Простой удвоитель напряжения на микросхеме NE555
Нашел довольно любопытную схему на основе таймера NE555. Удвоитель напряжения собирается довольно просто, и не требует труднодоступных деталей. По этому отлично подходит новичкам-радиолюбителям.
Нашел довольно любопытную схему на основе таймера NE555. Удвоитель напряжения собирается довольно просто, и не требует труднодоступных деталей. По этому отлично подходит новичкам-радиолюбителям.
Собрал вот такое нехитрое устройство на основе популярной микросхемы NE555. Схема отлично подойдет для практики новичкам, да и в быту сгодится.
Данные видео подойдут для просмотра любителям самодельной электроники
Дисплей от Nokia 5110. Устранение царапин, защита стекла
Мини термопласт. Литьё пластмасс в домашних условиях.
16 канальный ШИМ контроллер PCA9685. Управление сервоприводами
АМПЕРВОЛЬТМЕТР НА ATMEGA8
Графический анализатор спектра Atmega8+LCD
Ситуация мерзкая, щенок разгрыз "орех" наушника, а там вот такая вот штука.
За качество фоток простите, фотографировал на второй "орех".


Можно ли эту платку обратно к динамику прилепить? И как это сделать .
Нет возможности покупать наушники сейчас.
Все спасибо, минусометам можно действовать.

Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.
Всем привет!
Продолжаем нашу чудо-историю про строительство беспилотного пепелаца =)
Прежде всего, я ошарашен) Предыдущий пост увеличил количество моих подписчиков в 183 раза (вас теперь 549, а было трое). Хочу сказать большое спасибо тем, кто заинтересовался, постараюсь оправдать доверие пикабушников.
Также хочу извиниться за большой перерыв между постами - большей частью это вопрос свободного времени.
Да, хочу рассказать небольшую историю о том, как я сподобился именно на сборку, а не на покупку готового коптера под камеру.
На одном из сайтов, где я время от времени бываю, нашел объявление "Тест-драйв DJI Inspire 1". Если что, выглядит он следующим образом:

и стоит бешеных денег (порядка 180к рублей минимум). У меня зачесались руки (интересно же), и я оставил заявку. Через недельку мне позвонили, мы договорились о месте и времени. Опуская ненужные подробности: я попробовал эту вещицу в управлении (да, слушается беспрекословно), порулил камерой, посмотрел стабилизацию. Всё было шикарно. Но было два фактора против: цена (а я всё-таки не миллионер, который может себе позволить такую вещь чисто ради развлечения, и не репортер, зарабатывающий этим деньги, чтобы это было обязательно к покупке) и...у меня появился некоторый азарт, ощущение, что я получу бОльшее удовольствие, если построю сам и сам подниму в небо.
С того дня я начал подбор компонентов.
Ну, подбор я описал в предыдущем посте, так что давайте приступим к объединению этих самых компонентов в летающую машину =)
Начал я с пайки разъемов на регуляторах. В общем, здесь ничего примечательного. Фотка, к сожалению, затерялась, но действовал я так же, как автор вот этого видео (вдохновлялся я именно им):
Отличия в том, что автор видео использовал разъемы "пуля" и для кабелей питания (я брал XT60). Да, и вместо "третьей руки" я использовал старые советские подпружиненные тиски, найденные в закромах. Вещь, скажу я вам, шикарная =)
Затем я решил собирать раму и крепить к ней моторы:


Далее прикрепляем стяжками регуляторы (я крепил снизу, но на деле, где крепить - дело хозяйское):
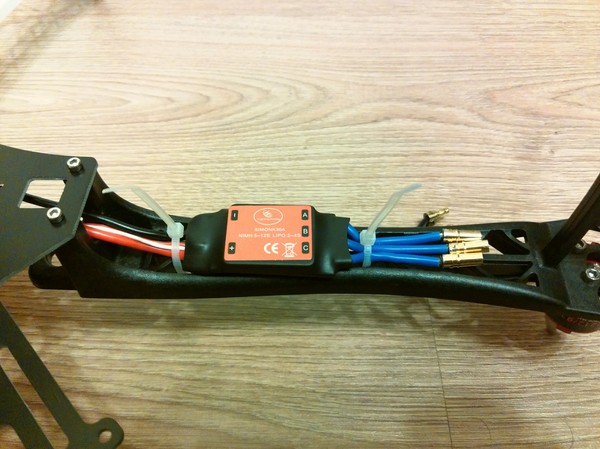
Дальше вышел небольшой затык: коннекторы на моторах были уже обтянуты термоусадкой, а на регуляторах - нет. Сначала была мысль снять родную термоусадку со всех коннекторов и натянуть свою уже поверх соединения, но её уже не хватало. В общем, я добавил её только там, где не хватало (на фото трубка не прогрета):

Тут есть хитрость: отверстия крепежные на моторах (и на раме) расположены не по углам условного квадрата, а по углам ромба. До этого тоже допер быстро, едва не начав ругаться на китайцев=)
Провод пропустил так, чтобы как можно меньше провисал (впоследствии я и его утянул стяжками).
Затем я взялся за пайку платы распределения питания. Инкарнаций было три. На фото первая.
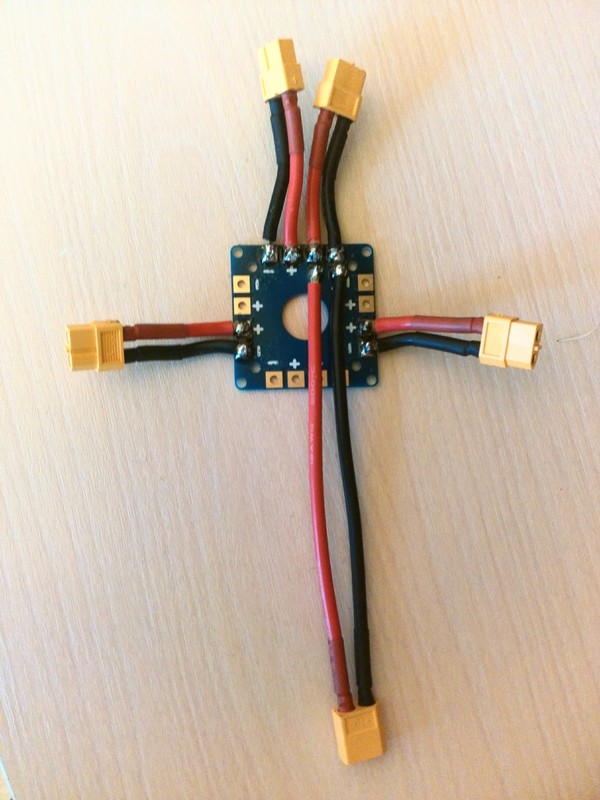
Спаял, думаю - красота! Надо бы лаком покрыть изолирующим!
Хрен-то там...примерил к раме (тут пояснение: я плату реши прикрепить к верхней пластине, но внутри корпуса - и наружу не торчит, и место внутри эффективно используется) - не лезет!
В первой инкарнации боковые провода предполагались для передних моторов, средние - для задних. После обрезки и перепайки плата уместилась, но в той ориентации, в которой находится на фото (средние провода на передние моторы, боковые - на задние).
Третья инкарнация платы родилась так: сижу я, допаиваю...и тут у меня взгляд падает на модуль питания (да, я про него забыл). Модуль посредством паяльника лишился одного из разъемов, затем был припаян непосредственно на плату. На дальнейших фотках можно будет увидеть результат)))
Затем на раму была поселена виброопора для контроллера:
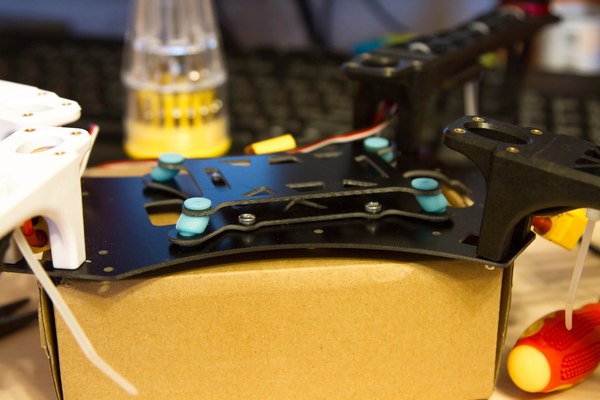
И, собственно, на 3М двусторонку был посажен сам контроллер (на фото вместе с подцепленным приемником):
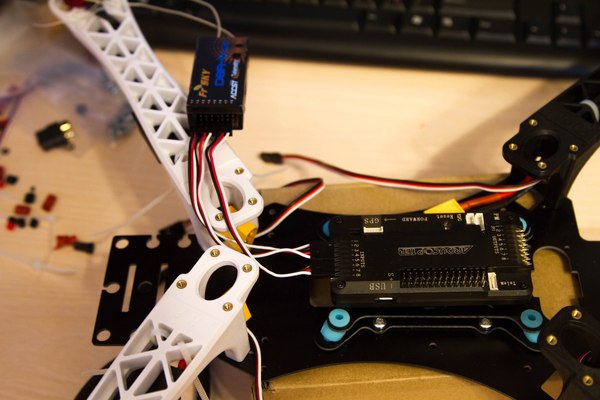
Да, про подключение:
к выходам контроллера подключаем моторы:
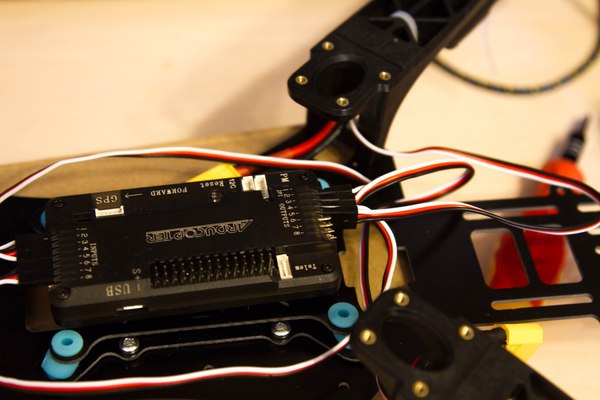
Схема подключения моторов к контроллеру следующая:
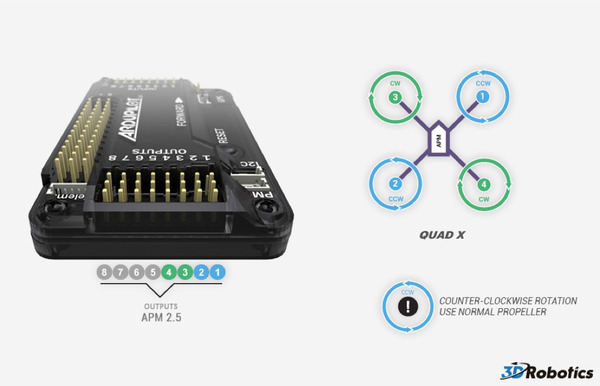
По контактам: нижний/самый наружный - минус, средний - плюс, верхний/внутренний - управляющий.
Подключение приемника (сейчас будет фото, как НЕ надо делать, но дошел я до этого не сразу):
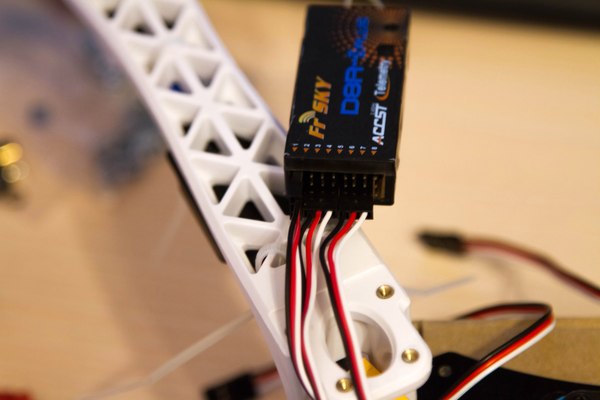
А теперь разъяснение.
Для подключения приемника нам абсолютно не обязательно каждый канал подключать тремя проводами, питание (плюс и минус) достаточно подвести на одном канале, поэтому только первый канал подключен тремя, остальные только по управляющему сигналу.
Далее, на чём я напоролся: на моей аппе расположение каналов было следующим:
1. Throttle - газ;
2. Aileron - крен;
3. Elevator - тангаж;
4. Rudder - рыскание;
а для APM подключение следующее:
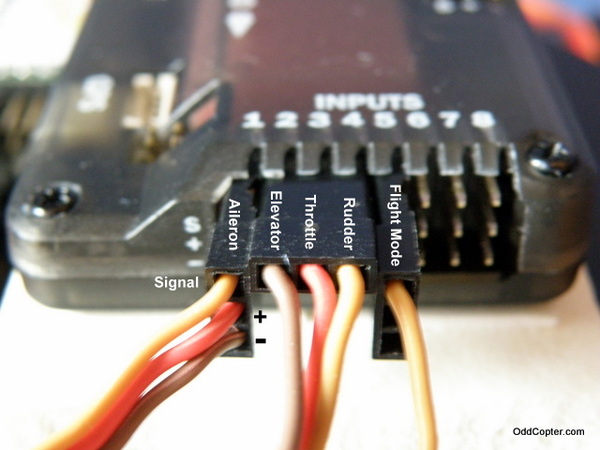
Решил я это банальным перевтыканием проводов (4ый канал воткнул на 3 провода, а 1, 2 и 3 перетасованы). В итоге всё было подключено верно, и я смог выдохнуть =)
Теперь - установка платы распределения питания:
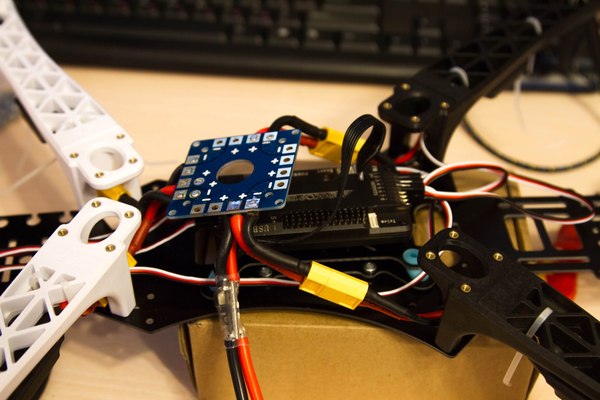
И прикручивание её к крышке корпуса:
Я тщательно проследил за тем, чтобы провода не задевали контроллер, и не давили на него.
Кстати, на этом фото видно шлейф питания для контроллера (уже присоединен к нему).
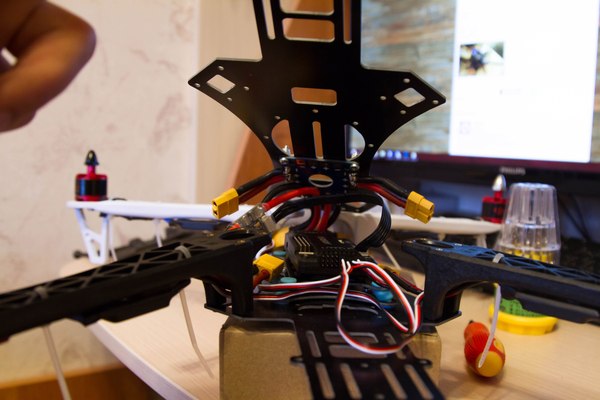
Собственно, окончательно присоединяем моторы к плате (всё остальное на этой стадии уже присоединено).
Далее следовали: установка стоек в хвосте и привинчивание крышки. В принципе, ничего интересного. Провод к аккумулятору был проброшен вдоль контроллера в сторону хвоста коптера.
В общем, в итоге получилось вот это:

Провода от контроллера к приемнику пропустил через отверстие в крышке, к ней же прикрутил стойку GPS. В плане подключения GPS - у него два хвоста, которые вставляются в разъемы GPS и I2C соответственно. Если нужно будет - сфоткаю)
В общем, и целом, квадрокоптер собрался))
Кстати, я планировал, что он будет порядка 1400 грамм массой, оказался 1250! Это та самая ошибка, которой радуешься =)))
Да, впоследствии крышку снимал и вынимал плату распределения питания (я её таки покрыл лаком). В ближайших планах по одному выкручивать винты и, для укрепления резьбового соединения, сажать их на лак для ногтей, позаимствованный у супруги (на фиксатор резьбы жаба давит, а винтики подтягивать, и, тем паче, терять неохота).
Всем спасибо за внимание! Про настройки/калибровки/прошивки расскажу
в следующем посте =)
Искренне ваш,






