

Беспилотник из мусора
Ну почти из мусора) Частично, короче
Ну почти из мусора) Частично, короче
Давным-давно, в далеком-далеком провинциальном городишке я загорелся идеей построить радиоуправляемый самолет, но увы у малолетнего пиздюка обычного школьника денег не особо есть, но годы идут и вот за плечами универ, армия а идея так и осталась жива, благо прогресс как и годы не стоит на месте и получить нужные запчасти при наличии денег не составляет труда. На рынке уже давно появилось много плат для стабилизации самолетов в полете и даже полетных контроллеров с помощью которых авиамодель можно превратить в подобие БПЛА. Ну что-ж, дело остается за малым - построить чего-нибудь летающее.
С помощью говна и палок пенопласта, клея, скотча, полетного контроллера Pixhawk и необходимой электроники была построена первая версия самолета, которая, таки, неплохо полетела:
Дело сделано, я счастлив, но что-то мешает мне спать... Качество исполнения авиамодели(если это можно так назвать), да...
После недели ночных кошмаров было решено - сделать что-нибудь получше. Затариваюсь:
- лист экструдированного пенопласта 1000х500х50 мм
- клей типа Титан
- трубы алюминиевые 8мм и 6мм
- некоторое количество терпения, чтобы не забить
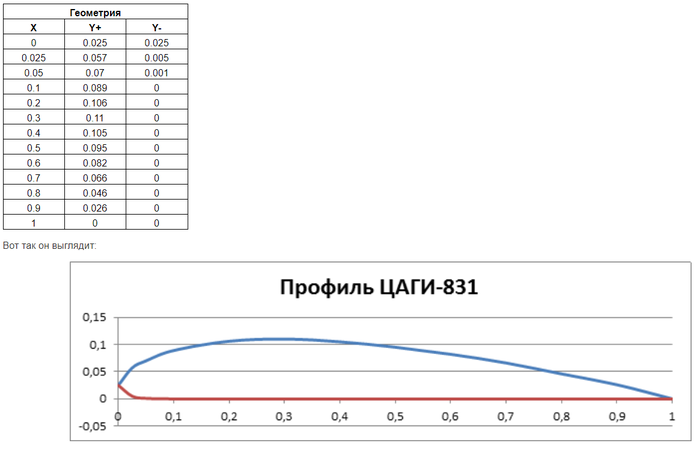
Для начала, покурив форумы выбрал более подходящий профиль крыла(не нарисованный мною на угад от руки), выбор пал на ЦАГИ-831:
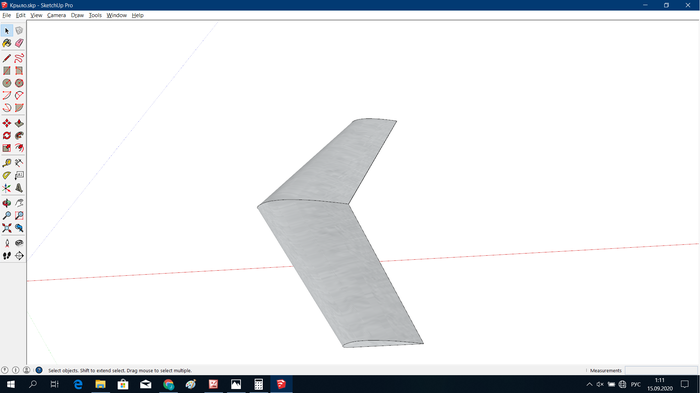
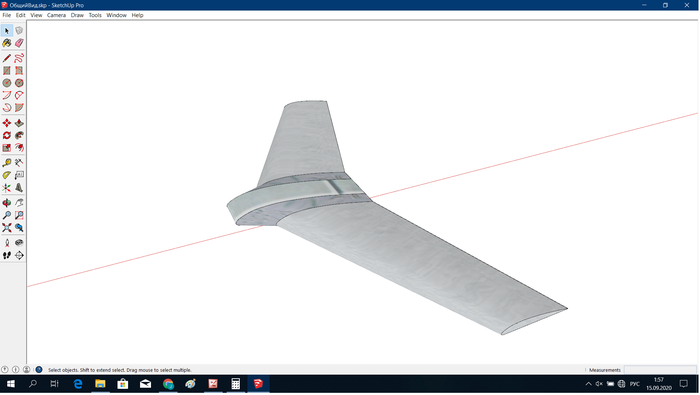
Потом накидал его модельку в 3д:
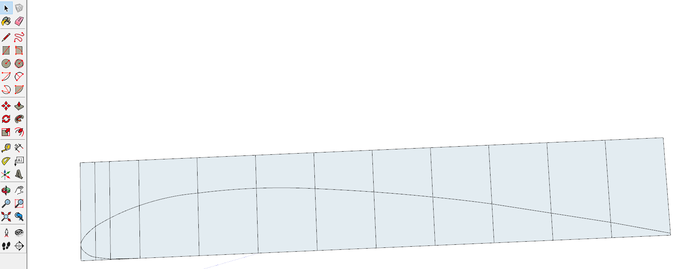
По модельке профиля отрисовал консоли и фюзеляж:
Итого получилась такая фигня:
Ну что-ж, пора идти в гараж и рукожопить. По моделькам сделал шаблоны нервюр нужного масштаба из бумаги, потом вырезал их из тонкого ДВП. Расчертил лист пенопласта, нарезал две консоли крыла, три куска фюзеляжа. С помощью резака из трех досок, нихромовой нити и трансформатора на 12В по шаблонам вырезал части будущего летающего крыла:
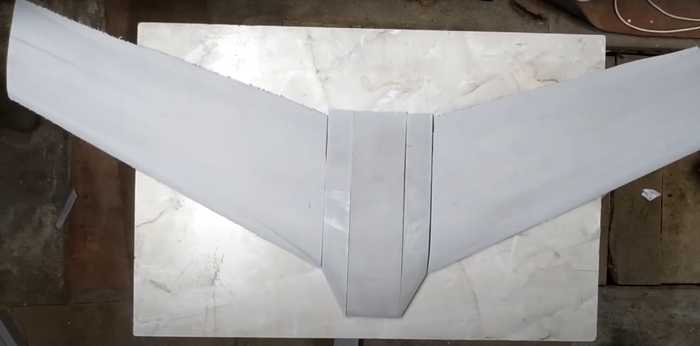
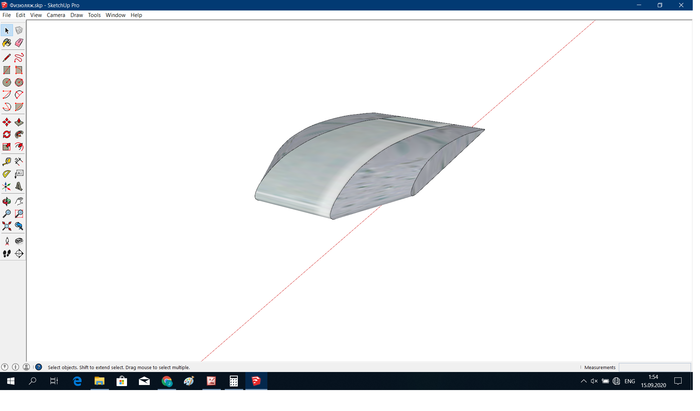
Потом, подогнав все части надежно как уж получилось склеил их клеем, результат на фото:

На данный момент это все что успел сделать, дальше планирую нарисовать модель рамы, которая будет вклеена в фюзеляж, в ней будет размещена вся электроника, проложен каркас из алюминиевых труб(самолет будет разборный), рама будет печататься на 3д принтере COPETом, также напечатаю посадочные места под сервоприводы.
Если интересно, есть видео процесса изготовления пенопластовой тушки:
Спасибо за внимание, по мере доработок по ЛК, буду выкладывать посты, если конечно это кому-нибудь интересно...



Спроектировал и собрал самолёт ростовский мастер Игорь Негода, на фото результат более чем 10 месяцев работ. Фото взяты из его Инстаграма. Также ведёт канал на YouTube.
Скоро ожидается первый старт.
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.
Привет опытные и не очень коптеристы, я намериваюсь собрать квадрик 450 для съёмки крутых видов(в смысле не екшона).
Облизываюсь я на KIT-ового дрона с тех пор как приобрёл SYMA X5 и понял что щётки говно, а штатное ФПВ работает на 10м.
И вот появилась возможность приобрести квад ценой в 8к гривен(я с Украины).
Я начал с просмотра цикла видосов AlexGyver-а, и потихоньку подбирал компоненты.
Вот что вышло:
1) основной KIT(вариация G)
2) камера
3) передатчик(видео)
4) приёмник (видео)
5) телеметрия
6) виброразвязка
7) пропы
(Pikabu не прохавл ссылки от битли, но я думаю что точку в домене поставить сможете)
Я знаю что акум в ките гуано, и по-этому, буду делать свою сборку на высоко-токовых 18650.
Жду любую критику моего конфига!

P.S. Баянометр нашел ток левый пост про феминисток
Всем привет!
Пожалуй, начну свой пост с обращения к аудитории Пикабу в целом и к 661 человеку (кто до сих пор со мной, несмотря на моё поведение) в частности. Поздравляю всех с Новым годом и приношу свои искреннейшие извинения за то, что столько времени не постил, а также благодарю за терпение =)
По правде говоря, какое-то время назад меня начала сильно мучить совесть. Отдельное спасибо за это товарищам: @Bakut8536, @viktorq, @bacara1138 и @mr.Shify за то, что пинали меня, побуждая к действию.
Внимание, впереди очень много картинок))))
С предыдущего поста прошло очень много времени, теперь мой коптер выглядит вот так:

Что изменилось:
1. Рама - поменял на более легкую: во взлетной массе коптер потерял примерно 180 граммов, плюс развесовка стала более сбалансированной (аккум цепляется под низ, между штангами, @HellKern, я поправил =) теперь при прикреплении подвеса аккум можно сдвинуть к хвосту, и баланс всегда будет оптимальным);
2. Регуляторы - да, многие говорили, что г@#но, и я сам в этом убедился: один очень быстро начал перегреваться и сгорел. По рекомендации @OTR1UM взял Hobbywing Opto 20A - работают без нареканий.
3. Моторы - на одном (или двух) нашел косяк изоляции (разное сопротивление между фазами), заменил на новые.
Остальное (чего немного) осталось тем же.
Итак, всё же часть третья. Колдовство с контроллером.
Для того, чтобы научить нашу "птичку" летать, нужно залить в контроллер прошивку и провести первичные калибровки. Для APM мы будем использовать программу Mission Planner.
Качаем, устанавливаем. Нужные драйвера должны встать сами вместе с программой.
Запускаем планнер.
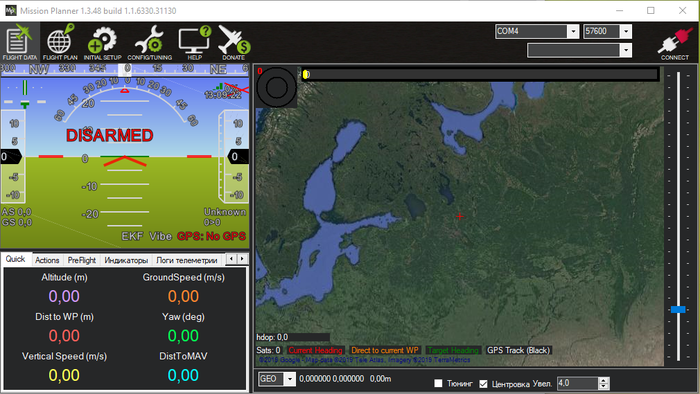
Так выглядит его стартовый экран. Пока все параметры в нулях. Подключаем коптер через USB, но НЕ НАЖИМАЕМ кнопку Connect. В выпадающем списке портов должен появиться новый. Также важный момент: подключайте напрямую к компу, а не через хаб.
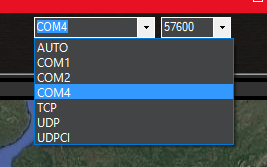
У меня в компе своих два, поэтому новым оказался COM4. У вас может быть какой-либо другой.
Нажимаем кнопку Initial setup, а затем кнопку Wizard.
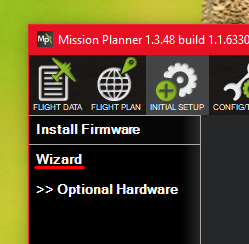
Открывается окно, в котором у нас пойдет первичная настройка.

Шаг 1. Выбор типа нашего дрона. Здесь выбираем Мультиротор (думаю, без комментариев).
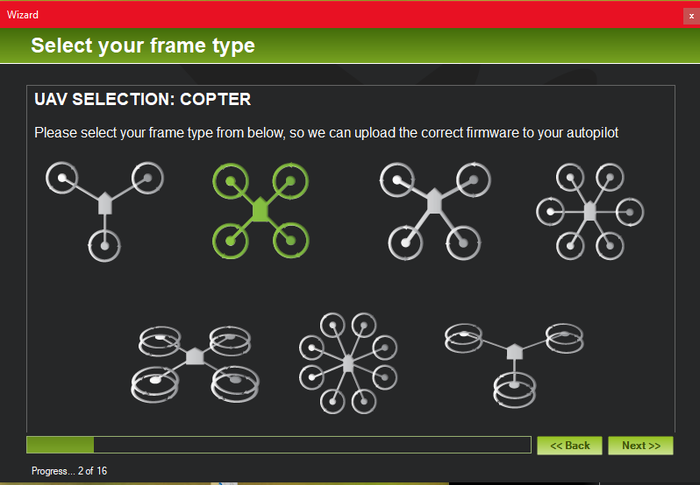
Шаг 2. Выбираем композицию. У меня классический типа X, квадрокоптер.
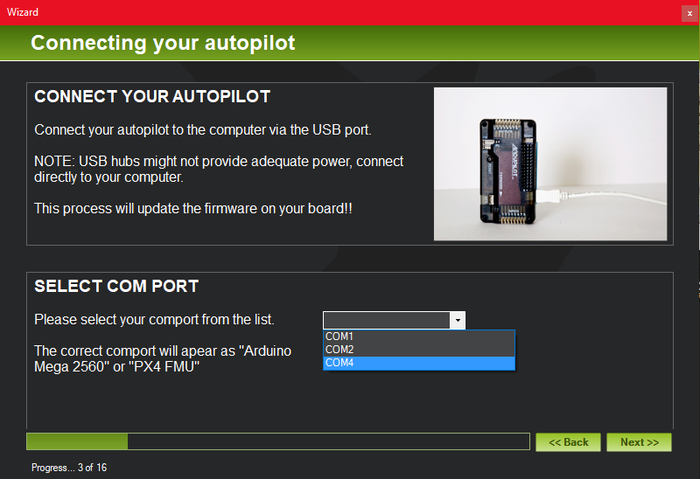
Шаг 3. Указание COM-порта. Здесь указано, что в диспетчере устройств COM-порт будет указан как "Arduino Mega 2560" (для APM) или "PX4 FMU" (для Pixhawk). Я заглянул в диспетчер - да, на 4 порте висит Arduino Mega 2560. Выбираем COM4, жмём Next, заливается прошивка.
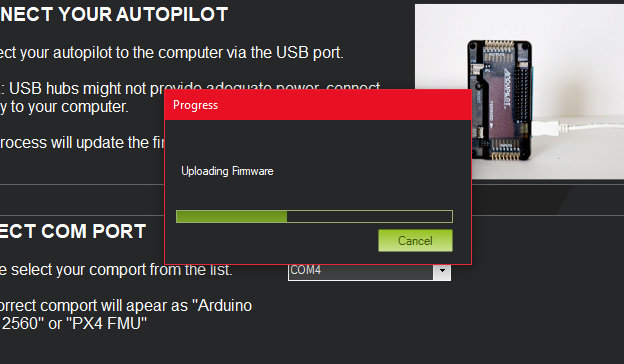
При прошивке программа может сказать, что плата устаревшая, поэтому будет залита последняя выпущенная прошивка. Жмем ОК.
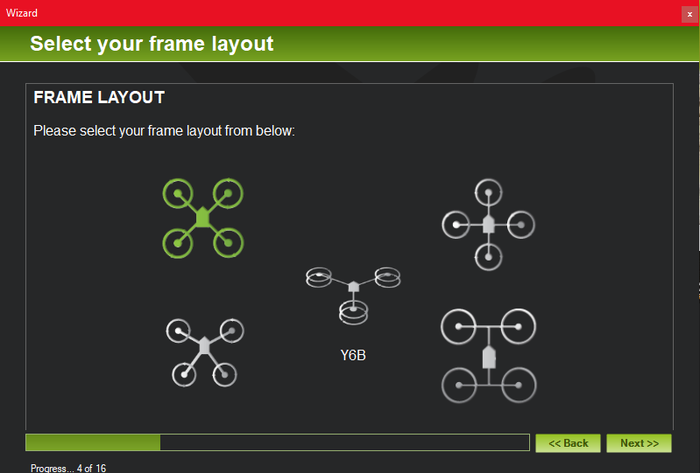
Шаг 4. Выбираем более конкретную раскладку коптера. Почему-то тот, что слева внизу, появился во второй раз о_О. Мой вариант - классический X-квадрокоптер.
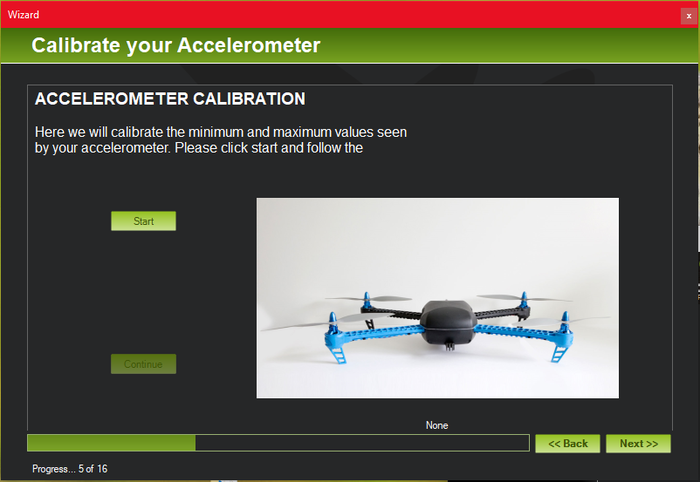
Шаг 5. Калибровка акселерометра.
Если у вас будет включен звук, то каждую манипуляцию вам будет наговаривать экранный диктор. Сначала было стрёмно, потом смешно))) Нажимаем Start. Появится надпись:

Нужно будет поочередно расположить коптер в 6 разных плоскостях (после каждого замера жмем Continue):
- горизонтально (ставим на стол или на пол)
- на левый бок (желательно прислонить его к чему-либо вертикальному, так будет точнее), я прислонял к компу или шкафу. Аналогично для правого бока, носа и хвоста.
- кверху брюхом (переворачиваем и прислоняем к столу снизу).
Главное - не делать больших задержек (больше 20с примерно) между замерами, иначе придется калибровать заново.
Как сделали - переходим к компасу.
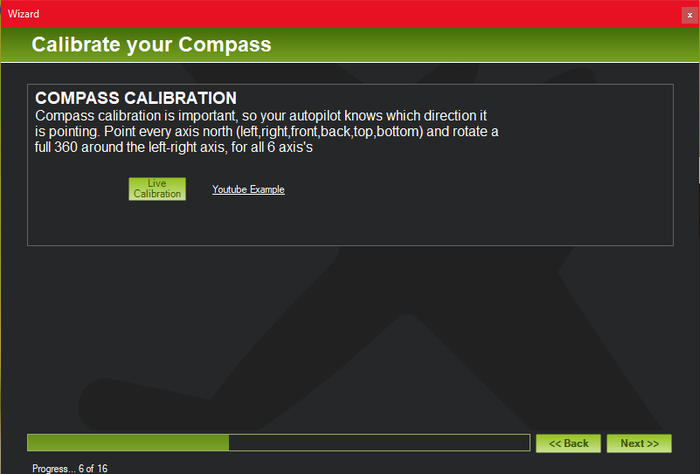
Шаг 6. Калибровка компаса. Компас (у меня совмещенный с GPS) должен быть в "боевом" состоянии (то есть установлен и зафиксирован).
Дальше жмем Live Calibration и начинается веселье: нам нужно этим самым компасом вокруг коптера описать сферу. То есть, мы держим коптер и поворачиваем его в разных плоскостях.. На экране на координатном пространстве будет рисоваться сфера:
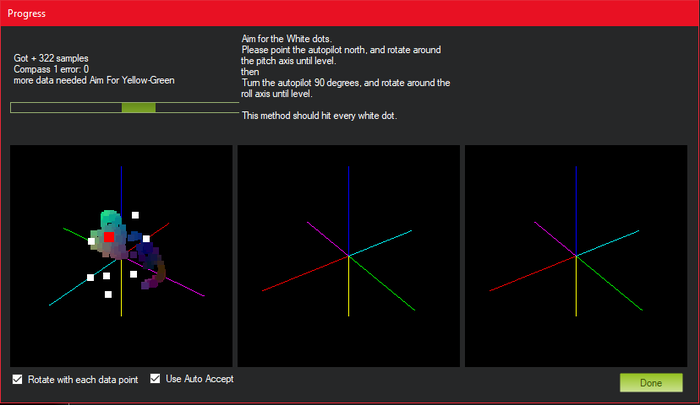
И таким манером крутим коптер, пока не наберется нужное количество точек. Чтобы быстрее набралось - стараемся накрыть белые точки. Появится подобное окошко - всё хорошо, идем дальше:
Переходим к питанию:
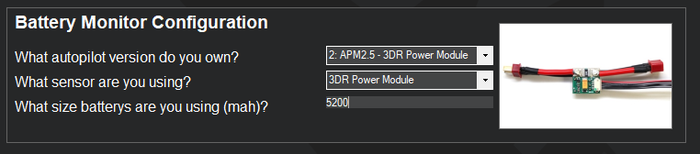
Шаг 7. Вводим данные по тому, как у нас идет питание. У меня такая же девайсина, как на картинке, для нее настройки я указал. Выставляем также емкость аккумуляторов.
Следующим шагом программа спросит, есть ли сонар - пропускаем и переходим к радиоаппаратуре. Видим вот такое:

Затем включаем пульт (процедуру привязки и настройки аппы лучше гуглить отдельно для своей аппаратуры и приемника) и жмем Continue:
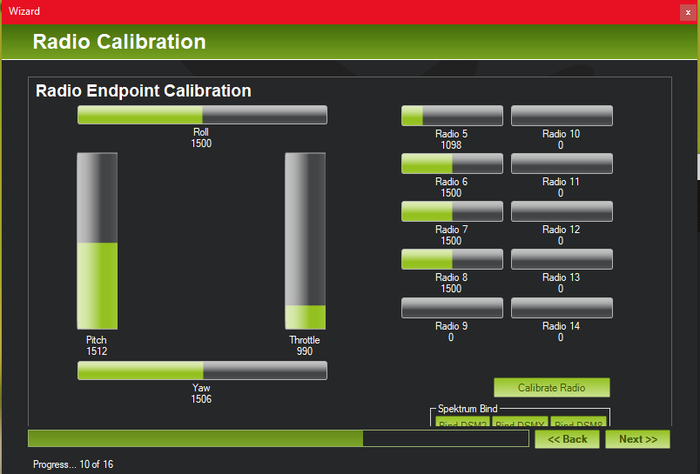
Шаг 8. Проверка аппаратуры: дергаем стики в разные стороны, реагирует ли аппаратура на дергания стиков, и правильно ли их воспринимает. Правильным результатом будет Throttle на левом стике вперед-назад, Yaw на нем же вправо-влево, Pitch на правом вперед-назад, и Roll на нем же вправо-влево. Конечные значения должны быть примерно 980-1000 для минимума, 2000-2020 для максимума. Если у вас не так - жмем Calibrate Radio и гоняем все стики в крайние положения, затем жмем ОК.
У меня на 5 канале стоит шестипозиционная комбинация двух стиков - это я делал для полетных режимов. Это тоже берем из мануалов к своей аппаратуре. Для начала можно не морочиться и просто назначить три режима одному тумблеру.
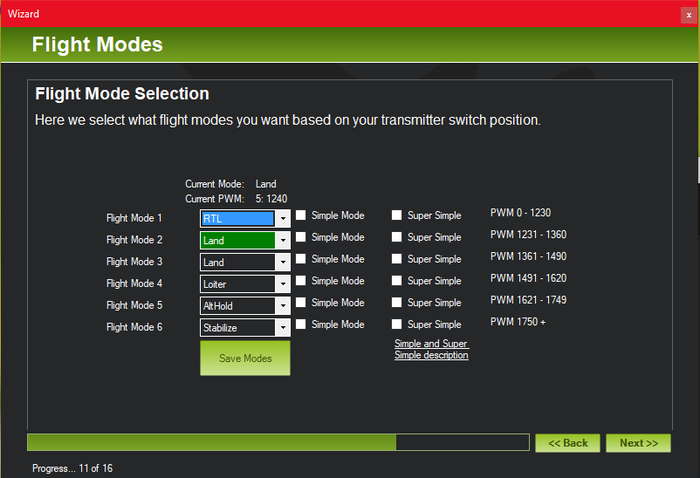
Шаг 9. Установка режимов. Я себе поставил набор, как на картинке.
RTL - это возвращение домой и посадка (на случай, если потеряю его в небе, один раз этот режим спас мне коптер). Коптер выходит на высоту 15 метров, на ней возвращается по прямой к координатам вылета, спускается на высоту 3 метра, затем переключается в режим плавной посадки;
Land - это просто посадка (чтобы с непривычки не ахнуть его об землю);
Loiter - режим удержания точки;
Althold - режим удержания высоты;
Stabilize - самый обычный режим полета со стабилизацией по горизонту.
Зеленый курсор показывает, какой режим сейчас выставлен на аппаратуре (именно поэтому у меня такой бардак в их последовательности). Меняем режим на аппаратуре - выставляем то, что предназначается текущему положению назначенного переключателя. В конце проходим по всем, проверяем и жмем Save Modes.
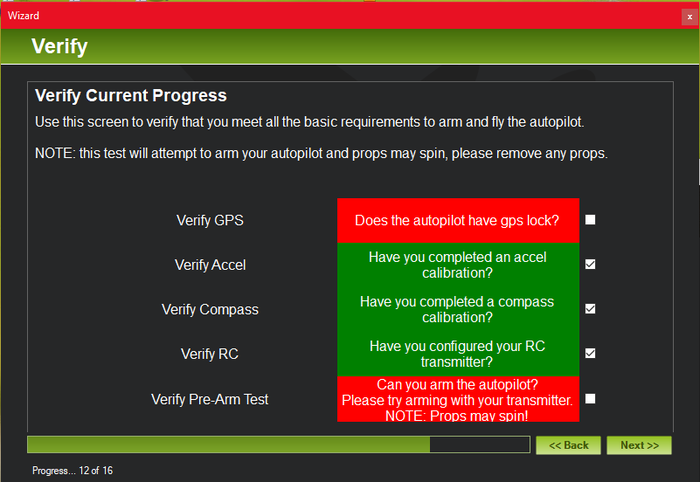
Шаг 10. Проверяем настройки. Если у вас рабочий стол не у окна, то, скорее всего, GPS найден не будет, так что первая плашка останется красной. В противном случае - будет зеленой.
Проверяем, не установлены ли у нас пропеллеры и пробуем заармить (запустить) моторы. Для этого стики на аппаратуре уводим до упора вниз и друг к другу.
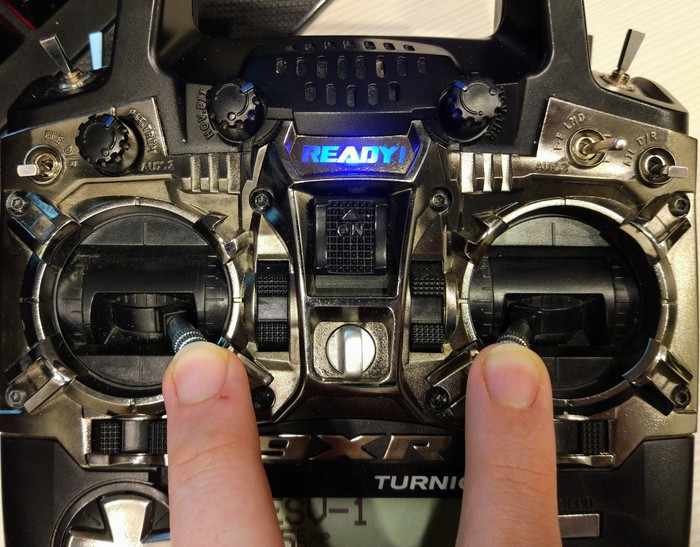
К слову, для дизарма (отключения) моторов делаем тоже самое, но стики направляем друг от друга.
Последняя плашка должна стать зеленой. Жмем Next.
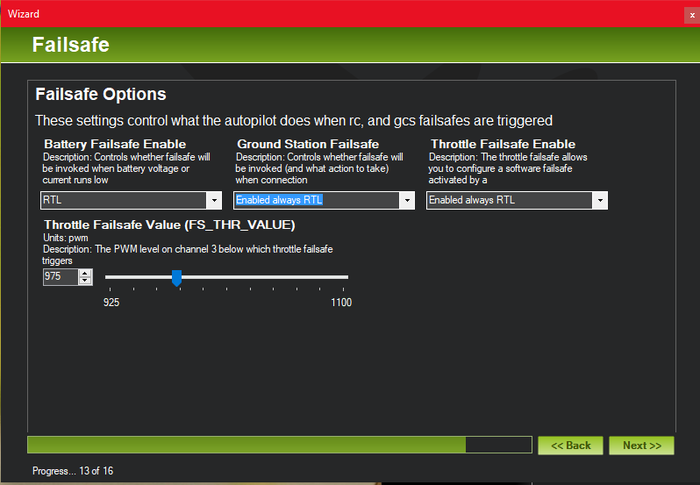
Шаг 11. Настройка Failsafe. Здесь мы выбираем поведение коптера в нештатной ситуации (садится батарея, потеряна связь с наземной станцией, потеряно значение "газа").
В первом случае я даю установку на возврат домой,
во втором - смысла никакого, т.к. у меня не наземная станция,
в третьем - отключение передатчика (аппаратуры) - тоже возврат домой.
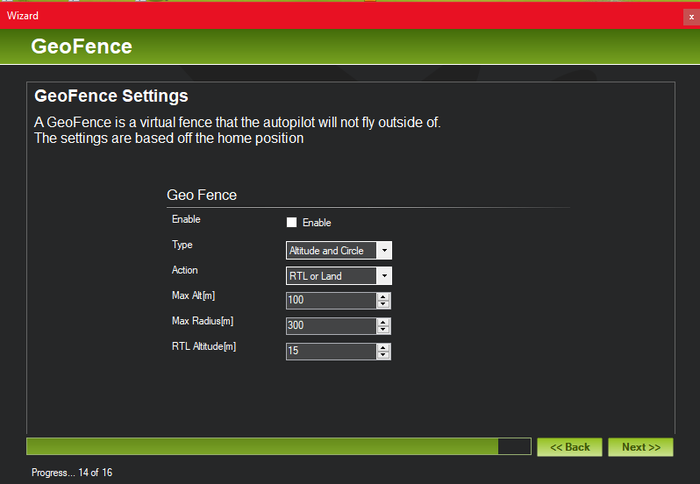
Шаг 12 для тех, кто боится потерять коптер до получения необходимых навыков - настройка "купола", за который коптер не сможет улететь.
Здесь всё просто - при установленной галке ставим параметры, ограничивающие полет: высота, радиус, высота, на которой он будет возвращаться домой в режиме RTL.
На этом первичная настройка контроллера закончена. Жмем Next до упора и отключаем коптер от компьютера.
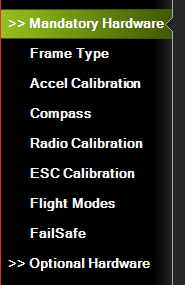
К настройкам можно будет всегда вернуться в разделе Initial setup (для этого коптер подключаем по USB и жмем Connect, если не поключается, играем скоростью - это параметр в выпадающем списке рядом с COM-портами) в меню Mandatory Hardware:
Теперь пара слов о калибровке регуляторов. Эта процедура нужна для того, чтобы ваши регуляторы понимали, какому положению стика газа соответствуют определенные обороты моторов. ВАЖНО: калибровку проводить только со снятыми пропеллерами!
1. Включаем пульт и переводим стик газа в крайнее верхнее положение.
2. Подключаем аккумулятор. Контроллер будет моргать желтым, красным и синим.
3. Отключаем аккумулятор и снова подключаем. Регуляторы издадут несколько серий сигналов:
сначала количество банок аккумулятора (у меня 4), затем ещё дважды (это сигнал, что максимальный газ записан).
4. Переводим газ в крайнее нижнее положение. Регуляторы дадут длинный сигнал, подтверждая, что минимальный газ записан и калибровка окончена.
5. Плавно поднимаем газ - моторы начнут вращаться, набирая обороты по мере набора газа.
На этом всё! Всем ещё раз спасибо за терпение и внимание!
Искренне ваш,

Всем привет!
Мой муж работает программистом автопилотов для беспилотников, и решил поделиться небольшим видео руководством, как собрать квадрокоптер за вечер.
"Для тех кто еще не знает чем занять свой вечер, и для фанатов паяльника и схемотехники, а также любителям, рекомендую к просмотру!
В этом видео, я расскажу как собрать свой квадрокоптер. Но не простой как китайский ширпотреб, мы соберем спортивный дрон.
Я не пилот, но я учусь. Я собираю беспилотники и эта моя профессия. Настало время, собрать что-то для себя и для вас.
Не стесняйся, задавай вопросы в комментариях!
Кстати, основная идея этого дрона, обеспечить мне видео съемку с воздуха."
Есть идея что собрать еще? Пиши по видео!
Коммент для минусов как всегда прилагается!
На видео показан полёт по точкам с использованием полетного контроллера APM 2.6 и программы для Android - Droidplanner 2.

Полетный контроллер APM 2.6(ArduPilot Mega) является полноценным решением БПЛА (Беспилотного Летающего аппарата UAV), который позволяет помимо радиоуправляемого дистанционного пилотирования - автоматическое управление по заранее созданому маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук, DIY) и ведение журнала во встроенную память.
Программа для планшета DroidPlanner 2, она требует наличия OTG от Android устройства. При съемках был использован Chuwi Hi10 Pro.
By #Techn0man1ac aka #MrПоделкинЦ
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi
Всем привет!
Продолжаем нашу чудо-историю про строительство беспилотного пепелаца =)
Прежде всего, я ошарашен) Предыдущий пост увеличил количество моих подписчиков в 183 раза (вас теперь 549, а было трое). Хочу сказать большое спасибо тем, кто заинтересовался, постараюсь оправдать доверие пикабушников.
Также хочу извиниться за большой перерыв между постами - большей частью это вопрос свободного времени.
Да, хочу рассказать небольшую историю о том, как я сподобился именно на сборку, а не на покупку готового коптера под камеру.
На одном из сайтов, где я время от времени бываю, нашел объявление "Тест-драйв DJI Inspire 1". Если что, выглядит он следующим образом:

и стоит бешеных денег (порядка 180к рублей минимум). У меня зачесались руки (интересно же), и я оставил заявку. Через недельку мне позвонили, мы договорились о месте и времени. Опуская ненужные подробности: я попробовал эту вещицу в управлении (да, слушается беспрекословно), порулил камерой, посмотрел стабилизацию. Всё было шикарно. Но было два фактора против: цена (а я всё-таки не миллионер, который может себе позволить такую вещь чисто ради развлечения, и не репортер, зарабатывающий этим деньги, чтобы это было обязательно к покупке) и...у меня появился некоторый азарт, ощущение, что я получу бОльшее удовольствие, если построю сам и сам подниму в небо.
С того дня я начал подбор компонентов.
Ну, подбор я описал в предыдущем посте, так что давайте приступим к объединению этих самых компонентов в летающую машину =)
Начал я с пайки разъемов на регуляторах. В общем, здесь ничего примечательного. Фотка, к сожалению, затерялась, но действовал я так же, как автор вот этого видео (вдохновлялся я именно им):
Отличия в том, что автор видео использовал разъемы "пуля" и для кабелей питания (я брал XT60). Да, и вместо "третьей руки" я использовал старые советские подпружиненные тиски, найденные в закромах. Вещь, скажу я вам, шикарная =)
Затем я решил собирать раму и крепить к ней моторы:


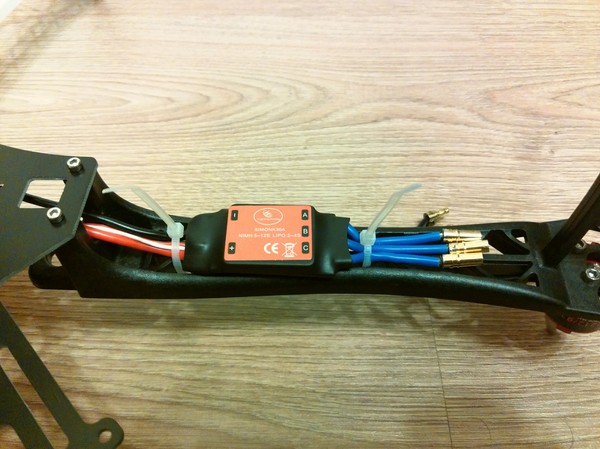
Далее прикрепляем стяжками регуляторы (я крепил снизу, но на деле, где крепить - дело хозяйское):
Дальше вышел небольшой затык: коннекторы на моторах были уже обтянуты термоусадкой, а на регуляторах - нет. Сначала была мысль снять родную термоусадку со всех коннекторов и натянуть свою уже поверх соединения, но её уже не хватало. В общем, я добавил её только там, где не хватало (на фото трубка не прогрета):

Тут есть хитрость: отверстия крепежные на моторах (и на раме) расположены не по углам условного квадрата, а по углам ромба. До этого тоже допер быстро, едва не начав ругаться на китайцев=)
Провод пропустил так, чтобы как можно меньше провисал (впоследствии я и его утянул стяжками).
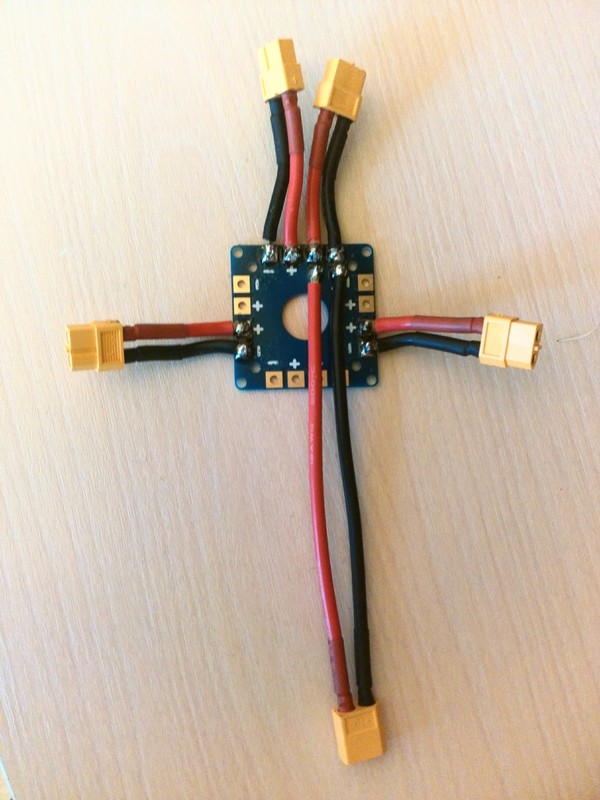
Затем я взялся за пайку платы распределения питания. Инкарнаций было три. На фото первая.
Спаял, думаю - красота! Надо бы лаком покрыть изолирующим!
Хрен-то там...примерил к раме (тут пояснение: я плату реши прикрепить к верхней пластине, но внутри корпуса - и наружу не торчит, и место внутри эффективно используется) - не лезет!
В первой инкарнации боковые провода предполагались для передних моторов, средние - для задних. После обрезки и перепайки плата уместилась, но в той ориентации, в которой находится на фото (средние провода на передние моторы, боковые - на задние).
Третья инкарнация платы родилась так: сижу я, допаиваю...и тут у меня взгляд падает на модуль питания (да, я про него забыл). Модуль посредством паяльника лишился одного из разъемов, затем был припаян непосредственно на плату. На дальнейших фотках можно будет увидеть результат)))
Затем на раму была поселена виброопора для контроллера:
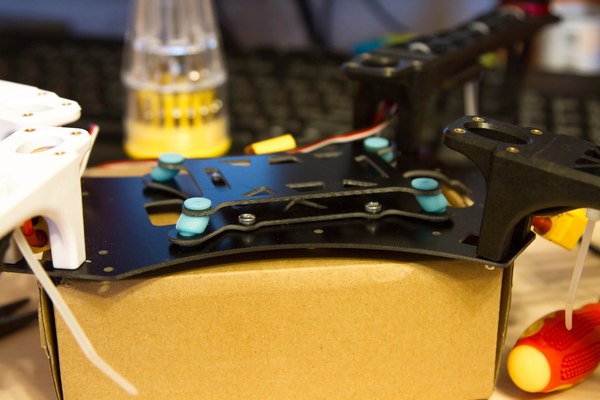
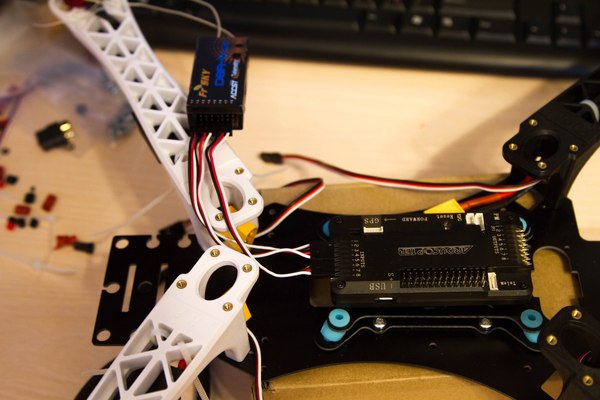
И, собственно, на 3М двусторонку был посажен сам контроллер (на фото вместе с подцепленным приемником):
Да, про подключение:
к выходам контроллера подключаем моторы:
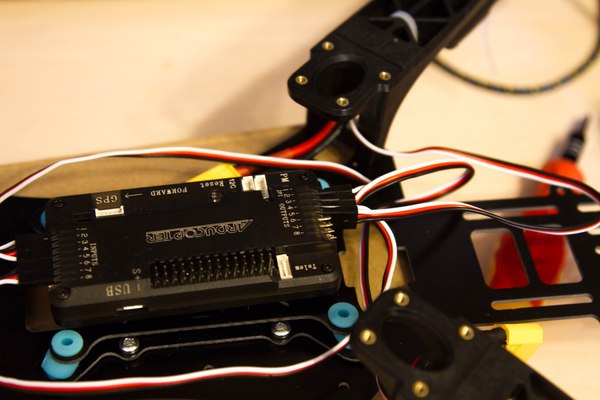
Схема подключения моторов к контроллеру следующая:
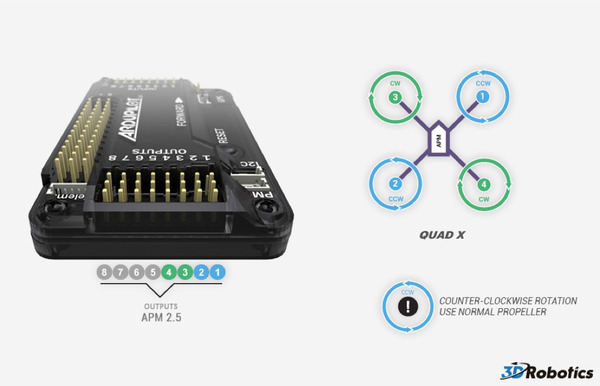
По контактам: нижний/самый наружный - минус, средний - плюс, верхний/внутренний - управляющий.
Подключение приемника (сейчас будет фото, как НЕ надо делать, но дошел я до этого не сразу):
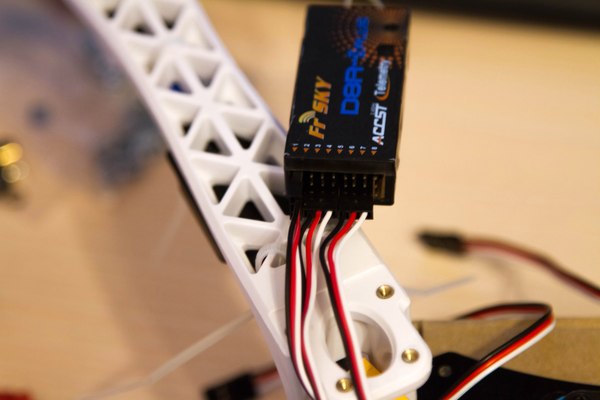
А теперь разъяснение.
Для подключения приемника нам абсолютно не обязательно каждый канал подключать тремя проводами, питание (плюс и минус) достаточно подвести на одном канале, поэтому только первый канал подключен тремя, остальные только по управляющему сигналу.
Далее, на чём я напоролся: на моей аппе расположение каналов было следующим:
1. Throttle - газ;
2. Aileron - крен;
3. Elevator - тангаж;
4. Rudder - рыскание;
а для APM подключение следующее:
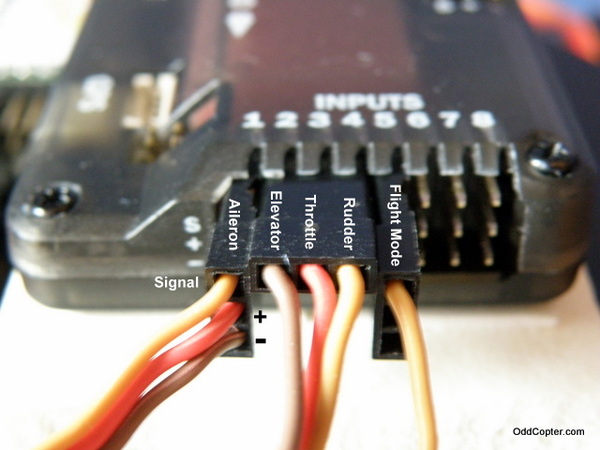
Решил я это банальным перевтыканием проводов (4ый канал воткнул на 3 провода, а 1, 2 и 3 перетасованы). В итоге всё было подключено верно, и я смог выдохнуть =)
Теперь - установка платы распределения питания:
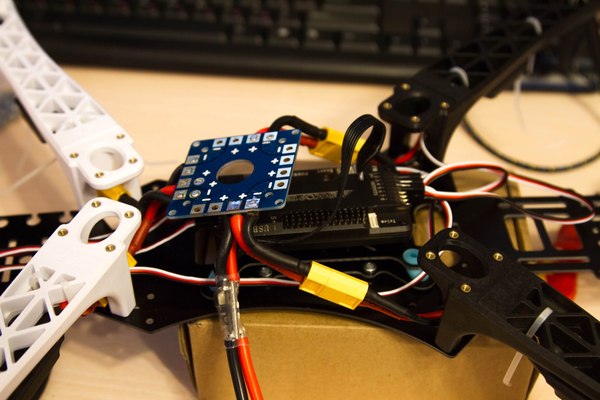
И прикручивание её к крышке корпуса:
Я тщательно проследил за тем, чтобы провода не задевали контроллер, и не давили на него.
Кстати, на этом фото видно шлейф питания для контроллера (уже присоединен к нему).
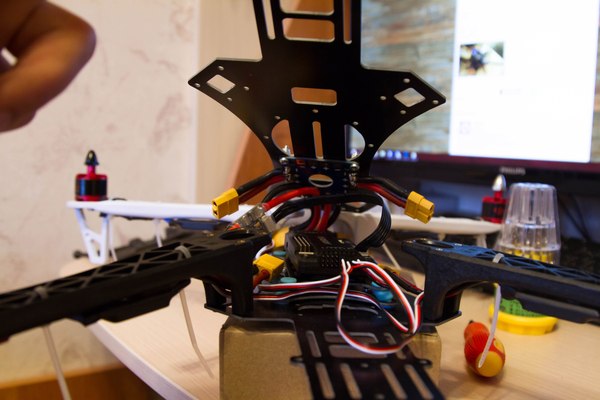
Собственно, окончательно присоединяем моторы к плате (всё остальное на этой стадии уже присоединено).
Далее следовали: установка стоек в хвосте и привинчивание крышки. В принципе, ничего интересного. Провод к аккумулятору был проброшен вдоль контроллера в сторону хвоста коптера.
В общем, в итоге получилось вот это:

Провода от контроллера к приемнику пропустил через отверстие в крышке, к ней же прикрутил стойку GPS. В плане подключения GPS - у него два хвоста, которые вставляются в разъемы GPS и I2C соответственно. Если нужно будет - сфоткаю)
В общем, и целом, квадрокоптер собрался))
Кстати, я планировал, что он будет порядка 1400 грамм массой, оказался 1250! Это та самая ошибка, которой радуешься =)))
Да, впоследствии крышку снимал и вынимал плату распределения питания (я её таки покрыл лаком). В ближайших планах по одному выкручивать винты и, для укрепления резьбового соединения, сажать их на лак для ногтей, позаимствованный у супруги (на фиксатор резьбы жаба давит, а винтики подтягивать, и, тем паче, терять неохота).
Всем спасибо за внимание! Про настройки/калибровки/прошивки расскажу
в следующем посте =)
Искренне ваш,






