


Тяжёлый экзоскелет. Часть 1
Всем привет.
Хочу рассказать о том как происходила сборка тяжёлого экзоскелета. Точнее раннего прототипа, но суть.Думаю будет интересно. Такого в интернете не найдешь теперь)
Делался этот экзоскелет в 2018 году с февраля и по апрель...и так и не был доведён до конца.
Рассматривать мы будем первый прототип тяжёлого экзоскелета — PG-14-L . Не самый удачный проект, но и не самый плохой. Отлично помог для проработки концепта тяжелого скелета, его кинематики и моделирования силовой составляющей. Без 14 модели расчета силовой части для нового тяжелого скелета не было.

Сборка этого экзоскелета была очень мучительной и долгой, впрочем как обычно, и началось это всё со сборки грудины. Каркас этого скелета состоял из квадратного профиля 20*20 и шпилек на 8мм. Кроме того в некоторых местах использовались соединительные стальные шины и пластины. Первые были элементом укрепления для рук, а на пластины крепилась вся пневматика.

Самое первое и самое основное что крепилось сразу это компрессор. Относительно его длины и определялось всё. Важно также что весь это скелет собран без сварки, а только на болтах. То есть он полностью разборный и сборный. Как конструктор.

А вот так это будет выглядеть сбоку. Тут уже лучше видно двухцилиндровый компрессор, расположенный в самом центре грудины. Он является «сердцем» всей силовой части.

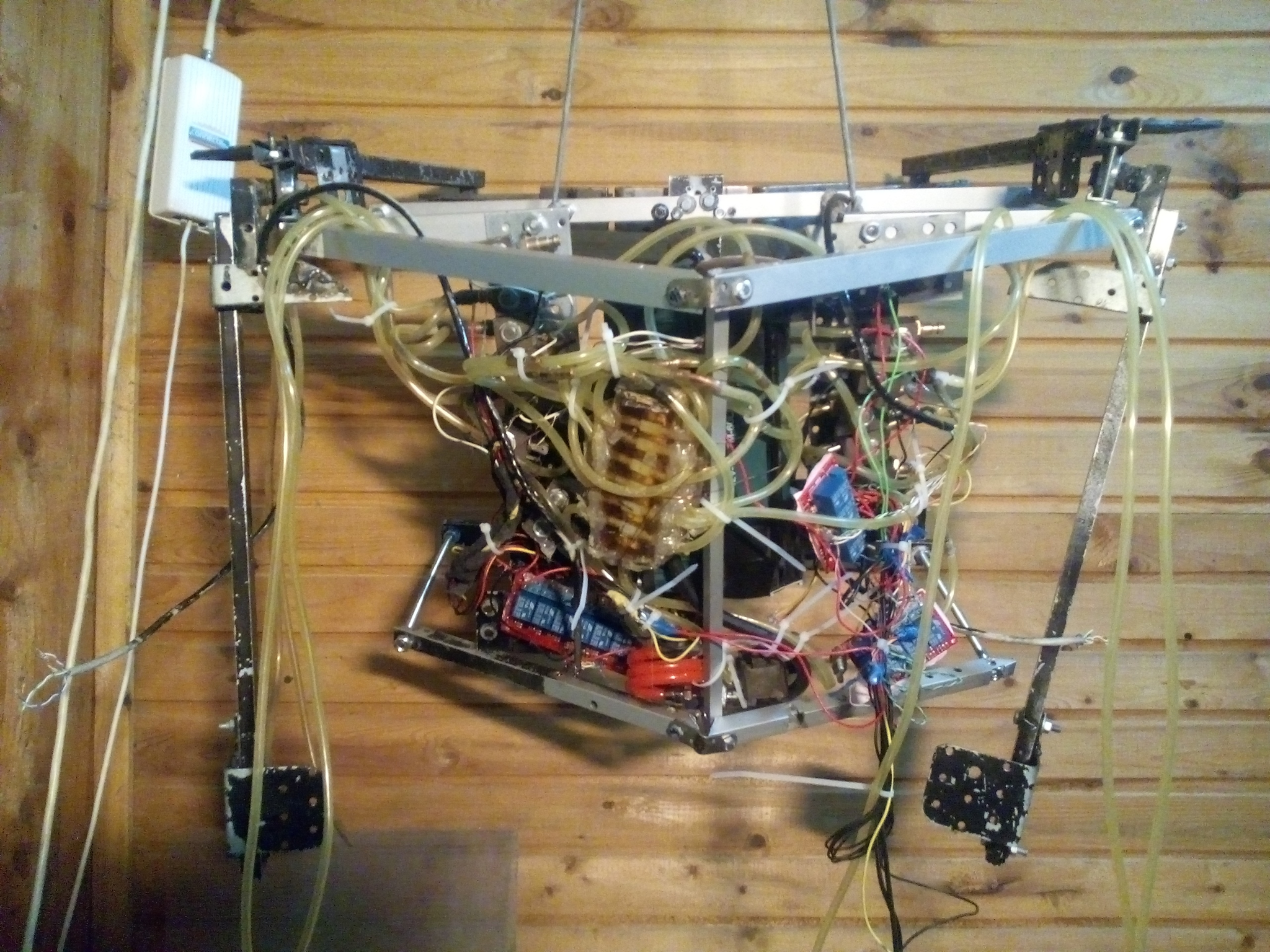
Постепенно силовая часть обрастала всё большим количеством клапанов. Тут уже можно увидеть 10 клапанов и распределитель. Вся подводка воздуха была реализована обычной акриловой трубкой 5 мм.

Синий клапан сверху нужен для аварийного спуска воздуха. Он нормально- открытый, то есть закрывается только при подаче напряжения. Если же случился обрыв или же что то иное с питанием то через этот клапан будет спущен весь сжатый воздух экзоскелета.

Напрямую управлять клапанной системой не получится — слишком большой ток для микроконтроллеров. Для того чтобы всё же реализовать управление клапанами нужно ввести промежуточное звено- релейный модули. На фото ниже это красные схемы с синими кубиками.

Спереди лучше видно сколько там проводов. От каждого клапана идет по 2 провода к реле. От реле тоже идет целый пучок проводов, но уже к контроллеру.

Далее всё это вжимается в грудину. Тут уже всё смонтировано и видны заделы для рук. Они сделаны по фордоской концепции. Сзади руки крепятся на очень мощные петли.

Трубки свисающие вниз должны идти к приводам.

В качестве осей вращения для рук использовались очень мощные подшипники. Он зажимались между двумя кусками профиля шпилькой и перетягивались, до момент изгиба профиля по форме подшипника.
На фото ниже можно уже увидеть верх с руками. Тут руки сделаны до локтей. На пластинах будут прикреплены пневмомускулы.
Вот так выглядел каркас руки зажимы подшипников.

Руки должны быть всегда отведены назад. Это дает пространство для движений руками вперед и добавляет линейную составляющую к кинематики, вместо только вращательных на каких то осях.

Собственно сами пневмомускулы. Про их сборку можно прочитать в другой статье
Их длина и другие параметры подбираются в зависимости от того что нам нужно в результате. Тут были мышцы по 50 см, то есть петли по 1 метру.

Крепятся мускулы на пластины через обычные зажимы для тросов. При этом мышцы ещё немного прижимаются к каркасу гофрированной трубой.
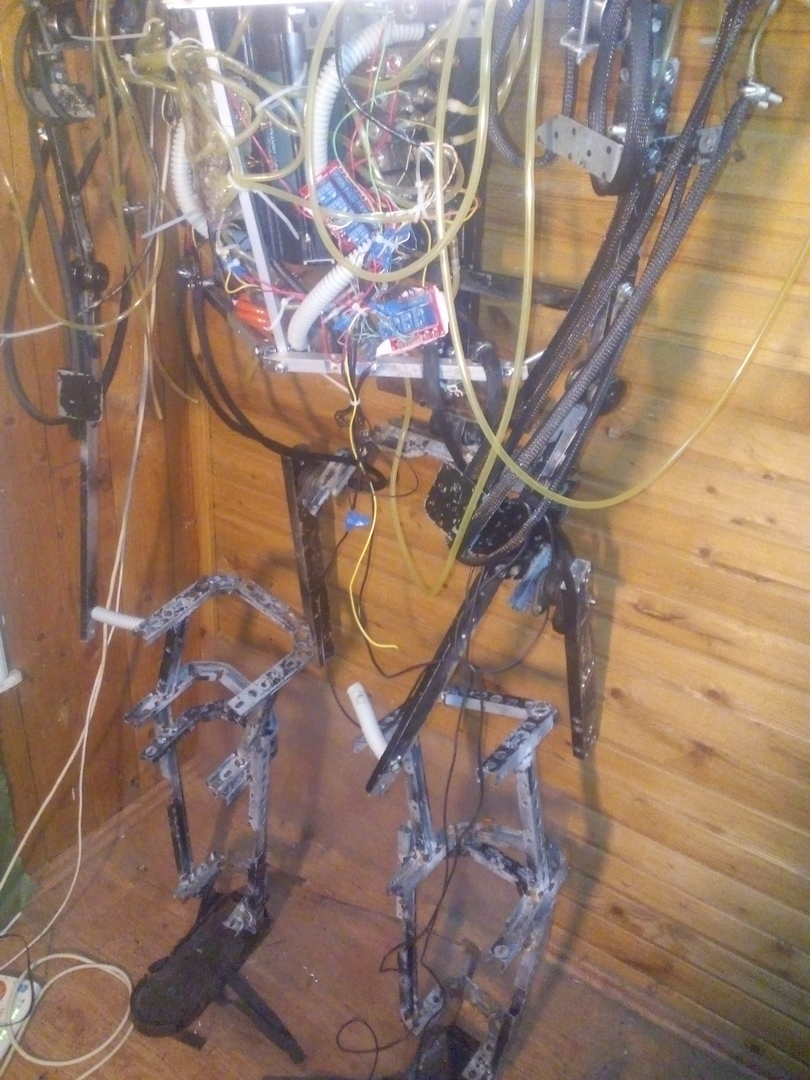
Где то на этой стадии разводка пневмопроводов и электроники была завершена и можно было хоть что то уже проверять. Ноги, как можно увидеть, только пока начали обрастать необходимыми компонентами и даже не могли удержать скелет стоя. В качестве бедер там использовались пальцевые шарниры от машины. Они очень мощные и неплохо подходят для таких тяжелый скелетов. Для лёгких же или средних это не самый хороший вариант.
За сим я завершу первую часть. Вторая часть будет позже. Спасибо за внимание.
Не забываем что есть группы и дискорд, где можно прочитать про подобное или же задать вопрос.
Лига Биоников
112 постов709 подписчиков
Правила сообщества
Стандартные правила
Оскорбления, провокации, токсичное общение, слишком частый флуд, наезды, жирный троллинг - выдаем 2 предупреждения, на третий раз бан.