





DJI Naza M Lite + GPS, мини обзор
Привет всем пикабушникам и всем тем, кто планирует или уже вовлечен в собственноручное конструирование квадрокоптеров и мультикоптеров.
Как я вижу, мой пост будет первым в нашем сообществе, ну и я так же впервые пишу на что-то обзор. Строго не судите.
Начну с начала.
Очень давно загорелся идеей пилотировать летательный аппарат и после неудачной покупки и последующего крушения пенопластового самолета, который в принципе летать не должен был, взгляд мой пал на квадрокоптеры. И, естественно, желание собрать его самостоятельно, учитывая ассортимент и цены у наших китайских друзей, затмило дорогие готовые решения. Ну и, волею судеб, почти сразу попались мне 2 мануала, одного из пикабушников:
http://pikabu.ru/story/stroim_kvadrokopter_chast_1_detali_39...
http://pikabu.ru/story/stroim_kvadrokopter_chast_2_sborka_40...
Ну и понеслась! Заказал себе всего, проводочки-коннекторы с запасом, паяльник купил нормальный. Кому интересен список комплектующих, по запросу оставлю в комментах со ссылками на китайцев.
С контроллером получилась беда, заказанный китайский APM 2.6 до меня так и не доехал, до сих пор открыт спор с продавцом, и решено было купить в Москве APM 3.1 вот такой:

Резюме по данному контроллеру будет коротким: говно. То ли мне так повезло, то ли действительно ожидать от китайских девайсов стабильной работы - верх наивности, не знаю. Но: постоянно слетает прошивка, прошивается он танцами с бубном: через ПК Mission Planner после очередного заскока прошиваться отказывается, но через MacOS APM Planner почему-то прошивается, а версия прошивки отличается от ПК. И после прошивки через MAC, нормально прошивается через ПК. Далее - разъемы не стандартные, а уменьшенные, приходилось колдовать с проводами. Ну и последним разочарованием был внешний GPS. Установив его разницы вообще никакой не ощутил (установил 100% правильно, ножку на плате контроллера перерезал, что бы включился внешний компас). Его так же куда-то постоянно уносило и как бы я его не калибровал, слушался мой летучий аппарат меня с трудом.
И тут в руки ко мне попадает DJI Naza M Lite + GPS:
Прикольно выглядит даже коробочка.
Содержимое:

Стоечка под GPS-модуль, наклеечки различные, сам GPS-моудль, проводочки 3-pin, модуль питания, модуль с индикационным светодиодом и usb-входом. Плюс usb-провод, но на фото его нет.
GPS-модуль и индикация с usb подключаются к контроллеру в специальные слоты, с уникальными разъемами, каждый на контроллере подписан.
Модуль питания припаивается к плате распределения питания:

Далее, по стандартной схеме: устанавливаем сам контроллер, кстати, на сколько я понял, не обязательно его устанавливать на антивибрационную пластину, т.к. внутри есть какая-то виброизоляция. Подключаем провода от приемника к контроллеру. У Naza все довольно интуитивно:
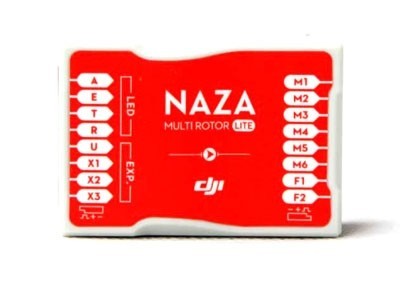
К портам контроллера соответственно подключаются порты приемника отвечающие за следующие каналы:
A - канал Aileron - наклоны влево/вправо
E - канал Elevator - наклон носа вверх/вниз
T - канал Throttle - шаг-газ
R - канал Rudder - рысканье (вращение относительно вертикальной оси)
U - канал управления режимами полета
X1 - можно настроить регулировку подвеса для камеры или чувствительность параметров полета (это очень длинная тема, на этом остановлюсь позже, если обзор придется вам по душе).
X2 - переключение режимов интеллектуального полета IOC (так же обзор по режимам планирую описать в дальнейшем).
X3 - порт подключения контроллера питания.
M1-M6 подключение моторов. F1-F2 подключение подвеса.
После подключения приемника и модуля питания:

Кстати, светодиод на контроллере с usb-входом - ооочень яркий, в темное время суток коптер будет заметен 100%. У меня закреплен так:

В конечном итоге мой летательный аппарат выглядит так:

Сегодня буду проводить тестовые полеты, об этом отдельно отчитаюсь обязательно.
Итак в финале имеем:
Качество сборки восхитительное. Очень качественный пластик, мягкие провода, присутствует даже, так называемая, "защита от дураков", родные компоненты не правильно подключить не получится.
ПО интуитивно понятное (опять же, если кого-то эта статья оставит не равнодушным, все подробно опишу в дальнейшем). Плюс, есть информация, что Naza M Lite по электронным составляющим ничем не отличается от Naza M v2 и Lite можно прошить до v2.
Минусы: ценник ни разу не демократичен. Но я очень надеюсь, что оно того стоит ;)
На этом заканчиваю. Если есть вопросы, обращайтесь, без ответа никого постараюсь не оставить. Последний раз: если моя манера изложения и тема в принципе будет востребована, с радостью продолжу делиться своим опытом.
Специально для Pikabu и сообщества DIY Drones.
Спасибо за внимание! ;)
Показать полностью
8

Продолжение похождений реальной копии городского сканера из игры Half-Life 2


Вот немного отснял нового, не так атмосферно, но зато никто уже не скажет что это фейк))
Показать полностью
1
1


DIY Drones
Сообщество о сборке, настройке, полётах на самодельных квадрокоптерах: как гоночных, так и "обычных".
Ранее мной были созданы два поста на тему гоночных квадрокоптеров.
Первый — видео отличного пилотирования гоночного квадрика: http://pikabu.ru/story/_4269234
Второй — первая часть небольшой серии постов про то, как такие квадрокоптеры устроены: http://pikabu.ru/story/_4282060
Многим Пикабушникам данная тема показалась очень интересна: в комментариях разрослись целые обсуждения: компонентов, рам, всевозможной электроники. Также возникло очень много вопросов, на которые мы старались ответить, дать совет.
Тема весьма интереса. И я думаю, что такое сообщество будет пользоваться некой популярностью. К тому же я советовался с Пикабушниками всё в тех же комментариях — меня поддержали.
P.S.: уже есть сообщество http://pikabu.ru/community/quadrocopter, однако по тематике постов оно несколько отличается от нашей задумки: тут больше идёт речь о готовых квадриках, о чём свидетельствуют тэги: DJI Phantom, DJI Inspire.

Показать полностью
1
Итак, дрон летает и видео готово! Будет интересно не только фанатам Half-Life)



Сделанная с нуля в натуральную величину копия дрона City Scanner из компьютерной игры Half-Life 2. Длинна 80 см, высота 55 см. Несущая рама по схеме квадрокоптера сделана из карбонового профиля 15X15 мм, диагональ рамы 39 см. Полетное время 11 минут. Основные используемые материалы: углепластик (карбон), пенополистирол. Полетный контроллер DJI Naza-M Lite без gps, двигатели AX-2810Q-750KV Brushless Quadcopter Motor, Afro ESC 30Amp, трехлопастные винты 9",аккумулятор: 3300mAh 4S 30C.
Делал два месяца, не регулярно, в домашних условиях. Летает стабильно, практически как квадрокоптеры классической схемы, но все же летать лучше в отсутствии ветра.
Видео снято на камеру GoPro 3 Black, монтировалось в Vegas Pro 13.0, никак не обрабатывалось, никаких спецэффектов не использовалось.
Изначально была установлена фотовспышка, но быстро сгорела, пришлось наложить этот эффект из игры, но планирую устранить этот недостаток в ближайшее время, а также установить камеру с видеопередатчиком.
Спасибо всем, кто оценил мою работу, а также хотелось услышать предложения по поводу идеи следующего проекта, но это должно быть что-то ещё более уникальное, сложное и невозможное, иначе уже неинтересно будет делать, этот проект должен быть вызовом, мне очень нравится, когда говорят: "Это не полетит!","Это не возможно!")))
Music: Half-Life 2 (Game Music)
И видео:
Показать полностью
3
1
Доделал копию сити сканера из игры Half-Life 2, на днях облетаю и сниму видео

Тем кто не видел,в предыдущих моих постах можно посмотреть видео о начале изготовления

Сможете найти на картинке цифру среди букв?
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi
Делаю летающий City Scanner из Half-Life 2




И короткое видео:
Показать полностью
3
1