Кораблик для рыбалки своими руками (экспериментальный)
Кораблик изначально задумывался для завоза живца. Живец может слететь с крючка или травмироваться при ударе об воду, если закидывать его удочкой. Особенно это вероятно когда вес грузила превышает 50 грамм. И было бы неплохо чтобы кораблик мог завозить немного прикормки.
Кораблик сделан максимально из подручных средств.
Корпус решил сделать из пластика. Вентиляционную белую трубу диаметром 125мм разрезал вдоль, нагрел строительным феном, и расправил. Получился лист пластика.
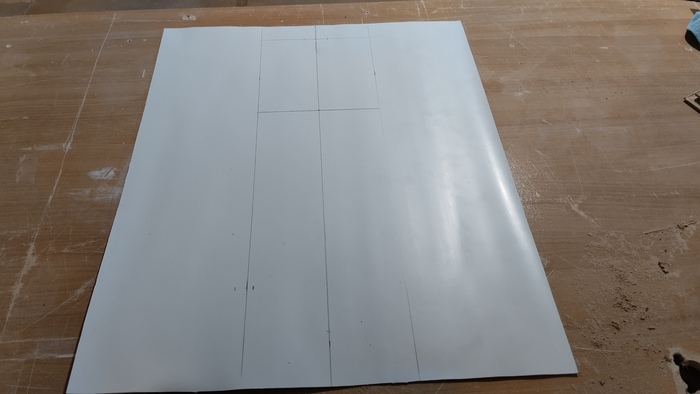
Из картона вырезал лекало( будущая форма корабля, подбиралась на глаз).

По лекалу разметил лист пластика. По линиям сделал надрезы малярным ножом, чтобы согнуть лист в единую форму. Пластик ломался на сгибах (надо было гнуть в обратную сторону). Зафиксировал части малярным скотчем проклеив вдоль. Склеил корпус космофеном с содой, дополнительно проклеил термоклеем.
Фотографий мало поэтому какие есть.
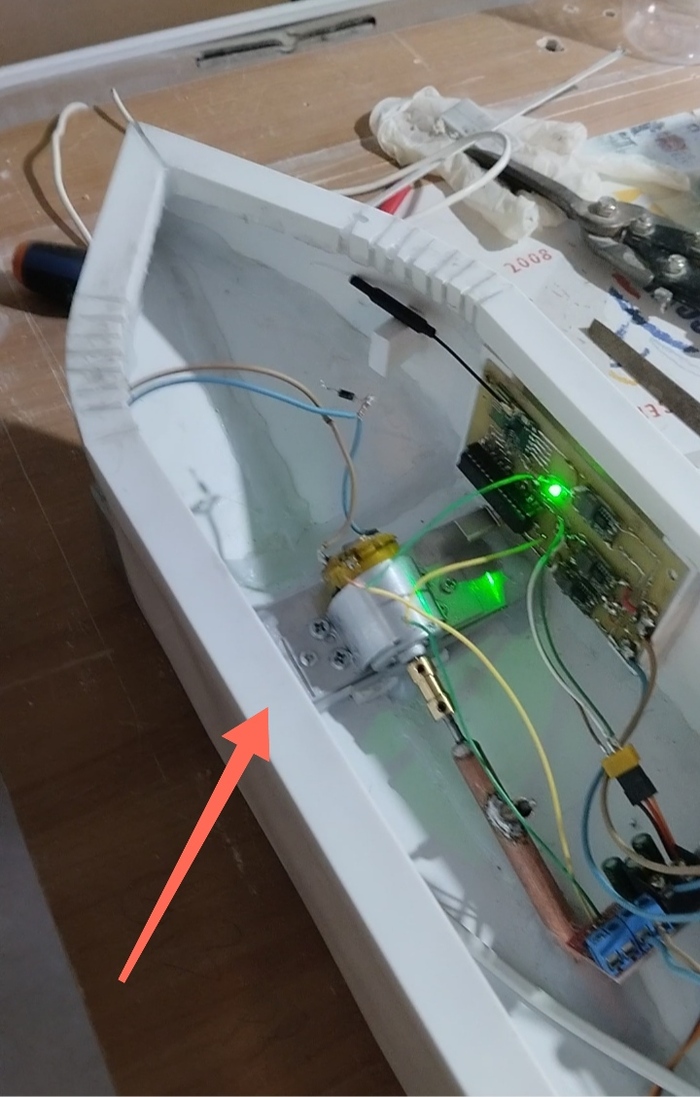
Мотор взял от сломанного фена.
Дейдвуд сделал из медной трубки от кондиционера. Вместо втулок намотал на вал медную проволоку, и запаял. Вал из нержавеющего электрода 3мм. Трубу заполнил литолом.
По краям приклеил кабель-каналы , внутрь их вклеил отрезки пластика, все на горячий клей.
Перевернутый кабель-канал
Перо руля вырезал из алюминиевой пластины. Винт с али экспресса.

Радиоуправление на основе радиомодулей с али jdy-41 и микроконтроллера атмега8. 3 скорости и задний ход. Драйвер двигателя-микросхема ТА6586. Микроконтроллер подает шим сигнал на сервоприводы и драйвер ТА6586.
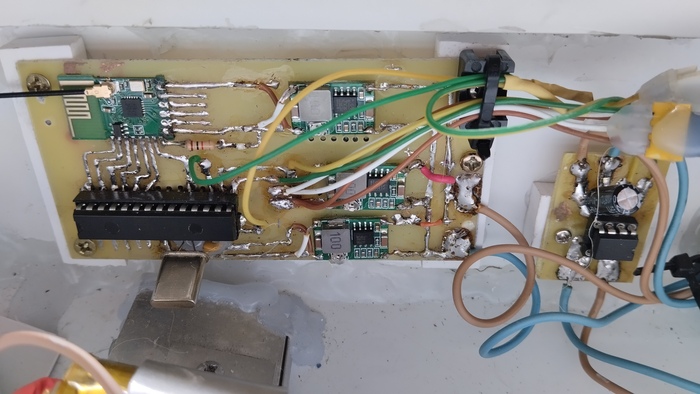
Приемник и остальное.
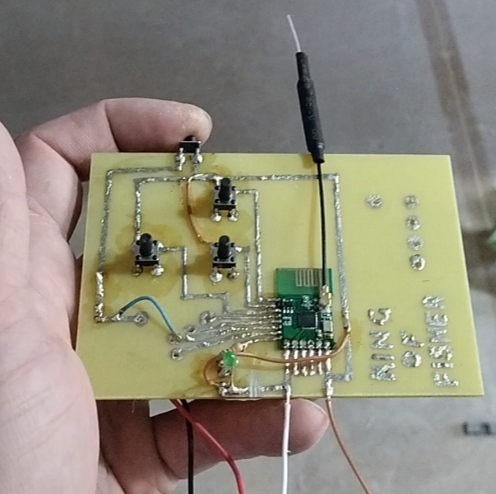
Передатчик.
Аккумуляторная сборка 3s, банки 18650, плата bms.
Живца завез, грузило сдернул удочкой, живец пошёл ко дну. В принципе кораблик свою функцию уже выполняет.
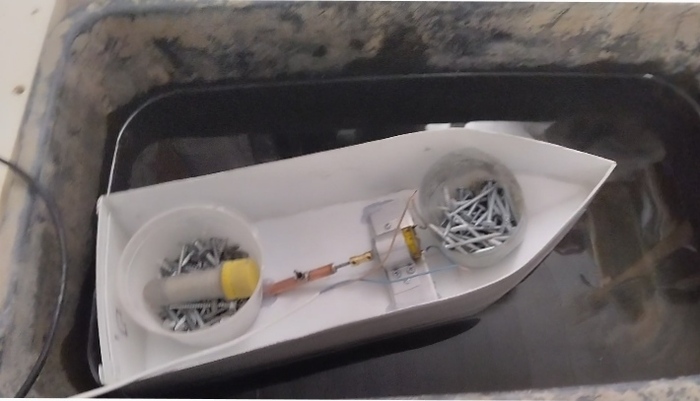
Далее сделал бункер.
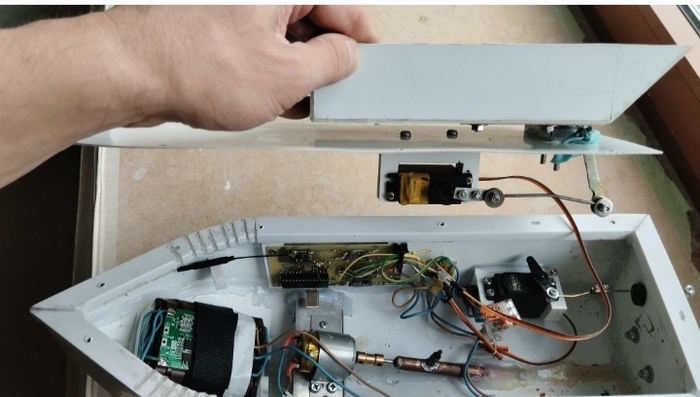
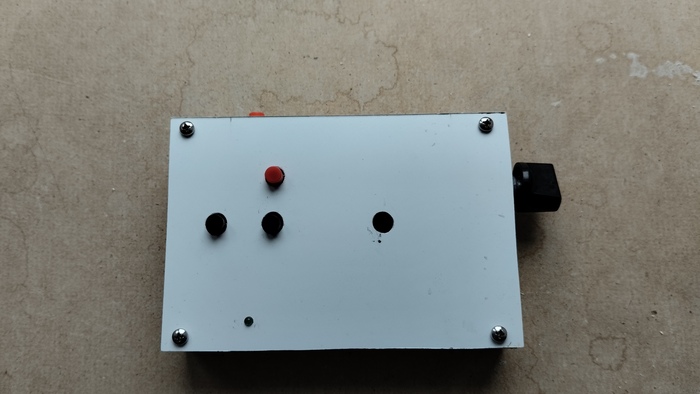
Пульт
Бункер склеен из этого же пластика, коробка для пульта тоже.
Есть поперечный крен в сторону смещения груза, буду делать бункер меньше размером. Вообще кораблик должен быть шире, но я хотел сделать компактный кораблик.