

Когда решил вздремнуть за рулём.
Чтобы не произошло во второй части, не допускайте первую.
Чтобы не произошло во второй части, не допускайте первую.
Водитель сможет передать контроль электронике, когда автомобиль окажется на трассе.
Комплекс ProPILOT впервые сможет вести автомобиль самостоятельно, не требуя контроля со стороны водителя, сообщает Nissan. Правда, с единственной оговоркой — эта функция будет работать только во время поездки по магистрали. Использовать автопилот нового поколения (им оснастят модель Skyline для внутреннего рынка Японии) нельзя при двустороннем движении, на извилистых дорогах и в момент подъезда к пунктам оплаты проезда на платных дорогах.
Чтобы активировать автопилот, предварительно необходимо построить маршрут с помощью штатной системы навигации. Водитель сможет передать контроль электронике, когда автомобиль окажется на трассе. Система способна удерживать машину в полосе, а также совершать обгоны и прочие маневры. Правда, здесь без контроля со стороны человека не обойтись. ProPILOT должен уведомлять водителя световыми и звуковыми сигналами, что ему нужно взяться за руль и включить поворотники — автопилот начнет маневрировать только при этом условии.
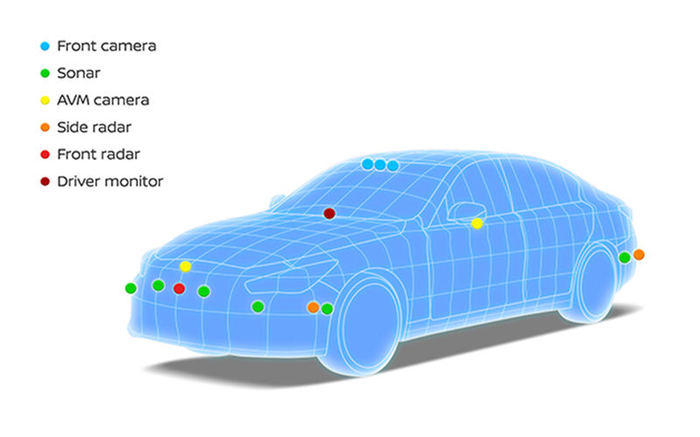
За автопилот отвечает сложная система, включающая в себя камеры, сонары, радары, GPS-датчики и 3D-карты высокого разрешения. И несмотря на то, что ProPILOT позволяет снимать на трассе руки с руля, электроника проконтролирует, смотрит ли водитель на дорогу: отвлекаться нельзя!
Система ProPILOT уже используется на ряде моделей Nissan, но подготовленная для Skyline модификация — самая совершенная на сегодняшний день.
Источник
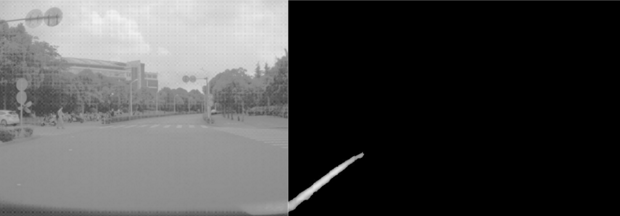
Система адаптивного круиз-контроля Tesla Autopilot может некорректно распознавать точки на асфальте, принимать их за элементы дорожной разметки и сворачивать, чтобы не пересекать несуществующую линию разметки, в том числе выезжая на встречную полосу, выяснили исследователи в области информационной безопасности из китайской компании Tencent. Кроме того, исследователям удалось активировать стеклоочиститель автомобиля, показав его камере специальные изображения, а также получить удаленный доступ к бортовому компьютеру и управлять поворотом с помощью игрового геймпада, рассказывают исследователи в блоге Tencent Keen Security Lab. Кроме того, авторы опубликовали статью с подробным описанием экспериментов.
На сегодняшний день во многих системах компьютерного зрения применяются нейросетевые алгоритмы, показывающие высокую точность распознавания объектов разных классов. Однако у применения нейросетей для работы с изображениями есть и недостатки, в частности, многие исследователи из этой области обращают внимание на уязвимость нейросетей к состязательным примерам (adversarial examples). Эти примеры представляют собой входные данные, которые специально модифицированы таким образом, чтобы заставить нейросеть некорректно распознать объект на них. Особенность этих данных также заключается в том, что, как правило, для человека они либо практически неотличимы от нормальных данных, либо наоборот — представляют собой хаотичный набор пикселей, в котором человек не распознал бы конкретный образ.
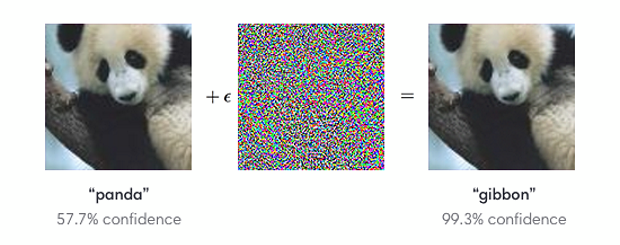
Наглядный пример атаки с использованием состязательного примера
Угроза состязательных примеров может казаться достаточно малой, тем более, если учитывать, что обычно они работают в ограниченном диапазоне условий. Тем не менее, многие исследователи считают эту угрозу реальной и серьезной, потому что алгоритмы компьютерного зрения применяются во многих сферах, в том числе и ответственных, таких как беспилотный транспорт для перевозки людей. Исследователи из китайской компании Tencent проверили систему автоматизированного вождения Tesla Autopilot на ее уязвимость к состязательным примерам, и обнаружили ее некорректное поведение в некоторых условиях.
В своем исследовании специалисты выбрали не стандартный подход, при котором алгоритм получает модифицированные данные в цифровом виде, а решили приблизить ситуацию к реальности и создавали состязательные примеры в реальном мире, которые затем автомобиль воспринимал через камеры. Исследователи использовали автомобиль Tesla Model S 75 с аппаратным обеспечением версии Autopilot 2.5 и программным обеспечением версии 2018.6.1. Стоит отметить, что система Autopilot в автомобилях Tesla не является полностью автономной и требует от водителя держать руки на руле и перехватывать управление в сложных ситуациях, поэтому ее принято классифицировать как систему автономного вождения второго уровня автономности по классификации SAE.
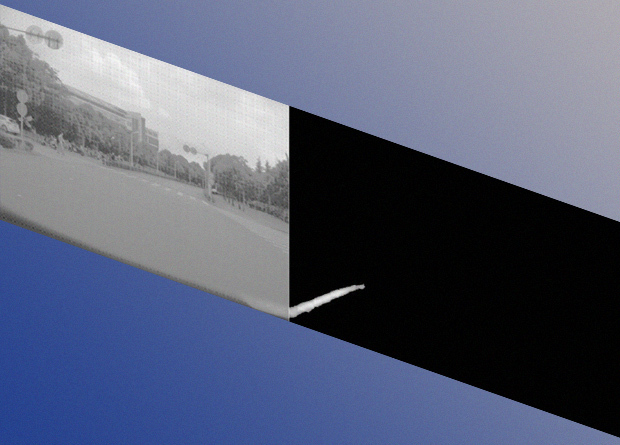
Авторы добились трех основных результатов в своей работе. Главный из них — это обман системы распознавания разметки. Исследователи провели два типа экспериментов и смогли как заставить алгоритмы не распознавать существующую линию разметки, так и обнаруживать несуществующую. В первом случае авторы добавляли к настоящей сплошной линии разметки белые пластыри, которые располагались неравномерно. В таком случае, в зависимости от расположения наклеек, автомобиль мог видеть часть полосы или не видеть ее вовсе. При этом исследователи отмечают, что в реальной жизни водитель вряд ли бы не заметил такую необычную разметку.
Пример обнаружения несуществующей линии разметки
Второй эксперимент показал более опасную уязвимость. В нем исследователи нанесли на асфальт три квадратных наклейки, выстроенные в линию таким образом, что эта виртуальная линия проходит диагонально по текущей полосе движения. Во время эксперимента алгоритм распознавания разметки принял эти квадраты за линию и, проигнорировав левую линию разметки, свернул на встречную полосу движения.
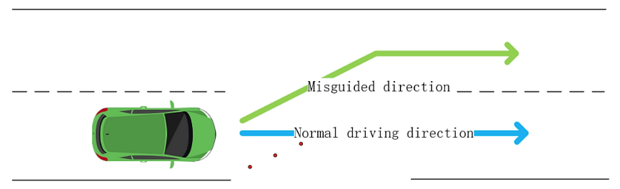
Поведение автомобиля при наличии квадратных наклеек на асфальте
Кроме того, авторы показали, что специальные состязательные изображения, показываемые на мониторе перед автомобилем, могут заставить его включать стеклоочиститель. Такой эффект обусловлен тем, что у Tesla Model S есть функция распознавания дождя по изображению с камеры, и состязательные примеры заставляют алгоритм обнаруживать такую погоду на данных с камеры. Этот эксперимент авторы также повторили в цифровом виде, модифицируя входные данные с камеры без применения внешнего монитора. Наконец, в последнем эксперименте авторы показали, как уязвимость в программном обеспечении Tesla позволяет злоумышленникам получить доступ к управлению углом поворота руля и управлять им с помощью игрового контроллера. Стоит отметить, что эта уязвимость уже устранена в актуальной версии программного обеспечения автомобилей Tesla.
Авторы отмечают, что Tesla ответила на выводы их исследования. В случае с включением щеток стеклоочистителя компания заявила, что использование монитора прямо перед автомобилем не является реальным сценарием, который может быть применен на практике. Аналогичным образом специалисты компании ответили на обвинения в некорректном распознавании разметки, ответив, что водитель должен быть всегда готов перехватить управление у системы автопилота, воспользовавшись рулем или педалью тормоза.
Ранее владельцы Tesla уже сталкивались с проблемами распознавания разметки системой Autopilot. К примеру, в прошлом году после смертельной аварии с участием Tesla Model X владельцы других автомобилей Tesla воспроизвели некорректную работу системы Autopilot, о которой говорили родственники погибшего. Их эксперименты показали, что в некоторых случаях система может некорректно интерпретировать частично стертую линию разметки и направить автомобиль в барьерное ограждение.

В Калифорнии пьяный водитель Tesla спал в машине, пока ехал домой на автопилоте.
Машину остановили калифорнийские копы, и теперь мужчине грозит не только лишение прав, но и тюрьма.
45-летний член Комитета по городскому планированию Александр Самек решил положиться на современные технологии и немного перебрал с алкоголем. После того как вечеринка закончилась, Самек сел в Tesla Model S и задал маршрут до дома. Выставив автопилот в активный режим, Самек заснул прямо за рулем.
Электрический автомобиль, который двигался по шоссе с соблюдением всех правил на скорости чуть более 110 километров в час, заметили полицейские, однако на требования остановиться водитель реагировать не стал. Поравнявшись с машиной, сотрудники полиции поняли, что пилот автомобиля спит прямо на водительском сиденье.
Используя датчики движения Tesla Model S, водителя "прижали" к обочине, достали из машины и попросили "подуть в трубочку". Положительный результат гарантировал электромобилю место на специальной стоянке, а над водителем в ближайшее время состоится суд.
https://life.ru/t/наука/1174751/v_kalifornii_pianyi_voditiel...
https://www.sfgate.com/crime/article/Drunk-driver-slept-whil...
«КамАЗ» представил беспилотный электробус под названием «ШАТЛ» — он умеет разгоняться до 110 км/час.
КАЗАНЬ, 12 июн — РИА Новости. Ведущий российский производитель грузовых автомобилей "Камаз" во вторник продемонстрировал в Казани прототип беспилотного электробуса "ШАТЛ" (широко адаптивная транспортная логистика), тест-драйв которого провёл президент Татарстана Рустам Минниханов.
Разработанное ПАО "Камаз" совместно с ФГУП "НАМИ" транспортное средство особо малого класса "ШАТЛ" предназначено для передвижения по дорогам с твёрдым покрытием с использованием данных цифровых карт, систем навигации и органов технического зрения.
Заместитель генерального директора ПАО "Камаз" по развитию Ирек Гумеров сообщил, что электробус способен развивать скорость до 110 километров в час, однако поскольку в РФ в настоящее время отсутствует законодательство, регулирующее движение беспилотного транспорта, скорость движения электробуса при демонстрации составила 10 километров в час.
Гумеров отметил, что беспилотный транспорт даже более безопасен, чем под управлением человека, потому что робот не ошибается, всегда внимателен, но, с другой стороны, его ещё надо обучить. "Здесь очень четко нужно сфокусироваться, где он может использоваться. Мы видим уже, это изделие может использоваться сегодня в закрытых территориях: выставочных комплексах, парковых зонах. Тот регламент, который мы сегодня нарабатывали, можно развить и уже сегодня использовать, поэтапно находить ниши", — сказал он.

© РИА Новости / Максим Богодвид
Замгендиректора "Камаза" подчеркнул, что главное ограничение для развития беспилотного транспорта сегодня – законодательное. "Уверены, что все партнёры уже за 2020 годом смогут это сделать в какой-то мере, но законодательство и общество не готовы. Поэтому консенсус-прогноз на сегодня мирового автомобилестроения – это где-то порог 2030 года, где полностью автономно, где человек не вмешивается. Но в закрытых территориях, конечно, будет появляться, расширяться. К 2030 году полный перелом наступит", — уточнил Гумеров, говоря о перспективах появления беспилотного транспорта на дорогах РФ.
Заместитель генерального директора по стратегическому развитию ФГУП "НАМИ" Алексей Гогенко отметил, что компания уже два года тестирует беспилотные транспортные средства. Очень важная задача сегодня, по его словам, – создать инфраструктуру для таких беспилотных автомобилей. Гогенко подчеркнул, что в основе данного беспилотного электробуса лежит открытая технологическая платформа, которая легко может быть адаптирована под любые логистические цели. По его словам, технология, конечно, требует обкатки, доработки, испытаний, но за ней будущее. "За рамками 2020 года она станет серийной", — подчеркнул он.
Беспилотник КАМАЗ-1221 "ШАТЛ" осуществляет остановку для посадки и высадки пассажиров на остановочных пунктах, определенных службой движения и выбираемых пользователями из предложенного перечня на маршруте. Интерфейс позволяет пассажиру управлять системой открывания дверей, системой выбора остановочного пункта для высадки, остановкой по требованию, аварийной остановкой, вызовом помощи, ручным открыванием дверей, а также использовать USB-порт для зарядки электронных устройств. Масса транспортного средства максимально оптимизирована: кузов выполнен из композитных материалов, рама изготовлена с использованием алюминиевых материалов.
Источник:
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi
Не прошло и года с тех пор, как человек разбился в своей Тесле на Автопилоте, и снова приходят грустные новости. В штате Аризона беспилотный прототип Uber насмерть сбил женщину.

Вот что известно:
1. Прототип на базе Volvo XC90 двигался в режиме автономного движения со скоростью около 60 км/ч.
2. Женщина на велосипеде внезапно оказалась на проезжей части в значительном удалении от пешеходного перехода. В машине находился инженер-испытатель, но он не успел что-либо предпринять.
3. Предварительное расследование пришло к выводу, что вины водителя (или машины?) Uber в ДТП нет — избежать столкновения было практически невозможно.
В первую очередь, безусловно, жаль погибшую. Здесь нелишне будет вспомнить, что ПДД написаны не только для водителей, но и для пешеходов (написаны, между прочим, кровью и тех, и других). Каким бы ни был водитель — неопытным, опытным или вовсе роботом — пешеход всегда может создать ситуацию, когда ДТП неизбежно. Не делайте так.
Этот прототип я снял в декабре 2016 года в Сан-Франциско — первый (и последний) день испытаний в Калифорнии. Как видно по этим двум фото, за полтора года после первых полевых испытаний в плане «железа» ничего не изменилось — машины те же, сенсоры те же. Это логично, ибо прогресс идёт преимущественно в области накопления данных и обучения.

Этот инцидент поднимает интересные вопросы, на которые однозначных ответов пока нет.
Да, пешеход сам виноват и избежать столкновения было практически невозможно. Однако мы ожидаем от искусственного интеллекта именно что сверхчеловеческих способностей — увидеть за сотню-две метров, предвидеть, перестраховаться, безопасность прежде всего. В идеальном мире погибнуть под колёсами беспилотника должно быть так же реально, как отравиться угарным газом в салоне электромобиля.

Как вы знаете, я всегда на стороне технического прогресса, но в данном случае не могу полностью встать на сторону Убера. Как и в прошлый раз, когда беспилотник попёр на красный, становится совершенно очевидно — Uber бежит впереди паровоза, слишком поспешно выводя в реальный мир сырые технологии.
Слепо защищать пешехода тоже сложно — проезжая часть всё же предназначена для машин, а не для манёвров с «сюрпризами».







