Всем привет! Сильно поругался с женой. Вот прям развод. За месяц такой жизни собралась некая небольшая сумма, плюс от старых задумок присутствовал fpv-комплект. Также за год до этого подарили что то, ранее бывшее cheerson cx-20, и оно даже разок у меня взлетело. Но тогда я понял, что этот путь нужно пройти с нуля.
Определил задачу - реальный долголет под любительские видеосъёмки и, возможно, слегка пофристайлить. Когда научусь )
От чирка были моторы, копия фантомовских, 2212 980kv. От него же пошли в дело и регуляторы, вроде 12А, но мосфеты на 40-50А, короче двадцать под 4S должны были выдюжить. Так и вышло.
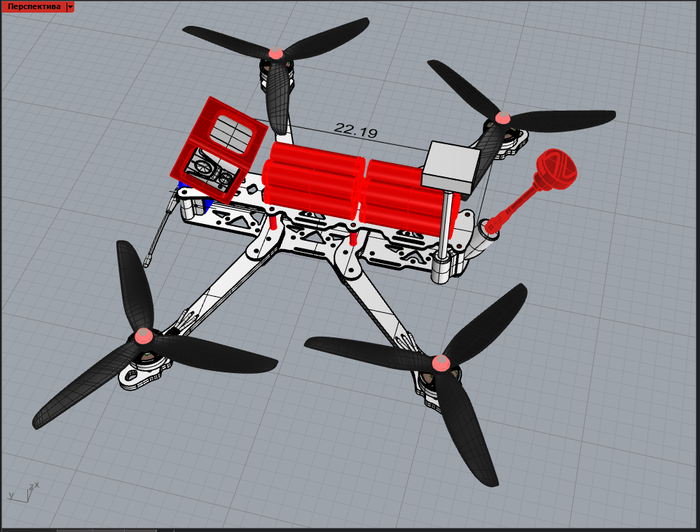
Раз мальчик крупный - берём крупную раму. HSKRC 390мм на бангуде была под promo, да и в принципе почти все купленное - promo.
Долго подбирал полетник, в итоге взял пару клонов omnibus f4 pro, с баро и датчиком тока. Пара выходов под сервы есть, значит будет бюджетный сервопривод.
Компас / gps достался bn-880, очень приличный модуль. После сброса и подключения к полетнику 20 спутников. Позицию держит отлично.
Ну и много мелочевки было заказано. Шнурки, липучки, модули для lrs qczek. Пока все не приехало, сварганил дисплейчик для lrs на ардуино и oled дисплейчике. Парсит mavlink, поступающий от lrs, показывает на дисплее и сохраняет в епром. При пропаже телеметрии показывает последние данные.
Аппаратуру взял по акции, flysky i6X. 10 каналов, по числу элементов управления - достаточно. Один переменник заменил шестипозиционным переключателем для выбора режима полета: acro, angle, angle+althold, poshold+althold, nav wp, rth.
Последние два пойду тестить завтра, кстати, пожелайте удачи :)
Итак, рама приехала. Последней. Все остальное уже собрано, предварительно настроено. Наступает бессонная ночь сборки.
Все резьбы проливаются фиксатором резьбы, все проводочки тщательно подрезаются, лудятся, хорошо пропаиваются. Мелочей тут нет, любой малейший косяк вылезет, и может даже дорого. Лег спать в 4 утра, в 7 подняла неведомая сила. Надо тестить - стучит в голове..
Моторы крутятся верно, армится, надеваю новые 9450 пропы и.. чуть даю газку в квартире, дрон валится на бок. Три пропеллера из четырех пришли в негодность.
Я ж в настройках ориентацию полетного контроллера не настроил - он у меня на 180 градусов развернут. Хотя, по идее, опрокидываться не должен был? Не знаю уже ничего, ложусь досыпать. В обед тщательно прохожусь по настройкам, проверяю примерную реакцию моторов без пропеллеров, выставляю субтримом аппаратуру в центр всех каналов управления. Вроде все четко.. Цепляю старые, явно повидавшие многое пропеллеры от чирка на 8 дюймов. Ещё раз калибрую акселерометр. Ну, с богом..
Буквально 30 сантиметров отрыв, а счастья то :)
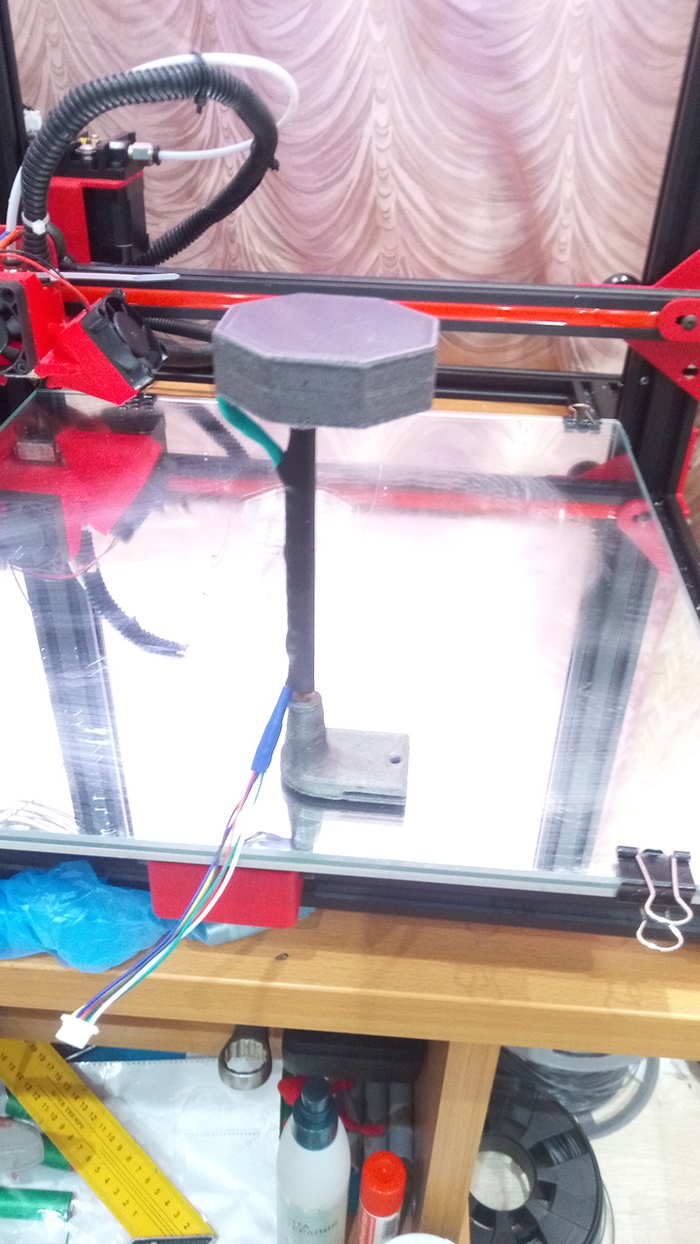
Печатаю элементы стойки для gps/компаса, как раз удачно подогнали на пробу филамент Аэротех, и на глаза попалась палочка от суши xD
Договариваюсь с товарищем Андреем, имеющим опыт с квадрокоптерами, и вскоре выезжаем за город на тест. Находим поляну.
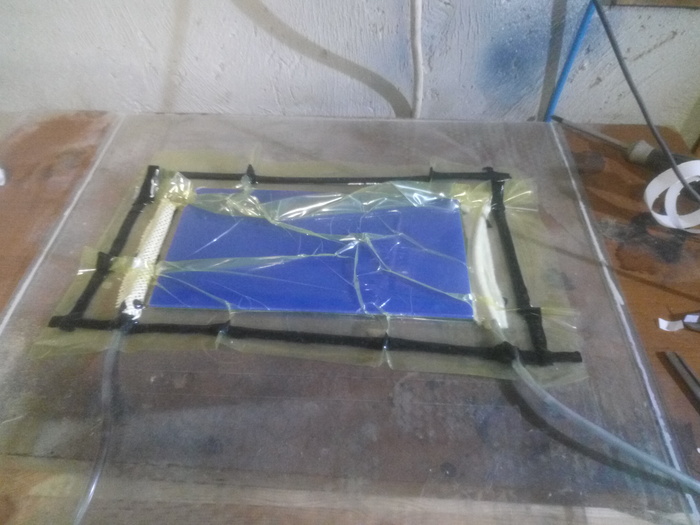
Проблем две - полное гонево с компасом, взлететь невозможно, и постоянный failsafe по пропаже сигнала управления с аппаратуры. Отключаем с телефона и шнурка компас с gps, взлетает! Слегка гуляет высота, нужно больше поролона на барометр и хорошо его пролить по периметру термоклеем. Очередной fs, дрон падает с трёх метров, ломает палочку от суши в стойке gps)
Не беда, настраиваем всякое разное в inav, пробуем, разбираемся, тюним pidы. Андрею нравится управление - мягкое, отзывчивое..
Явные проблемы с lrs. Похоже что подпалил один из модулей. На замену заказан, как приедет - продолжу изыскания. А пока первый полет по fpv в альтхолде. Нервничаю - жесть :)
Дома запихиваю в дрон приемник flysky, исключая из цепочки ретранслятор lrs, восстанавливаю стойку, настраиваю gps/компас, идём вечером с женой тестить на полянку рядом с домом.. Взлет в альтхолде, все хорошо. Переключаюсь туда, где должен быть poshold (удержание позиции по gps). Дрон падает в акро - режим то настроить забыл.. Дикий пятисекундный стресс, рейты высокие, дрон крутится и становится под прямым углом то к нам, то от нас.. Падает. Минус последние пропеллеры..
Спасибо Андрею - привозит давно валявшиеся в него складные самозатяги. Настраиваю режимы, пробуем..
Неуправляем в poshold полностью. Краешек пропа отлетел.. Показания компаса не совпадают с требуемыми. Неверная ориентация - положение компаса нужно задавать, учитывая разворот полетника на раме. Сам inav не учитывает.
Еду встречать жену с работы, кидаю заново настроенные дрон в машину. После гипермаркета нахожу рядом полянку. Не надеясь, что все получится, пробую.. Получилось! Держит позицию и управляется в ветер, как мавик!
Главная веха пройдена. Режим для "полного новичка" - круиз - работает. Можно учится, переключаясь иногда в angle, а то и в акро)
Но сначала - нужна уверенность в круизе.
Сегодня забрал на почте новые пропеллеры. 8045 трешки. Завтра опробуем..
Придумал, как крепить сервоподвес. Камеру кстати заказал quelima sq20, весит 20 грамм. Промо, за 1118 рублей :)
Надо моделировать ноги, скорее всего сделаю единой платформой с подвесом. Отстегнул - так всё, и ноги, и подвес.
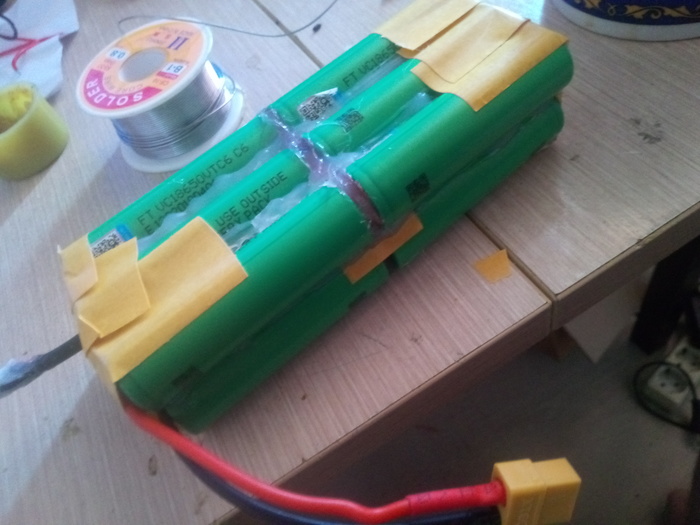
Опробовал 4s3p батарейку на дешёвых 18650 li-ion с Али. Тянет уверенно. Ячейки - varicore "vtc6" с приваренными выводами. По идее пак должен держать 60А особо не греясь, чего достаточно за глаза. Вес 580 грамм. Много, конечно, но 9000мач на 4s привлекает..
Возможно, 4s2p было бы эффективнее. Закажу пропеллеры 9060 трешки, опробую на них.
В общем, путь я начал.
Вот сервоподвес: