

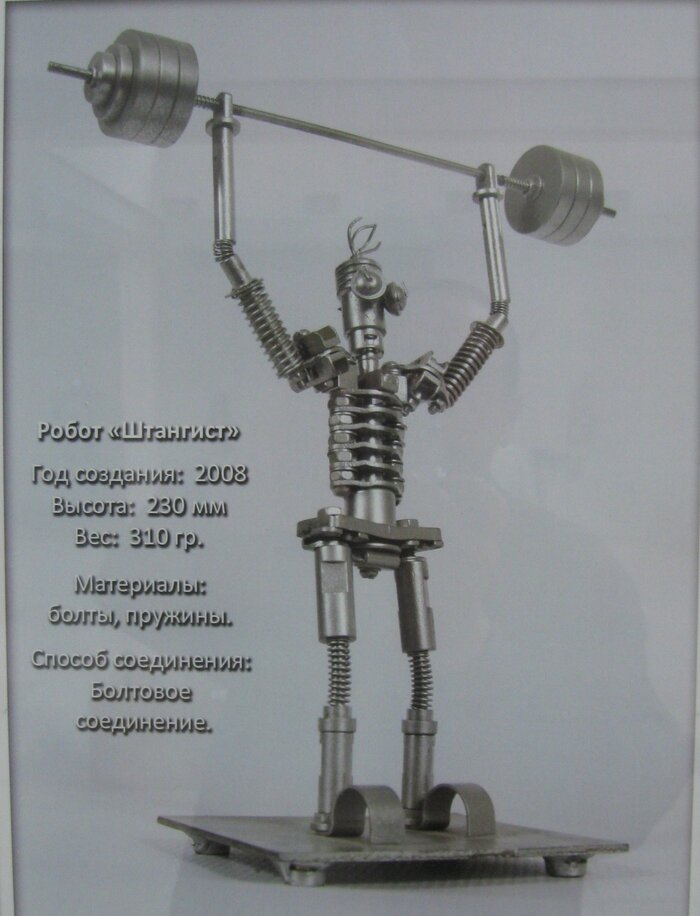
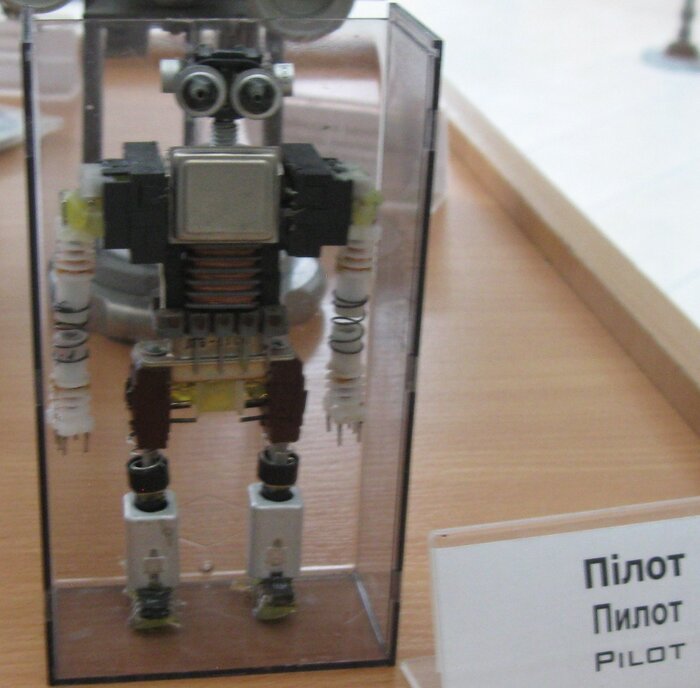
Выставка "Роботы" 2017 г
Фоторепортаж о выставке брестского Самоделкина.










Показать полностью
16
Фоторепортаж о выставке брестского Самоделкина.
УАЗик начинаем "делать" с того, что поначалу его разбираем.
Выкидываем кузов с кабиной(УАЗ-3909) и сиденьями, и оставляем только рабочее кресло водителя возле органов управления. Это минус 400 кг. Только от этого проходимость УАЗика увеличивается многократно. Это первый этап модернизации. Он уже многое даёт. Не надо ничего лишнего делать, а просто выкинуть всё лишнее.
Второй этап - это модернизация распределительной коробки. Сразу же будем делать её по высшему качеству, удовлетворяющему всем запросам всех владельцев этой техники.
Однако в реальности производить это можно будет методом постепенного приближения - сначала сделать одно, потом второе, потом третье. Или сразу завершить несколько этапов сначала, а потом всё остальное.
И так: меняем редукцию распределительной коробки - вместо 1:2, ставим 1:4.
Ничего не переделывая больше, а только обновив все регулировки, заменив все расходники и повысив редукцию на выходе распред коробки мы ещё больше увеличиваем проходимость нашего походного "плавсредства". Теперь на мосты можно ставить огромные колёса диаметром аж: 1 м 30 см, но правда облегчённые - так называемые ободрыши или пневмошины.
Не переходя к другим средствам обновления нашего супервездехода, займёмся пока распределительной коробкой.
На неё нужно будет установить дисковый тормоз от двенадцатой модели ВАЗ или от подобных моделей. Вместо устаревших родных тормозов. На задний карданный вал.
Затем заменить стандартный комплект шестерёнок на 1:3,9, который уже в природе имеется. И есть видеоинструкция как это сделать.
Если пойти ещё дальше, то заодно можно создать, и отключаемый передний кардан!
Всё это делается довольно просто и об этом есть подробная информация в Интернет - и по установке дисковых тормозов на задний кардан, и по замене комплекта шестерёнок.
При этом можно обойтись без основных колёсных тормозов - это лишний вес - это четыре дисковых тормоза - на каждом колесе по одному, и это довольно хорошо прибавляет величину инерции в подвеске.
Однако тут есть небольшое Но! Просто тормозить, нажимая на педаль тормоза, обычно, на этих карданных тормозах, не получится. Там похоже придётся применить систему ABS и определённый алгоритм срабатывания этого тормоза, от этой системы. Только и всего. Или есть ещё какое-то, возможно, другое решение, удобного применения, этого карданного тормоза.
Однако никто вам не запрещает иметь пять дисковых тормозов на вашем автомобиле.
Ну и Высший пилотаж - это создание вала отбора мощности, тоже отключаемого и с выходом, как вперед так и назад, относительно корпуса автомобиля. И отключаемый задний кардан. И всё это на этой же УАЗовской распределительной коробке.
Информацию в Интернете как это сделать - вал отбора мощности и отключаемый задний кардан, я не нашёл, но спроектировать и сделать это самому, я думаю, не составит большого труда, используя приложение AutoCAD.
Да, и ещё чуть не забыл. Эту распред коробку нужно отъеденить от УАЗовской коробки передач, сделать её отдельной, независимой. Это обязательно, для нашего случая.
Блокировку мостов между собой, в распред коробке, не пропустим тоже.
На этом пока всё, но думаю, что даже этой информации хватит многим под завязку, особенно хозяевам УАЗа, если они вдруг соберутся съездить в лес, в непроходимую чащу, по грибы.
Продолжение следует - это только начало. Впереди длинная история создания настоящего робота-помощника, такого которого вы нигде и никогда не встречали раньше, и не встретите и теперь. И только будущее откроет нам такие возможности, которое мы можем приближать вместе.
1. Заднее расположение двигателя.
2. Четыре ведущих колеса.
3. Задние поворотные колёса и передние поворотные колёса - все четыре поворотных колеса.
4. Блокировка мостов между собой и блокировка колёс между собой. Блокировка дистанционная.
5. Гидро- или электроусилители на мостах.
6. Многорычажная подвеска на заднем и на переднем мостах, при условии, что если передняя подвеска не является независимой.
7. Раздаточная коробка с повышенной редукцией 1:4.
8. Отключаемый передний мост, отключаемый задний мост, отключаемый вал отбора мощности, отключаемые колёса от мостов. Дистанционно.
9. Реверс трансмиссии.
10. Дисковый тормоз на заднем кардане. Расположен на распределительной коробке.
11. Рама ажурная из труб. В идеале.
12. Снизу рамы приварен отражающий щит-экран из нержавеющей стали 3 мм толщиной.
13. Сборно-разборная модульная конструкция всего аппарата.
14. Двигатель с водителем подвешены относительно рамы на своей независимой от рамы подвеске.
15. Сиденье водителя расположено посередине, относительно, - как вдоль корпуса, так и поперёк. Или способно сдвигаться в стороны.
16. Поворот на 180 градусов кресла оператора-водителя.
17. Двигатель сделан как модуль с разъёмами.
18. Двигатель применяется от переднеприводного автомобиля вместе с главной передачей в сборе. Бензиновый или, возможно, дизельный.
19. Регулируемый комбинированный клиренс в динамике - во время движения, с помощью пневмоподвески или другим способом.
20. Боковые защитные направляющие перед задними колёсми.
21. Дистанционная подкачка и спуск колёс.
22. Нет бамперов. Колёса выступают спереди и сзади рамы.
23. Колёса низкого давления. Ободранные шины.
24. Система ABS и её приложения.
25. Водозащищённость всех узлов и агрегатов и водная проходимость самого автомобиля в целом - это как задача максимум.
26. Внедрены элементы самоуправления автомобилем.
27. Бортовой компьютер.
28. Все органы управления модифицированы сервоприводами.
29. Роботизированные: коробка передач, а так же все другие узлы управления.
30. Минимум 6 степеней свободы - 6 способов управления этим транспортным средством.
31. Лебёдка механическая на борту. Съёмная.
32. Внутренний пневмодомкрат для быстрой смены колёс.
33. Набор сменных колёс. 4 комплекта.
34. Генератор, помпа, водомёт и другие механические приспособления - съёмные.
35. Съёмный подвес для плуга и других сельхоз-орудий. В том числе с подключаемым валом отбора мощности.
36. Аэродинамический обтекатель.
37. Салон выполнен в виде животворящей капсулы.
38. Ремни безопасности по принципу действия устроены точно так же, как и подобный инвентарь в спортивном самолёте.
39. Система спасения от пожара на борту.
40. Защищённый бензобак.
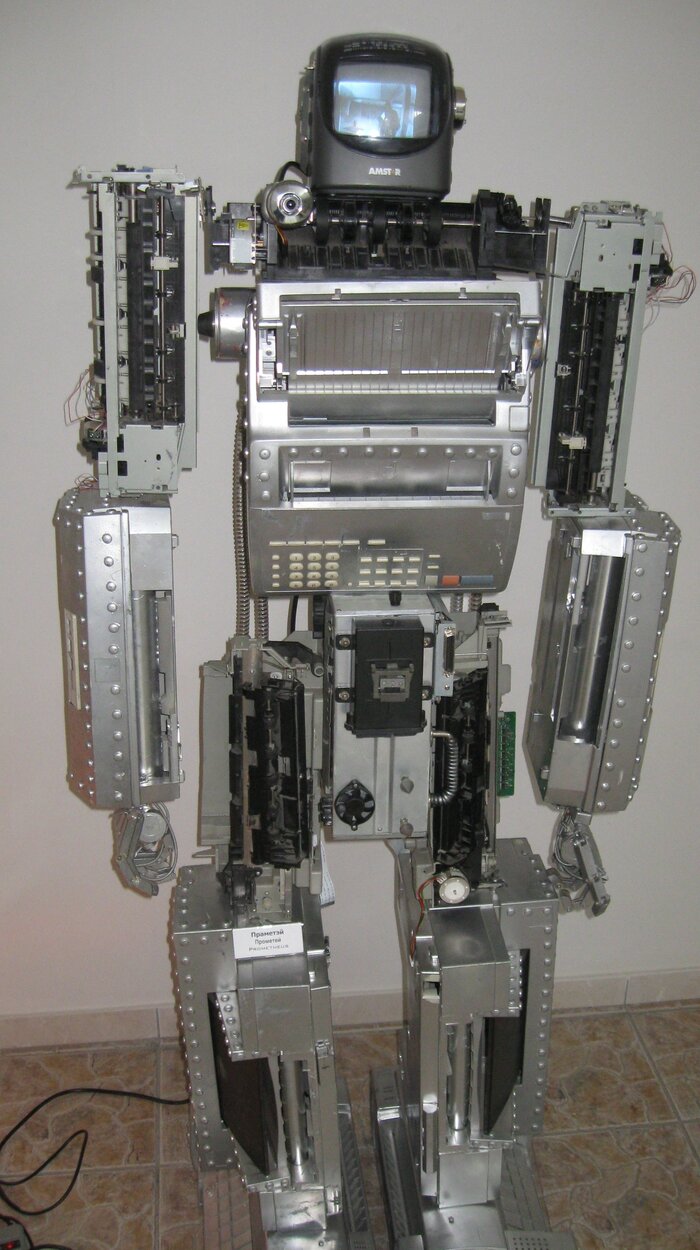
Первенец.
Здравствуйте!
Я выделил несколько основных принципов, которые можно будет потом обсудить и дополнить.
Всем привет, хочу поделится с вами своим танком.

Я cделал танк для того, чтобы научится делать подобные машинки и набраться побольше опыта с платами Arduino и ESP. Ну и вообще просто захотелось собрать что-то такое что б ездило и жужжало =)
Основные компоненты, которые я использовал:
*Модуль ESP-32-cam – в роли камеры и контроллера, который отвечает за роботу с WiFi.
*Arduino Nano – контроллер, который отвечает за управление двигателями и прием/обработку данных с датчиков.
*L298N – драйвер для двигателей (выбран из-за харизматичного вида).
*Датчики, которые есть на борту – ультразвуковой дальномер US-025; барометр BMP280; модуль акселерометр и гироскоп MPU-6050; термометр и гигрометр DHT-11, датчик Холла A3144 в роли импровизированного тахометра.
*Бортовое питание – два аккумулятора 18650 2000 мА*ч; повышайка MT3608; зарядка usb type-c.
*Корпус использовался от игрушечного танка – срезал верхнюю часть, замазал все дырки термоклеем, редуктор оставил родной, металлическая крышка вырезана из автомагнитолы, петля обычная дверная.
В целом выбор датчиков не обусловлен ничем кроме моего стремления поиграться с ними, по большему счету они ничего не делают, но создают мне базу для будущих экспериментов, а еще с ними танк выглядит как что-то серьезное).
Важно!
Скорее всего правильно подписывать картинки снизу, но ведь это не удобно прочитать описание, а потом листать вверх что бы приглядеться снова, по этой причине что бы не возникало путаницы предупреждаю – описание к изображению будет сверху.
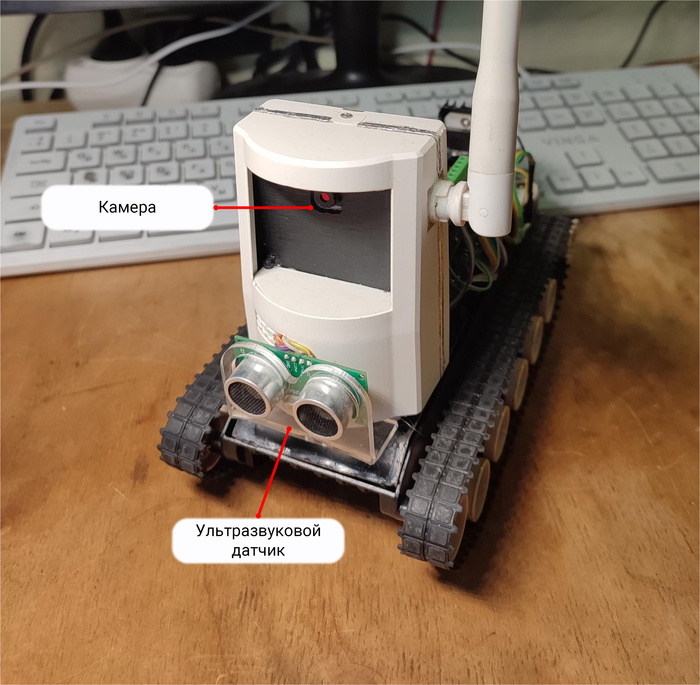
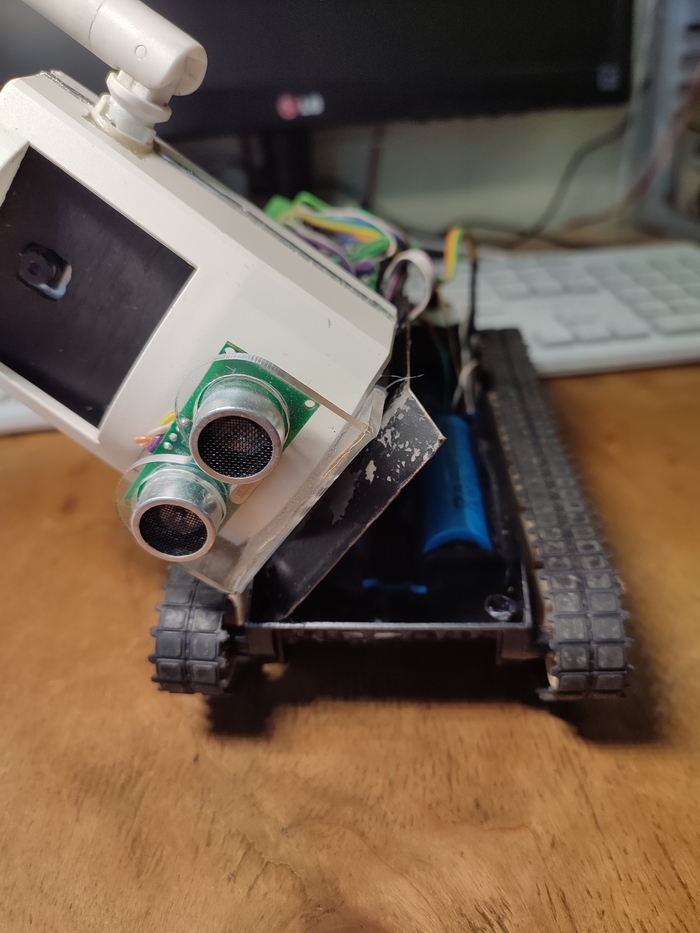
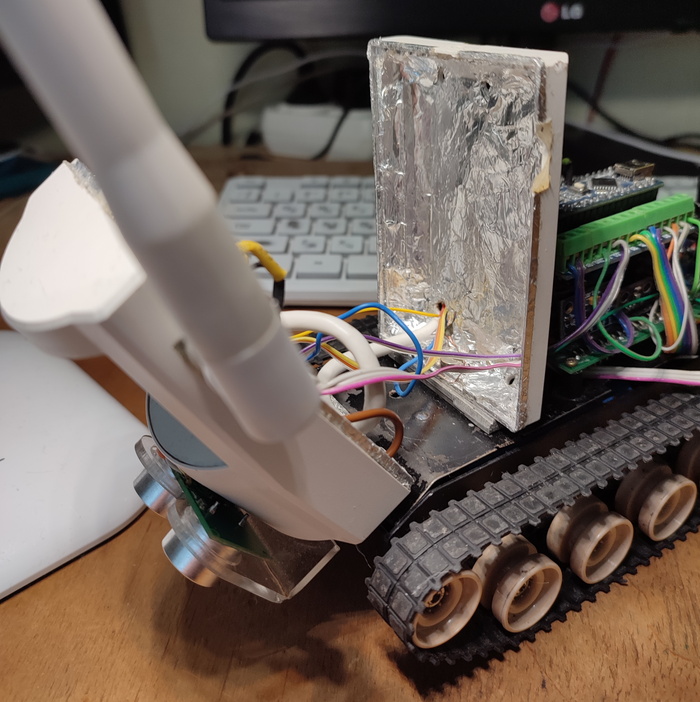
Вид танка спереди. Можно увидеть зеленую плату с двумя «вылупнями» – это ультразвуковой датчик, немного похоже на глаза. Выше в очень аккуратном вырезе притаилась камера и хотя ее характеристики позволяют ей снимать мир в потрясающем разрешении в 2Мп (1600x1200) при практическом использовании ее разрешение меньше – 800x600.
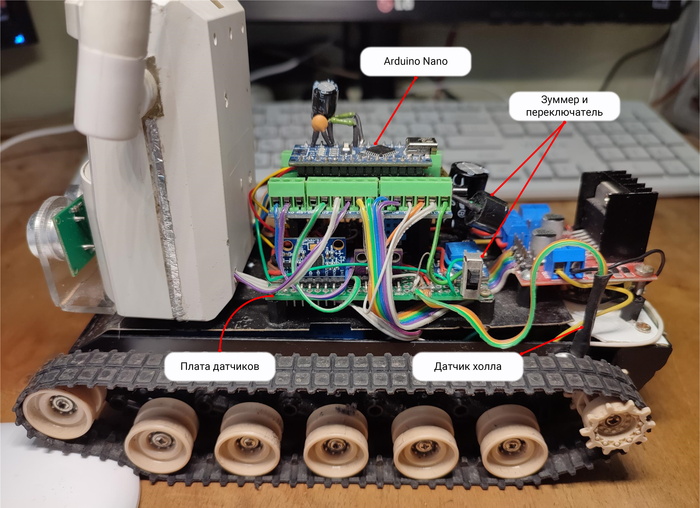
Левый борт. Большинство датчиков размещены (с комфортом) на нижней зеленой плате, на правом краю платы можно увидеть рычажок который переключает танк в бесшумный режим – не будет пищать зуммер, который в свою очередь нужен для подачи танком служебных и оповещающих сигналов для разгона зевак на улице (что б не задавили танк). Так же видно торчащий как палка провод в правом нижнем углу, это датчик Холла, который закреплен напротив ведущей звездочки для подсчета ее оборотов (способ не очень, но работает). Этажом выше расположена Arduino Nano, отсюда она может эффективно распоряжаться своими подчиненными – датчиками и двигателями и общаться по выделенному каналу связи со своей подружкой ESP.
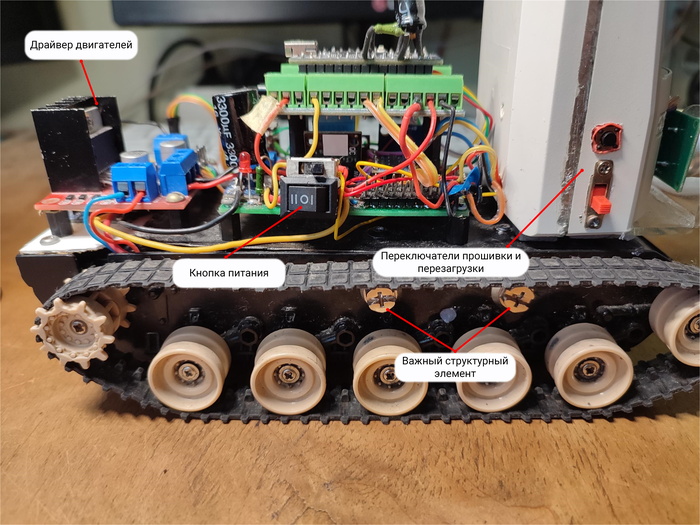
Правый борт танка. Тут можно увидеть: кнопку управления питанием, справа на белой коробке (корпус ESP) находиться красный рычажок, переводящий ESP в режим прошивки, чуть выше кнопка, выполняющая самую важную функцию – перезагрузку ESP. Слева на корме удобно устроился драйвер для двигателей L298N, его радиатор является важным элементом в дизайне танка. Ниже под гусеницей можно наблюдать два болта которые скрепляют крышку танка с его основным корпусом через петлю, данный элемент крепления намеренно сделан побольше для обеспечения структурной целостности и придания характерного вида танка.
Танк с открытой крышкой, вид спереди. Металлическая крышка выполняет несколько функций: обеспечивает эффективное использование пространства, облегчает монтаж элементов и самое главное придает танку бронирование (а танк ведь обязан его иметь). И просто это круто выглядит.
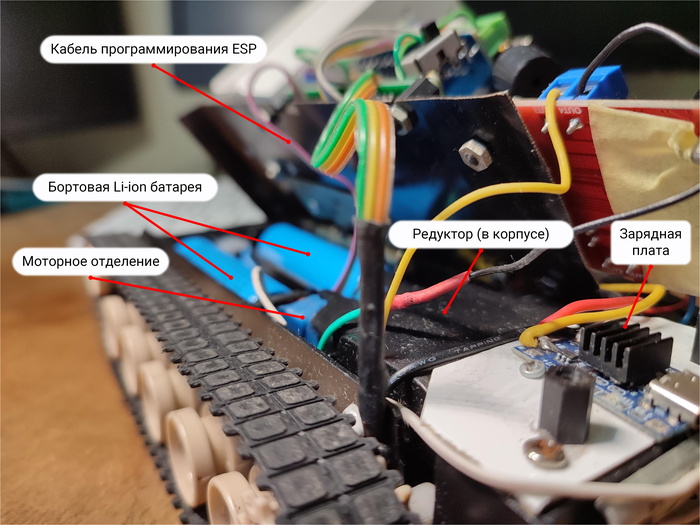
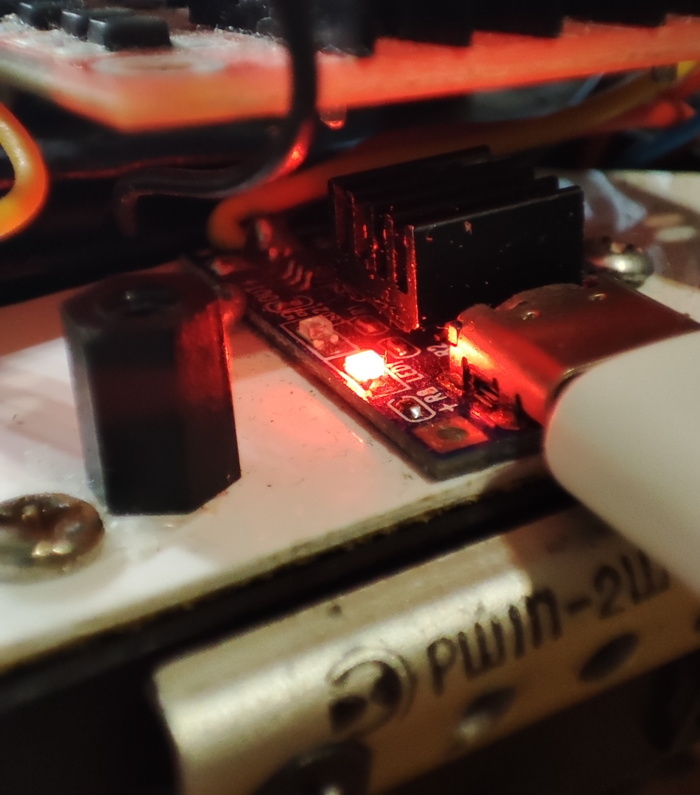
Танк с открытой крышкой, вид от кормы. На этой фотографии видно танковую батарею, моторы, спрятанный шнурок для прошивки ESP, плату зарядки аккумуляторов, которая позволяет танку быть в духе современности – type-C же. Можно еще увидеть кривой монтаж и вырез крышки, но все это элегантно скрывается не в фокусе.
Танк, вид от кормы – на зарядке. Снизу прикручен бампер, благодаря чему к танку можно прицепить трос для помощи своим менее везучим братьям.
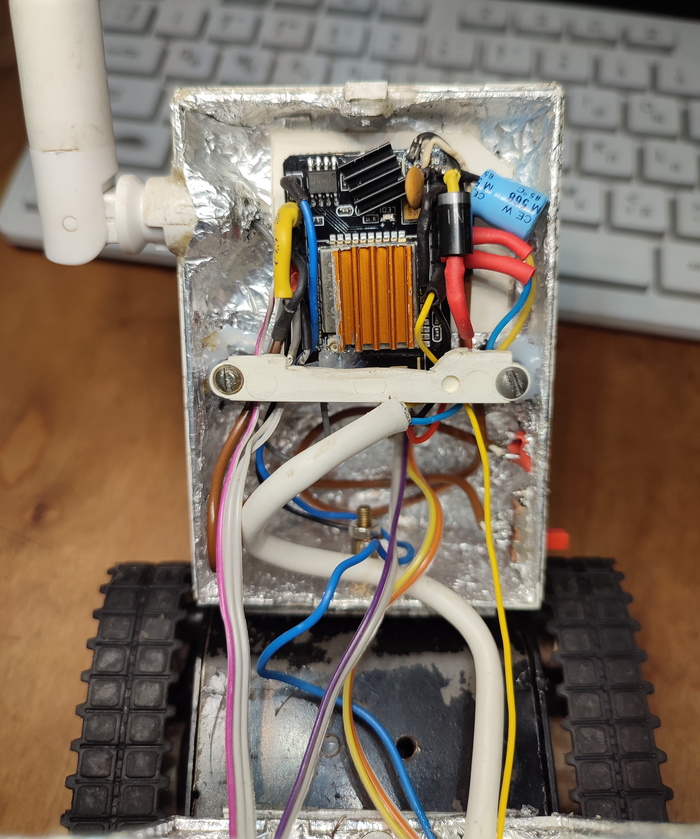
Разобранный корпус для ESP. Сам корпус был сделан из остатков сигнализации (датчик движения), внутри обклеен фольгой для экранирования ESP от помех (и просто для красоты). Антенна взята от старого роутера. Данная коробка отлично дополняет стиль танка «из чего было – с того и собрал».
Внутренний вид корпуса ESP. Почти все контакты ESP заняты, снизу видно высокотехнологичное крепление, которое обеспечивает механическую прочность всей конструкции, а также позволяет легко вносить изменения. ESPшка довольно сильно греется во время стрима видео по этому на сам чип и стабилизатор заботливо наклеены радиаторы.
Для управления танком я создал приложение при помощи Unity (игровой движок). Конечно, можно было сделать нативное приложение для андроида, но чисто для прикола почему бы не сделать его на Unity, да?
Главный экран приложения. Вверху в шапке можно видеть всю нужную информацию, например качество связи, заряд батареи, последнюю отданную команду движения и пару-тройку датчиков. Внизу управление. Слева выход, журнал. Справа настройки, данные датчиков и кнопка послать звуковой сигнал. Уровень сигнала ноль, потому что это уровень сигнала от репитера (вторая ESP, в роли маршрутизатора для увеличения радиуса действия), но на тот момент танк был подключен напрямую.

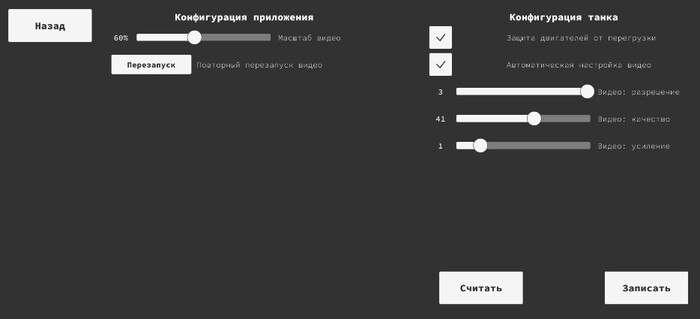
Экран настроек. Можно поменять размер картинки, качество видео. Из прикольного автонастройка качества видео, если связь ухудшается и видео начинает идти с задержками, то приложение автоматически посылает сигнал танку для перенастройки качества сигнала. Работает не прям что идеально, но вполне сносно. Так же есть галочка для снятия защиты двигателей, не смотря на название двигатели оно не защищает, это защищает сам танк от зависания, когда на низком заряде двигатели выжимают последние капли из батареи и напряжения не хватает для контроллеров (да можно было бы сделать раздельное питание, но мне хотелось единое).
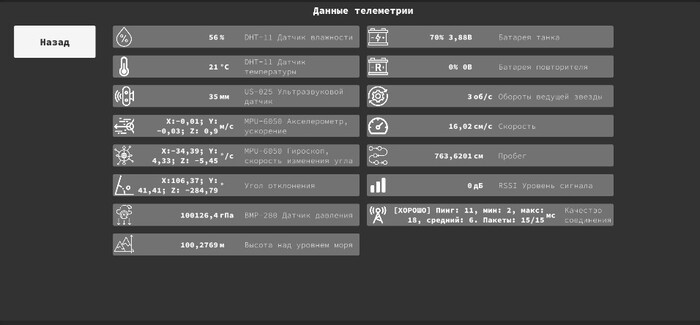
Экран данных с датчиков. Ничего такого просто датчики, просто данные. Часть из них к тому же не очень-то и настроена.
Демонстрация работы танка ниже на видео. Видео ускорено в 3 раза.
Выводы. Сам танк получился весьма непростым проектом, хотя я сделал его так как и представлял в своей голове изначально, в процессе я наткнулся на уйму багов, граблей и костылей, но зато теперь имею опыт создания подобного, а для этого я и делал танк.
В будущем я планирую сделать статью для того что бы поделится полученным опытом с сообществом, возможно это кого то вдохновит на нечто подобное, как когда то вдохновился я.
Бонусная фотография – танк на вечерней прогулке

НАчало.
Друг работал в школе учителем информатики, вел курсы робототехники у детей в ближайшей школе, и довольно неплохо писал код на паре популярных языках программирования. Звали его Веня, лет ему было под сорок, но при этом он никогда не был женат. Был лохмат, неряшливо одет.
- Интересно, интересно!!!! Ты где это взял?! Сейчас, погоди минутку, сгоняю за микроскопом к химику, подробнее изучим… я мигом.
Они сидели после уроков в школьном классе, через 40 минут должны были начаться курсы, поэтому надо было все быстро разузнать.
Веня принес учебный микроскоп, немного повозился с установкой образца под объектив, немного настройки…..
- Круто, крутейшая хрень, я такого конструктора никогда не видел, это наверное китайцы изобрели, они сейчас законодатели моды в таких штуках, но я нигде не встречал подобное. Это роботизированное лего, только очень маленьких размеров.. Тут много видов блоков, но они повторяются точно, пока увидел штук 15 видов, но их наверняка много больше.
- Это ж неудобно с ним играть, такой мизер собирать, это невозможно для ребенка, тут взрослый не каждый справиться – спросил Дима.
- А кто сказал, что они для детей?!? – интригующе спросил Веня. – они вполне взрослые игрушки.
- Тогда для чего они взрослым, если взрослые могут нормальное устройство сделать, вполне функциональное и не заниматься этим паззлостроением.
- Ну…. Тут много видов блоков, значит из него можно собрать много устройств, добавляя элементы по вкусу, в зависимости от текущей задачи… Плюс, посмотри – в каждом элементе есть токопроводящие элементы, и питание, и небольшие контроллеры, в каждом есть вроде по 3 светодиода и системы сцепления. И я так понимаю можно программировать момент, когда данный элемент зацеплен и когда он расцеплен. И как ты думаешь, что это может дать?
- Не знаю, можно соединять и разъединять, - задумался Дима.
- Ну это понятно, но во-первых, по команде, для каждого отдельного блока, во-вторых, дистанционно. Понимаешь?! Ты активируешь соединение из общей кучи двух блоков и они притягиваются друг к другу и сцепляются именно тем образом, как приказано по команде. Если они будут рядом, то автоматически сцепятся. Это облегчает в разы сборку сложного изделия. Надо только последовательно приблизить их к нужному блоку.
Второй плюс – ты можешь дать команду и все блоки расцепятся друг с другом, изделие исчезнет, разрушится, и будет лежать грудой крошек на месте нахождения.
- Ну да, как я и нашел его, отчасти….
- часть блоков несут в себе специфические устройства, например, более мощные светодиоды или трубки разных диаметров, или фото, видеокамеру или элемент питания, гибкое сочленение, датчик, передающее устройство, сервопривод.
- Это устройство не восстановить? Ты можешь дать ток так, чтобы он собрался..
- Нет, чтобы собрать его, надо последовательно подавать определенные сигналы, которые скорее всего шифруются.
- А для чего оно сделано – не понять? Ну – по той части, которая осталась?
- Можно сделать предположение, попробовать. Тут мало элементов, оно может передвигаться, быть небольшого размера, чтобы проникнуть через небольшие отверстия, и тут сохранилась телескопическая трубка, с небольшой помпой на конце. Сейчас попробую ее расковырять.
Он принялся ковырять конец трубки небольшой часовой отверткой, в итоге, разрушив небольшой клапан, из трубки протекла вязкая серая жидкость.
- Блин, фуу. Это ж сперма…!! Жук-осеменитель.
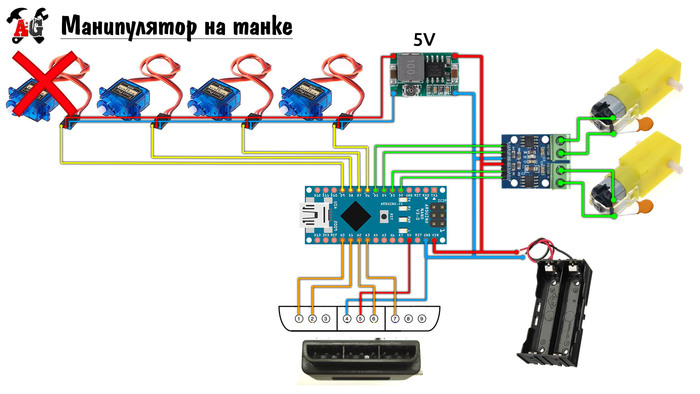
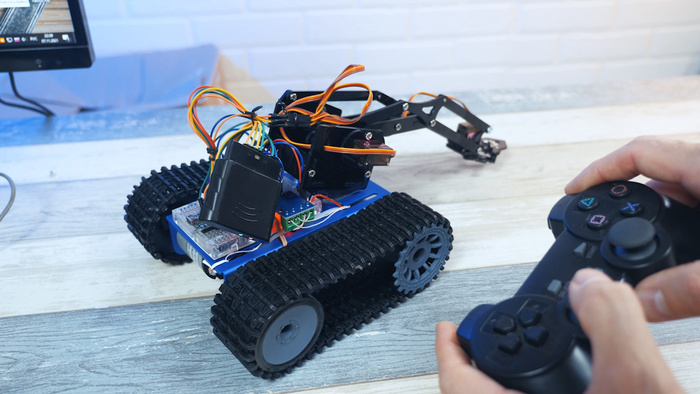
Решил собрать дешёвую гусеничную платформу с Aliexpress и поставить на неё руку-манипулятор, управление - геймпад от PS2 с беспроводным приёмником. Схема проекта получилась вот такая:
Игрушка получилась довольно забавная, жалко в детстве такой не было. Хотя мы то знаем, до какого возраста у мужчин длится детство)

Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.
* При вводе тега "Из говна и палок" он автоматически меняется на "Из подручных средств".





