Автор: Владимир Герасименко.
Противостояние защиты и нападения, чьим частным случаем является знаменитая борьба снаряда и брони, появилось одновременно с первым оружием, позже распространившись на гораздо более широкие сферы. Обычно такое сводится к банальным «вот у нас есть меч» и «а вот у нас есть щит, который не пробивается мечом» или Ахт-Ахт не мог пробить броню ИС-3, поэтому ИС-3 имба. Но в реальности такие противостояния редко сводятся к простому превосходству характеристик защиты над атакой, всё же мы живём не в РПГ. Во время Второй мировой войны началось такое противостояние между РЛС и комплексами по их глушению. Это незримое противостояние оказало значительный итог на ход войны, но широкой общественности она почти неизвестна.
Время исправить это упущение.
Упрощённый принцип действия радара. Антенна излучает пучок сигналов, часть из них отражается и попадает на антенну-приёмник. По разности времени между отправкой сигнала и получением отражённого вычисляем расстояние до цели
Заря новой эры
Существует легенда: во время Второй мировой войны англичане ввели в действие первые радары и за счёт этого увеличили эффективность собственной истребительной авиации (благодаря раннему обнаружению противника), но для сокрытия факта внедрения инновации разведка распространила слух, что на самом деле английские лётчики просто кушают морковь и от этого лучше видят. Немцы якобы поверили в эти слухи и начали пичкать своих пилотов морковкой, но без всякого эффекта.
История красивая, жалко, что это миф. Ещё до начала войны немецкий дирижабль радиоразведки LZ-130 поймал неизвестный радиосигнал, идущий с Британских островов. Так как сигнал имел постоянный характер и низкую частоту (всего 20-30 МГц), то в Люфтваффе решили, что это британская система наведения самолётов, наподобие немецкой Knickebein, или система связи флота. Но уже в ходе французской кампании специалисты по радиотехнике выразили сомнение в назначении неизвестных сигналов, которое ещё больше усилилось после захвата в Дюнкерке мобильной РЛС GL Mk. I, предназначенной для корректировки зенитной артиллерии.
Радар корректировки зенитного огня GL Mk. II. Развитие младшей версии, фото которой, к сожалению, не нашёл. Такие радары, как на фото, поставлялись по ленд-лизу в СССР
Стало ясно, что у англичан есть радарные технологии и неизвестный сигнал может быть сигналом РЛС. Это была система РЛС Chain Home (СН), первый элемент которой был введён в строй в 1937 году, а к 1939 году вдоль побережья Англии стояла уже 21 установка.
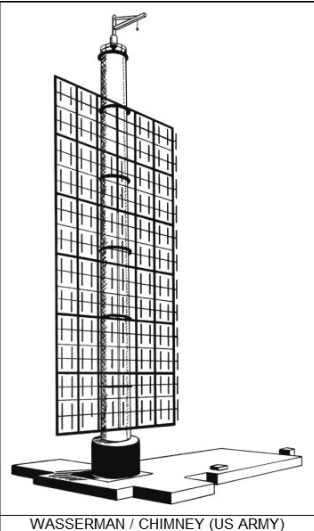
Что из себя представлял радар Chain Home? Основным требованием военных при разработке радара было максимальное использование уже существующих технологий для удешевления и ускорения её производства. Поэтому инженерам пришлось решать проблему радиолокации не самыми оптимальными методами. Например, пришлось использовать уже существующее радиооборудование с частотой сигнала 20-30 МГц (длина волны – 12 метров). Такой выбор привёл к тому, что радарный комплекс выходил очень массивным, а реализовать вращение антенны и сам режим сканирования не представлялось возможным. Поэтому пришлось выбрать схему с «подсветкой» – радар постоянно излучал в пространство импульсные сигналы в широком секторе: длительность импульса составляла 20 мкс, а период следования – 40 или 80 мс. Максимальной дальностью действия радара считается 190 км.
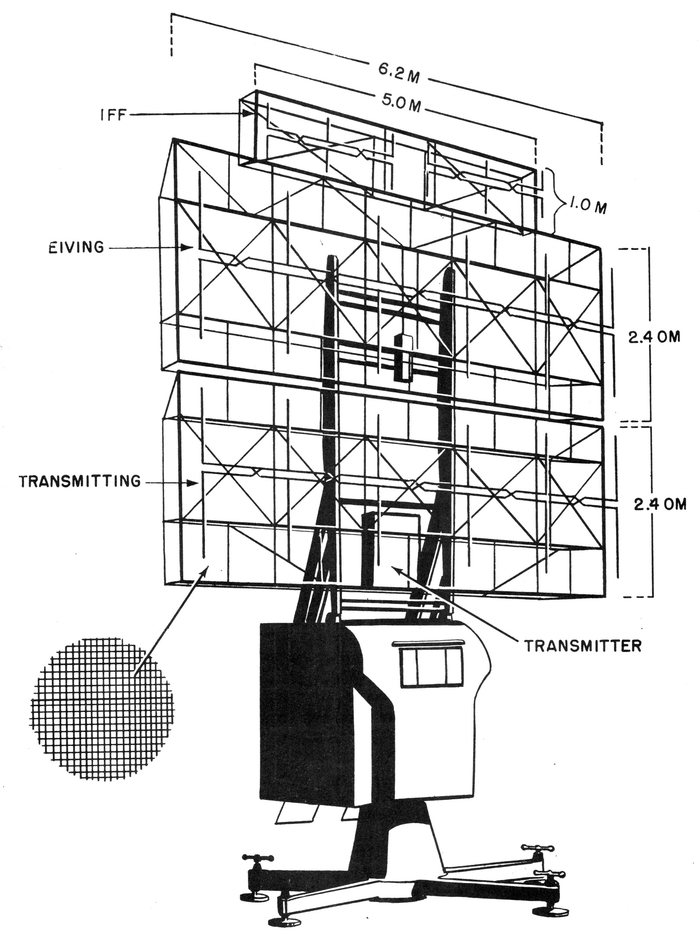
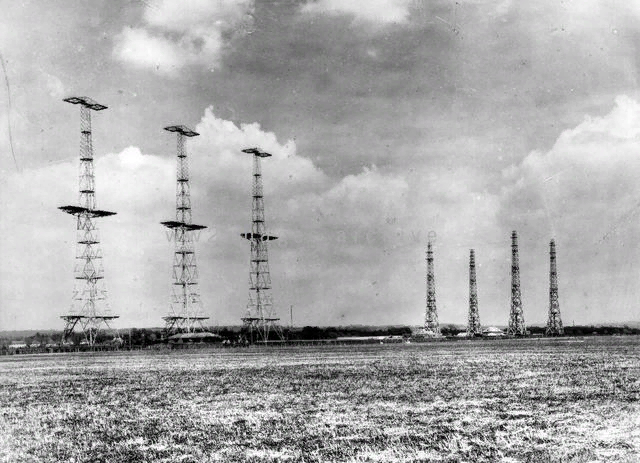
Слева 3 антенны-излучателя, справа — 4 антенны-приёмника Chain Home
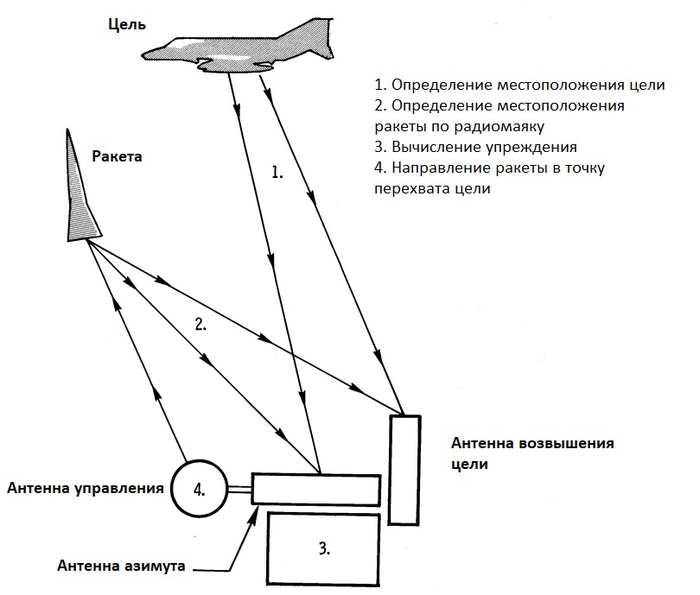
Как и все импульсные радары, CH измерял время, необходимое для отражения сигнала обратно в приемник, и рассчитывал расстояние до цели, умножив время между отправкой импульса и его возвращением на скорость света, а затем разделив на два. Полученное значение расстояния до цели выводилось на дисплей, после чего оператор должен был выполнить ещё несколько манипуляций для определения пеленга (угла следования цели по отношению к радару) и высоты полёта (для чего приходилось использовать специальный механический калькулятор и таблицу эталонных замеров параметров сигнала для разных высот). Если бы радар был «сканирующего» типа, то эти манипуляции можно было бы автоматизировать, так как вращение антенны упрощало задачу определения пеленга.
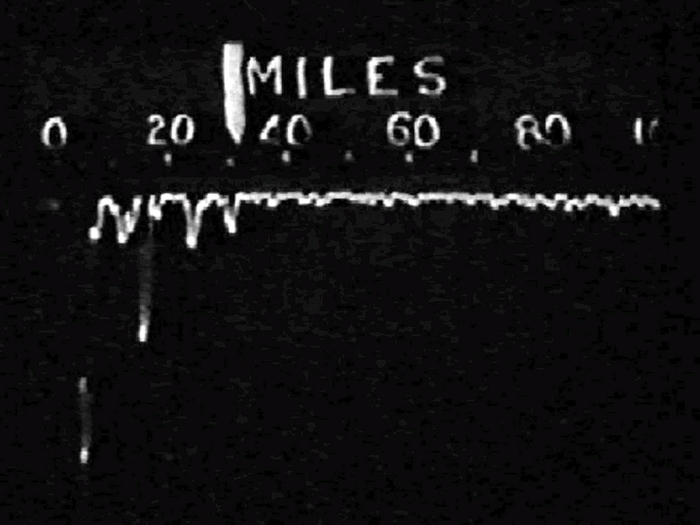
Экран радара показывал только расстояние до цели по прямой
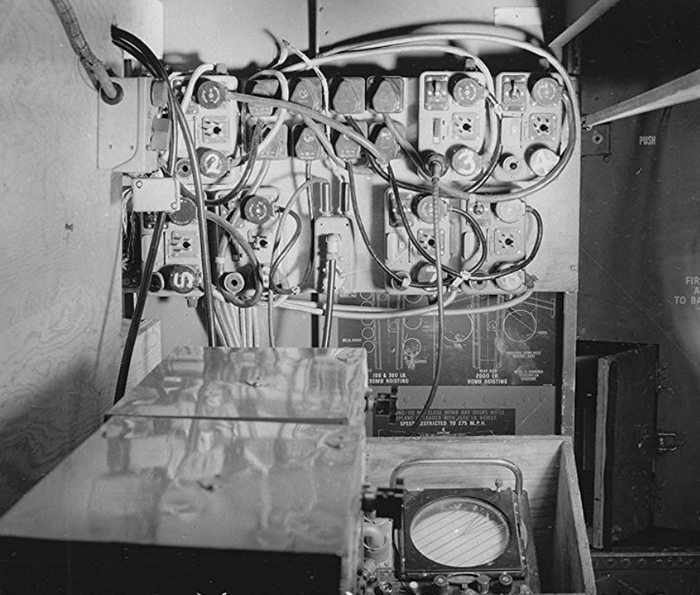
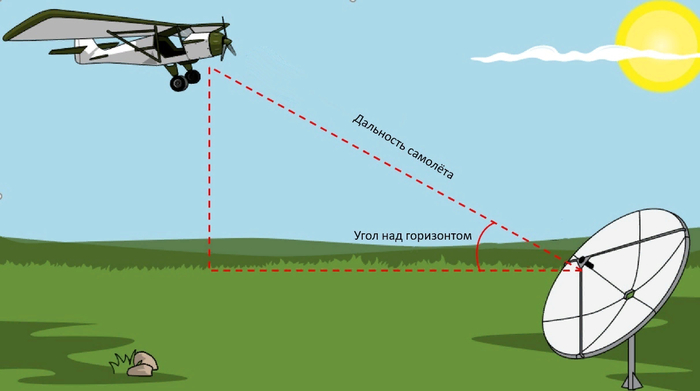
Чтобы вычислить высоту, оператор вращал ручку гониометра (на фото слева). При задействовании гониометра измерялся угол относительно горизонта
Далее с помощью калькулятора по известной гипотенузе (расстоянию самолёта) и углу её наклона (вычисленному на предыдущем этапе) вычисляются катеты прямоугольного треугольника, определяющие высоту и расстояние вдоль земли. Ясное дело, что такие вычисления были достаточно медленными
Полученные координаты наносились на карту, с учётом направления движения объекта
Кроме того, радар имел ряд проблем из-за выбранной схемы:
– низкая точность (от 1 до 8 км);
– сложности с определением единичных объектов;
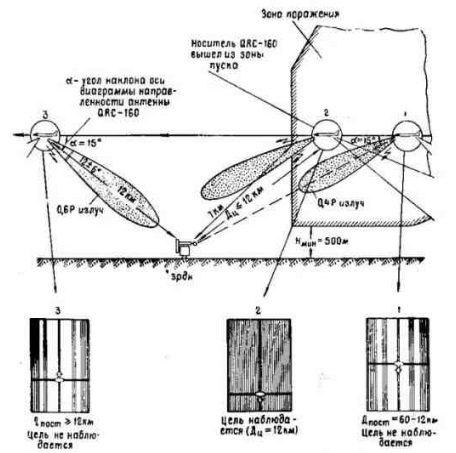
– мёртвая зона прямо перед передатчиком (при полёте цели прямо на радар, отражённый от него сигнал возвращался на передатчик, не попадая на приёмник, отстоявший на сотню метров) и на низких высотах;
– длительность и трудоёмкость ручного вычисления высоты и курса цели.
Но кроме недостатков были и достоинства – за год британцы сумели полностью обеспечить радарным покрытием всё южное и восточное побережье.
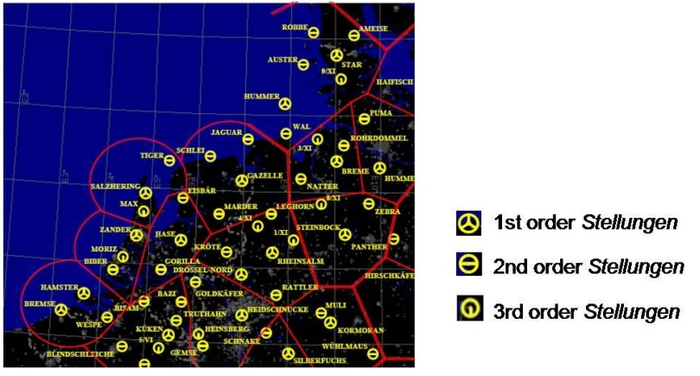
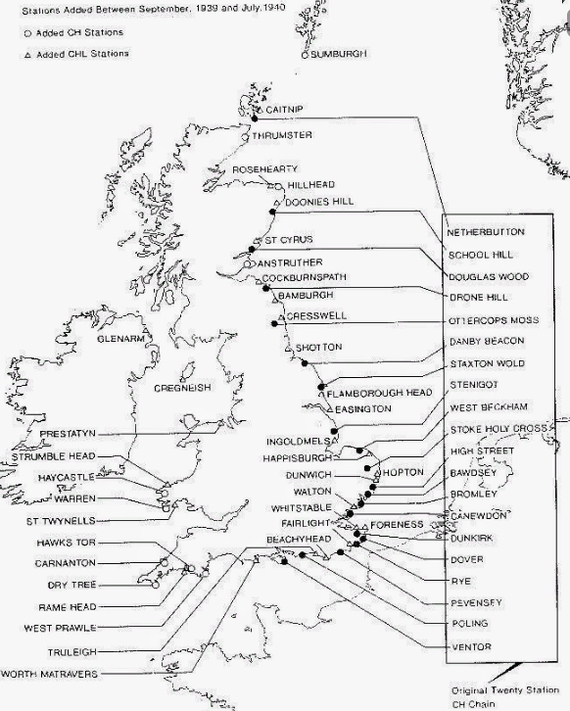
Карта установленных за 1939-1940 радарных станций системы Chain Home
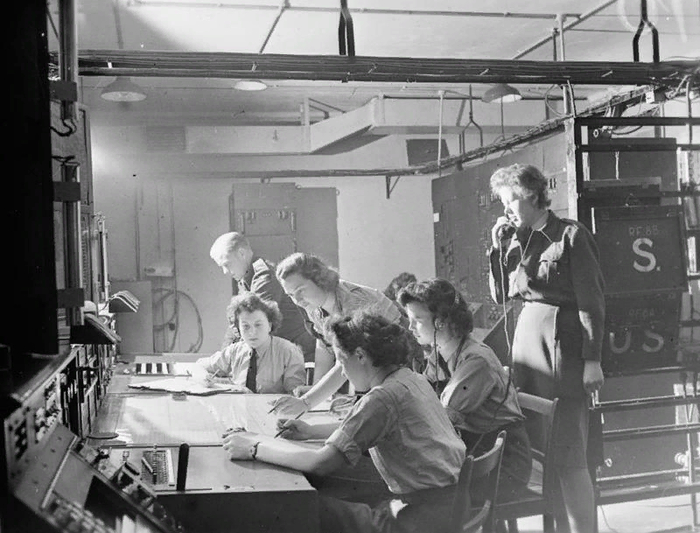
Система ПВО Англии во время Битвы за Британию
Немцы, планируя нападение на Британию, вынуждены были учитывать этот факт. Хотя поначалу ведомство Геринга не воспринимало их как серьёзную помеху: предполагалось, что Люфтваффе сможет с лёгкостью разбомбить радарные станции. Реальность оказалась скорее удручающей – даже если удавалось повредить конструкции антенн, то их быстро восстанавливали.
Тогда Немецкий исследовательский институт аэронавтики предложил более тонкий подход – заглушить радары. Идея была проста: зная частоту радара, можно сгенерировать помеху большой мощности на этой частоте, которая забьёт реальные отражённые сигналы и перегрузит канал оператора – сигнал помехи будет гораздо больше и ярче на экране. Уже в июле 1940 года на французском берегу Ла-Манша был размещён глушитель, который посылал постоянный синусоидальный сигнал большой мощности на частоте работы радара, но значительного эффекта он не оказал.
Причиной этому было то, что разработчики СН ещё во время проектирования предусмотрели вероятность его глушения. Поэтому в составе оборудования комплекса были реализованы сразу несколько мер противодействия помехам:
1) встроенный фильтр частот, который позволял частично отфильтровать помехи;
2) особенности дисплея отображения, составленного из двух слоёв: быстро реагирующего слоя сульфида цинка внизу и более медленного «послесвечения» слоя сульфида цинка-кадмия наверху. Во время нормальной работы был виден ярко-синий сигнал от сульфида цинка, и его сигнал активировал желтый слой сульфида цинка и кадмия, в результате чего «усредненный» сигнал отображался желтым цветом. Чтобы отфильтровать постоянную помеху, желтый пластиковый лист был помещен перед дисплеем, делая синий цвет невидимым и позволяя различать более тусклый желтый усредненный сигнал.
Экран радара современного типа, но выполненный по схожей технологии
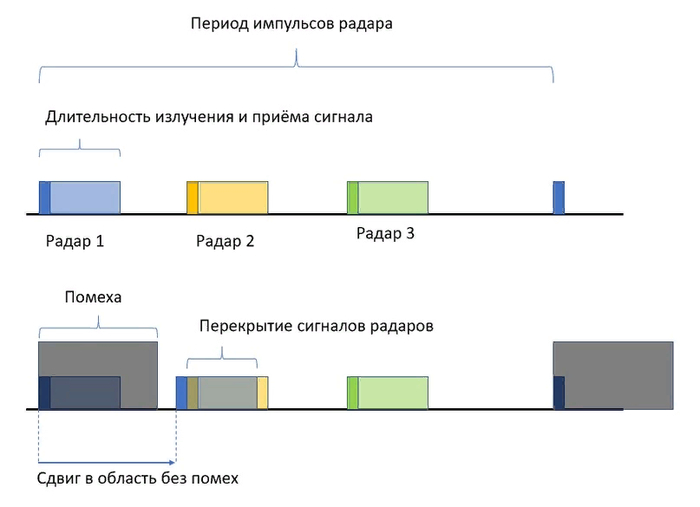
Таким образом сама аппаратура фильтровала большую часть постоянных помех, тем не менее наличие их замедляло общее время реакции операторов на изменение обстановки. Поняв, что метод не совсем работает, немцы усовершенствовали систему глушения. На этот раз глушить предполагалось импульсными сигналами во временном диапазоне выбранной станции, аналогичными испускаемым радаром. Для избегания помех такого рода оператор мог немного сместить временной диапазон на время равное времени действия помехи. Но такое действие порождало каскад неприятностей: радар начинал глушить соседние установки, их операторы тоже смещали диапазон и снова глушили соседей.
Причиной этого была специфика построения системы радаров: радарные станции имели перекрывающиеся зоны покрытия для исключения появления слепых зон. Но если все станции будут работать в одном временном интервале, то они будут глушить сигналы друг друга. Поэтому, для исключения такой ситуации, было реализовано разделение радиоканала по времени: каждый радар вещал в своём жёстко заданном временном интервале, подобранном таким образом, чтобы времена излучения и приёма сигнала не пересекались с соседними установками. Поэтому сдвиг периода вещания (фазы сигнала) одной станции относительно другой мог привести к заглушению её передач и необходимости уже ей сдвинуть окно передачи.
Принцип разделения канала радаров по времени и проблемы глушения
И такая атака оказалась куда успешнее, вызвав неработоспособность системы СН на некоторое время в сентябре 1940. В качестве контрмер британцами было принято решение менять сдвиг по времени синхронно вместе с соседними установками, чтобы избежать взаимного глушения.
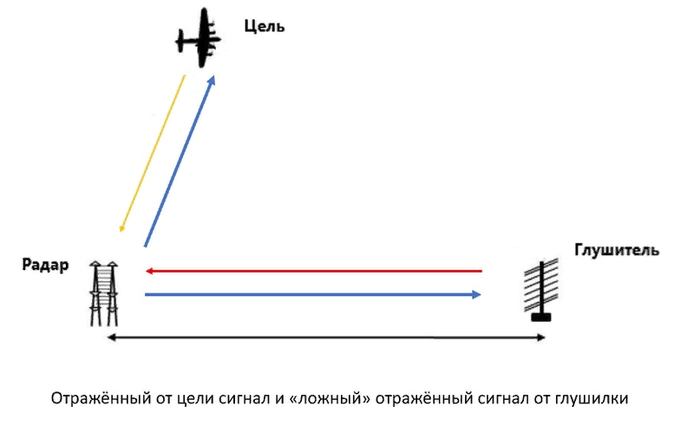
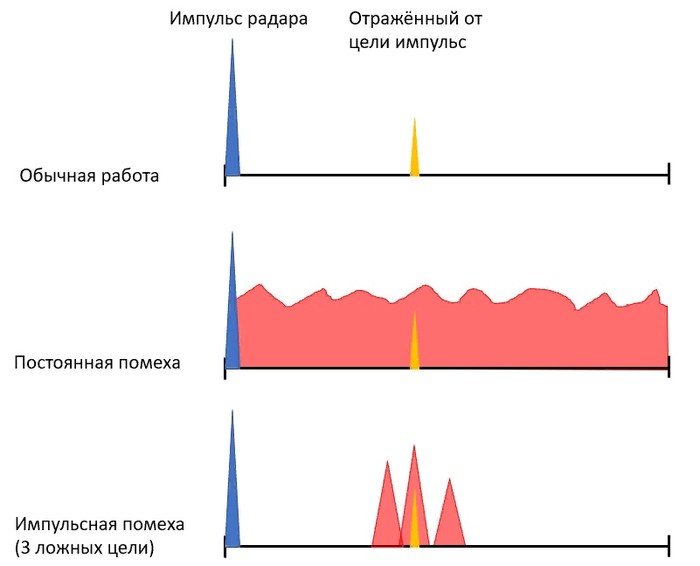
Так как очередной метод глушения перестал показывать эффективность, то немцы разработали ещё один, реализованный в глушителях с кодовым наименованием «Garmisch-Partenkirchen» (это город в Германии, установкам для глушения давали такие наименования для секретности). Работа этого глушителя основывалась на генерации сигнала для РЛС только в случае фиксации входящего импульса от неё. Таким образом глушилка подстраивалась под меняющийся сдвиг фазы передачи. Причём если предыдущие попытки ставили целью заглушить радар – т.е. применить грубую силу, то в данном случае радар скорее обманывали, посылая сигналы максимально похожие на реальные цели, заставляя тем самым англичан лишний раз вхолостую поднимать перехватчики.
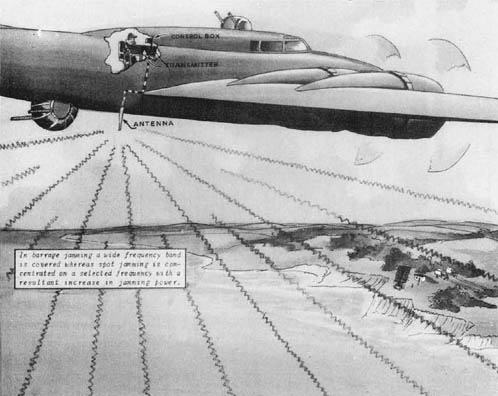
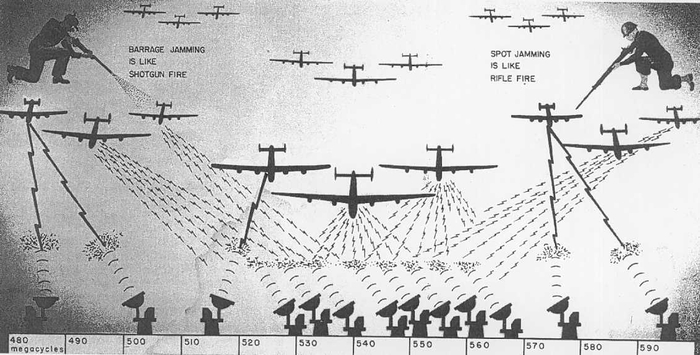
Различие методов глушения. Общий принцип — скрыть реальный сигнал за более мощными ложными
Данные установки вошли в эксплуатацию уже в 1941 году, после окончания Битвы за Британию, и не смогли оказать значительного эффекта на её исход. В качестве мер борьбы с таким видом глушения был создан блок автоматического переключения частот в случайные периоды времени – «Блок преднамеренного подавления джиттера», позволяя разделить истинные сигналы от реальных объектов – от ложных от немецкого генератора помех, так как помехи на иной частоте дрожали на экране. При этом немцам приходилось постоянно вручную осуществлять поиск частоты и подстройку сигнала. Тем не менее, так как действия по различению ложных сигналов требовали значительного опыта у оператора радара, то метод можно считать условно успешным – в лучшем случае он замедлял время реакции на обнаружение, в худшем заставлял пилотов искать несуществующие цели.
В конце концов, самым действенным методом борьбы с помехами стала разработка более совершенных радаров, работающих на гигагерцовых частотах (сантиметровый радар), сигнал которого немцы не могли заглушить, так как не имели технологии магнетрона для его генерации. Несмотря на все проблемы с глушением, по подсчётам британцев за счёт наведения самолётов на цель с помощью радаров и отмены постоянного патрулирования в воздухе, эффективность истребительной авиации в ходе Битвы за Британию выросла в 2-3 раза.
Не можешь заглушить - воспользуйся!
Так как с 1941 года центр воздушных операций сместился на восток, то задача подавления британских радаров перестала быть приоритетной, а основное внимание уделялось уже защите от налётов с территории самой Британии.
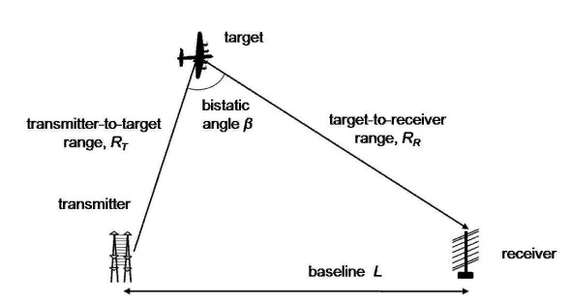
В 1942 году инженер фирмы Telefunken доктор Вехтер предложил создать систему пассивных РЛС, основанную на принципе бистатического перехвата (приёмник и передатчик географически разнесены). В 1942 первый образец системы Klein Heidelberg (KH) был собран в Шербуре, а к концу 1944 их было уже не меньше 6.
Принцип бистатического перехвата - просто и эффективно
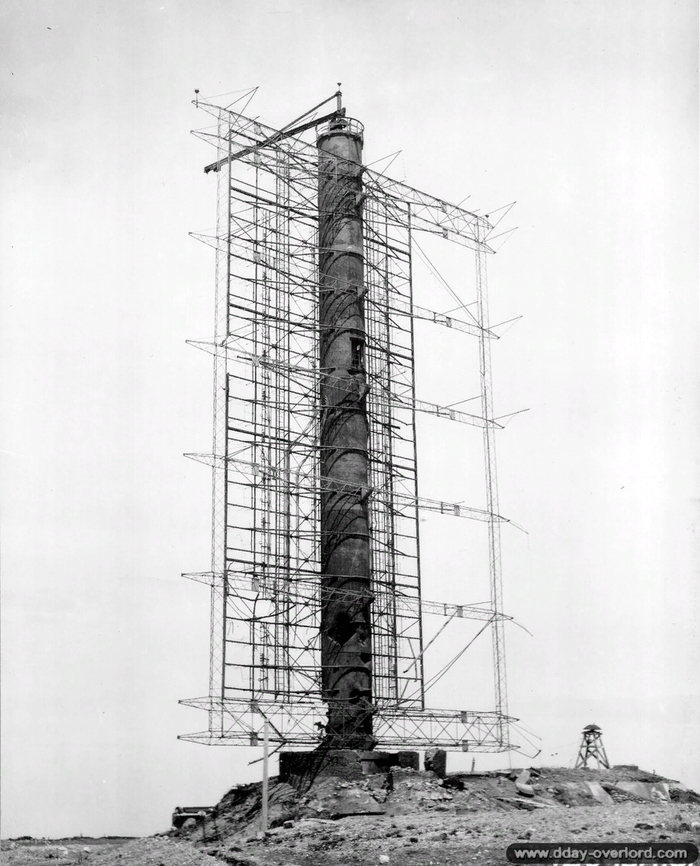
В системе использовались две антенны, одна большая – на вращающейся платформе – которая использовалась для приема сигнала, отраженного от самолета, и гораздо меньшая, расположенная на расстоянии около 60 метров, которая принимала сигнал непосредственно с британского радара Chain Home.
Антенны радара Klein Heidelberg
Оператор сначала выбирает одну станцию CH, изменяя таймер, чтобы он принимал только сигналы от этой станции. Радиостанции CH транслируются во временных интервалах, одна за другой, поэтому было легко выбрать одну из них. Поскольку прямой сигнал от станции СН был очень мощным, он всегда появлялся на дисплее оператора независимо от того, в каком направлении была направлена антенна.
Когда самолет пролетит в зоне работы большой антенны, часть сигнала CH отразится от него и попадет в приемник KH. Поскольку самолет не находится на прямой линии между двумя станциями, общее расстояние, пройденное сигналом до самолета, а затем до антенны, всегда будет больше, чем при прямом сигнале от СН до КН. Разница между сигналом от СН и отражённым от цели показывает разницу расстояний, пройдённых сигналом.
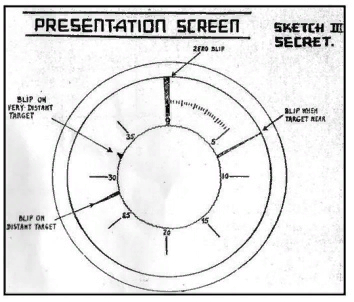
Схема экрана оператора КН с метками для выбора нужного эллипса
Для любой заданной разницы во времени существует бесконечное количество местоположений по высоте и расстоянию от КН, соответствующих этой задержке. На графике эти точки образуют эллипс со станцией CH в одном фокусе и приемником KH в другом – так называемый бистатический диапазон.
RT + RR — полное расстояние пройденное сигналом радара СН до КН. Для каждой суммы таких расстояний был свой эллипс на карте, где каждой точке соответствовал своя высота и расстояние вдоль земли
Для любой заданной разницы во времени существует бесконечное количество местоположений на эллипсе, соответствующих этой задержке. На картах были заранее прочерчены эллипсы, соответствующие 40 вариантам задержек сигнала, так что для определения дальности и высоты цели требовалось измерить угол между условным нулевым положением радара и целью, для чего антенна вращалась и фиксировала направление максимальной величины отражённого сигнала радара от самолёта.
Угол поворота антенны относительно нулевого положения определялся по механически связанной шкале с нанесённой градуировкой. Далее прочерчивалась линия от КН под измеренным углом. Точка пересечения этой линии с выбранным эллипсом и будет местоположением самолёта. Итоговая погрешность измерений должна была составлять от 1 до 10 км при дальности обнаружения до 400 км, что для радара раннего предупреждения приемлемо.
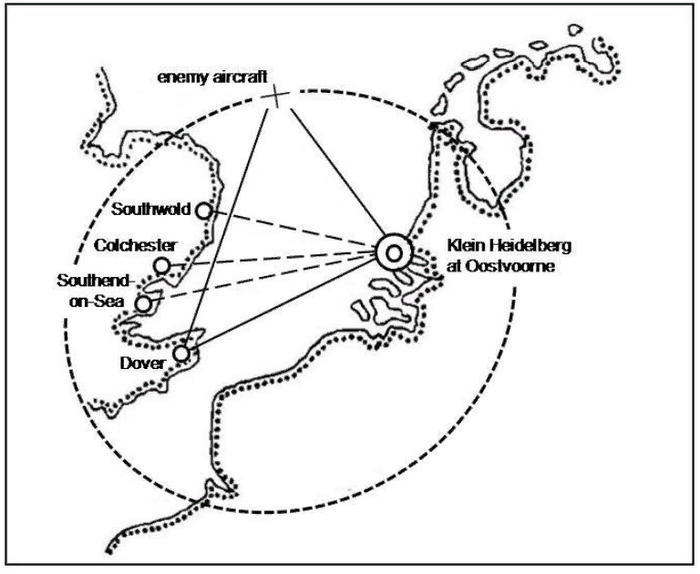
Зона покрытия радара КН
Преимуществом такого пассивного радара было то, что он не излучал никаких сигналов вовне. Англичане до самой высадки в Нормандии были не в курсе целей и назначения антенн, установленных немцами на побережье. При этом радар позволял охватывать своим покрытием значительную часть южной и восточной Англии. В итоге у немцев вышел даже более совершенный радарный комплекс, требующий гораздо меньшего числа действий от оператора, чем британский Chaine Home.
Продолжение противостояния свастики и льва следует...
Автор: Владимир Герасименко (@Woolfen).
Пост написан для блога компании TimeWeb и перенесён на Пикабу с разрешения.
Оригинал: https://vk.com/wall-162479647_362559
Пост с навигацией по Коту
А ещё вы можете поддержать нас рублём, за что мы будем вам благодарны.
Яндекс-Юmoney (410016237363870) или Сбер: 4274 3200 5285 2137.
При переводе делайте пометку "С Пикабу от ...", чтобы мы понимали, на что перевод. Спасибо!
Подробный список пришедших нам донатов вот тут.
Подпишись, чтобы не пропустить следующую часть!
Она выйдет завтра около 18:00 по МСК.
UPD. Продолжение: Заглушить радар. Свастика против льва. Часть 2 из 2