


Combat frame




Показать полностью
4
1
Привет, Пикабу.
Продолжение моего описания проектов с нашей бионического дискорд сервера.
Первая часть тут .https://pikabu.ru/story/bionicheskie_proektyi__chast_1_8958760?utm_source=linkshare&utm_medium=sharing
Там я рассказал про экзоскелет, протез с нейроинтерфейсом и один проект миостимуляции.
Сейчас будет 2 экзоскелета и один протез кисти с миоуправлением!. Ссылка на дискорд будет в самом конце поста. Как обычно
Кроме того напомню про нашу "методичку" в которой можно найти ответы на все вопросы по экзоскелетостроению, нейроинтерфейсам и вообще нашей тематике. Идеальная вещь для новичков!
Пост тут
https://pikabu.ru/story/kratkiy_bionicheskiy_kurs_8912797?utm_source=linkshare&utm_medium=sharing
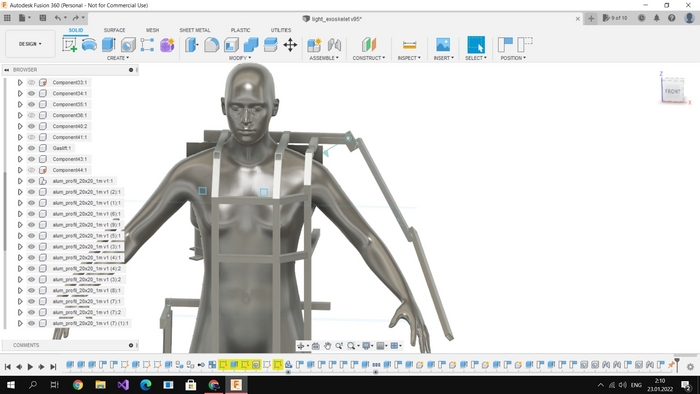
И первый проект моего рассказа это пневматический экзоскелет.

Разработчик Иван Емелин
Иван создает закрытый силовой пневматический экзоскелет для работы в суровых климатических условиях и агрессивной окружающей среды на улице.
Экзоскелет нужен для того чтобы облегчить труд рабочим, а также повысить безопасность при работе и увеличить качество жизни граждан. Экзоскелет позволит с комфортом и безопасностью передвигаться на улице как если бы это бы автомобиль.
Экзоскелет создается в трёх модификациях: средний, тяжести и закрытый . Все эти вариации имеют возможность установки модификаций под нужды тех или иных работ. При этом ставится цель чтоб экзоскелет был максимально простым и дешевым, а также легок в ремонте поскольку важно сделать экзоскелет доступным для большинства людей.
Выбран пневматический тип приводов как максимально простой и дешевый. Создание модификаций осуществляется за счет использования единой скелетной основы и навешиванием поверх необходимых пластин и модулей.
Сейчас макет разобран (но работы по нему начаты и это очень важно) и продолжается отладка 3д модели экзоскелета
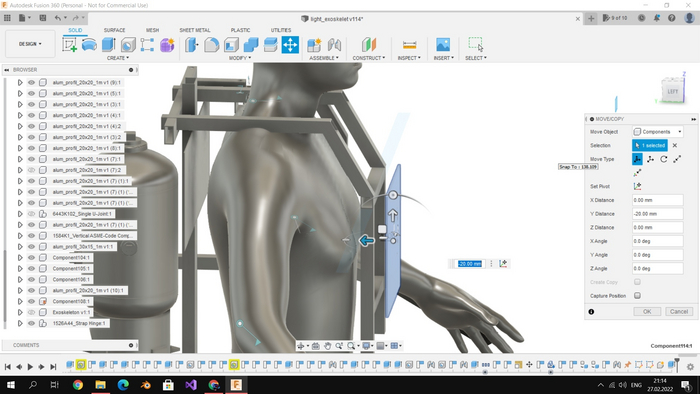
И ещё моделька
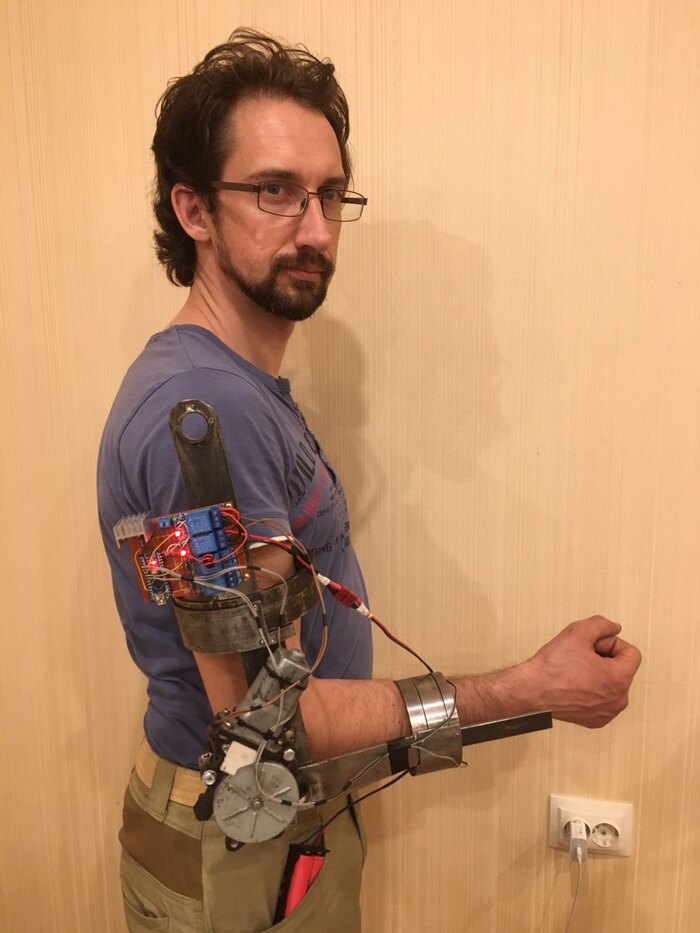
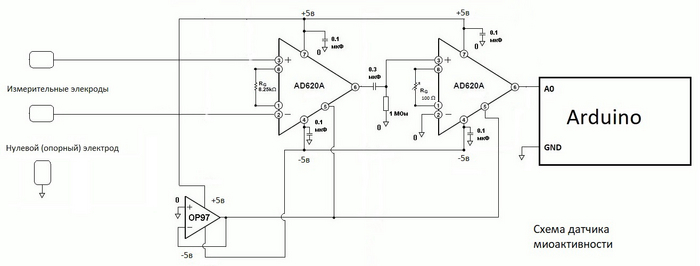
Второй проект бионическая кисть.

Автор наш товарищ с Канады - Роман Ткаченко. У него нет вк так что сослаться не получится.
На данный момент сделан пробный печатный прототип с сервоприводной силовой частью. Особое внимание уделяется биомеханике всей системы.

В качестве системы управления будет использоваться уже ставшая стандартной схема с нейроуправлением. ( Схему прикладываю. ) Роман решил также поделиться печатной платной для этой схемы. Это значительно сократит время производства т.к. схема требует большой точности в создании.
Проект в easy EDA
И ещё один экзоскелет , но теперь уже активный!
Разработчик этой активной модели Олег Пасечко
Задумывался экзоскелет для участия в «экзофайте», поэтому в основе железяки 4-5 мм. Основная задумка - максимально повторить все возможные движения человека (сгибания, повороты, наклоны, вращения и т.д.)
Приводы для движения электрические (мотор-редуктор). Сейчас используются моторы от стеклоподъемников, как самые доступные и дешёвые. По завершению прожекта. Планируются бесколлекторники с циклоидальным редуктором.

Закончить проект планируется в двух вариациях.
1 быстрый не уступающий человеку в скорости и хорошо защищённый.
2. Не быстрый, не очень защищённый, но Очень сильный 💪🏻.
На данный момент стоит задача собрать весь скелет с электро-суставами и пофиг как это будет выглядеть)) И отработать систему управления. В ближайшей перспективе это а)поворот руки в плече (в районе бицепса/трицепса); б) собрать плечевой сустав; в) соединить руку,спину, поясницу в цельную конструкцию.
небольшое видео с тестом.Спасибо за внимание. Подписываемся и всё такое.
И наш дискорд где можно про все это поговорить и что то спросить у разработчиков!
Костюм Exopulse Mollii может улучшить подвижность людей, перенёсших инсульт или болезнь Паркинсона, с помощью Fititout Mobility с использованием низкочастотной электростимуляции
В рамках создания комплекса экзокисти под управлением нейрокомпьютерного интерфейса написал прошивку для Arduino Mega, которая через CAN-контроллер управляет серводвигателем RMD-X8 Pro, приводящим в движение механизм экзокисти. Модель экзокисти создавали наши студенты, прошивка представляла собой скетч, вырезанный из другого проекта, двигатель мог управляться только с помощью джойстика. Причем джойстик при движении вперед раскручивал двигатель вперед, а при отклонении джойстика в обратную сторону постепенно останавливал его и начинал неконтролируемые движение в обратном направлении. При остановке джойстика движение также не прекращалось. Контроля углов вращения не было.

Особенность этого двигателя в том, что при вращении вала двигателя на 360 градусов редуктор примерно в четыре раза уменьшает угол поворота, а энкодер двигателя контролирует вращение только на 360 градусов по валу двигателя, что фактически является только четвертью полного оборота. При прохождении отметки в 360 градусов энкодер сбрасывался в ноль и считал данные заново.
Для двигателя есть настроечная программа, которая работает по протоколу serial-232, имеются варианты интерфейса двигателей с RS485 у которого больше возможностей, чем у CAN, который через один датафрейм может передать максимум 8 байт. В тестовой вкладке программы настройки примеры интерфейса управлением двигателя работают не так, как хотелось бы, но зато оказалось, что там есть команды, не описанные в документации. При использовании тестовых режимов программа указывает, какие данные она пересылает в датафрейме, и стало видно, что кроме команд позиционирования А1-А6 также используются команды А7 и А8, и последняя команда как раз подошла для нашей задачи.
Сейчас прошивка реализована следующим образом: от джойстика или от внешней управляющей программы (в итоге это будет нейрокомпьютерный интерфейс) приходит команда, что нужно выставить угол экзокисти в заданное значение. Прошивка определяет текущее положение двигателя, если угол больше, то подается команда на движение в обратную сторону, положение кисти постоянно контролируется.
Энкодер двигателя очень чувствительный – он позволяет позиционировать двигатель с точностью до сотых долей градуса. При команде на остановку двигатель по инерции проходит еще несколько сотых градуса, и без усреднения данных положения энкодер постоянно пытался бы вернуть двигатель точно в заданное положение, опять бы проскакивал его по инерции и т.д., что вызывало бы постоянное дерганье. Усреднил показания позиции, разделил их на 100 и отбросил дробную часть, чтобы сравнивались только целые градусы углов, поскольку точность в 1 градус вполне достаточна, а лишних дерганий удается избежать.
Добавил в прошивку подстраховку, что в случае неисполнения двигателем команды на остановку она будет посылаться снова и снова, пока двигатель не остановится. Кроме того, есть команда на аварийное отключение двигателя, если что-то идет не так.
Также добавил в прошивку работу с внешними интерфейсами через последовательный порт в формате JSON, через которые прошивка будет получать команды от внешней управляющей программы. На Java написана ретранслирующая программа, которая принимает пакеты по протоколу UDP, пересылает их в Ардуино по serial, с последовательного же порта получает ответ от платы и пересылает его обратно в управляющую программу высокого уровня по UDP. Это необходимо для обратной совместимости со сторонним программным обеспечением.
Привет, Пикабу!
Мексиканский экзоскелет мы уже видели. Африканский тоже.
А вот индийский ещё нет..

Разработчика зовут Вимал Говинд Маникандан (Vimal Govind Manikandan).По словам Маникандана, его костюм вдохновлён фильмом «Аватар» режиссёра Джеймса Кэмерона. Сам экзоскелет весит около 100 килограммов и может поднимать вес до 150 килограммов.
Сборка устройства обошлась команде Маникандана всего в 750 долларов при том, что самые дешёвые аналоги стоят десятки тысяч долларов. У костюма есть два существенных недостатка: из-за большого веса в нём невозможно быстро передвигаться, а питания от батарей хватает только на небольшое время. Работает он на пневматике.
В апреле по сети широко разошёлся снимок, изначально опубликованный в китайском сервисе Weibo. На нём один из местных доставщиков еды использует экзоскелет, чтобы взять сразу три контейнера вместо одного.
Некоторые блогеры заподозрили фотошоп, однако позже в сети появилось и видео — его опубликовала китайская видеоблогерша Наоми Ву. На нём видно, как курьер тестирует устройство, пока за ним наблюдают коллеги с символикой «Макдоналдс».

Ранее китайская газета South China Morning Post сообщала, что во время пандемии курьерская доставка продуктов стала критически важной для местного населения. И владельцы этих видов бизнеса используют бум, активно вкладываясь в новые технологии доставки и развитие электронной коммерции. Помимо экзоскелетов они планируют также использовать дроны и предиктивные алгоритмы, помогающие более точно распределять нагрузку на курьерскую сеть.





