Первый прототип медицинского экзоскелета. Часть 2
Хаюшки, пикабу
Продолжение вот этого поста https://pikabu.ru/story/pervyiy_prototip_meditsinskogo_yekzoskeleta_chast_1_8287982
Напомню что мы собираем вот такой экзоскелет.
Зачем? - спросите вы
Потому что можем - отвечу я.

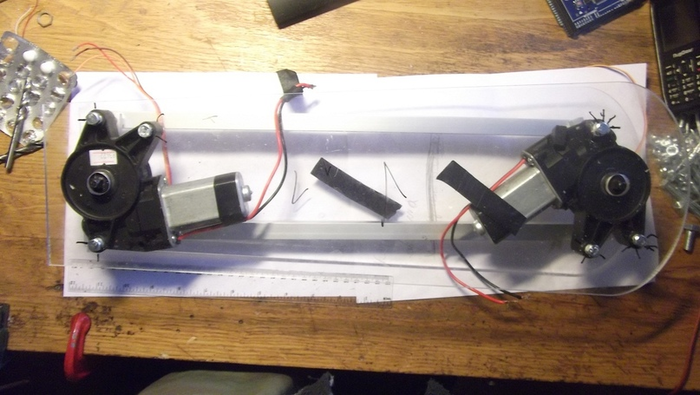
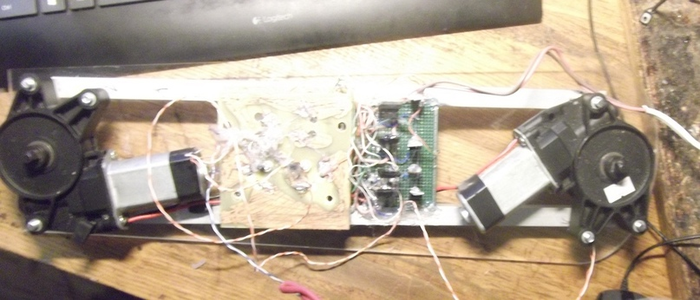
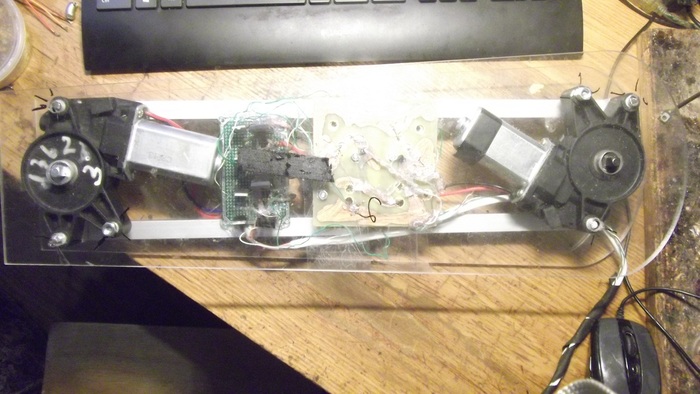
Остановились мы на изготовлении основных бедренных частей. В них устанавливается основная электронная начинка- приводы и драйверы моторов.

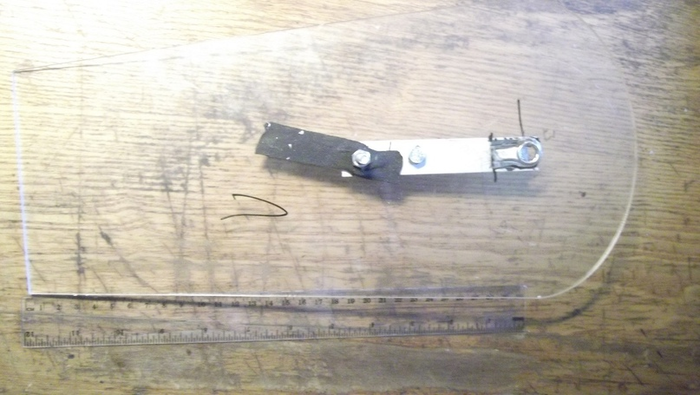
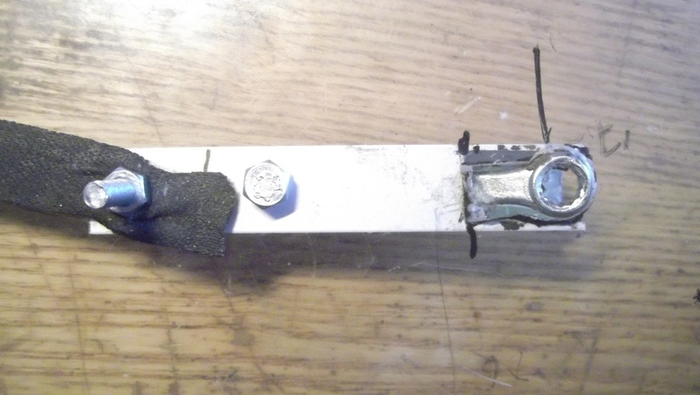
Бедренные элементы должны вращать коленные через алюминиевые вставки, в которых ещё и установлены гаечные ключи. Только так можно передать большой момент силы и не выломать корпус и оргстекло.

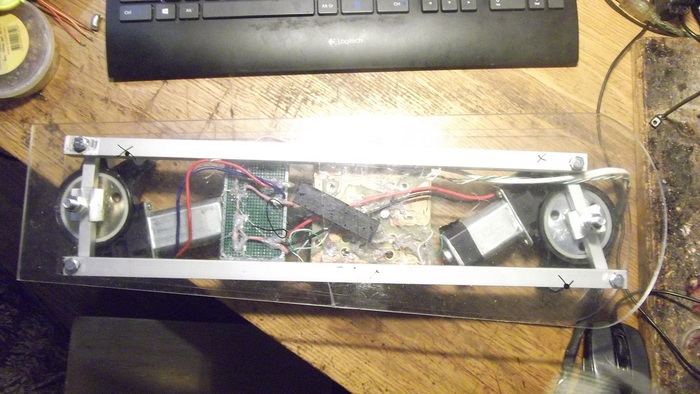
Кроме аналогичного бедренного алюминиевого каркаса также в каркасе колена установлены раздвижные элементы. Они нужны для более точно настройки длины ног под пилота. Все также же стягивается длинными болтами на 6мм.

Если коленная часть может вот так держать бедро на приводах, то значит зажимы и оси работают как надо. Люфты если и есть то должны быть минимальные.

Ноги можно считать готовыми. Обязательно нужно протестировать как работают сервы, дабы потом после покрытия слоем угольной ткани не пришлось всё вскрывать. Ноги это 90% работы над этим экзоскелетом, но спина и бедра это тоже очень важный элемент. К счастью в отличии от ноги тут не так плывут параметры - благо спины более менее у всех одинаковые в размерах. Примерный чертеж спины и бедер вот выглядит вот так.
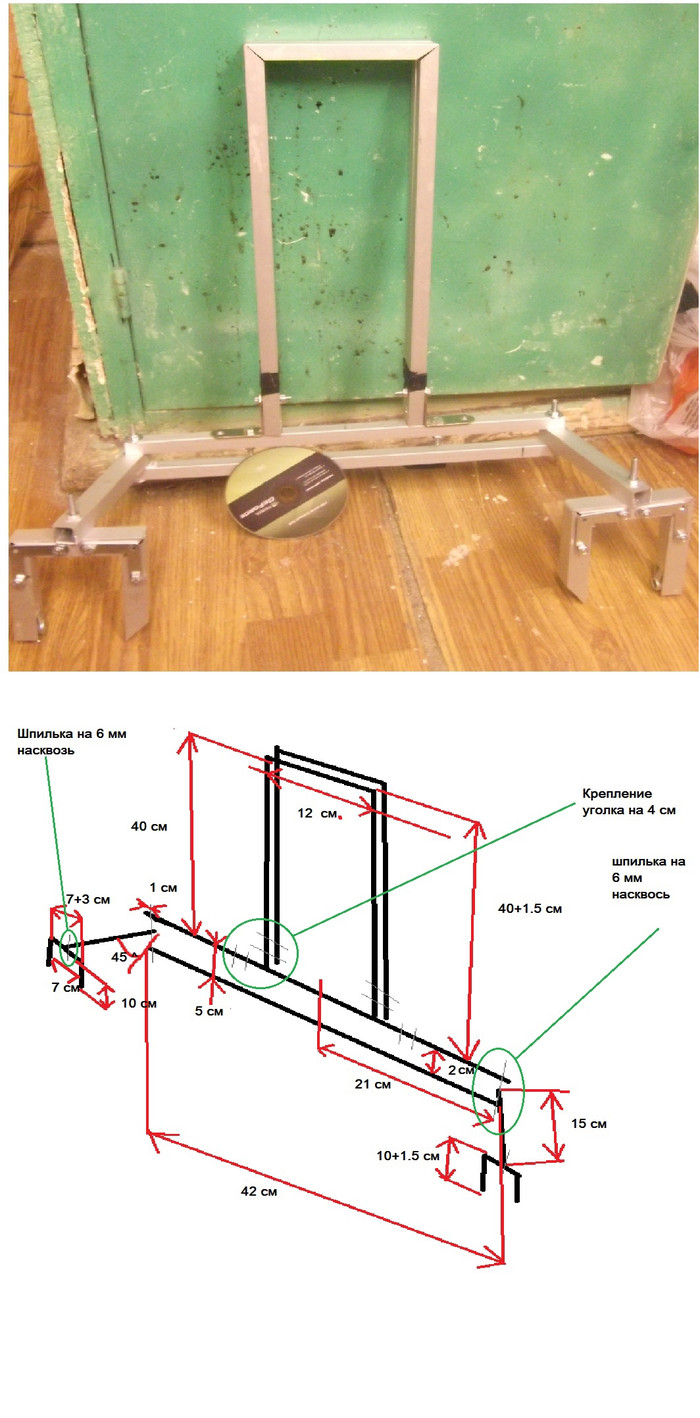
Каркас спины и бедер состоит из алюминиевого профиля и соединен шпильками. Для закрепления основной П образной основы используются стальные уголки 40 на 40 мм. Сама спина не является нагруженным элементом поэтому тут и не требуется массивное усиление. В спине будут располагаться основной контролер - ардуино мега, датчик наклона - гироскоп и самый обычный литиевый аккумулятор на 12 в и 10 а*ч.

Бедро сбоку выглядит вот так. Сильно нагружать оно не должно,поэтому тут все очень минималистично.

Электроника в спине располагается свободно и прижимается в дальнейшем слоем оргстекла. Датчик наклона надо расположить в самой верхней точке спины экзоскелета. Это позволит создать максимальный угловой ход и дать наибольшую чувствительность - человеку не нужно будет сильно наклоняться чтобы запустить или отключить приводы. Хватит и небольших (в 10 грудусов) наклонов чтоб уверенно запускать систему.
Не забываем сделать пропилы для усб сбоку каркаса. Это нужно чтоб можно было программировать и корректировать коды управления экзоскелетом в ардуино.

Спина и ноги это отдельные элементы и их можно как объединять так и разъединять. Питание и сигналы в ноги идут по специальным шлейфам. Соединялась вся проводка через штекера от витой пары.
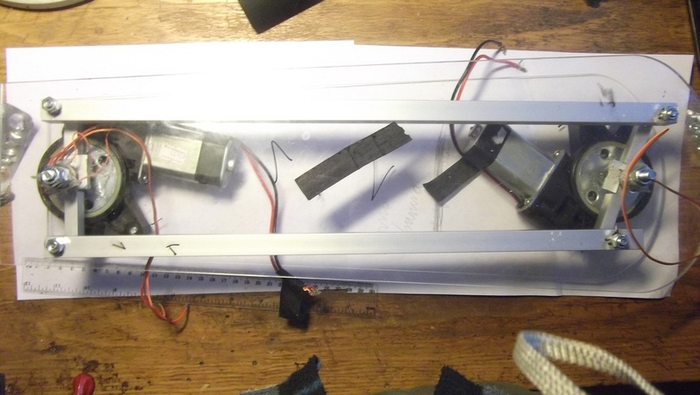
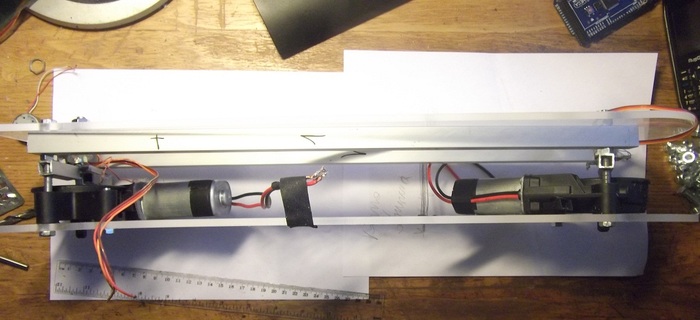
Собранный каркас спины и ноги выглидят примерно так без обшивки и электроники. Из ног сервоприводы уже без разборки не вытащить. Кроме того на осях моторов по сути и держится вся нижняя часть ноги.

Соединительные штекера. Через них шло питание моторов и сигнал на контролер сервов.

После изготовления каркаса и монтажа всей электроники проводится стендовая проверка и если всё хорошо то начинается самый грязный этап - покрытие всего экзоскелета углетканью и пропитка полиэфиром.

Для крепления экзоскелета к ногам применяются обычные портфельные шлейфы и замки. Это неплохое и дешевое решения для первого прототипа подобного экзоскелета, но потом однозначно нужно делать ортезоподобное крепление.

Экзоскелет очень простой в монтаже и наладке, но всё же является прототипом. Можно сказать отправной точкой. Далее его наработки были многократно улучшены, но начало медицинского направления было положено именно с этого экзоскелета. Первые эксперименты у углем и первые мощные, но самодельные сервоприводы появились именно отсюда. Делался он к слову в общежитии ИАТЭ НИЯУ МИФИ (в лесу которая). Совсем без нормального инструмента. Так что поэтому и вышло что вышло. Было бы желание, как говорится.

На этом всё.
НАПОМИНАЮ
Подробней про любые бионические устройства можно узнать в наших группах
https://www.facebook.com/Exomech
https://www.instagram.com/exomech_official/
или дискорд-конференции
Спасибо за внимание!