

APM 2.6 + Droidplaner 2, автопилот летает по точкам(демонстрация)
На видео показан полёт по точкам с использованием полетного контроллера APM 2.6 и программы для Android - Droidplanner 2.

Полетный контроллер APM 2.6(ArduPilot Mega) является полноценным решением БПЛА (Беспилотного Летающего аппарата UAV), который позволяет помимо радиоуправляемого дистанционного пилотирования - автоматическое управление по заранее созданому маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук, DIY) и ведение журнала во встроенную память.
Программа для планшета DroidPlanner 2, она требует наличия OTG от Android устройства. При съемках был использован Chuwi Hi10 Pro.
By #Techn0man1ac aka #MrПоделкинЦ
Показать полностью
1


Первые шаги в мире квадрокоптеров
Недавно, я стал счастливым обладателем чудо-машины, а именно – квадрокоптера. Хотелось бы поделиться с вами своими ощущениями, а так же некоторыми подробностями сборки и эксплуатации данного пепелаца.
Пару недель ушло на постройку (строил в свободное время после работы, суммарно потратил примерно 16 рабочих часов). Больше всего ушло времени на пайку и предварительную калибровку летного контроллера. Благо в интернете куча инструкций как текстовых, так и видео (спасибо каналу AlexGyver за пошаговую видеоинструкцию).


Процесс сборки квада в режиме "на коленках"!)

И вот он оказался готов. Первый полет. Взлёт, вроде все стабильно, но момент зависания в одной точке не очень стабильный, решил добавить немного газа. Далее все произошло очень быстро, я бы даже сказал мгновенно: перегазовка, сброс оборотов, опять перегазовка, и просадка почти до пола, перегазовка и финальное падение. Признаюсь честно, в этот момент я чуть не заплакал, ибо после двух потраченных недель на постройку разбить квад в первые десять минут - бесконечно обидно. ( К сожалению фоток или видоса нет - как то в тот момент не до фотика было)
Потом был заказ новой рамы, перестройка части коптера и сборка. Повторная предполетная настройка летного контроллера подключение телеметрии и освоение программ для снятия показаний телеметрии через телефон. Парочка пробных полетов на высоте не более 30-50 см, очередная перекомпановка оборудования на раме квадрокоптера для лучшей развесовки и компактности, дабы ничего не попадало в винты во время полета.

Важным элементом при создании квада стала виброразвязка,которая гасила вибрации (спасибо, кэп!), которые передаются от двигателей корпусу, тем самым сводя с ума летный контроллер.

Для зарядки аккума использую Imax B6 mini, видосов по использованию IMAXа в интернете полно, так что не буду на это сильно останавливаться. При необходимости ссылки на imax и аккум могу оставить в комментариях.

И вот, наконец-таки сегодня состоялся большой первый тест на открытом воздухе.
С гордостью могу сказать, что тест прошел удачно, хоть и не обошлось без потерь (сломанный луч рамы), но об этом позже.
Сначала о хорошем: квад летает, очень четко реагирует на действия пилота, неплохо зависает на одном месте, хотя есть ещё над чем работать. Телеметрия в связке с телефоном просто поразила мое сознание! (иcпользуюпрограмму Tower для Android) И тут я, пожалуй, остановлюсь поподробнее: есть примерно с десяток режимов, но я остановлюсь на трех самых интересных на мой взгляд.
Первый – возвращение «домой». За «домашнюю позицию» принимается точка взлета. В этом режиме квадрокоптер выходит на высоту пятнадцати метров, летит по прямой к точке взлета и садится. Использовать особенно удобно при парковке или когда садится аккум, а на маневры просто нет времени.
Второй режим – взлет/посадка, опять же помогает новичкам типа меня, если базовые навыки не отточены или вы просто потеряли квадрокоптер из вида и понимаете, что вариант вернуться домой не доступен, так как есть большое количество препятствий. В этом режиме тогда можно просто посадить квадрокоптер, а вы идёте к нему ножками, ориентируясь по координатам с GPS.
Третий режим – самый интересный, с моей точки зрения, – это режим следования за пилотом. Квадрокоптер на основе показаний своего GPS-модуля и данных с телефона может находится на заданных высоте и расстоянии от пилота (читай, телефона). Соответственно, при движении пилота квадрокоптер двигается вместе с ним, выдерживая при этом заданную дистанцию. Особенно интересен для съемок, но подробнее смогу описать когда повешу камеру на дрон.
Навыков пилотирования, конечно, у меня достаточно мало, но я над этим работаю (практика наше всё!). Базовые движения (полеты на одной высоте с разворотами и т.д.) уже получаются уверенно, что, надеюсь, заметно на видео. Во время следующих полетов я планирую закрепить базовые фигуры и переходить к более сложным манёврам. Буду стараться комбинировать варианты изменения высоты и прямолинейного движения.
Теперь о потерях, в процессе проверки режима полета по точкам (это когда ты указываешь точку на карте, а квадрокоптер туда летит самостоятельно) квад завалился и ударился об землю, сломав при этом один луч (знакомая травма :)). Причина была простой: алгоритм полета по точкам предполагает, что квад уже находится в воздухе, а не стоит на земле, а я думал, что он сам взлетит и долетит, куда надо. При падении квада испугался, конечно, но главное –движки целы, плата в порядке, а запасной луч у меня остался ещё с прошлой катастрофы))!

Итог: практиковаться надо и дальше, в планах повесить на квад камеру и first person vision систему. Если кому интересно – пишите, расскажу, что сам теперь знаю о полетах и настройке.
P.S. Спасибо огромное моему лучшему другу Лёхе за организацию сегодняшних полетов и съемку!
P.P.S. Есть ещё видео с полетов, но к сожалению, мне не хватает рейтинга, чтобы опубликовать, так что я оставлю ссылки в комментариях. (Снималось всё на Sony z3 compact)P.P.P.S. Это мой первый пост, так что не судите строго(
Показать полностью
7

Хочу заняться авиамоделизмом. С чего начать?
В своих предыдущих постах
Как я строил квадрокоптер и
Авиамодель из подручных материалов
я рассказал о строительстве летательных аппаратов. Получил несколько комментариев, что мой пост похож на инструкцию "Как нарисовать сову". Что ж, это справедливо в какой-то мере. К тому же я вспомнил, что достаточно давно писал статью на эту тему на одном авиамодельном портале, ну и хотел просто дать ссылку на материал, но выяснилось, что ссылки некоторые в статье устарели, поэтому она нуждается в переработке.

Итак. Все описываемые аксессуары потребуются и для строительства моделей самолетов и для коптеров и вертолетов, с небольшими нюансами.
Кроме того, все ссылки, которые я дам в этой статье нисколько не говорят о том, что на этом именно сайте нужно покупать именно это оборудование, просто стараюсь выбрать какие-то примеры и чтобы на родном языке что-то прочитать о товаре можно. Как правило, такое же можно купить дешевле. Статья будет длинной, но если кому-то хочется стать авиамоделистом или коптероводам "с нуля", то очень полезной.
Итак, начнем. Начинать свой путь в авиамоделизме лучше всего с теории. Однако часто так случается, что человеку хочется просто построить быстро модель и поднять ее в небо. Таких людей немало, это хорошо заметно на авиамодельных форумах, поэтому пришла мысль написать все очень просто для совсем новичков, как максимально быстро построить летающую радиоуправляемую модель для начинающих. В этом материале я выскажу свой взгляд на упрощенный вариант вхождения в авиамодельное хобби.

Купить или построить
Сразу хочется предостеречь от покупки в магазине радиоуправляемой игрушки, если вы не хотите разочароваться. Скорее всего, первый полет закончится плачевно. Вы, конечно, отремонтируете ее при помощи клея, от этого увеличится вес, возможно модель станет кривоватой и летать будет не так хорошо, а использовать имеющуюся в такой модели начинку для другого самолета практически невозможно.
Но это не говорит о том, что нельзя купить готовую модель. На авиамодельных сайтах продаются всевозможные наборы. Это наборы Ready to Fly (RTF) – готовые к полету. Докупить нужно лишь батарейки. Недостаток в том, что они обычно комплектуются дешевыми, не совсем хорошими аппаратурами управления, ну и другими комплектующими, использование которых в дальнейшем тоже достаточно затруднительно. И весь опыт от такой модели может свестись к первому варианту. Наборы PNF – подключи и лети - не включают в себя аппаратуру управления. Это уже лучше, потому что ее вы можете выбрать сами. Их недостаток в том, что они могут комплектоваться достаточно экзотическими вещами, например трехлопастными пропеллерами с редкими характеристиками, при поломке которых может выясниться, что трудно подобрать замену. Наборы Almost Ready to Fly (ARF) включают в себя собственно модель без начинки. Может стоять двигатель. Остальное нужно поставить самому. Это еще лучше, но как оно летает? Мы же ведь авиамоделисты, не так ли? Может потратить несколько вечеров и изготовить модель? Однако статья может оказаться вам полезной независимо от того, какой вариант вы предпочтете.
Направлений в авиамоделизме великое множество – это гонки и пилотаж, планера и воздушный бой, и так далее и так далее. Мы же остановимся на тренировочной модели, легко управляемой, недорогой и в то же время ремонтопригодной. Как выглядит такая модель? Самый распространенный классический вариант – это высокоплан (крыло расположено выше оси мотора), с некоторым V (концы крыльев приподняты вверх). Такой вариант позволяет модели легко стабилизироваться в прямом полете. Такую модель можно приобрести в магазине, но лучше всего ее построить самому. Тут я рекомендую замечательную модель Цессна-150, чертежи которой и нюансы постройки можно найти здесь: http://rc-aviation.ru/cessna-150.
Рекомендуемй сетап возможно устарел, поэтому давайте рассмотрим, что же нужно еще для того, чтобы оборудовать действующую радиоуправляемую модель.
Радиоаппаратура управления
В первую очередь нам потребуется аппаратура управления, состоящая из передатчика (пульт управления) и радиоприемника, устанавливаемого на модели.

Выбор аппаратуры дело очень личное, цены очень различны, как и функционал. Одна из основных характеристик аппаратуры – количество каналов. Я бы порекомендовал не менее 6-ти даже для начинающего моделиста. Сам я пользовался аппаратурой «Спектрум», вот такой . Однако можно найти и более бюджетные варианты:
Соответственно, у бюджетной аппаратуры качество может оказаться ниже и набор дополнительных функций меньше. Если хотите управлять вертолетом, надо смотреть, есть ли такие режимы.
Другой важный фактор – это расположение ручек управления (стиков) на передатчике. Если, например, газ слева, то это mode 2, а если справа, то mode 1. Безусловно, есть и варианты 3 и 4, однако большинство моделистов – правшей пользуются аппаратурами, у которых газ слева, чтобы основное управление моделью находилось на правой руке. Вообще выбор аппаратуры дело очень личное, поэтому придется все же почитать отзывы, посмотреть, посоветоваться.
Двигатель
Для такой модели бесколлекторный электромотор-аутраннер – самое подходящее. Причем с характеристиками 1100-1500kv, напряжением питания 7,4-11,1в и тягой 850-950г.

Что же такое 1100-1500kv? Это означает оборотов на вольт. Например мы выбираем для этого самолета мотор Turnigy Aerodrive SK3 - 2830-1130k. питаться он будет от батарейки напряжением 11,1в. Маркировка его, таким образом, обозначает следующее – 28-30 – это размер в мм, 1130kv – это 11,1х1130=12543 об/мин. – максимальные обороты двигателя. То есть, чем выше напряжение, тем выше обороты. Однако, этот мотор рассчитан на максимальное напряжение 11,1в. Еще одна важная характеристика – это максимально допустимый ток. В нашем случае это 20А. Чем больше пропеллер, тем больше ток. Превышать разрешенный не рекомендуется, ибо мотор перегреется и сгорит. Даже если и не сгорит, перегрев отрицательно влияет на неодимовые магниты мотора, которые теряют свои свойства, и мощность мотора падает. Таким образом, мы видим, что очень важно правильно подобрать пропеллер. Можно посмотреть в описании мотора рекомендуемый пропеллер, можно почитать рекомендации пользователей, но лучше всего проверить самому. Этот процесс рассмотрим в дальнейшем.
Регулятор оборотов
Для столь простой модели не нужны особо серьезные регуляторы. Подбираем его по току и напряжению. Поскольку максимальный ток у нас предполагается 20А, а напряжение батареи 11,1 вольта или 3S, то регулятор с такими параметрами нам и нужен.

Но есть один нюанс. Производители регуляторов из Китая нередко завышают максимально допустимый ток, поэтому нужно брать регулятор с запасом. Причем даже не по максимальному току, а по номинальному. Например: возьмем регулятор не слишком дорогой Его параметры 25-35А , напряжение 2-4S нас удовлетворяют. Ну и кроме напряжения и тока там имеется такой параметр, стабилизатор питания ВЕС:2А. Это означает, что у регулятора имеется выход для питания приемника и сервомашинок. Без наличия такого выхода регулятор брать не стоит, потому что потребуется дополнительное питание.
Аккумуляторная батарея
Литий-полимерные аккумуляторы, используемые для летающих моделей, тоже имеют некоторые параметры. Для нашей модели подойдет аккумулятор вот такой. То есть 1300mAh 3S 30C Lipo Pack.

Маркировка аккумулятора включает в себя тип аккумулятора Lipo, емкость 1300мАч, количество элементов (банок) по 3,7в в батарее – 3S и токоотдачу 30С. Ну с типом и емкостью все понятно, напряжение номинальное будет 3х3,7=11,1в. А вот токоотдача… Максимальный ток нашей силовой установки 20А. Токоотдача аккумулятора – это емкость х 30С, то есть 1300мАч=1,3Ач, 1,3х30=39А. При полном заряде аккумулятор способен отдать 39А, что нас устраивает. Однако не стоит обольщаться, при снижении емкости аккумулятора при разряде, снижается и токоотдача, поэтому аккумулятор 20С такой малой емкости лучше не использовать. Он будет быстро садиться, быстро вздуется и выйдет из строя.
Аккумулятор 40С лучше, но дороже и тяжелее, поэтому при выборе лучше придерживаться разумной достаточности. Некоторый недостаток литий-полимерных аккумуляторов в том, что они очень требовательны к «правильной» зарядке, балансировке напряжения на каждой банке и хранению. Для его зарядки нужно зарядное устройство. Например такое.
Или более дорогое, но удобное - его можно использовать для зарядки любых аккумуляторов.
Такое устройство имеет функцию подготовки аккумулятора к длительному хранению и параметры зарядки отображаются на дисплее для визуального контроля. Питается такое устройство постоянным током, напряжением 11-17в, то есть от автомобильного аккумулятора.
В домашних условиях можно воспользоваться блоком питания на 12в, однако он должен обеспечивать ток не ниже 5-7А, поэтому дешевле использовать блок питания от системного блока компьютера, ну или не заморачиваться и купить специальный. Батареек, если есть возможность, можно купить пару. Тогда, ожидая пока зарядится одна батарейка, можно полетать на запасной. О чем еще следует знать. На батарее, где-нибудь сзади, написан максимальный зарядный ток, например 2С, что означает, что нашу батарейку можно заряжать током 2,6А. Однако это не совсем так. Когда батарея разряжена, у нее низкая емкость, поэтому лучше заряжать током 1С – 1,3А, а лучше 0,75С – 1А, а в процессе зарядки, когда зарядится на четверть добавить до 1,3А, а после половины можно и до 1,6. Несколько слов о емкости. Можно прикинуть, что при токе в 20А этой батарейки хватит на 1,3/20=0,065ч или 4мин. Но, во-первых, в полный газ никто не летает постоянно, а во-вторых – даже 2 минуты по первости вызывают дикое напряжение всех моральных и физических усилий с повышенным потоотделением.
Пропеллеры
Остановимся поподробнее на пропеллере. В этом нам поможет рисунок:
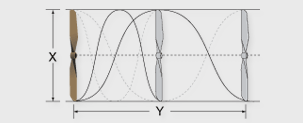
Пропеллеры имеют 3 основные характеристики – шаг, диаметр и направление вращения. Мы будем использовать пропеллеры нормального вращения, так что остановимся на остальном. Сразу оговорюсь, что к этому мотору я пропеллеров не подбирал, но предполагаю, что можно использовать пропеллеры от 10х3,8 до 8х8. Легкие, но достаточно жесткие, примерно такие . Первое число – диаметр в дюймах (на рисунке Х), второе - шаг (на рисунке Y) – то есть расстояние, которое пройдет пропеллер в плотной среде за 1 оборот. Соответственно, чем больше шаг, тем больше скорость, чем больше диаметр, тем выше тяга. Поэтому предлагаю запастись несколькими вариантами, например 10х3,8, 9х5, 9х6, 8х7 и 8х8. По этим параметрам можно прикинуть максимально возможную расчетную скорость аппарата. Конечно, на практике она будет ниже, тут еще кпд и все остальное, но вот эдак, для 10х3,8: Переводим дюймы в метры 3,8х2,54/100=0,097 переводим обороты двигателя в обороты в секунду: 11,1х1130/60=209. Перемножаем, получаем 0,097х209=20м/с или 72км/ч.
Для начала такая скорость нам и нужна, к тому же в реалиях она будет меньше. При использовании винта 8х8 – скорость буде вдвое выше. Подбираются-проверяются винты по току. Нам нельзя превышать 20А. Поэтому потребуется измеритель мощности. Я использую такой . Подключаем, добавляем плавно газ, ток не должен превышать максимальный 20А больше, чем на 5%, а лучше и вовсе не превышать. Если ток существенно меньше, например 15А, значит мощность двигателя используется неэффективно и пропеллер нужен побольше.
Сервомашинки
Для управления рулевыми поверхностями нужны сервомашинки. Не буду многого о них писать, для этой модели подойдут самые народные HXT900 (9-граммовая микро-сервомашинка)
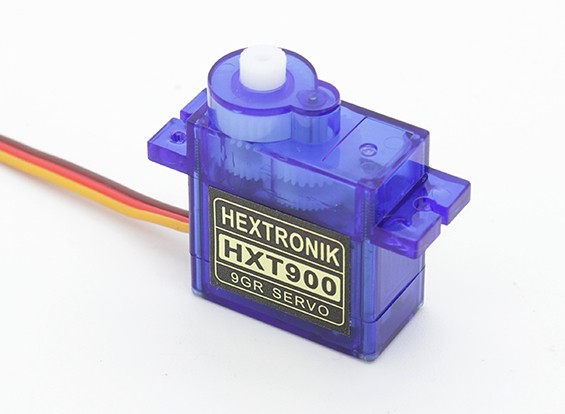
Для установки их нужно 4, но советую взять 1-2 в запас – при ударах о планету их капроновые шестеренки часто не выдерживают.
Если все же построить самому
Теперь пару слов о постройке модели Цессна-150. Прочитав внимательно инструкцию автора, в которой он оговорился, что у некоторых моделистов получается задняя центровка (на этом остановимся позже), я распечатал чертежи, склеил их, а затем просто взял карандаш и от руки изменил чертеж, сдвинув кабину и соответственно место крепления крыла на 25мм назад. Получилось после постройки то, что надо. Тем более, что модель я оклеил цветным скотчем. Для гигиеничности и эстетики.

Перед полетом модель необходимо настроить. Главное – центровка. Для такой модели я бы порекомендовал 20%. Что это значит? Поскольку крыло прямоугольное, то все просто. Отмеряем от передней кромки крыла 1/5 часть его ширины, вот на этом месте центр тяжести модели и должен находиться. Как этого добиться? Тут поможет удлиненный нос, помните мы сдвинули кабину назад? Перемещая тяжелую батарейку вперед-назад, добиваемся нужного эффекта.
Чем интересна эта модель? После того, как вы научитесь худо-бедно управлять самолетом, можно строить другие его варианты. Например, сделав крыло тоньше и поставив винт с большим шагом, можно получить достаточно скоростной самолет-тренер. Сделав профиль крыла не плоско-выпуклым, а симметричным и опустив его пониже, увеличив площадь рулевых поверхностей, вы получите самолет-тренер, способный выполнять некоторые фигуры пилотажа. Уменьшив длину фюзеляжа и размах, опустив крыло пониже и сделав его прямым, а также избавившись от руля направления (сэкономите 1 сервомашинку), можно получить тренер для воздушного боя.

Более подробно останавливаться на настройке модели я не буду, потому что это тема отдельной статьи, к тому же на этом сайте есть прекрасный материал на эту тему.

Как научиться управлять моделью
Необходимо, однако, остановиться непосредственно на полетах, перед которыми, все же, лучше получить необходимые минимальные навыки. В этом поможет компьютерный авиасимулятор.
Можно подключить к компьютеру радиоаппаратуру с помощью специального шнура, но чтобы не трепать ее, уменьшая ресурс, я приобрел себе примерно такой джойстик – имитатор аппаратуры, с бесплатной программой-авиасимулятором в комплекте . Потом я стал использовать другую, более интересную программу, которых много. Если не получить этих начальных навыков – первый полет добром не закончится. Естественно лучший вариант – это более опытный пилот в помощь. Можно и 2 аппаратуры соединить кабелем тренер-ученик, он и поможет настроить и оттриммеровать модель перед тем, как на ней полетите вы. К тому же запускать модель вдвоем гораздо удобнее. Мой вам совет, посетите мероприятия местных моделистов, познакомьтесь – лишним такое знакомство не будет.
Кстати, начать можно и с покупки такого симулятора, а вдруг вам не понравится управлять моделью. Есть также в программе симуляторы для коптеров и вертолетов.
Подведем итоги
Необходимо еще добавить, что могут потребоваться некоторые мелочи. Например, разъемы для подключения мотора к регулятору и регулятора к батарее. Иногда такие разъемы идут в комплекте с мотором, иногда нет. В комплекте с регулятором разъемов не встречал никогда. Для мотора вот такие используются в большинстве случаев – 3,5мм бананы Их необходимо припаять, аккуратно заизолировав термоусадкой.
Для батареи я использую такие же, но 4мм, однако это как кому нравится. Можно припаять на регулятор такой, какой уже установлен на батарее.
Итак, подведем итог, что же требуется для оборудования модели самолета.
Аппаратура управления с приемником.
Электромотор.
Регулятор оборотов.
Сервомашинки 4шт + 1-2 запасных.
Разные пропеллеры (и не по 1 штуке).
Аккумулятор (можно 2).
Зарядное устройство.
Блок питания к зарядному устройству.
Измеритель мощности (очень желательно).
Разъемы для подключения двигателя и батареи.
Шнур к аппаратуре управления для подключения ее к компьютеру (если нет в комплекте), а лучше всего джойстик для авиасимулятора.
Соответственно, если вы не строите модель сами, а покупаете набор, то докупить то, чего там нет. Надеюсь все же, что вы, как и я, захотите изготовить модель самостоятельно. На такой Цессне-150 научился летать мой сын, на ней же совершил первые полеты и я.
Небольшое послесловие.
А в чем же нюансы для коптеров и вертолетов.
Для коптеров: Вам не понадобятся сервомашинки, но понадобится полетный контроллер.
Регуляторы скорости нужны будут для каждого мотора, причем лучше всего специальные, для коптеров, они быстро реагируют на управление. К винтам нужно удет подойти более тщательно - они должны обладать достаточной жесткостью и прочностью, ведь коптер в воздухе на них висит, а не на крыльях.
Для вертолетов: Это отдельная тема, но впрочем, сервомашинки должны быть цифровыми, двигатель и регулятор специальными, вертолетными, ну и потребуется контроллер или гироскоп.
Показать полностью
11
Как я строил квадрокоптер
В прошлом посте я рассмотрел постройку авиамодели. Квадрокоптер - не модель, почти все придется купить - Моторы, регуляторы хода, контроллер, батарейки, построить нужно лишь раму для всего этого, а это несложно, лишь бы ровная была и прочная.
Для рамы как всегда приобрел все в строительном магазине и нашарил по углам. Покажу небольшой фотоотчет о постройке.
Берем квадратный алюминиевый профиль, уголок, полосу, контейнер пищевой, кусок текстолита, винтики-гаечки и приступаем.

Запиливаем профиль, чтобы соединить крест-накрест.

С помощью эпоксидки и винтов крепим площадку и текстолита.

Закругляем кусочки алюминиевого уголка, прикручиваем, получились площадки под моторы.

По шаблону красиво загибаем полосу под ножки. Как потом выяснилось, ножки при грубой посадке иногда гнутся, потом уверенной рукой выпрямляются - и весь ремонт. Возможно и не стоило так аккуратно изгибать их, но надо же какой-то изначальный вид иметь.

Крепим ножки.

Устанавливаем моторы

Крепим крышку от пищевого контейнера, устанавливаем контроллер, регуляторы хода, приемник, с помощью цветного скотча добавляем цвета, чтобы было видно, где перед, где наоборот.

Снизу прикручиваем площадку для батареек, закрываем электронику пищевым контейнером.

Устанавливаем винты и все.

Собственно после этого, настройки, калибровки, первые полеты, понимание, что тебе летать не дано, а сын это делает превосходно. Ну что ж, не все рождены летать. А потом, когда уже построишь новый гексакоптер, этот квадрокоптер можно снабдить костюмом с подсветкой и развлекать друзей и зрителей вечером на авиамодельном шоу.

Зрители это воспринимают на ура. Всем весело.

Показать полностью
12

