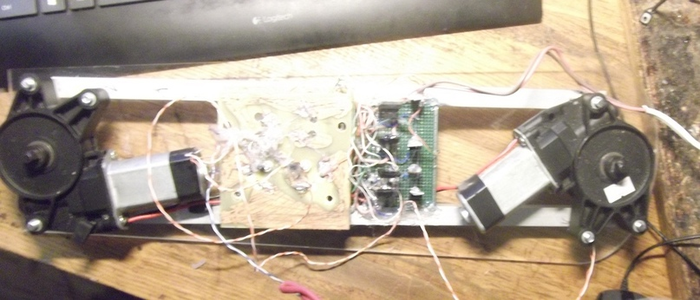
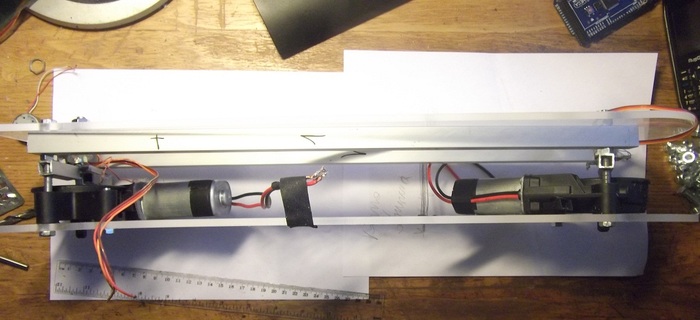
Ноги сгибались в коленях, бедрах и ступнях. Сами ступни не гнулись. Кроме того был один мощный шарнир в спине. Это должно было помочь одевать скелет и нагибаться в нём. Чтобы скелет не свернулся этот сустав всегда был зажат пневмомускулами, играющими роль пружин с изменяемой жесткостью.
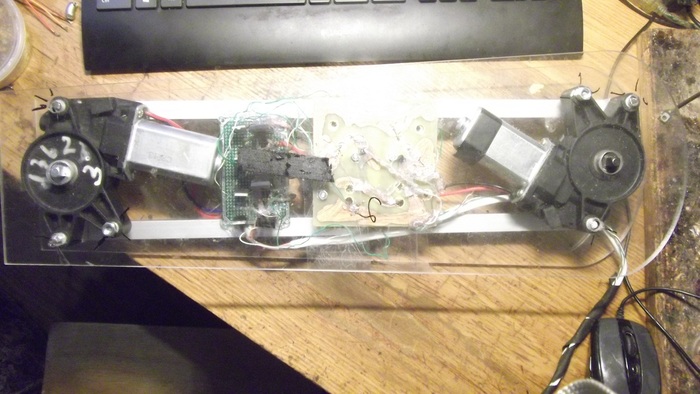
Ноги отсоединялись от спины и всей остальной части. Тут можно увидеть 2 дырки — через них проходили болты и соединялись низ и верх скелета. Кроме того также были добавлены амортизаторы из газлифтов
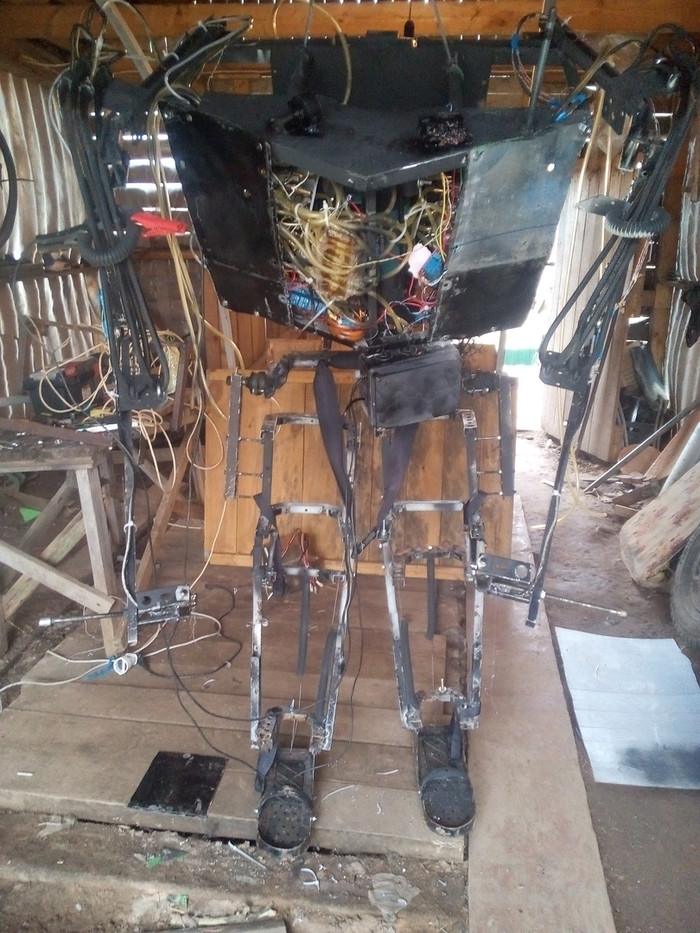
Погода к этому времени улучшилась и было решено перекатиться в гараж. Да и там места для маневра значительно больше. Даже без обшивки выглядит внушительно! Почти как андроид.
К рукам были приделаны П-образные элементы. В них были установлены кнопки, через которые всё собственно и управлялось.
Где то на этой стадии появились аккмуляторы. Их было совсем немного — просто для тестов. А то каждый раз тянуть питание было уже неудобно.
Находились они в той коробочке внизу-слева грудины.
Конечно же не всё что гладко и были многие проблемы. Особенно с пневматикой, которая постоянна текла и вздувалась, но потом и этот момент более менее стабилизировался.
Видео
https://vk.com/video-112940624_456239058
Постепенно скелет полностью оброс обшивкой. Пневматика и электроника была защищена.
Кроме того на верх грудины были выведены индикаторы давления в системе и напряжения/потребления тока. По сути это были все основные параметры. Можно было сразу понять если что то было не так.
После покраски внешний вид стал вообще отличный.
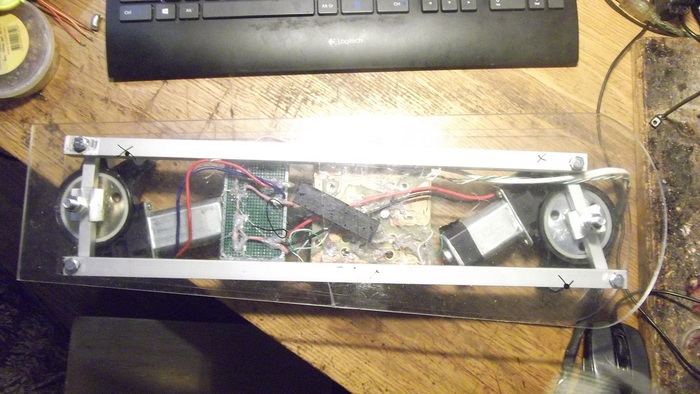
В ногах стояли возвратные пружины. Они помогали экзоскелету сохранять вертикальное положение,, то есть тянули ноги на выпрямление. Сами ноги прижимались шлейфами с замками и металлическими затяжками.
Сбоку лучше видно руки и множество кнопок расположенных на самом конце. В процессе работы было решено что самое простое управление для первого прототипа это более оправдано, чем городить сверхсложные системы.
Прилёг отдохнуть.)
Можно увидеть что внутри там места должно было быть очень много. Человек, к слову, должен был входить в него сбоку.
Вот как то так. Очень много не получилось, но многое всё же вышло как надо. Не получилось сделать нейроуправление, ибо к тому времени просто не было достаточного количества опыта, но получилось сделать реально тяжелый полностью закрывающий экзоскелет.
К сожалению он так и не был доведен до конца, но был вполне работоспособен. Сейчас же смысла доводить его уже нет — делается намного более совершенный тяжелый экзоскелет — PG-16-ERI, который будет совершенно новой ступенью в тяжелых экзоскелетах.
СПАСИБО ЗА ВНИМАНИЕ.
Не забываем что есть группы и дискорд, где можно прочитать про подобное или же задать вопрос.
https://vk.com/exomech
https://www.facebook.com/Exomech
https://discord.gg/pMZN7TM