Всем привет!
Сегодня поговорим, о таком замечательном и невероятно доставляющем офигенные ощущения процессе как - Манёвр перехвата и стыковка в Kerbal Space Program. Если вы умеете стыковаться не переходя в режим докинга, скорее всего этот пост не для вас. В посте я максимально просто и доступно постараюсь разложить самый легкий метод стыковки и уверяю вас, если вы ранее сами не стыковались, процесс доставит вам недюжее удовольствие (с 12 года играю, до сих пор нравится стыковаться)
Краткое содержание следующее:
- Строим две простеньких одинаковых ракеты которые запустим в космос на разные орбиты.
- Взлетаем
- Формируем точку перехвата (Рендеву)
- Стыкуемся
Выглядит достаточно просто, особенно если никогда в KSP не играли (но по факту это не совсем так) :)
Давайте по порядку.
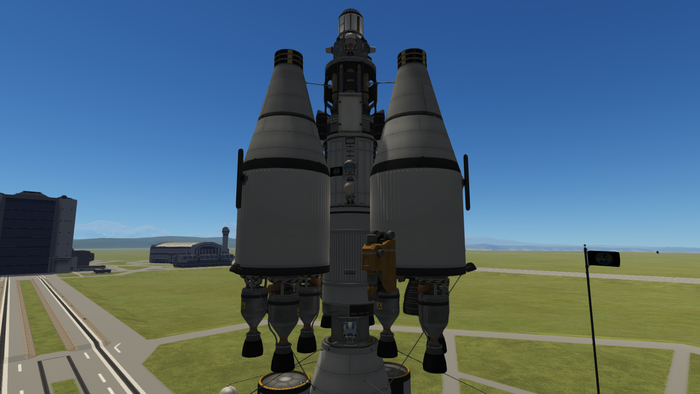
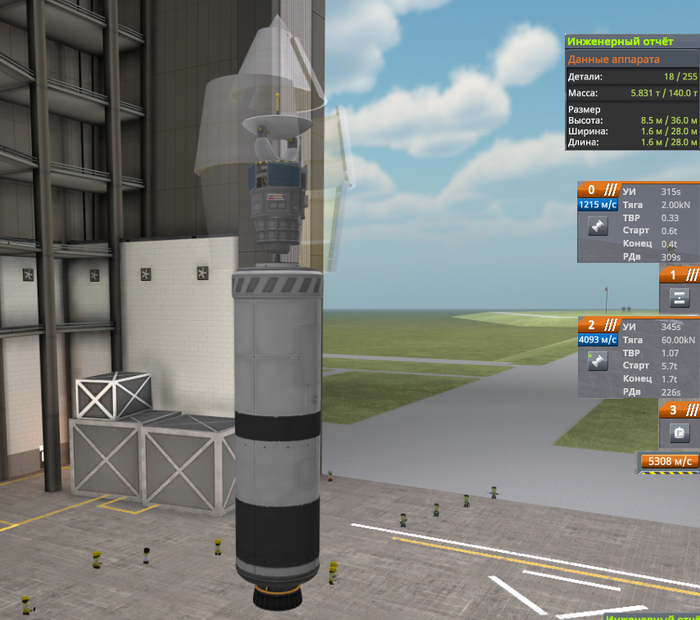
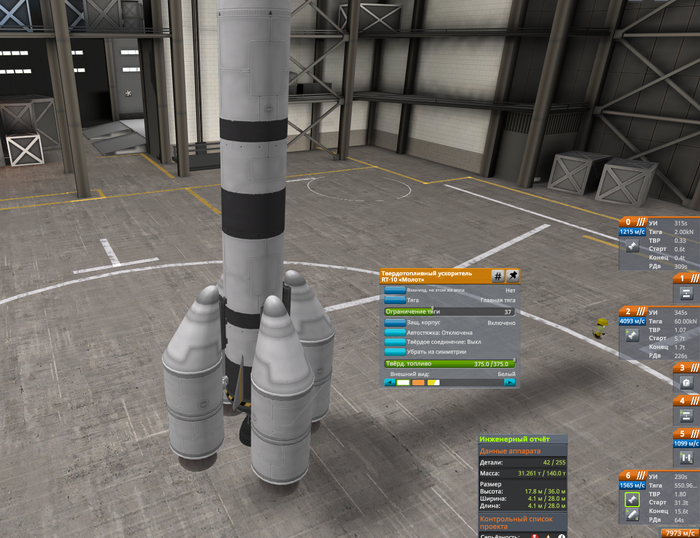
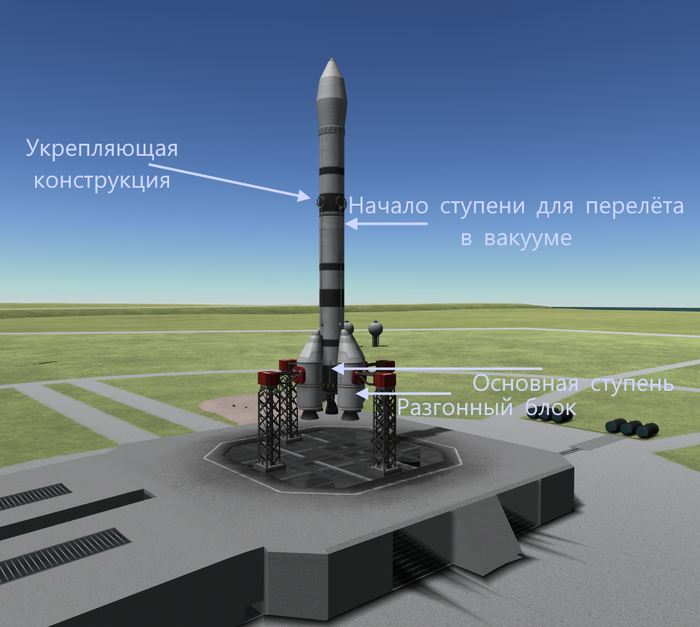
Аппарат:
Повторить его максимально просто.
Легкая посадочная рубка (у нее самый большой запас монотоплива из всех простых кабин), над ней гиродин и порт для стыковки средний.
Для обучения может понадобиться много монотоплива, поэтому поставьте несколько баков типа "ПЕЛЬМЕНЬ" или других. Забегая вперед скажу, что на стыковку мне потребовалось где-то 8-12 ед. монотоплива, но возьмите с запасом около 50-100.
Далее вниз ставим стандартный карандаш (бак на 4.5 т. веса) и полукарандаш (2.25 т.) далее вертлявый LVT 45.
Боковые ступени легче всего сделать из 1 карандаша и 1 вертлявого LVT 45. Размещать лучше всего на длинный вертикальный сепаратор (ТТ-70) по 2-ой (не 4-ой) симметрии и включать пропуск ресурсов. Смысл в том, что разместив по двойной симметрии и включив пропуск ресурсов, мы можем скопировать сепаратор со всеми прикрепленными к нему деталями и настройками (наводим на него мышкой - ALT + ЛКМ) и ставим еще раз с двойной симметрией под 90 градусов.
В этом случае, разделив парный отстрел боковушек на две ступени (ступень 1 и ступень 0 справа снизу) настройки перекачки топлива сформируются автоматически и ничего не надо будет трогать.
Все двигатели мы запускам разом удерживая адекватный ТВР тягой (1.8). Получится, что сначала все двигатели будут питаться из баков первых двух боковушек, а после отстрела, все двигатели будут есть из вторых двух боковушек, в этом случае, когда все 4 боковушки будут отстреляны, центральный бак останется полным и нетронутым, за счет чего дельта скорости будет хорошо распределена по ступеням. Раньше такие перекачки делались через жёлтые шланги в топливном разделе (можно сделать так и сейчас без включения пропуска ресурсов). С одной пары боковушек шланг из бака ставится в другую пару боковушек, а из второй пары боковушек в центральный бак, и всё будет абсолютно так же.
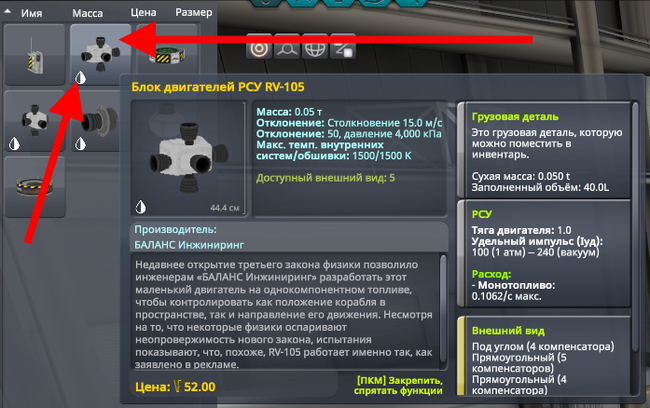
В качестве двигателей ориентации используем двигатель RV-105 (с переключением на второй вариант капелькой в левом нижнем углу - вариант с 5-ю соплами). С таким видом РСУ у вас будет меньше всего проблем, и в такой конфигурации можно обойтись всего 4-мя такими двигателями, но мы для простоты будем использовать 8 таких.
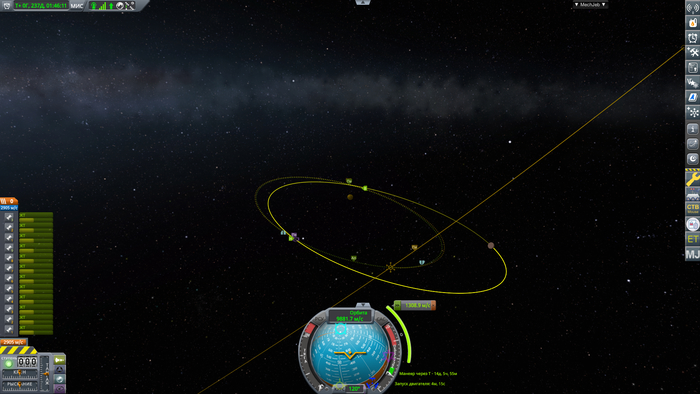
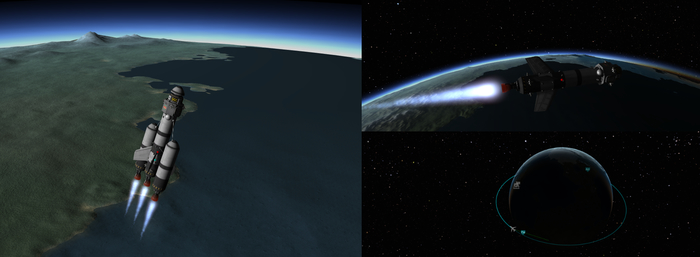
Касательно размещения РСУ (RSC). Размещать их следует равноудаленно от центра масс того, что вы собираетесь этими движками ориентировать и стыковать. Явно боковушки в космосе уже будет отстреляны, поэтому нам нужен центр масс последней ступени. На первом скриншоте, я пометил примерное место ЦМ красным крестом. Ставим двигатели на как можно более дальнем и одинаковом расстоянии от ЦМ с 4-ой симметрией.
Выводим 1 аппарат на околокруговую орбиту высотой +- 100 км.
2-ой аппарат выводим на орбиту с другой высотой +- 200 км
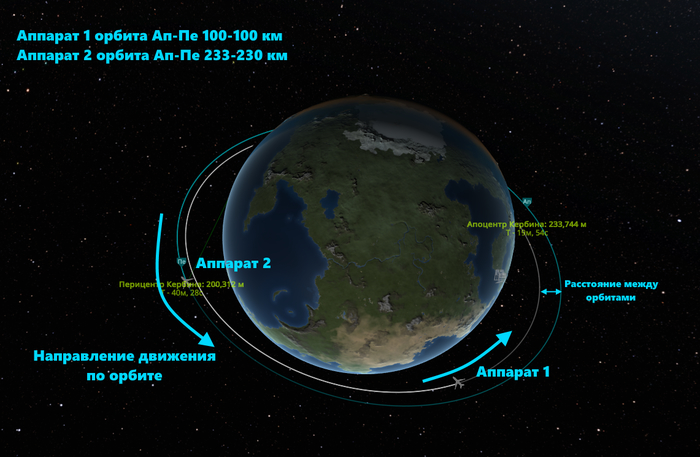
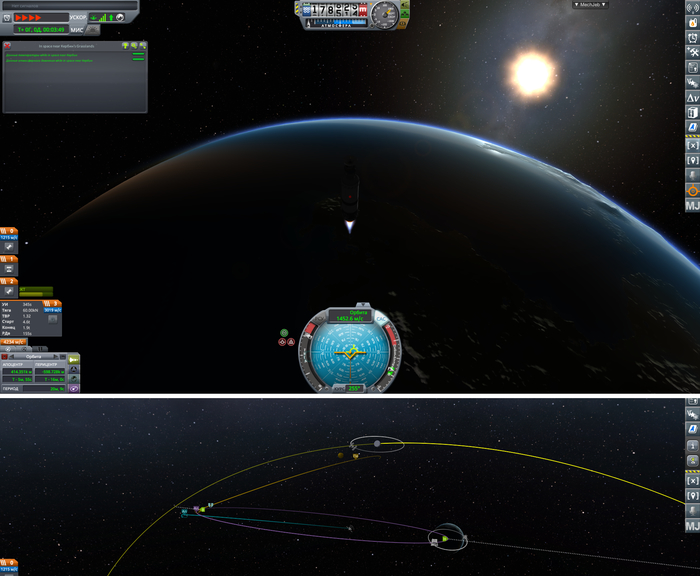
Получается следующая картинка:
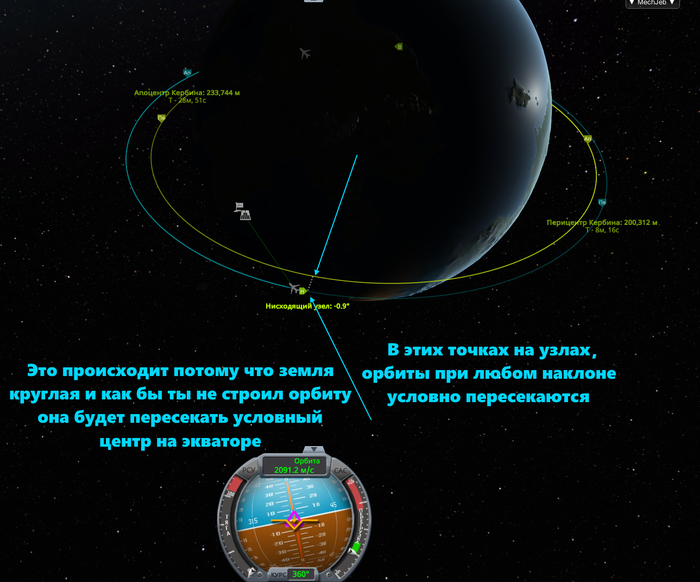
Далее необходимо понять достаточно фундаментальные зависимости и понятия. Космос огромный и встретиться просто так понятное дело - невозможно. Нам необходимо двум аппаратам подлететь друг к другу и замереть на месте. Т.е. необходимо чтобы орбита у обоих аппаратов была абсолютно одинаковой. Тогда возникает вопрос, зачем мы выводим два аппарата на разные высоты? Для понимания разберем небольшой пример:
Если мы запустим два аппарата со старта друг за другом к примеру с задержкой в несколько десятков минут и выведем на одинаковые орбиты, они будут вращаться вокруг земли с одинаковой скоростью, но на определенном расстоянии друг от друга (более 100 км) и не приближаться и не отдаляться друг от друга.
В этом случае возникает следующий вопрос.
Почему бы одному аппарату не ускориться и не догнать второй? А потому что сама орбита (эллипс с максимально удаленной от земли точкой (апогей Ап) и максимально близкой к земли точкой (перигей Пе)) напрямую связана со скоростью движения аппарата. Если мы меняем нашу скорость у нас изменяется траектория нашего движения вокруг земли, изменяется и апогей и перигей. Т.е. мы перестанем лететь по той же траектории, что летит второй аппарат из-за чего только улетим дальше от него.
Поэтому необходимо сделать манёвр перехвата. Вот что надо знать - чем ниже у нас орбита (чем ближе эллипс орбиты к земле) тем быстрее мы по ней летим, а чем выше у нас орбита, тем медленнее мы двигаемся. Исходя из этого, смотря на картинку сверху можно сделать вывод, что аппарат 1 двигается быстрее и совершает один оборот вокруг кербина за время меньшее чем аппарат 2. Исходя уже из этого можно сказать, что постепенно аппарат 1 (смотря на данную картинку) будет потихоньку догонять аппарат с обратной стороны. Будет всё ближе с каждым оборотом вокруг земли, и в определенный момент оба аппарата будет находиться на расстоянии равным расстоянию между их орбитами (отмечено на картинке).
По сути, чтобы построить маневр перехвата, нам нужно дождаться момента нужного оборота вокруг кербина, во время которого расстояние между объектами будет минимальное. Поняв что на текущем обороте вокруг кербина мы будем ближе всего, нам нужно скорректировать орбиту так, чтобы расстояние между орбитами в точке сближение было равно 0. В этом случае, в точке мы действительно встретимся с аппаратом на определенной дистанции, но за счет разных орбит у нас будет очень высокая скорость встречи, от несколько десятков метров в секунду до нескольких сотен.
Забавный факт, когда я начинал играть в KSP я подумал что будет довольно занятной идеей встретиться двум аппаратам если лететь по орбитам в две разные стороны (орбиты с 180 гр. отличия) я довольно серьёзно подошел к делу совместил точку перехвата до 200-300 метров и при встрече офигел, что поскольку аппараты летят в разные стороны, скорость пролёта мимо цели составляла несколько километров в секунду (помахал ручкой).
Чтобы минимизировать скорость встречи, необходимо сделать первый важный этап в маневре перехвата - совместить плоскости орбит. Т.е. сделать так, чтобы углы орбит 1го и 2го аппарата были одинаковые. Для этого мы на карте отмечаем целью второй аппарат. После чего видим два зеленых маркера. В и Н - восходящий и нисходящий узел
Далее мы выжидаем когда наш аппарат будет максимально близок к этому узлу и делаем прожиг в сторону - Нормали (если узел нисходящий) и Антинормали (если узел восходящий). Нормаль помечена на навиболе Фиолетовым трегуольником с точкой, а антинормаль другой схожей фиолетовой фигурой.
Прожигаем смотря прямо на карту и видим как узел постепенно приближается к 0. Для стыковки желательный угол не более 0,2 градусов, а лучше 0. Если угол будет больше, все равно можно совместить точки сближения, но скорость встречи мало того, что будет большой, так еще и будет изменяться каждую секунду за счет неточного угла.
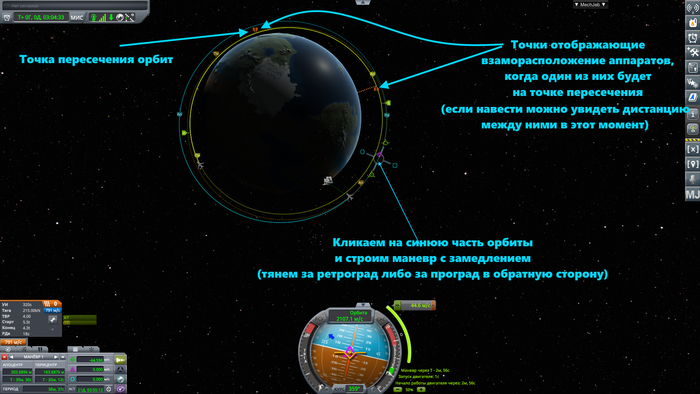
Далее мы можем либо просто подождать, как я писал выше круга, на котором мы будем ближе всего, либо заранее прикинуть маневр и дистанции. Точки пересечения будут видны после того как вы спланируете или выполните маневр.
Сам манёвр можно таскать за середину меняя время старта этого маневра (в нашем случае торможения (прожига на ретроград) т.к. мы будем тормозить с аппарата на внешней орбите, а не ускорятся с того что на внутренней. Таская манёвр мы будем видеть, что точки взаиморасположения аппаратов будем удаляться и сближаться, в зависимости от правильной и неправильной стороны в которые мы тянем манёвр.
Два варианта перехвата:
Вариант посложнее: Покрутиться на орбите и поподбирать маневр на ней таская его по времени старта, пока не удастся совместить точку встречи хотя бы в километрах 10-15. (Если всё сделать правильно то можно сразу свести до расстояния менее 1 км.)
Вариант полегче:
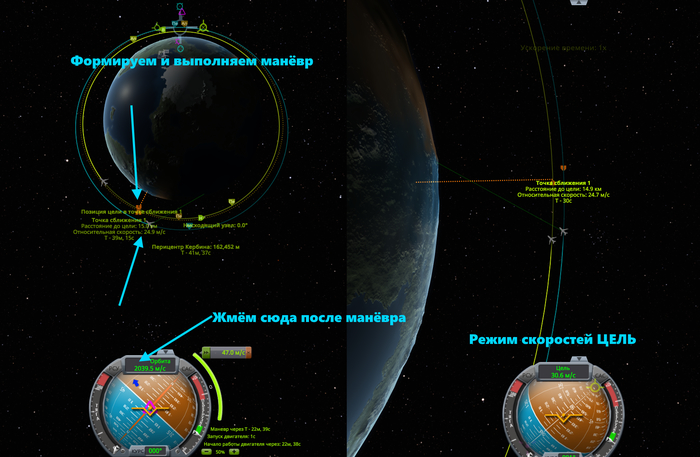
За счет этих инструментов и перемоток времени мы подгоняем точки пересечения орбит и делаем маневр (прожиг), чтобы сделать точку пересечения орбит и не смотрим как взаиморасполагаются аппараты.
После этого мы поймем, что каждый круг у нас дистанция между аппаратами в точке встречи будет сокращаться, либо удлиняться (если не повезет), но всё равно через определенное время начнет сокращаться. Просто ждем когда расстояние на встрече будет небольшим. Для кербина на высоте +- 100 км, считаю что 50 км, это максимальное расстояние, на котором можно пробовать делать сближения, иначе можно черпануть за верхние слои атмосферы и разбиться невнимательно выполняя следующие манёвры.
Что случилось если появились ещё и фиолетовые маркеры?
Это значит что вы сделали аппарату такую траекторию, что с орбитой второго аппарата она пересекается не в одной точке, а в двух и маркеры попарного цвета помогут так же сделать сближение в одной или другой точке или подогнать их манёвром. (В случае с двойным пересечением скорость встречи будет скорее всего выше)
Когда у нас есть дистанция менее 50 км между аппаратами всё сводится к простой работе с навиболом (шаром ориентации снизу). Переключаем его с режима орбита в режим ЦЕЛЬ.
В целом о том что творится на навиболе. Благодаря нему мы можем понимать в пространстве куда смотрит нос нашего аппарата, а так же в какую сторону мы летим. Это практически всё что нужно знать чтобы сделать последующий перехват. (Кстати если вдруг не замечали, оранжевая часть поверхности навибола значит что мы смотрим в планету, а синяя от неё)
Когда мы находимся в режиме ПОВЕРХНОСТЬ или ОРБИТА мы видим значком зеленого кружка и трёх линий то направление в которое направлен наш вектор движения, а такой же значок с перечеркнутым кружком показывает обратное направление - против движения. Когда мы выбираем небесное тело или аппарат целью, у нас появляются на навиболе еще 2 значка. Фиолетовый круг состоящий из 4 частей и точкой по середине и фиолетовая точка с тремя линиями под 120 градусов. Первый значок означает то направление в котором находится цель, а второй значок логичным образом располагается на обратной стороне навиболе и показывает обратное от цели направление.
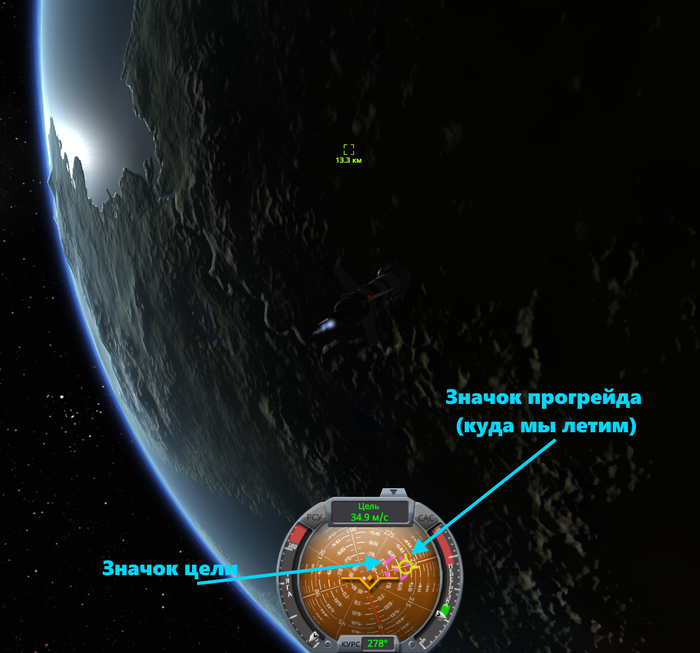
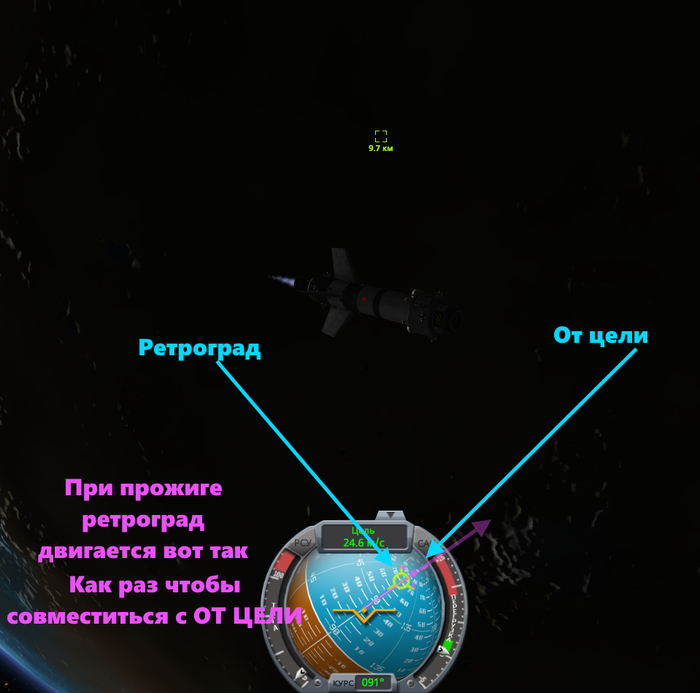
Когда мы переходим в режим навибола - ЦЕЛЬ, в графе со скоростью отображается НАША СКОРОСТЬ ОТНОСИТЕЛЬНО ЦЕЛИ. При этом у нас есть значок направления к ЦЕЛИ и значок ПРОГРЕЙДА (направление куда мы летим). Я думаю, что вы уже догадались, что используя один навибол, можно сделать прожиг так, чтобы ПРОГРЕЙД встал ровно на направление к цели и чем ближе мы к цели, тем более точно мы сможем с ней сближаться (Значок цели будет постоянно смещаться).
Из всего вышесказанного можно сделать вывод, что если значок прогрейда и значок направления цели будут видимы на одном экране навибола друг с другом вместе, то мы будем двигаться к цели (аналогично ретрогрейд и "от цели"), а если мы будем видеть значок "от цели" с прогрейдом либо "к цели" с ретрогрейдом - то отдаляемся.
Далее необходимо понять как это дело туда-сюда движется. Когда мы становимся в определенную точку как на картинке сверху и прожигаем топливо. Значок прогрейда тянется к нашей текущей позиции, а так же в текущей ситуации прогрейд тянется к точке "К ЦЕЛИ" и в этом случае скорость движения к цели увеличивается.
Естественно сделать это на глазок за раз сложно и не выйдет, поэтому следующим этапом, мы просто удерживаем прогрейд в сторону цели и перематываем время пока он не убегает с цели. Как вы можете заметить ускоряться сильно и до бесконечности не стоит, потому что мы просто резко пролетим мимо. Поэтому когда мы окажемся довольно близко (меньше 5 км). Тоже самое действие можно проделывать со значком РЕТРОГРАД и ОТ ЦЕЛИ. Только в этом случае при прожиге РЕТРОГРАД не тянется к нашему положению, а наоборот УБЕГАЕТ от него в другую сторону, а скорость относительно цели уменьшается. (Ретроград необходимо удерживать на значке ОТ ЦЕЛИ).
Данными манипуляциями и перемоткой времени сокращаем дистанцию до 50-100 метров. (Чем ближе находимся к аппарату, тем больше стараемся снижать скорость относительно цели чтобы не пролететь). Когда дистанция станет небольшой просто встаём на ретрогрейд в режиме навибола ЦЕЛЬ и гасим скорость до нуля.
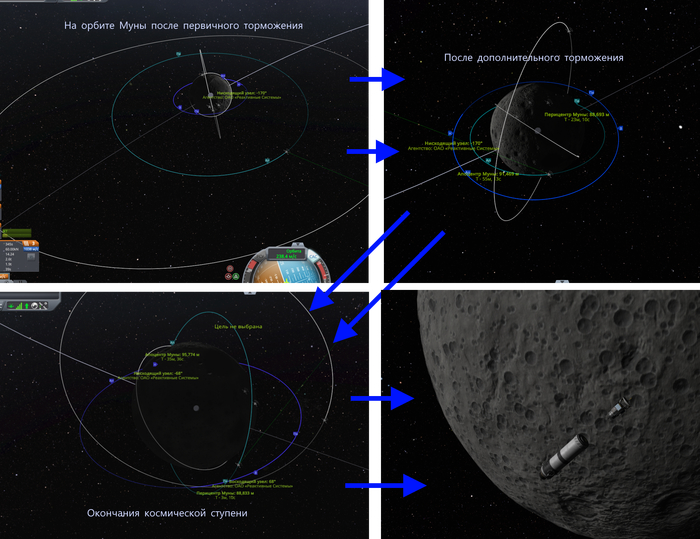
Поздравляю вы только что сделали манёвр перехвата. И кстати говоря, теперь вы можете перехватывать так любое небесное тело (луны, другие планеты).
Погасив же скорость до нуля мы будем спокойненько висеть рядом и практически не двигаться. Однако нужно понимать, что скорость на навиболе отображается с точностью до десятых частей, поэтому при перемотке времени мы всё равно будем слегка двигаться относительно второго аппарата.
Далее правой кнопкой мыши кликаем по порту которым хотим стыковаться на текущем аппарате - жмем УПРАВЛЯТЬ ОТСЮДА. Это перенесёт всё навибольные вещи именно на точку порта, что позволит более точно прицелиться для простой стыковки.
Кликаем правой кнопкой мыши по порту К КОТОРОМУ будем стыковаться - Задать цель.
Эти кнопки максимально правильно разместят на навиболе взаиморасполагающиеся маркеры К ЦЕЛИ и ОТ ЦЕЛИ, что позволит сразу же всё легко провернуть.
Далее вращаемся так, чтобы портом нацелиться на маркер К ЦЕЛИ (Нацеливаемся на порт)
Переходим на второй аппарат (горячая кнопка быстрого переключения "[" и "]" (на русской раскладке Х и Ъ) и делаем тоже самое (выставляемся на к ЦЕЛИ). Начинаем смотреть К ЦЕЛИ. В этом случае останется просто прожаться немного монотопливными двигателями и сделать небольшую скорость относительно двух целей (0.2-0.3 м/с) и удерживать цель и вектор движения.
Теперь как это сделать. Для начало разберем режим стыковки.
Режим стыковки включается снизу слева на второй значок сверху. После чего выползает вот такой вот экранчик как в левом углу, однако он по сути не сильно помогает.
Режим стыковки имеет 2 режима взаимодействия. ЛИН режим и ВРЩ. Переключаться между этими режимами можно горячей кнопкой ПРОБЕЛ - не бойтесь, в режиме стыковки ступени не срабатывают.
В режиме ВРЩ все наши кнопки работают как обычно на WASD и QE мы делаем Крен, Тангаж и Рысканье. В режиме ЛИН мы формируем смещения, т.е. при нажатии WASD мы смещаем аппарат как показано на рисунке ниже.
Обязательно включаем режим стабилизации (гор. клавиша T) без него после прожига РСУ мы будем мотаться как колбаса, если двигатели размещены не равноудаленно от центра масс.
В режиме ВРЩ мы ориентируемся, а в режиме ЛИН делаем смещения чтобы лететь куда надо используя кнопки. Расположение этого креста (WASD как на картинке выше, может быть развернуто относительно продольной оси аппарата (я нарисовал не совсем корректно где D на самом деле будет W и всё остальное так же сместиться на 90 гр, поскольку перед у аппарата где стекло у рубки с обратной стороны от текущего вида), поэтому можно сменить вид за которым летит камера на ФИКСИРОВАННЫЙ и понять всё будет намного проще (смена вида на гор. клавишу V).
По сути нам необходимо в режиме ЛИН включить на R РСУ и целясь в порт на навиболе немного нажать на Shift. Это датс нам небольшой импульс в сторону аппарата. После чего можно вернуться в режим ВРЩ и подгонять своё направление к порту (только желательно в режиме ВРЩ вырубать РСУ на R, чтобы неравномерным прожигом не сместить вектор движения) Если же при полете, мы видим, что наш прогрейд уходит от маркера К ЦЕЛИ, мы в режиме ЛИН с включенным R используем WASD чтобы разместить прогрейд на маркер к ЦЕЛИ. Чтобы легко застыковаться нужно иметь скорость 0.1-0.4 м/с. Когда вы будете рядом с портом, порт магнитом начнет притягиваться, и останется лишь в режиме ВРЩ правильно выставить аппарат, чтобы в точке соединения не было ПЕРЕЛОМА.
Если вы зашли с большой скоростью и после сцепки разлетелись - вставайтесь в режиме ВРЩ на прогрейд или ретрогрейд и используйте режим ЛИН, а так же SHIFT и CNTRL чтобы загасить скорость до нуля с помощью RSC. И снова потребуется либо развернуть оба аппарата друг к другу - лицом к лицу, либо же на РСУ сделать небольшой облёт, имея полученные знания и работая с навиболом и изображением.
Ваша первая стыковка принесет вам невиданное удовольствие и собирать корабли на орбите очень классно. Поэтому обязательно пробуйте и делитесь тем что у Вас получилось в комментах, а так же, не забывайте делать быстрое сохранение когда слетитесь близко, чтобы несколько раз иметь возможность попробовать постыковаться.
В дальнейшем разберу ситуацию как стыковаться не передними, а боковыми или максимально стрёмно расположенными портами и подобные вещи.
Пишите ваши вопросы и комментарии, присылайте что у вас вышло.
С Вами был Finn163. Спасибо за внимание.
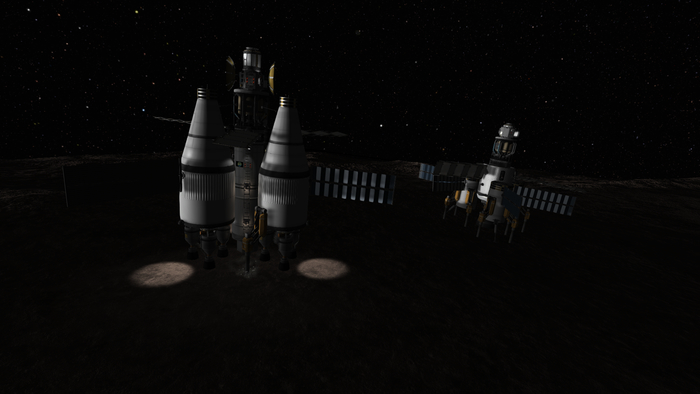
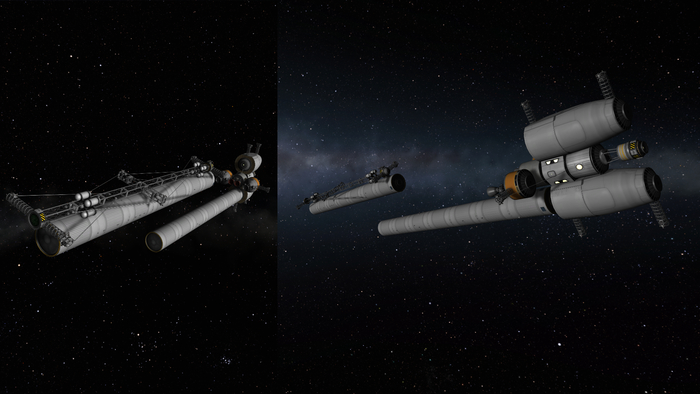
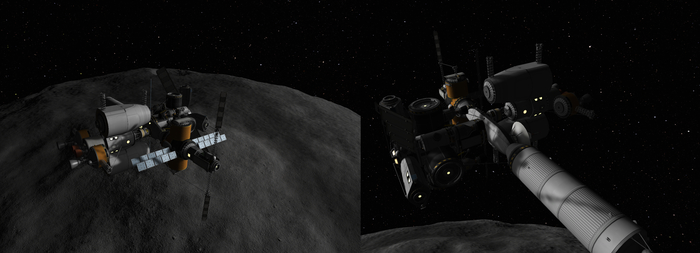
Небольшой бонус моя станция из прошлой карьеры на орбите Гилли (спутник Евы) весом в 170 тонн (гнал туда с кербина 4мя или 5ю партиями и стыковался на орбите), а так же подключение топливных стержней для тягача космопоезда одного из модулей станции.