

CNC Shield - A4988 & TMC2209 - Arduino / ArduBlock
Показать полностью
1
1
Добрый день! Вновь прошу помощи у понимающих)
Пересобрал чпу фрезер, начал отладку, все концевики отрабатывали. Была прошивка GRBL 0.9j, решил перепрошить на версию 1.1, чтобы была возможность подключаться телефоном через андроид приложение "GRBL controller". После перепрошивки, при перемещении в позицию "Home", станок перестал реагировать на концевик (пока речь про концевик на оси Z, т.к. при перемещении сначала ищет только по это оси) и перемещается до физического упора. В этом, собственно, у меня и проблема.
Прозвонил кончевик и провод до платы - всё ок. Перепрошил обратно на версию 0.9. Поменял плату ардуино, была в наличии. Купил новую плату shield. Ничего не поменялось.
Наводки на проводку концевиков исключил, т.к. изначально была наводка и в том случае получались ложные срабатывания концевиков, а тут наоборот - не отрабатывает.
Установлено 3 концевика, подключил к свободными пинам оси Z кнопку, при нажатии (во время перемещения в "Home") нет реакции.
Все настройки прописывал какие были изначально, перед первой перепрошивкой. Использовал разные программы (UniversalGcodeSender, grblControl и мобильную GRBL controller) и два разных ПК, с 10 и 11 виндой.
Концевики - NO, обычные механические микрики.
Настройки:
$0=10 (step pulse, usec)
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=3 (dir port invert mask:00000011)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=1 (status report mask:00000001)
$11=0.020 (junction deviation, mm)
$12=0.002 (arc tolerance, mm)
$13=0 (report inches, bool)
$14=1 (auto start, bool)
$20=0 (soft limits, bool)
$21=0 (hard limits, bool)
$22=1 (homing cycle, bool)
$23=3 (homing dir invert mask:00000011)
$24=25.000 (homing feed, mm/min)
$25=300.000 (homing seek, mm/min)
$26=250 (homing debounce, msec)
$27=3.000 (homing pull-off, mm)
$100=2133.280 (x, step/mm)
$101=2133.280 (y, step/mm)
$102=2133.280 (z, step/mm)
$110=700.000 (x max rate, mm/min)
$111=700.000 (y max rate, mm/min)
$112=500.000 (z max rate, mm/min)
$120=50.000 (x accel, mm/sec^2)
$121=50.000 (y accel, mm/sec^2)
$122=30.000 (z accel, mm/sec^2)
$130=200.000 (x max travel, mm)
$131=200.000 (y max travel, mm)
$132=200.000 (z max travel, mm)
Буду благодарен за идеи.
Проблема решена: Как и предполагали некоторые люди, в прошивке были заменены местами пины - Z+ поменяли местами с Spn_En.
Всем спасибо!
Мы постарались сделать каждый город, с которого начинается еженедельный заед в нашей новой игре, по-настоящему уникальным. Оценить можно на странице совместной игры Torero и Пикабу.
Реклама АО «Кордиант», ИНН 7601001509
Команды, всем доброго дня. Хотелось бы услышать мнение людей в теме мелкой механизации и ЧПУ. Спасибо за советы)
Сейчас вынашиваю в голове план по автоматизации некоторых процессов на своем мелком производстве. А именно машины для нарезания строп. Общий вид уже сформировался, как реализовать те или иные этапы тоже, Как собрать механическую часть у меня вопросов нет. Вопрос только в управлении шаговыми двигателями, реле и датчиками. И ничего кроме ардуино в голову не приходит. А точнее сказать я аналогов то и не знаю. Как я вижу реализацию. Сенсорный дисплей. Выбираешь длину, количество. Зеленая кнопка сделать всё хорошо. Ардуинка проверяет первый датчик, крутит первый мотор на н шагов, крутит второй, включает реле, крутит опять первый, записывает сколько циклов сделано. Так вот вопрос. На чем кроме ардуино реализуют такие вещи? В чем минусы или плюсы?
Для изготовления коллекторов отопления и водоснабжения необходимо приваривать резьбы и муфты (мы их называем "отводы") к телу коллектора, трубе бОльшего радиуса. Для обеспечения автоматизированной приварки есть два подхода - вырезать отверстие в теле коллектора, и вставлять туда резьбу или муфту на нужную глубину.

Это влечет за собой повышенное сопротивление в трубе, когда через нее течет вода.
Второй подход - это выбрать радиус трубы фрезой или шлифовальной лентой, чтобы обеспечить установку на трубе вплотную.
Мы решили для себя идти по второму пути, и купили шлифовальный станок Fein Grit GX75

с шлифовальным модулем Fein GRIT GXR.

Тот результат, который мы получили нас устроил по качеству - но не устроил по производительности труда. Поэтому мы поставили себе задачу - сделать оснастку модуля шлифования, так, чтобы он работал автоматически.
Мы поставили себе задачу так- должно быть возможно:
- регулировать ширину ленты
- для равномерного износа ленты надо использовать всю ширину ленты
- регулировать глубину проточки
- автоматически менять деталь после проточки
- устанавливать количество деталей для проточки (чтобы не считать вручную)
Мы сделали такую оснастку, и ее работа показана на видео. Контроллер - Arduino. Перемещение по двум осям - шаговые двигатели. Пневматика для механизма смены деталей - Camozzi.
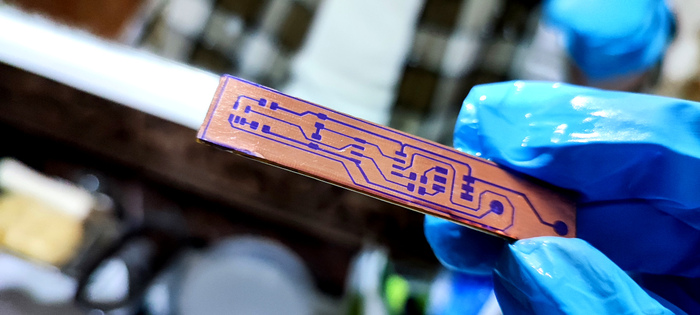
В общем история проста, приобрёл гравёр с Али sculpfun s9, на первый взгляд все было отлично, но при гравировке изображений, резке более 10 минут и просто по желанию китайского рандома станок встаёт на месте, в консоли lightburn пишет: �ok�ok� и подобные вариации, при этом реакция только на кнопку стоп. Lasergrbl пишет про переполнение памяти(на сколько помню) но даёт возможность пропустить ошибку.
Пробовал накатывать новый grbl, менять ОС, комп, кабель, но результата нет.
Может есть ещё какие-то соображения на эту тему?
Используется плата XY DLC V1.1 на atmega328pb.
К сожалению сижу на iOS и Пикабу не даёт выложить фото
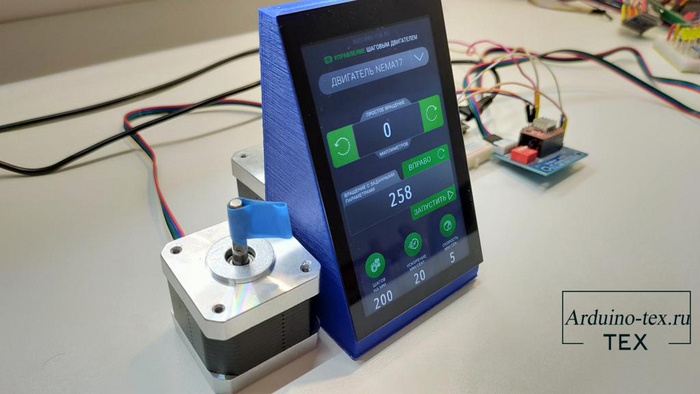
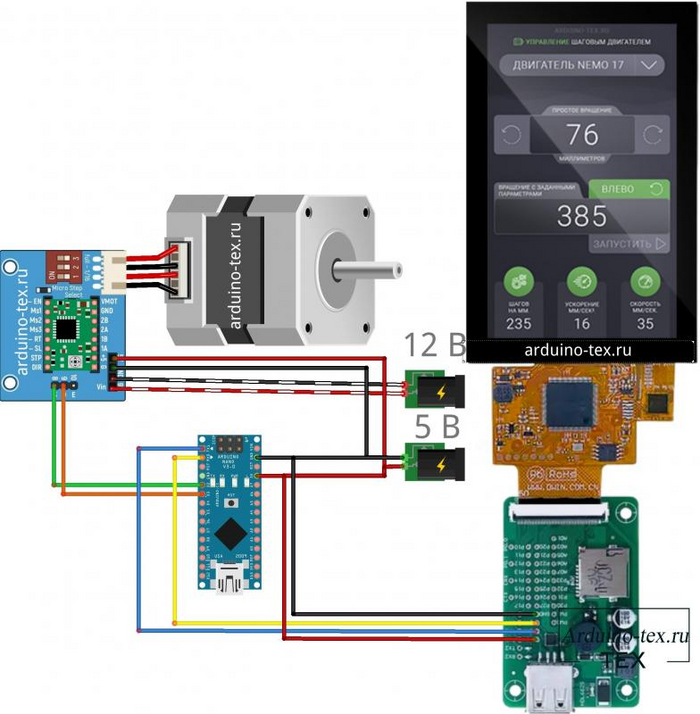
Для реализации проектов, где требуется точное перемещение, используются сервоприводы и шаговые двигатели. Сегодня рассмотрим, как можно сделать панель управления шаговым двигателем с использованием сенсорного дисплея DWIN.
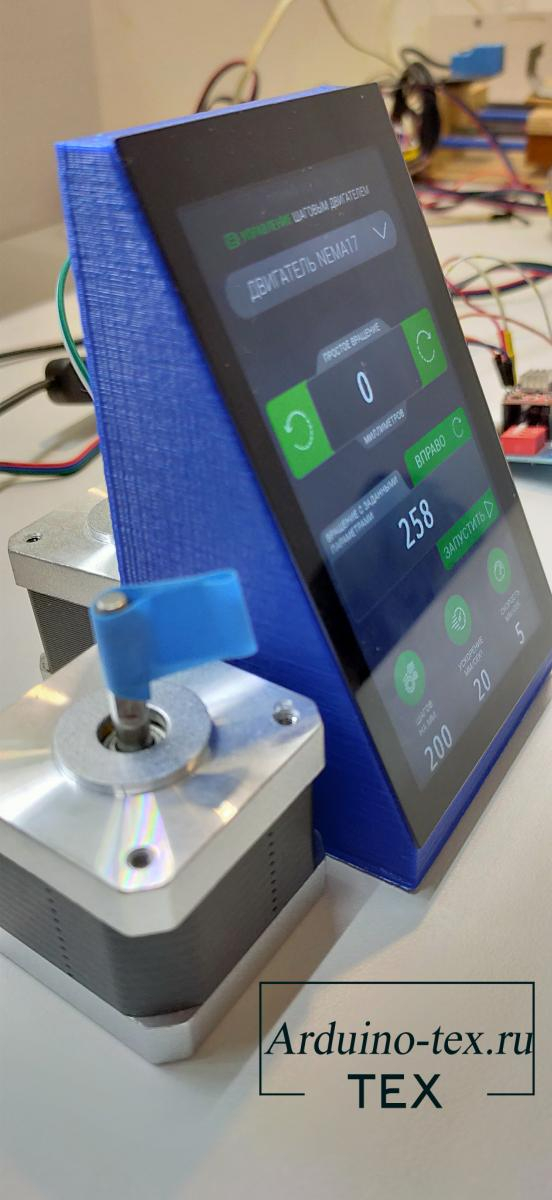
Распечатал корпус под дисплей COF от компании DWIN. В корпусе дисплей выглядит просто шикарно. Также в корпус можно установить драйвер шагового двигателя.
Купить дисплей DWIN можно со скидкой, для этого используйте купон ARDUINOTEX.
Скачать 3D модель для печати корпуса под дисплей можно на моём сайте.
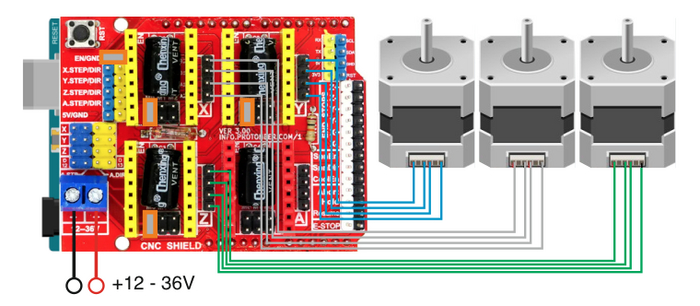
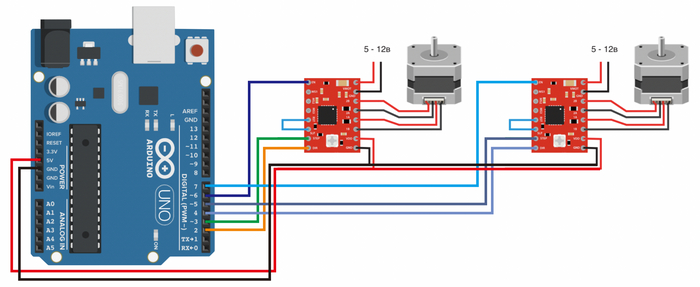
Схема подключения электроники.
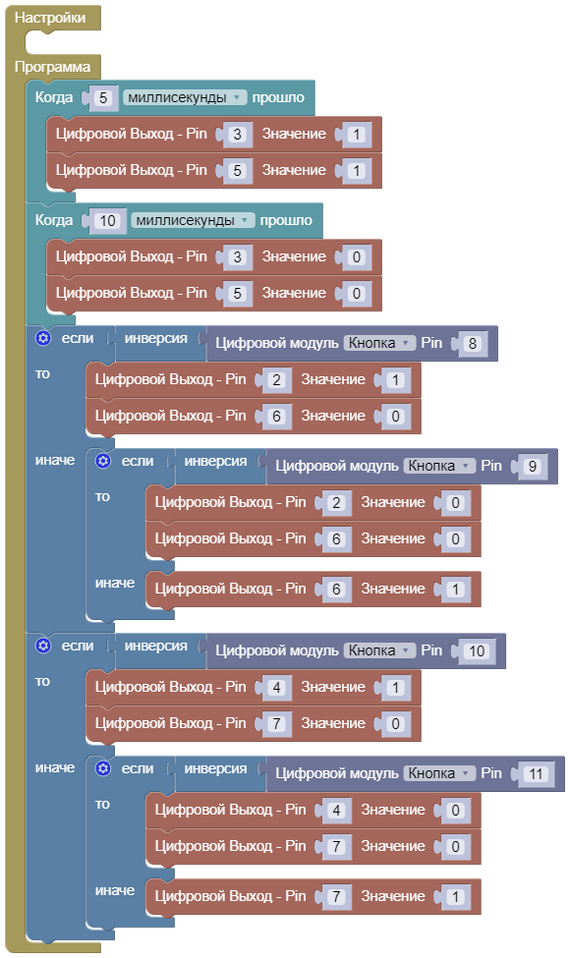
В коде менять ничего не нужно. Максимум проверить, чтобы был выключен режим отладки.
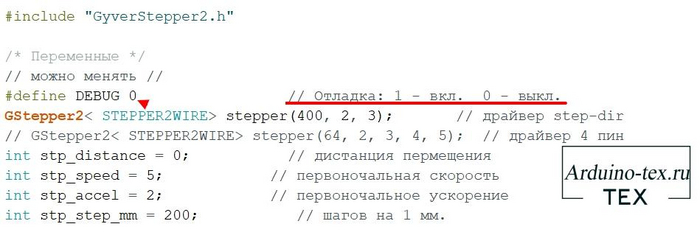
Все остальные настройки выполняются на панели управления.
Устанавливаем, сколько шагов нужно сделать двигателю, чтобы совершить перемещение на 1 мм. Например, если взять шпильку с метрической резьбой M5, то для перемещения на 1 мм нужно совершить 1 оборот двигателя. Если у нас нет деления шага, то для Nema 17 нужно выставить 200 шагов. Затем можно установить скорость и ускорение перемещения.

После чего можно приступить к управлению. Есть 2 варианта управления:
1. Вращать по часовой стрелке или против часовой стрелки без предварительного указания расстояния. Перемещение осуществляется, пока кнопка наводится в нажатом состоянии.
2. Выставить расстояние, на которое нужно переместиться, и направление перемещения. После нажатия на кнопку «Старт» двигатель совершит перемещение на заданное расстояние.
Скачать исходные материалы проекта вы можете на моём сайте.
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
Ну что, потренировались? А теперь пора браться за дело всерьез.