

Когда ты зря согласился идти
Ссылка на оригинал озвучки #comment_293949927
Ссылка на оригинал озвучки #comment_293949927
Почти как финальные титры с Джеки Чаном
Наверное пасхалку спрятали, но не разглядеть(
Ссылка на видео https://youtube.com/shorts/v4vGGHeYtbg?feature=shares
Большей частью в выпендрёже и на этот раз в режиме подай-принеси на стройке, но прогресс данной платформы "Атлас" просто потрясающий.
В видео "из-за кулис" также много интересных технических моментов рассказывается. Да и робот спокойно бегущий с тяжёлой штангой в руках довольно внушает...
Анализ орбиты околоземного астероида 2022 UQ1 показал, что он является искусственным объектом. По всей видимости, это отработанный разгонный блок ракеты Atlas V, использовавшийся для запуска зонда Lucy.
Объект 2022 UQ1 был обнаружен 18 октября одним из автоматизированных телескопов системы ATLAS. Его классифицировали как околоземный астероид семейства Атонов. Диаметр тела был оценен в 10 км.
Однако достаточно быстро астрономы заподозрили, что 2022 UQ1 может иметь искусственное происхождение. На это указало то, что 2022 UQ1 совершил пролет Земли в тот же день, что и зонд Lucy. Более того, объект находился в окрестностях нашей планеты в тот же день, когда аппарат отправился в космос. Это говорит о том, что он представляет собой набравший вторую космическую скорость разгонный блок Centaur, который использовался для запуска Lucy. В результате, Центр малых планет исключил 2022 UQ1 из списка астероидов.
Это не первый случай, когда небесное тело, принятое за околоземный астероид, на самом деле оказывается сделано руками человека. Так, в свое время было доказано, что объект J002E3 является верней ступенью ракеты Saturn, использовавшейся для запуска миссии Apollo 14.
https://minorplanetcenter.net/mpec/K22/K22U79.html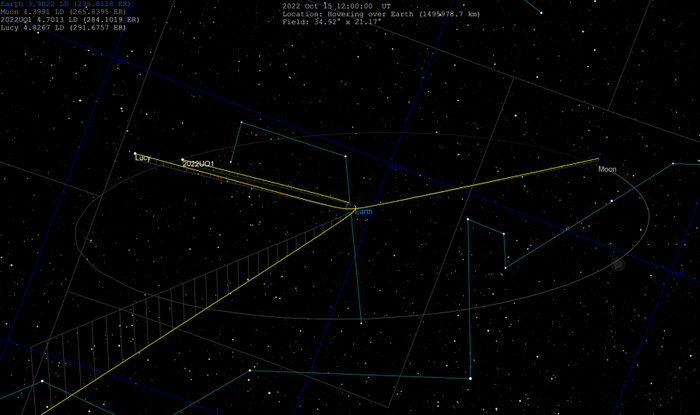

11 апреля компания Aerojet Rocketdyne объявила о получении заказа от United Launch Alliance (ULA ) на 116 двигателей для верхней ступени ракеты ULA Vulcan Centaur.
Крупная закупка ракетных двигателей последовала за объявлением Amazon от 5 апреля о том, что она выбрала Arianespace, Blue Origin и ULA для запуска до 3236 спутников для своей широкополосной группировки Project Kuiper.
На каждой верхней ступени Vulcan Centaur, преемницы уходящей на пенсию ULA Atlas 5, будет установлено два двигателя RL10C-X.
ЖРД жидкий водород/ жидкий кислород RL10C-X — это современный вариант серийно выпускаемого во многих модификациях много лет двигателя RL10, разработанный для Vulcan Centaur, который «увеличит использование аддитивного производства и представит другие передовые технологии для повышения качества, надежности, доступности и производительности».
RL10C-X использует главный инжектор и основную камеру сгорания, напечатанные на 3D-принтере, а также имеет 94-дюймовое монолитное легкое композитное сопло. По данным Aerojet, удельный импульс двигателя RL10C-X составляет 461 секунду.
Двигатель производится на заводе Aerojet Rocketdyne недалеко от Уэст-Палм-Бич, Флорида. RL10 также используется в верхней ступени ракеты носителя SLS.
В первой ступени ракеты Vulcan Centaur будут использоваться ЖРД жидкий водород/ жидкий кислород BE-4 производства Blue Origin, а Northrop Grumman занимается производством твердотопливных ускорителей.
Надо заметить, что RL10 был первым водородно кислородным ЖРД, пошедшим в серию в США еще во времена Сатурн-1, и использовался в разгонных блоках многих американских ракет носителей (Atlas, Saturn I, Titan IIIE, Titan IV, Delta III, Delta IV). Претерпев за свою 60 летнюю (!) историю полетов много модификаций и модернизаций.
Финансируемая NASA сеть телескопов теперь покрывает оба полушария Земли, круглосуточно следя за околоземными объектами в ночном небе.
Инженеры устанавливают телескоп системы ATLAS в обсерватории Эль Са́усе. Фото: El Sauce Observatory.
История системы предупреждения о столкновениях с астероидами ATLAS началась в 2013 году с гранта от NASA по программе Near-Earth Objects Observations, полученного Институтом астрономии Гавайского университета. Первые два телескопа были сооружены на территории архипелага и начали работу в 2017-м. После нескольких лет успешной эксплуатации было решено расширить систему двумя инструментами в южном полушарии – одним в Южноафриканской астрономической обсерватории и одним в обсерватории Эль Са́усе, что находится в Чили.
Каждый из этих телескопов способен запечатлеть на одном снимке участок неба в 100 раз крупнее полной луны. Присутствие в обоих полушариях позволяет ATLAS непрерывно вести наблюдение за всем ночным небом.
Важной частью планетарной защиты является обнаружение астероидов задолго до того, как они доберутся до нас – чтобы, если необходимо, мы смогли вовремя отреагировать. Со вводом этих двух телескопов в эксплуатацию, ATLAS сможет сканировать всё ночное небо каждые 24 часа, что чрезвычайно важно для инициативы NASA по поиску, отслеживанию и мониторингу околоземных объектов.
Келли Фаст, руководительница программы NASA по наблюдению за околоземными объектами (Near-Earth Object Observations Program)
На сегодня благодаря ATLAS было открыто более 700 околоземных астероидов и 66 комет, а также 2019 MO и 2018 LA – два небольших (около трёх метров в диаметре) астероида, столкнувшихся с Землёй. 22 января свой первый объект открыл новый телескоп ATLAS-Sutherland в Южной Африке – им оказался не представляющий угрозы для нашей планеты 100-метровый астероид 2022 BK. Система спроектирована специально для отслеживания объектов на очень малом расстоянии от Земли – ближе Луны, то есть до 384000 километров.
Монтаж оборудования для телескопа системы ATLAS на территории Южноафриканской астрономической обсерватории. Фото: Willie Koorts | SAAO
Однако ATLAS – не всё, что есть в арсенале у NASA для борьбы с угрозами из космоса. 24 ноября 2021 года на ракете Falcon 9 с территории базы Космических сил США «Ванденберг» была запущена миссия DART – первое полномасштабное испытание технологий планетарной защиты. Её цель – изменить скорость астероида под названием «Диморф» (не представляющего опасности для нашей планеты) настолько, чтобы смену его траектории можно было засечь с Земли.
Помимо этого, в разработке находится космический телескоп NEO Surveyor. Работая в инфракрасном диапазоне, он сможет обнаруживать потенциально опасные объекты с расстояния в более чем 40 миллионов километров; также аппарат поможет NASA не ограничиваться наблюдениями только за ночным небом. Сейчас проект ожидает разрешения на переход в стадию предварительного проектирования.
Пока мы не обнаружили какой-либо серьезной угрозы столкновения с астероидами, но продолжаем поиски – и уверены, что многие ещё предстоит найти. Наша цель – прогнозировать любую возможную угрозу на годы или десятилетия вперед, чтобы её можно было отразить с помощью уже имеющихся у нас технологий, таких как DART. DART, NEO Surveyor и ATLAS – важные элементы программы NASA по предотвращению столкновения Земли с астероидами.
Линдли Джонсон, глава Координационного департамента планетарной защиты NASA
Источник: NASA
https://www.nasa.gov/feature/nasa-asteroid-tracking-system-n...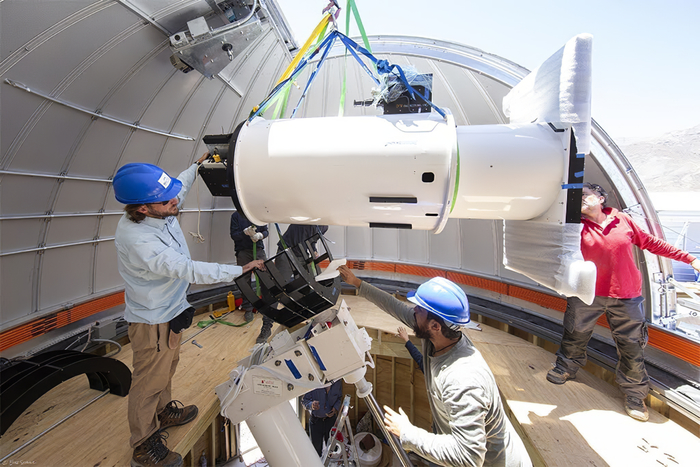

Свободный перевод интервью с Пэтом Мэрионом, ведущим разработчиком программного обеспечения для сенсорных систем Атласа.
Разработчики Атласа используют паркур для быстрого создания поведения, динамического движения, и связи между восприятием и системами управления, что позволяет роботу в буквальном смысле адаптироваться на лету.
Алгоритмы восприятия робота преобразуют данные сесноров в формат, пригодный для принятия решений и планирования физических действий. Атлас использует инерционные сенсоры, сенсоры положения моторов, сенсоры силы для управления движением и удержания равновесия тела.
Атлас использует time-of-flight камеру с сенсором расстояния для создания облака точек с частотой 15 кадров в секунду. Облако точек (point cloud) - это большая коллекция измеренных растояний. С помощью алгоритма многоплоскостной сегментации Атлас извлекат из облака точек отдельные поверхности, из которых в свою очередь строятся модели окружающих объектов.
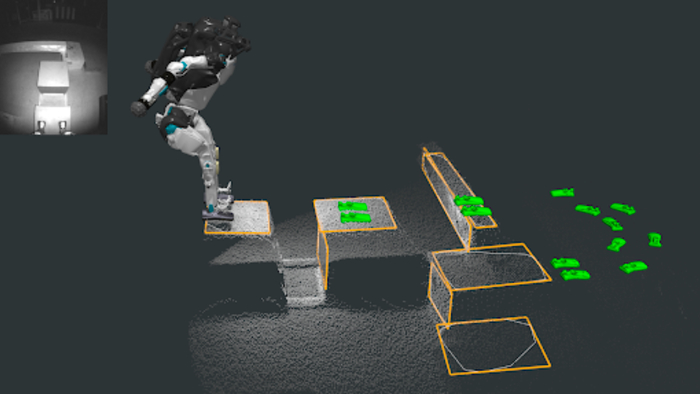
Слева вверху на рисунке показано, что видит инфракрасная камера робота. Оранжевыми прямоугольниками обозначены поверхности, которые Атлас смог распознать. Эти поверхности используются для планирования будущих действий, и зеленым цветом показано, куда робот планирует ставить ступни ног.
Робот получает высокоуровневую карту, показывающую, куда он должен двигаться и какие трюки он должен исполнить по пути. Эта карта является приблизительной, она не соответствует в точности построенной дорожке с препятствиями. Атлас использует эту карту для бега, при этом заполняя пробелы данными сенсоров. например, Атлас знает, что должен запрыгнуть на коробку. Если подвинуть коробку на полметра в сторону, Атлас все равно найдет и запрыгнет на нее. Если отодвинуть коробку слишком далеко, система не сможет ее найти и робот остановится.
Каждое движение, которое производит Атлас, получено из библиотеки шаблонов, подготовленных заранее с помощью оптимизации траекторий. Благодаря этому мы можем обучать робота новым движениям, добавляя новые траектории в библиотеку. Получая от системы восприятия запланированную цель для движения, робот выбирает из библиотеки шаблон, наиболее близкий к требуемому движению.
Разработка элементов поведения позволяет инженерам Boston Dynamics испытать пределы возможностей робота в симуляции, а также уменьшает количество вычислений, которые должен выполнять робот во время движения.
Для непосредственного выполнения движений робот использует так называемое управление с прогнозирующими моделями (model predictive control, MPC), т.е. модель динамики робота используется для предсказания того, как движения робота будут развиваться со временем. Контроллер постоянно решает задачу оптимизации для нахождения оптимального движения.
Шаблоны, сохраненные в библиотеке, являются примерами "хороших" решений. Контроллер адаптирует силы, положения частей тела, время исполнения движений, чтобы учесть факторы окружения: разницу в геометрии, проскальзывания конечностей и другие факторы, возникающие во время движения. Прыжок с платформы высотой 52 см принципиально не отличается от прыжка с платформы высотой 40 см, и MPC контроллер робота успешно решает подобные задачи.
Поскольку контроллер прогнозирует будущее, он может создавать плавные переходы от одного движения к другому. Это также облегчает создание библиотеки движений, поскольку инженерам не приходится рассматривать комбинации различных движений, которые могут следовать друг за другом. Разумеется, MPC контроллер не всесилен, и нам приходится искать компромис между сложностью контроллера и размером библиотеки шаблонов траекторий.
Работа над паркуром позволила получить глубокое понимание того, как можно создавать и управлять широким спектром динамических движений Атласа. Что еще более важно, это позволило создать расширяемую программную систему, которая будет расти и развиваться, давая Атласу новые возможности для восприятия и взаимодействия с его окружением.
Взять с собой побольше вкусняшек, запасное колесо и знак аварийной остановки. А что сделать еще — посмотрите в нашем чек-листе. Бонусом — маршруты для отдыха, которые можно проехать даже в плохую погоду.





