

Мягкие активные экзоскелеты
В последние годы эволюция роботов подошла к черте водораздела, породив две уникальные ветки развития: мягкую и жёсткую робототехнику.

мягкий робот
С экзоскелетами произошло то же самое. Так называемый «жёсткий» экзоскелет стал своеобразным эталоном для большинства приборов этого класса. Он повышает силу человека, позволяя поднимать тяжёлые грузы и снимая избыточное напряжение с костей и связок. Разумеется, экзоскелеты вызывают большой интерес у спасателей, пожарных и медиков, которые работают в условиях больших нагрузок. Экзоскелет, в первую очередь, «заточен» под биомеханику человеческого тела и должен работать в плотной интеграции с опорно-двигательным аппаратом носителя. Эта черта выступает основным ограничением для экзоскелетов, но в ней же сокрыт и потенциал их развития.
Контакт тела с плотной деталью экзоскелета быстро вызывает конфликт между ней и живыми тканями. Обойти его можно двумя путями: использовать биологически инертные и нетравматические материалы или же физически разделить человека с роботизированной периферией. Первый подход неплохо показывает себя в деле бионического протезирования конечностей. Второй использовала научная группа, которая занималась разработкой «третьей» руки.
Но кроме силы существуют и другие параметры. В первую очередь — выносливость. Во вторую — ловкость. А вот с ловкостью у «жёстких» экзоскелетов большие проблемы. Сложная система рычагов и приводов, характерная для классического подхода к носимой робототехнике, мало напоминает одежду.
Мягкий экзокостюм не наделяет человека сверхъестественной силой. Вместо этого он поддерживает работу врождённой мускулатуры, позволяя экономить энергию во время марш-бросков и выполнения стереотипных движений. Вместо прибавки к силе он повышает выносливость человека. Функционирование устройства осуществляется по интуитивно понятному принципу. Его суть — помощь в подошвенном сгибании и разгибании голеностопного сустава, а также аналогичных действиях по отношению к бедру.
В биологическом организме движителем выступают мышцы. Сокращаясь, они тянут сухожилия, а те, в свою очередь, передают усилие на кость. Интересен факт, что наши рычаги не слишком эффективны. Точка на кости, где «сидит» сухожилие, расположена вдали от дистального конца руки или ноги. Тянуть рычаг за короткое плечо — значит проиграть в силе. С другой стороны, такая особенность анатомии даёт ощутимую прибавку к скорости движения.
Именно поэтому все наземные животные адаптированы к отталкиванию от поверхности. Но тут возникает новый вопрос: почему человек не опрокидывается во время ходьбы? Посудите сами — наш центр масс расположен достаточно высоко. Во время движения мы переносим точку опоры, регулярно оказываясь в состоянии контролируемого падения.
Если рассматривать стоячего человека как математический маятник, то у него будут две точки равновесия — верхняя и нижняя. Точки равновесия можно описать как состояния системы с наименьшей энергией. При этом равновесие в верхней точке будет неустойчивым и нарушится от любого возмущения. Или нет? Выяснить это наверняка помогает маятник Капицы. Этот прибор поражает своей неочевидностью. Груз, прикреплённый к нерастяжимой спице, соединён с вибрирующим подвесом. В случае цикличных вибраций подвеса по направлению вверх-вниз наш грузик не просто выталкивается в возвышенное положение — он как бы застревает там
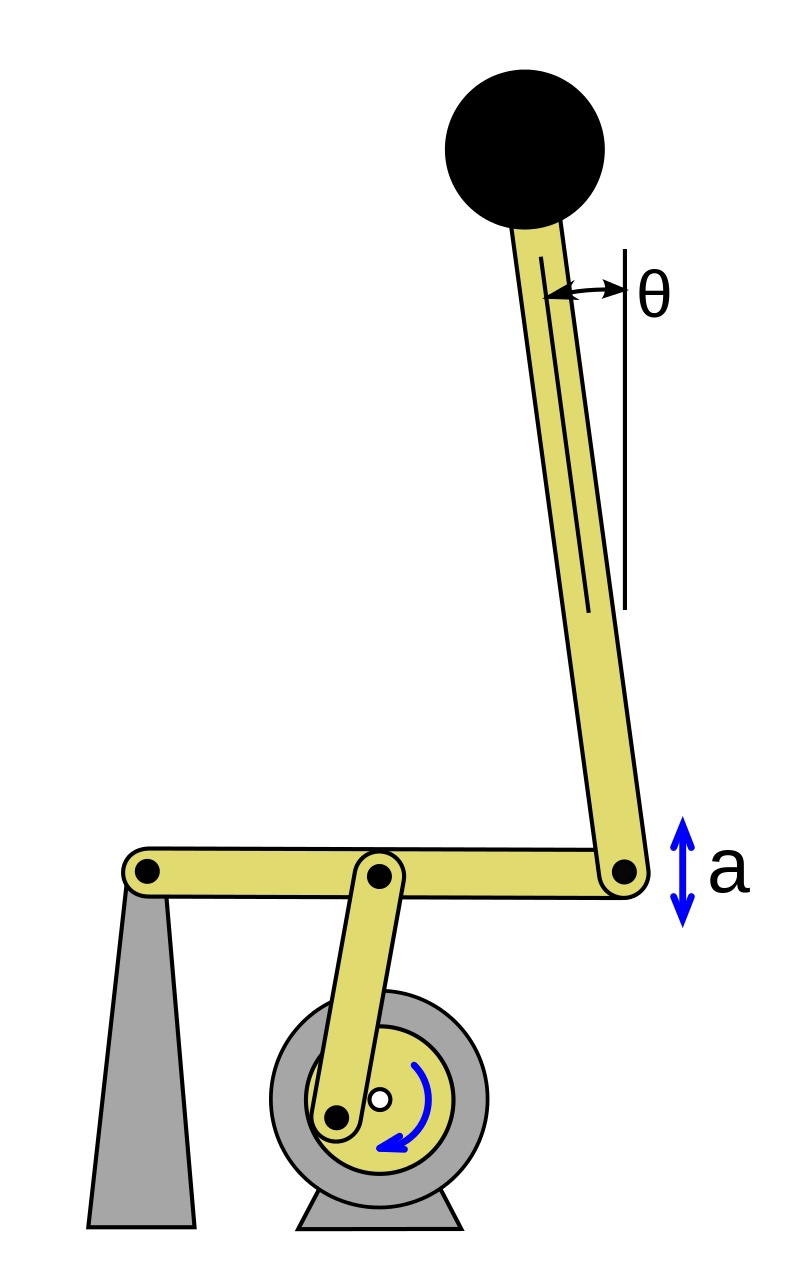
Вибрационная механика родилась в тот момент, когда академик Капица сумел разработать математический аппарат для описания уже известных колебательных процессов.Человеческое тело приобретает устойчивость во время ходьбы за счёт колебательных движений голеностопного сустава. Во время шага или бега любой из нас напоминает перевёрнутый маятник, чей центр находится около стопы, а подошвенная поверхность играет роль вибрирующего основания. Центр маятника не стоит путать с центром массы. Наше прямохождение развивалось в ходе долгих эволюционных процессов, но даже они так и не смогли решить проблему возможного опрокидывания человека.
Вернёмся к экзокостюму. Исходя из принципов биомеханики ходьбы, учёные получили возможность прямо влиять на перевёрнутый маятник и даже усиливать его конструкцию.
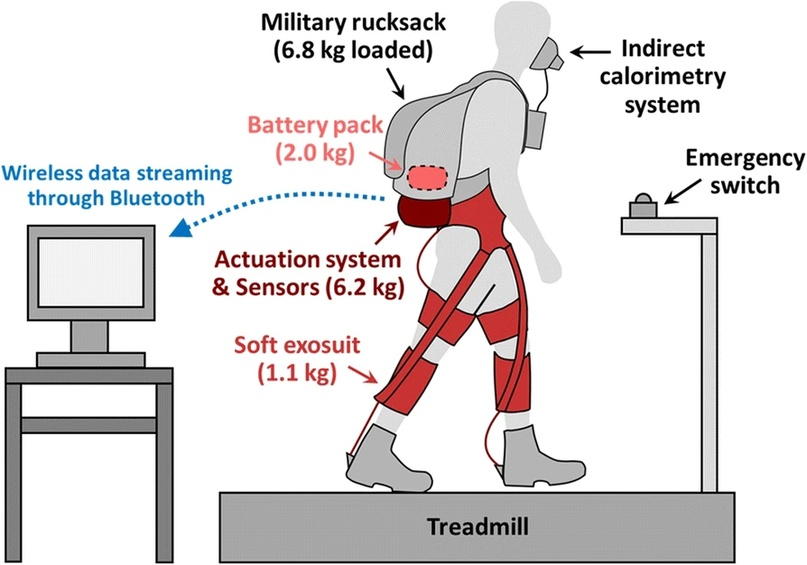
Устройство состоит из двух критически важных блоков: системы срабатывания и передающего комплекса, который транслирует усилие на приборы-исполнители. Первый блок установлен в рюкзаке армейского образца. Тросы Боудена выступают проводником, через который экзокостюм развивает необходимое усилие.
Контроллер функционирует пошагово. Он разбивает программу движения на комплекс итеративных команд. Так обеспечивается многосуставная помощь для сгибания подошвы и разгибания бедра во время шага. Этот метод хорошо показывает себя, когда усилие формируется в соответствующий момент. Для этого был разработан весьма прогрессивный метод онлайн-мониторинга, о котором будет рассказано позже.
Контроль эффективности
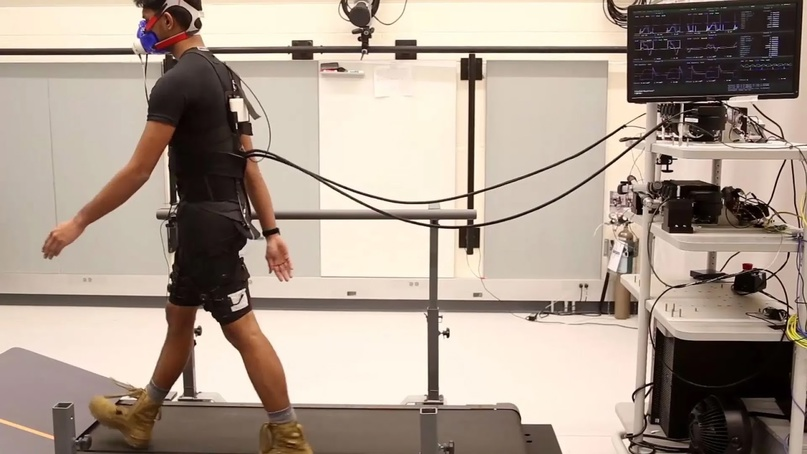
Как определить реальную эффективность костюма? Ответ простой: замерить метаболические затраты человека с этим устройством и без него. Для этого испытуемым предложили идти по беговой дорожке со скоростью 1,5 м/с, неся на плечах рюкзак весом 6,8 килограмм.
Результаты оказались интересными. Начнём с того, что в подобных исследованиях существует множество «подводных камней». Главным, но отнюдь не единственным выступает индивидуальная анатомия. Все люди разные, хоть и относятся к одному биологическому виду. Кто-то экономно расходует энергию, а кто-то прожигает питательные вещества, как мартеновская печь. Следовательно, константа, выведенная для конкретного добровольца, может оказаться мало применимой к другому!
Метод онлайновой настройки параметров позволяет нивелировать этот негативный эффект и динамически адаптировать экзокостюм под потребности конкретного носителя. Для начала исследователи строили положительную карту возможностей. Она описывает спектр воздействий, позволяющих повышать усилие голеностопного сустава и не наносить ему травматических повреждений.
Калибровка экзоскелета
Любой экзоскелет — это устройство для расширения человеческих возможностей. Даже наиболее совершенные гаджеты не могут выступать в роли телепатов. Чтобы механика «разобралась», чего от неё хотят, нужно каким-то образом наладить контакт приводов с нервной системой человека.
Исследовательские группы по всему миру активно работают над разработкой методов управления, но аспекты адаптивной настройки контроллера до сих пор представляют изрядную сложность. Традиционный подход сводится к ручной настройке экзоскелета. Оператор или носитель устройства смотрит на параметры походки, а после вносит исправления. При всей простоте этот метод априори будет субъективным. Значит, оператор должен быть весьма продвинут в работе с программно-аппаратной оболочкой экзоскелета. Более современное решение — отдать часть «скучной» работы на своеобразный аутсорс.
В этом случае на носимом компьютере будут непрерывно обрабатываться сложные алгоритмы, чей список весьма обширен:
Поиск оптимальных параметров.
Увеличение метаболической выгоды движений.
Мгновенная оценка энергетических затрат пользователя.
Принятие решения, в какой момент направить физическую помощь суставу.
Для этого система должна знать, от чего ей отталкиваться. Метаболические затраты человека можно исследовать разными способами, но самым простым выступает измерение дыхания. По его частоте, глубине, а также концентрации углекислого газа на выдохе можно делать выводы о том, насколько интенсивно протекает энергетический обмен.
Динамические модели передвижения всегда ориентированы под конкретную модель экзоскелета. Вычислительные алгоритмы представлены множеством вариантов. К ним относят обучение пользователя с помощью инструктора, поиск экстремумов и адаптивное динамическое программирование.
Как уже говорилось в этой статье, многосуставной мягкий экзоскелет облегчает ходьбу через подошвенное сгибание, а также разгибание в тазобедренном суставе. Его компоненты представлены поясным ремнём, двумя набедренными блоками, мягкими подвесами между икрами и передней частью талии, а также специальной обувью. Общая масса всех комплектующих — всего лишь 1 кг 100 г с учётом двух металлических кронштейнов на задниках ботинок.
Устройство активно взаимодействует с ногой через две точки приложения:
Сгибание бедра во время первой фазы отталкивания.
Многосуставное разгибание, после которого наступает новая стадия ходьбы.
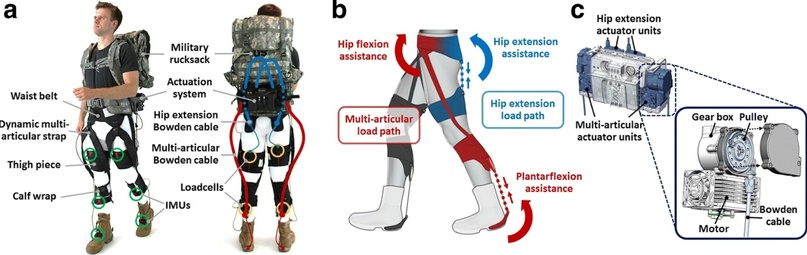
На этом изображении видны компоненты экзокостюма и некоторые устройства для аппаратного облегчения ходьбы. А: Красные и синие линии — прокладки тросов Боудена. Толстыми линиями обозначены оболочки, а тонкие показывают ход самих тросов. Зелёные и жёлтые кру
Обратим внимание на исполнительную систему. Её части расположены в рюкзаке. Четыре независимых приводных блока обеспечивают развитие усилия. Механизм-исполнитель представлен безрамным шестиполюсным мотором Emoteq от американской компании Allied Motion Ink. Коробка передач Spiroid обеспечивает передаточное число 38:1 для приводных блоков и 36:1 в случае процесса разгибания бедра.
Исполнительная система передаёт развиваемое усилие на экзокостюм с помощью тросов Боудена. То есть при втягивании струны сокращается расстояние между несколькими точками крепления, которое можно и нужно замерить. Желательно — в режиме онлайн.
Всё это запитано от литий-полимерного аккумулятора весом 2 кг. Его заряда вполне хватает на 8 км непрерывной ходьбы.
На каждой ноге испытуемого расположено по шлейфовому жгуту. Он включает пять инерциальных блоков для динамических измерений: IMU, MTi-3, а также два тензорных датчика LBS200. Эти приборы собирают данные в реальном времени. Блоки инициируют каскад принципиально важных замеров, таких как определение ориентации экзоскелета в плоскости движения, а также угловой скорости каждого сегмента.
Датчики нагрузки идут параллельно с боуденовскими тросами. Они мониторят уровень вспомогательной силы, которая направляется носителю системами экзокостюма.
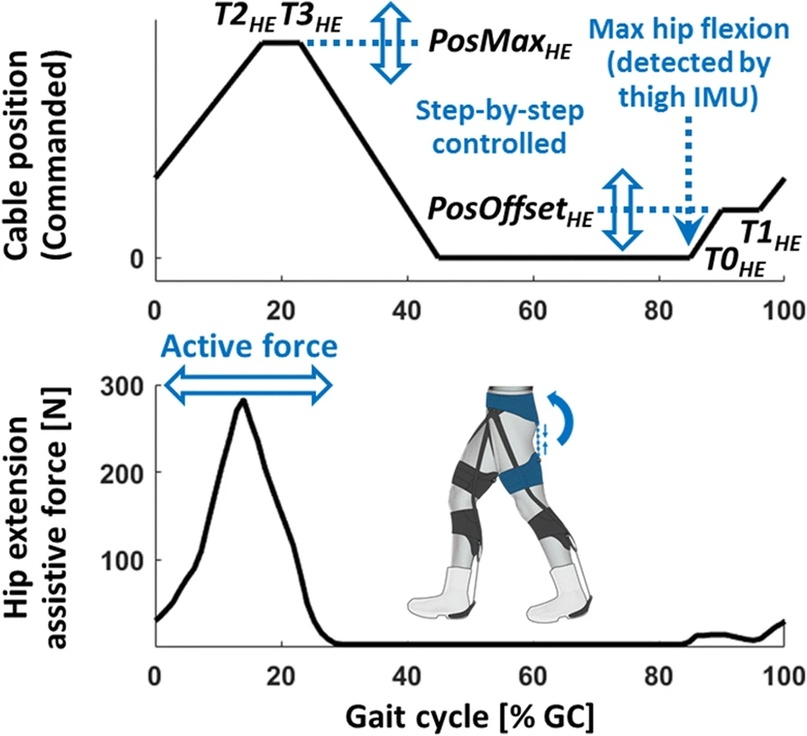
Экзокостюм обеспечивает поддержку ходьбы, втягивая тросы Боудена синхронно с движениями в суставе. Профили положения троса рассчитываются исходя из четырёх параметров: Т0, Т1, Т2 и Т3. Каждый из них занимает определённую процентную величину в цикле ходьбы. Следующие параметры, PosOffset и PosMax, можно получить, выполнив комплекс итеративных вычислений во время работы устройства.
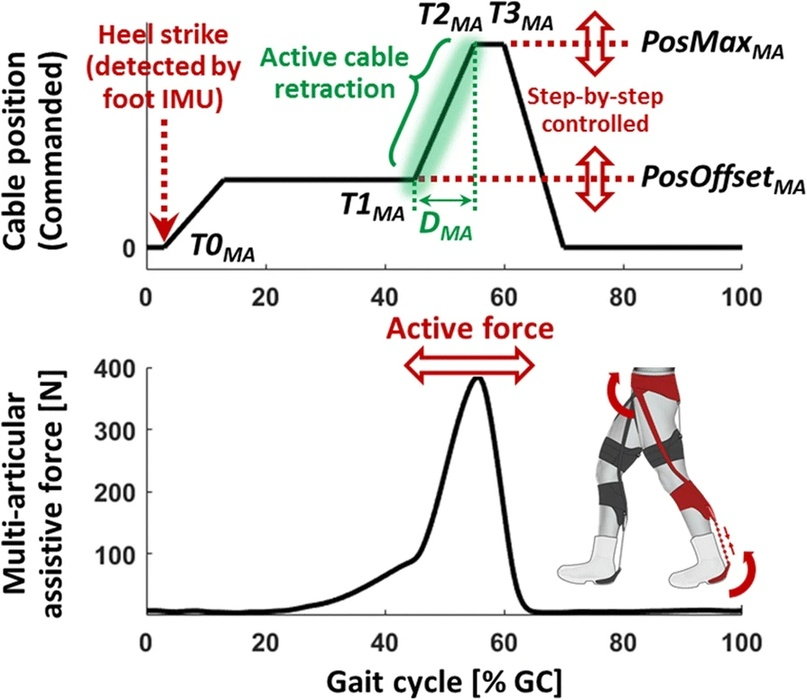
На этом изображении представлены данные о работе многосуставного контроллера. Вверху обозначен профиль положения боуденовского троса. Результирующий профиль, через который выражена вспомогательная сила, можно видеть ниже.
Уделим немного внимания разбору этих циклов:
Т0 определяет пределы цикла походки и время запуска контроллера.
Т1 — точка активного втягивания троса.
Т2 выражается в момент завершения активного втягивания — то есть когда механика прекращает адаптивную помощь.
Отпускание троса закодировано в Т3.
Соответственно, PosOffset проявлена в точке Т1 выражает максимальное вытягивание троса Боудена, а PosMax — экстремум, при котором струна оказывается полностью втянута. Он длится от Т2 до Т3.
Удар пятки о поверхность — момент, в который запускается работа экзокостюма. Львиная доля помощи во время фазы отталкивания осуществляется именно в виде реакции на этот триггер. Зелёный цвет выделяет фазу активного втягивания троса. Параметры этой фазы определены промежутком между Т1 и Т2. Настройка параметров управления происходит в тесной интеграции с данными об увеличении развиваемого усилия.
Эта иллюстрация демонстрирует репрезентативные данные о работе контроллеров сгибания бедра. Вверху показан профиль положения троса Боудена. Снизу — результирующий профиль вспомогательной силы. В данном случае поддержка разгибания начинается с выявления точ
И здесь мы подходим к более сложному вопросу: механизму работы контроллера, который следит за нагрузкой в нескольких суставах. Сначала происходит удар пятки в нижней точке траектории. Это не остаётся незамеченным для гироскопа. Такое событие выступает триггером для запуска многосуставного контроллера Т0МА. Тогда включается двигатель, обеспечивая втяжение троса со скоростью 394 мм/с. Такое значение удалось получить в ходе многочисленных испытаний. Если скорость будет ниже, то экзоскелет и носитель начнут работать вразнобой. При ускорении втягивания возникает иной риск — вызвать сгибание до того, как оно понадобится в следующих фазах ходьбы. В таком случае возможно падение человека, а подобных инцидентов следует избегать.
Таким образом устройство достигает PosOffset и сохраняет положение до начала активного втягивания троса в Т1. Оно будет длиться вплоть до PosMaxМА, чья финальная точка — положение Т2.
Затем контроллер фиксирует положение троса, пока тензодатчик не распознает падение силы носителя, которое проявляется во время сгибания голеностопного сустава. Выяснив, что сейчас человек готовится к новому шагу, экзокостюм начинает отпускать трос.
Скорость выпускания зависит от ритма ходьбы. Её верхняя граница — 606 мм в секунду, пока система не достигнет нулевого положения. В нём трос пассивно повисает, чтобы испытуемый не испытывал затруднений при повороте тела и смене траектории. На этом цикл активной помощи можно считать завершённым. После удара пяткой он снова запустится, проходя те же самые итерации.
В конце каждого шага контроллер динамически определяет, уменьшить или увеличить PosOffset PosMax для следующего шага. Это решение принимается исходя из сравнения желаемой и измеренной силы. Учёные экспериментально выявили, что оптимальной пиковой силой в PosOffset будет 75 Н, которая будет приложена во временной промежуток между Т0 и Т1. PosMax обеспечивает пиковую силу в 400 Н между Т1 и Т3 соответственно. Выходит, 400 Н — это и есть выигрыш в силе, которая проявлена во время активного втягивания кабеля.
Это устройство предназначено для помощи в походке, когда разгибательная мускулатура бедра проявляет наибольшую активность. Нюансы биомеханики таковы, что максимальное сгибание бедра наступает на 12% быстрее, чем контакт пятки с поверхностью. В этом случае Т0 соответствует отметке в 0% от полного сгибания бедра. С этого момента двигатель начинает втяжение троса со скоростью 800 мм/с, пока система не достигнет PosOffset.
Такое состояние поддерживается, пока ползунок не заполнится до 7%. От 7 до 28% наступает повторное втяжение троса, которое закончится PosMax на 28%. Пройдя немного больше четверти глобального цикла, контроллер дожидается 34% сгибания. В этот момент наступает следующая фаза работы: отпускание троса со скоростью 800 мм/с.
Контроллер разгибания бедра обеспечивает поддержку в 10 Н в PosOffset между Т0 и Т1, которая переходит во взрывное увеличение силы до 300 Ньютонов между Т1 и Т3. Звучит неплохо, но многосуставная помощь требует калибровки под конкретного человека. Здесь в полной мере раскрывается потенциал онлайновой настройки параметров управления, благодаря которым получится обеспечить максимальную силу, развиваемую в голеностопном суставе. Этот показатель имеет явную корреляцию с метаболическим преимуществом, ради которого и был начат столь прорывной эксперимент.
В цикле ходьбы существует великое множество важных точек. Из него экспериментаторы особенно выделяют два параметра: Т1 и DMA, который рассчитывается по простой формуле DMA = Т2МА — Т1 МА. Следовательно, через DMA выражена продолжительность активного втяжения троса.
Показатели Т1 и DMA лучше всего отображают состояние троса во время активной фазы отталкивания — следовательно, именно в этот момент экзокостюм сообщает большую часть силы голеностопному суставу. Исследователи разработали весьма аскетичный алгоритм, позволяющий наблюдать критически важные параметры ходьбы в режиме онлайн. Настройка занимала 15 минут, пока испытуемые ходили по беговой дорожке. Многосуставной контроллер не сидел без дела, активно замеряя 16 параметров, а также отыскивая те настройки, при которых адаптивная помощь даст максимальный прирост силы.
Всё начиналось с проверки четырёх стартовых условий, при которых Т1 изменяется в пределах 35, 40, 45 и 50% от глобального цикла сгибания бедра. В это же время DMA оставался неизменным на протяжении начальных 15% временного интервала. Среди этих четырёх значений устройство находило такую настройку адаптивной помощи, при которой лодыжка развивает максимальное усилие. При этом экзокостюм получил ряд ограничений, не дающих развивать прирост силы более 400 Ньютонов.
Повторяя эти проверки каждые 2,5-5,0% от длительности цикла, программная оболочка находила значения, при которых прирост силы укладывался в заданные коридоры. Преимущества такого алгоритма состоят в его простоте. Процесс тонкой настройки состоял в динамической смене двух параметров управления. Каждая математическая развёртка по двухмерной матрице учитывала лишь один параметр, а второй оставляла неизменным.
Существуют и другие методы проводить этот комплекс алгебраических вычислений, но такой подход позволял выяснить, в какой мере изменение одного параметра влияет на все остальные процессы во время ходьбы.
Тестирование
Тестирование экзоскелетов включает ходьбу с нагрузкой без экзокостюма, с отключенным устройством и те же самые действия при включенном гаджете.
Для чистой скорости метаболизма и процентного снижения его интенсивности учёные выявили два важных критерия. Ими стали межсубъектное среднее значение и стандартная ошибка среднего значения. Двусторонние парные t-тесты определили статистическую значимость для разницы в чистой скорости между двумя состояниями.
На следующем рисунке можно видеть положительную карту возможностей для увеличения силы, развиваемой в голеностопном суставе:
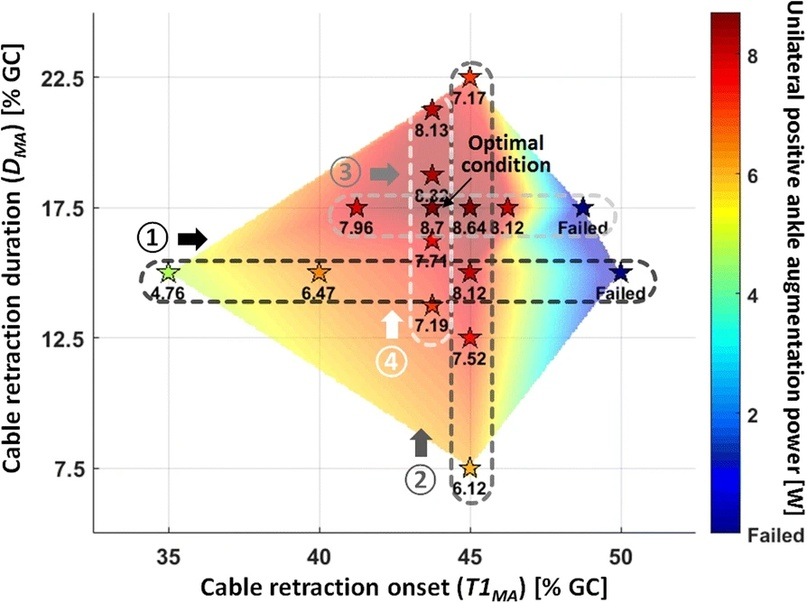
Так выглядит положительная карта мощности во время настройки контрольных параметров. Звёздочки отражают условия, за которыми наблюдали системы контроля. Числа под каждой из них — положительная односторонняя мощность усиления. Она выражена в ваттах. Стрелки
На следующей картинке показаны параметры управления для конкретного испытуемого, найденные методом адаптивной настройки параметров по результирующим профилям. Начало втягивания троса у пользователя происходило во время фазы Т1 или 43,75-46,25% цикла ходьбы. При этом DMA варьировалась от 13,75 до 22,5%. Эти различия неизбежно приводят к возникновению широкого диапазона профилей силы.
Использование многосуставного мягкого экзокостюма существенно улучшает энергетические затраты на переноску грузов. Как видно из приведённых данных, включенное устройство экономит до 15% энергии носителя и понижает скорость его метаболизма на 20-24%:
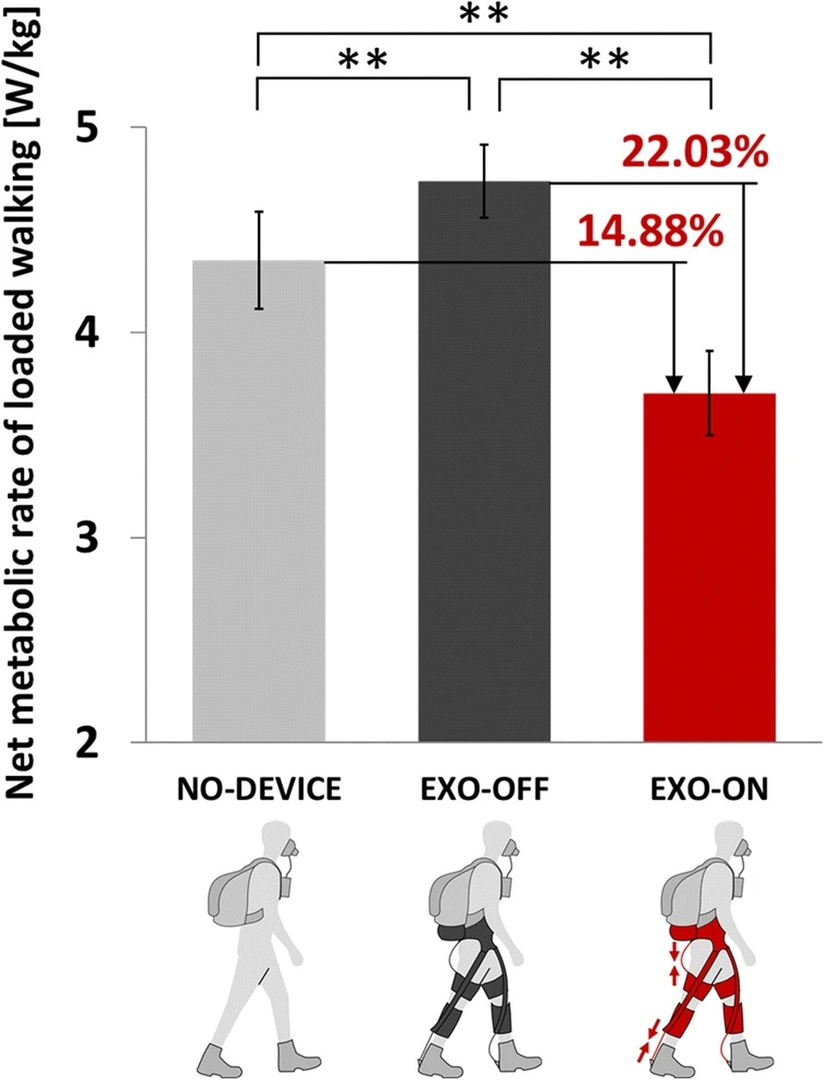
Здесь показаны метаболические затраты на переноску груза, собранные по данным трёх статистических выборок. Сплошные столбцы отображают усреднённое значение чистой скорости метаболизма. Двойные звёздочки указывают, что разница между двумя условиями (работа
Экзоскелет оказался жизнеспособным. Он принёс явную метаболическую пользу, сделав движения носителя менее затратными.
Спасибо за внимание. Подписываемся и всё такое.
И наш дискорд где можно про все это поговорить и спросить!
https://discord.gg/pMZN7TM
Лига Биоников
116 постов711 подписчиков
Правила сообщества
Стандартные правила
Оскорбления, провокации, токсичное общение, слишком частый флуд, наезды, жирный троллинг - выдаем 2 предупреждения, на третий раз бан.