Стенобот поехал по стене!
Стенобот поехал по стене впервые.
Из-за недостаточного сцепления верхних колёс робота со стеной, происходит его уход вбок.
Необходимо сместить центр тяжести ближе к стене, над этой проблемой я уже работаю...
Стенобот поехал по стене впервые.
Из-за недостаточного сцепления верхних колёс робота со стеной, происходит его уход вбок.
Необходимо сместить центр тяжести ближе к стене, над этой проблемой я уже работаю...
Первые попытки (не совсем удачные) стенобота заехать на стену. А ведь он так хотел...
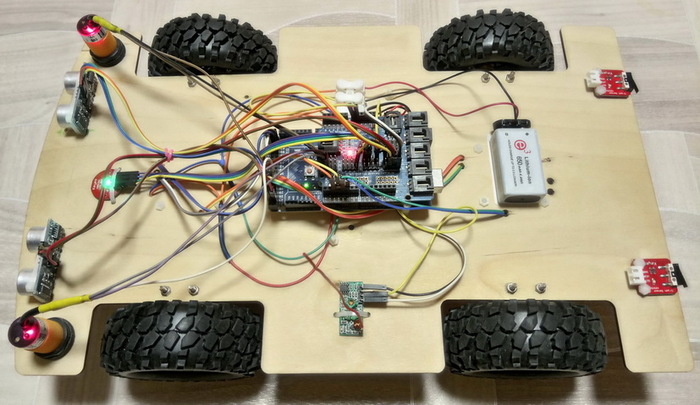
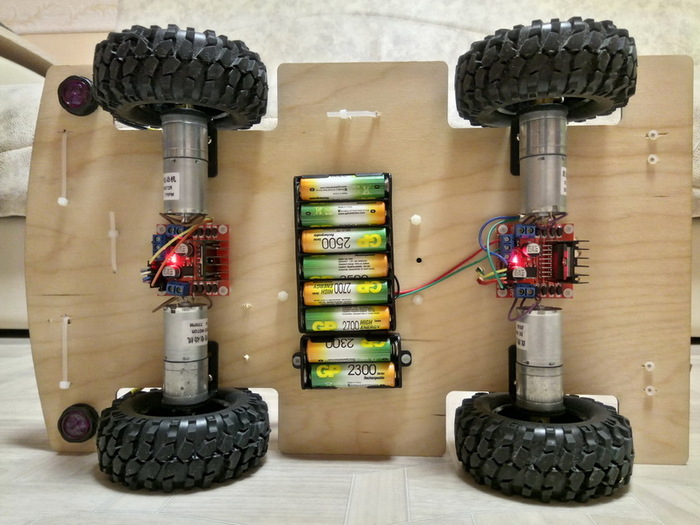
Робот представляет собой платформу с четырьмя колесами. Платформа вырезана лазером по моим чертежам.
Каждое колесо приводится в движение редуктором с мотором.
Для управления колесным роботом используется Ардуино Мега.
Существуют три режима работы робота: радиоуправление, самостоятельное движение и откат по памяти назад.
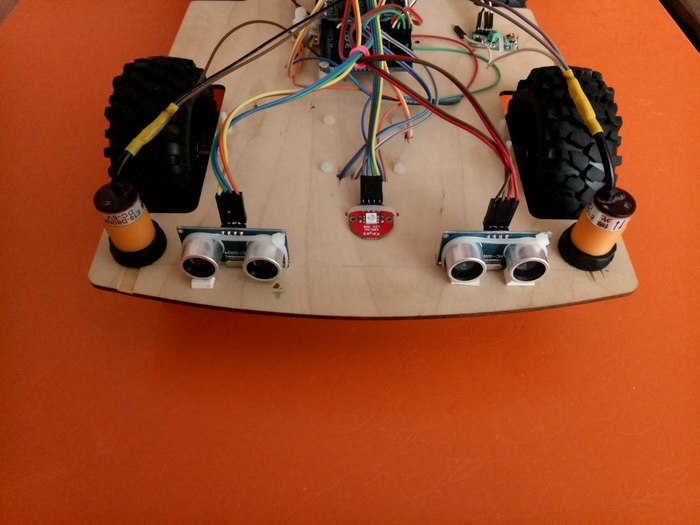
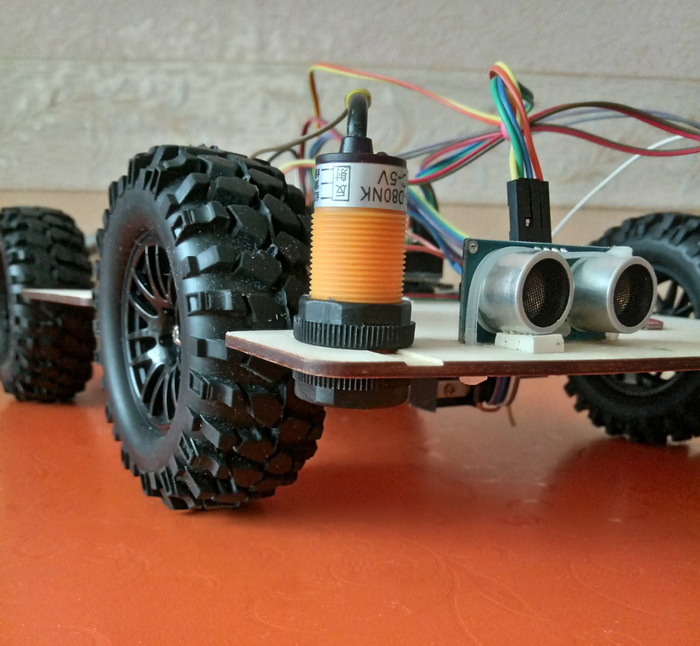
Используемые датчики: ультразвуковые, инфракрасные.
Для индикации текущего режима работы используется полноцветный LED. В режиме радиоуправления светодиод мигает, при самостоятельном режиме - светится постоянно, синий цвет - откат по памяти.
Крепление деталей к платформе робота осуществляется нейлоновыми болтами, гайками, стойками.
Состав пульта: Ардуино Нано, джойстик, передатчик 433МГц, клавиатура на 5 кнопок.
Видео испытаний инфракрасных датчиков: https://youtu.be/F4poZUIt5Mc
Видео испытаний ультразвуковых датчиков: https://youtu.be/s-vzDc4BbiA
Видео поворотов: https://youtu.be/dissl3xMw9Y
По части программирования Arduino:
KemaUS - класс для работы с ультразвуковыми датчиками. При расстоянии до препятствия более 30см робот движется вперед, сигнал на LED индикаторе зеленый. При расстоянии 15 - 30 см - он останавливается, LED индикатор желтый. При приближении препятствия менее чем на 15 см - робот едет назад, LED индикатор красный.
KemaIR - класс для работы с инфракрасными датчиками. Данные датчики срабатывают на определенном расстоянии, в данном случае чуть ниже плоскости, на которой стоят колеса робота. Если хотя бы один срабатывает, то робот останавливается.
KemaState - класс для сохранения состояния робота. В него записываются показания датчиков, скорость и поворот, если есть. В скетче для Ардуино Меги используются две переменные этого класса: текущее и предыдущее состояния. Также используется в классе KemaMem.
KemaDrive - класс для управления моторами. Скорость отрицательная - назад, положительная - вперед. Отрицательный поворот - влево, положительный - вправо.
KemaLED - класс для управления полноцветным LED индикатором. Мигание означает режим радиоуправления, постоянный свет - режим робота. При этом могут гореть три цвета:
зеленый - робот едет вперед (нет препятствий);
желтый - робот стоит;
красный - робот едет назад.
Синий индикатор - откат по памяти.
Чертежи, схемы, классы Arduino в моей группе по робототехнике: https://vk.com/myrobotics