
Внутри коллектора
Внутри коллектора на дроне.
Внутри коллектора на дроне.
Напоминаю, что это серия постов о том, как научиться летать фристайл на квадрокоптере. В моём самом первом посте есть примеры видео фристайла, крутите вниз. Чтобы летать мы соберём квад сами, а чтобы собрать, покупаем правильные компоненты. Cегодня рассматриваем курсовую камеру.
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
5. Моторы.
6. Регуляторы.
Камера формирует изображение, по которому мы будем летать. Качество этого изображения в аналоговом стандарте не самое хорошее, гораздо лучше качество в цифровом стандарте фирмы DJI. На "цифру", возможно, даже перешло большинство фристайл пилотов и если вас не смущают дополнительные расходы и хочется качественной картинки (720p если быть конкретным), то DJI - ваш выбор. Я готов консультировать в телеге (ch347 - CHEAT:) по этой системе, но в гайде собирать мы будем аналог (в смысле аналоговый сигнал, а не подобие), для разумной минимизации расходов. С нашим рублём я и сам посматриваю в сторону DJI, останавливает только движуха у конкурентов, точнее их наличие, наконец.
Выбрать камеру немного проще чем остальное железо, так как достойные камеры делают только 3 фирмы: Runcam, Foxeer и Caddx.
Все упоминания разрешения в спецификациях можно смело игнорировать, стандарт передачи даст нам фиксированное разрешение на любой камере.
Есть отдельный тип камер - с возможностью записи в высоком разрешении, то есть помимо основной функции передачи изображения стандартного качества на видеопередатчик (через полётник, как мы помним), та же камера в высоком разрешении (от FullHD до 4K) записывает на флешку видеофайл, для этого с камерой идёт плата (а то и две) стандарта 30x30 которая крепится в стэк (пример: Runcam Split).
Есть варианты с таким же функционалом, но с двумя объективами отдельно, под стандартное и высокое качество (пример: Caddx Tarsier).
Эти варианты мы рассматривать не будем в гайде, все их плюсы и минусы в телеге расскажу интересующимся.
Камеры отличаются размерами:

Некоторые 5 дюймовые рамы могут быть рассчитаны на размер камеры mini и меньше, на это нужно обратить внимание при покупке. Обычно в комплекте с маленькой камерой идёт адаптер на больший размер.
После размера нужно определиться с соотношением сторон изображения, это 4:3, 16:9 или настраиваемый. Тот же параметр будет при выборе очков, и будут доступны те же три варианта. Если камера и очки с разными соотношениями, картинка будет искажена (сжата или растянута).
Можно зайти на официальные сайты производителей и увидеть свежие модели камер, из них и выбирать. Камера может иметь функцию управления по UART, если есть, будет неплохо, нет - переживём. Угол обзора выбирать не придётся, у всех современных камер он годится. Runcam Phoenix 2 Joshua Edition, к примеру, отвечает всем требованиям (размер micro, соотношение настраивается, UART есть).
Отличия дорогих от дешёвых не привожу, так как у этих трёх фирм жёсткая конкуренция как по качеству, так и по цене и вы получите ровно то, за что заплатили.
Получилось коротко, поэтому добавлю несколько слов про приёмник, эта тема точно на пост не потянет.
Приёмник конвертирует команды полученные от аппаратуры по радио в сигналы по проводам полётнику.
Так как мы решили использовать ExpressLRS, выбор приёмников у нас невелик, главное чтобы была внешняя антенна и частота совместимая с нашей аппаратурой - 2.4ГГц. Это модели Happymodel EP1, BetaFPV Nano и Matek R24D аж с двумя антеннами. Есть ещё noname приёмники дешевле, очень возможно, что они вполне рабочие, так как спецификации стандарта открыты.
Следующая серия - видеопередатчик.
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
5. Моторы.
6. Регуляторы.Полётный контроллер - основной вычислительный центр квада. Имеет обычно на борту: микроконтроллер, акселерометр и гироскоп (разные вещи, без акселерометра можно летать акро) и, иногда, барометр; схему OSD (on screen display), несколько интерфейсов UART и I2C, USB разъём (сейчас Type-C потихоньку вытесняет microUSB), слот для microSD карты, светодиоды и кнопки.
Поехали подробно:
1. Микроконтроллер. Историю опустим, сейчас типичный полётник имеет контроллер фирмы STMicroelectronics семейства F4 или F7, всё остальное либо неактуально, либо несовместимо с прошивкой Betaflight, либо нетипично. Понятноe дело контроллеры различаются тактовой частотой, памятью и прочими фичами. Нам важно знать лишь то, что на процессорах F4 и F7 доступен полный функционал Betaflight. До кризиса микроэлектроники я не видел особой разницы в цене и покупал исключительно F7 полётники. Ну и для ясности картины о маркировке: в семейство F4 входят процессоры F405 и F411, в семейство F7 - F722, F745 и F765.
Скорей всего мощный процессор важен, если мы навесим GPS, гирлянду адресуемых светодиодов, настроим сложные фильтры и захотим летать по точкам; в нашем же деле процессор сгодится любой.
Прошивка на которой всё это работает называется Betaflight и слово "бета" вас не должно вводить в заблуждение - это очень стабильный, долго и уверенно развивающийся и хорошо тестирующийся open-source проект, ни разу я не натыкался на ошибки в прошивке. Прошит контроллер будет с завода, а вот версию желательно будет обновить на свежий релиз, но это в посте о Betaflight.
2. Акселерометр и гироскоп. Разницу, пожалуйста, загуглите, но нам, для чистого акро акселерометр не нужен, но стаб режим для подстраховки неплохо бы иметь. Гироскопов же может быть даже два; одно время два чипа соревновались друг с другом и в некоторые полётники их ставили оба - это тонкости, нам ни к чему. Барометр вычисляет высоту и нам он тоже не нужен, но если есть - переживём.
3. OSD (экранная информация). Через этот чип подключается камера к видеопередатчику. То есть картинка с камеры идёт на полётник, там к этой картинке OSD подрисовывает буквы и цифры (параметры которые нам важно видеть в очках: напряжение батареи, расход батареи, вплоть до авиагоризонта) и далее картинка с параметрами передаётся на видеопередатчик чтобы вещать нам в очки. Настроек море, в посте про Betaflight будут подробности.
4. Интерфейсы UART (и реже I2C). Они используются для общения полётного контроллера с другими внешними устройствами. У нас такими устройствами будут в первую очередь приёмник, с него приходят команды от пульта. Потом видеопередатчик, мы сможем с пульта менять настройки видеопередатчика: канал вещания (частоту) и мощность. И некоторые камеры также могут настраиваться по UART, обычно предлагают обширное меню настройки картинки и отображения доп. информации. Для нашего дела этих интерфейсов будет всегда достаточное количество на полётнике, считать и подбирать не придётся.
5. По USB разъёму у нас происходит подключение к компьютеру (или телефону) для настройки и перепрошивки Betaflight. Без этого мы не сможем настроить квад.
6. Слот для карты, если он есть, позволяет записывать в текстовый файл логи полёта с огромным количеством информации. Есть программы позволяющие на основе логов выдать распределение резонансных частот вашего квада по спектру. Есть софт для стабилизации видео, который в качестве источника стабилизации берёт данные гироскопа. Или просто, если хотите добавить к вашему видео картинку с положением стиков, есть плагины к видеоредактору, позволяющие это сделать, дай только логи. Если слота под microSD карту нет, это не значит, что логи не снять, на борту может быть чип памяти, а логи сливаются по USB.
7. Светодиоды состояния, и кнопка принудительного режима прошивки обычно используются мало, только при отладке проблем.
Основной же работой полётника будет: смотреть на данные с пульта (через приёмник), потом на данные с гироскопа, а в современном конфиге и на данные с моторов (через регуляторы) и, фильтруя наши дрожащие пальцы, порывы ветра, кривые пропы и вибрацию от открутившегося винта рамы, отправлять команды на моторы так, чтобы квад занял положение, которое мы имели ввиду. И это не преувеличение, фильтры современной прошивки эффективно могут распознавать и противостоять широкому диапазону шума во входных данных.
Дорогой полётник от дешёвого может отличаться:
1. Качеством комплектующих и пайки.
2. Комплектацией. Могут быть в комплекте шлейфы для ESC, USB кабель, провода. Практически в любой комплектации будут силиконовые виброгасящие вставки, без них квад летать будет очень плохо. Может быть в комплекте карточка с распиновкой, но в любом случае она будет в интернете.
3. Качеством маркировки. На хорошем контроллере может быть всё написано так, что за распиновкой лезть не придётся.
4. Качеством и удобством площадок для пайки. Маленькие площадки в несколько рядов тяжелее паять, чем крупные со сквозными отверстиями. И сорвать такую площадку сложнее.
Отдельно про форм-фактор.
Есть так называемые AIO (all-in-one, всё в одном) полётники и за свою историю развития значение этого "all" менялось: по началу в "all" помимо полётника входила PDB (power distibution board, плата распределения питания) и полётники выглядели так:
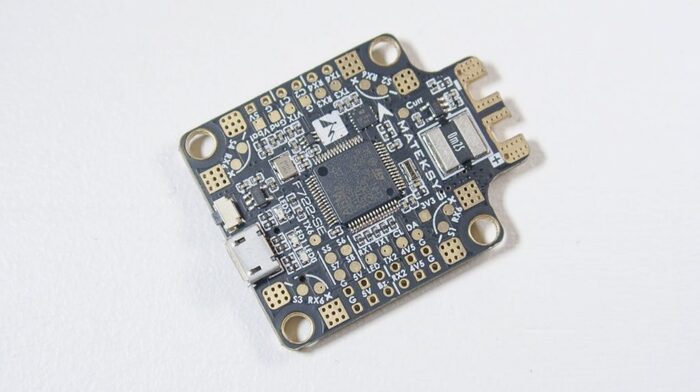
то есть имели на борту батарейный вход (две самые крупные металлические площадки с плюсом и минусом с краю) и удобные площадки для подключения питания отдельных регуляторов (вторые по размеру квадратные площадки у каждого углового отверстия).
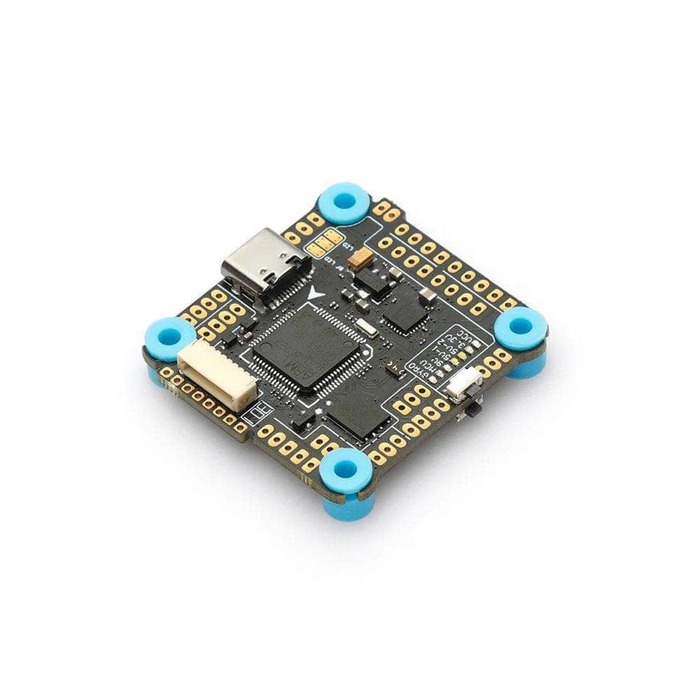
А потом миниатюризация позволила впихнуть на плату регулятор 4-в-1, и полётник стал выглядеть так:

То есть помимо входа для батареи, на плате есть сами регуляторы и 12 площадок для подключения моторов (на двух гранях, по шесть с каждой стороны). С такой платой весь ваш стэк - это одна плата. Минусы такого решения: менять всё, если что-то одно сгорело, температурный баланс часто не самый лучший и выход из строя из-за перегрева более вероятен, ну и как видно, при монтажных отверстиях 30x30, сама плата далеко выходит за эти пределы и это может стать неприятным сюрпризом на некоторых рамах, плюс компоновка идёт по бороде, если по бокам у нас моторы, то USB разъём гарантировано похоронен внутри рамы без удобного доступа. Короче, у нас батарейные площадки будут на регуляторе 4-в-1, соответственно на полётнике их быть не должно.
Дешёвыми были полётники JHEMCU, но толи всё подорожало, толи они в "премиум" подались. Фирмы Matek, Holybro, Betaflight, Diatone с серией Mamba, IFlight и Foxeer делают годные полётники. Легко спутать контроллер предназначенный для крыльев и самолётов, но его обычно отличает гребёнка из стандартных пинов для сервоприводов на контроллере или в комплекте; или слово wing в названии.
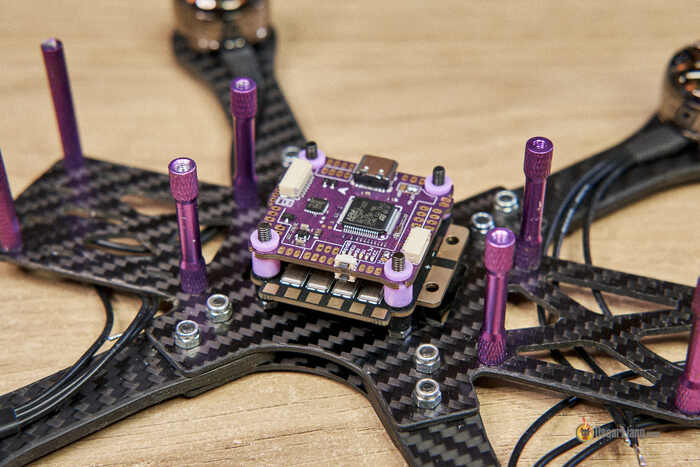
Сочетание полётного контроллера и регулятора 4-в-1 называют стэк (stack, стопка). Точнее всё, что уместилось в одну стопку можно назвать стэком, но продают под этим названием обычно полётник+регулятор. Выглядит так:
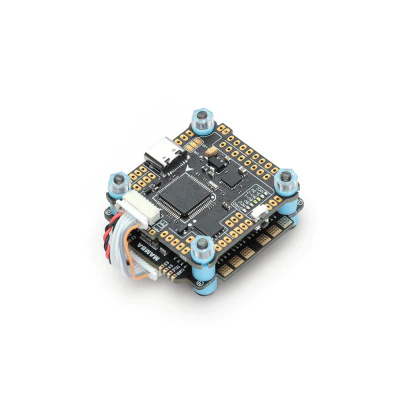
Плюсы такого выбора - во-первых: в комплекте винты, гайки и проставки чтобы всё это вставало с нужным зазором при минимальной высоте, во-вторых: стопроцентно работающий шлейф между полётником и регулятором в комплекте. Почему это проблема? Да потому что никакого стандарта распиновки разъёма регулятора нет, и количество и порядок контактов может не совпадать у шлейфа из комплекта регулятора и ответного разъёма на полётнике (шлейф хорошо виден на картинке). Однако на всех полётниках и на некоторых регуляторах есть отдельные площадки для пайки проводов из шлейфа, так что в любом случае регулятор и полётник можно "поженить". Обычно составляющие конкретной модели стэка есть в продаже по отдельности.
Следующая серия - камера.
Снято на GoPro 7 на FPV квадрокоптере
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
5. Моторы.Регулятор - схема, которая заставляет вращаться бесщёточный трёхфазный мотор (как раз тот, что используется в дроне). Принцип работы мотора мы рассматривать не будем, замечу лишь то, что для вращения такого мотора требуется быстро и согласованно менять ток в трёх контурах. Просто подать напряжение и радоваться, как это делается с щёточным мотором - не получится. С одной стороны к регулятору подключён мотор тремя фазами, с другой - пара проводов питания прямиком от батареи и пара - управления, с полётного контроллера. По этим проводам идёт управляющий сигнал и его формат должен "понимать" регулятор.
Не углубляясь сильно в теорию и историю, скажу, что протокол Dshot600 сейчас максимально широко поддерживается как современными полётниками, так и регуляторами. Если 4 подобные схемы объединить в одну плату по-крупнее, то получится современный регулятор 4-в-1. Компактность, уменьшение веса и простота подключения в плюсах у такого решения, замена всего устройства после выхода из строя одного регулятора - в минусах. Регуляторы характеризуются: 1. форм-фактором, 2. номинальным током 3. максимальным напряжением 4. поддерживаемой прошивкой.
Об этом подробнее:
1. Форм-фактор. Помимо отдельного регулятора и устройства 4-в-1, последние отличаются размерами. Стандартно в любой раме на нижней пластине будут 4 отверстия расположенные по углам квадрата со стороной в 30мм. В эти отверстия мы воткнём длинные винты (на картинке чёрные):

И сверху нанизаем регулятор и полётный контроллер:
Так вот, помимо 30x30 есть стандарт 20x20 (как регуляторов так и полётников) и есть 5 дюймовые рамы, которые предлагают отверстия 20x20 в дополнение к 30x30. Мы этот стандарт использовать не будем, так как надёжный регулятор на достаточный ток в формате 20x20 найти тяжело, а раз регулятор у нас 30x30, то и полётник придётся использовать такого же размера, просто исходя из нашей ситуации с винтами.
2. Номинальный ток. Тут классическая ситуация с китайскими амперами, чем дешевле регулятор тем меньше китайский ампер соответствует международному эталону. То есть 30А брендовых могут не сгореть там, где исдохли 50А по-дешману. Надеюсь информация не шокирует. В общем-то нужный нам диапазон я назвал 30 - 50 ампер. Маркируются отдельные и 4-в-1 одинаково: по номинальному току через один регулятор.
И ещё замечание: квад не будет мощнее, если поставить регулятор на 100 ампер. Регулятор должен выдерживать ток,который запрашивает мотор и отдаёт батарея.
3. Максимальное напряжение. Регулятор может поддерживать либо напряжение до 4S, либо до 6S. Конкретное значение в вольтах никто не пишет, просто совместимость с батареей. Мало того, если мы поставим регулятор на 6S, то он прекрасно будет работать c батареей 4S и у нас будет даже запас по рассеиваемой мощности. Наоборот - ESC на 4S с батареей 6S - нельзя, выпустим волшебный дымок.
4. Прошивка. Для вращения мотора, как уже было сказано, нужно быстро и согласованно менять ток в обмотках, также, пока ток течёт через две фазы, третья может померить наводящийся ток и с этими данными можно что-то сделать полезное. Короче, в каждом регуляторе есть микроконтроллер, а каждый микроконтроллер работает по программе, которая называется прошивкой. Так вот регуляторов грубо говоря два типа: работающие на контроллере поддерживающем прошивку BLHeli_S или - прошивку BLHeli_32. Прошивки развиваются, имеют свой ПК (Windows/Linux/MacOS) софт для перепрошивки и настройки различных параметров и я очень надеюсь, что к моменту, когда мы дойдём до настройки собранного квада, выйдет наконец релиз Betaflight 4.3 (тоже прошивка но к полётному контроллеру), где необходимость лезть в настройки прошивки регулятора будет упразднена. Разница между прошивками в том, что BLHeli_32 работает на более мощных 32-битных контроллерах и имеет лучший потенциал в развитии, однако BLHeli_S переживает сейчас возрождение вместе с маленькими комнатными квадами, и её развитие тоже слабым назвать нельзя, вышло даже несколько альтернативных прошивок с доп. функциями. Мы же остановимся на BLHeli_32 как наиболее функциональной.
На борту типичного 4-в-1 ESC есть вход для батареи, измеритель тока для подсчёта потраченных мАч батареей, преобразователь напряжения на 5В для питания полётного контроллера, ёмкости (конденсаторы) для фильтрации пиков тока\напряжения в линии питания, что сильно влияет на качество видео.
Дорогой ESC может отличаться от дешёвого:
1. Качеством компонентов и пайки.
2. Соответствием заявленным параметрам.
3. Комплектацией. Может быть несколько шлейфов: для стандартной распиновки полётника и для сборки своего шлейфа или вариант для пайки без использования разъёма. В комплекте могут быть провода большого сечения и разъём XT60 под батарейный вход. Также в комплекте может быть отдельный фильтрующий конденсатор.
5. Наличием защиты от переполюсовки. С одной стороны, когда всё правильно собрано, перепутать плюс и минус физически невозможно, с другой - когда вместо квада на асфальте дымящийся фарш, возможно защита спасла нам хоть какой-то компонент.
4. Количеством конденсаторов распаянных непосредственно на плате, то есть качеством фильтрации и нужде в отдельном конденсаторе.
Если затрахал с конденсаторами, то лучше всегда ставить то, что есть в комплекте, и докупать, если в комплекте нет - хуже не будет.
Я был большим поклонником отдельных дешёвых ESC и конечно, несколько сгорело, но собирать мы будем с 4-в-1. Эталоном в мире ESC давно считается Hobbywing XRotor Micro 60A. Фирмы IFlight, Diatone. Spedix, Foxeer делают вполне надёжные регуляторы разных форматов.
Цены я пока воздержусь указывать так как курс на али 70, а в приложении моего банка 58.
Следующая серия - полётный контроллер.
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
У моторов два параметра: размер и KV.
Размер обозначается четырёхзначным числом, например 2206. Значит диаметр мотора 22мм а высота 6мм. Параметр KV - это некая магнитная характеристика, но близко к ней находится параметр "обороты на вольт". То есть мотор с 2500KV даёт примерно прирост 2500 оборотов при увеличении напряжения на один вольт. "Погоди, какой нахрен вольт, мы же переключаем фазы как бешеные, чтоб оно крутилось! Если их не переключать никаких оборотов не будет!" - воскликнет читатель и будет прав. Но оценить мотор по этому фэйк-параметру возможно.
В тонкости нам сейчас лезть не нужно, по этим параметрам мы подбирать ничего не будем, нам просто нужен типичный мотор на пятидюймовый дрон.
Каждая модель мотора имеет 2 - 3 варианта по KV, например IFlight Xing-E размера 2207:

продаётся в вариантах 1800KV, 2450KV и 2750KV, нам нужно знать, лишь то, что KV ниже 2000 не подойдут под 4S батарею, а остальные 2 варианта годятся. Это не значит, что нужно брать максимум. Если кратко, то чем выше KV при тех же оборотах , тем ниже крутящий момент. Но на тягу при одинаковом крутящем моменте влияет пропеллер. Там сложные отношения, а нам нужно оказаться просто внутри коридора параметров, купив типичный мотор.
За подробностями добро пожаловать в телегу ch347, сейчас перегружать информацией не стану.
Дорогие моторы от дешёвых могут отличаться:
1. Лучшим качеством подшипников и материалов.
2. Наличием в комплекте сразу нескольких вариантов длин винтов (длина винта критически важна, это обсудим на этапе сборки)
3. Эффективностью "тяга на ватт" (при оптимальном пропеллере!).
4. Дизайном, лучше обеспечивающим охлаждение.
5. Легче, при той же эффективности или прочности.
Динамика нашего будущего квада зависит не только от моторов (хотя зависит во многом), не меньший вклад внесут итоговая масса дрона и пропеллер.
Дешёвый вариант моторов - это серия Samguk от компании DYS, которая сейчас называется FlashHobby, серия делится на подсерии Shu, Wei и Wu, любые размеры годятся, KV ниже 2000 - нет. Ещё эта серия хороша тем, что производится сто лет и можно докупать мотор по мере ушатывания. Разумно, чтобы не ждать, взять пять и при потере бойца, ставить пятый и сразу докупать. Но это сценарий для отчаянных пилотов, которые нацелены на дестрой.
Из заслуженных, помимо упомянутого Xing-E, это Emax ECO II 2306 и T-motor F40 Pro IV (да любой T-motor), хотя в продаже годных моторов гораздо больше. Не очень хорошими будут старые модели, но как их отличить? Раньше была мода делать моторы для правого и левого вращения (а на дроне два мотора будут отличаться направлением вращения) разными. Пропеллер надевается на вал мотора и притягивается гайкой, и резьбу делали как левую, так и правую и гайки в комплекте шли разные. Сейчас так делать перестали, так вот, разные варианты мотора (CW и CCW) - признак залежалого товара, брать его можно только если это качественный товар с хорошей скидкой, но новичок этого не знает.
Кстати, квад с четырьмя абсолютно разными моторами и четырьмя разными пропами на них будет вполне летать в темпе самой слабой пары "мотор-проп", так как регулировка полёта происходит по фактическому положению квада в пространстве. Можно ещё четыре разных регулятора добавить... звучит как челендж. Пишите в коментах, если хотите, чтобы я всерьёз подумал над постройкой квада у которого все 4 мотора, все 4 регулятора и все 4 пропеллера будут разные. "Франкенштейн" банально, назовём - Арлекин, как фольксваген когда-то (кто не знает, гуглить картинки "polo harlekin").
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.В этом выпуске картинки!
Рама держит все составляющие вместе, даёт жёсткость и защищает электронику от ударов. Обычно рама представляет собой фрезерованные детали из листа карбона, стойки и винты крепления. Для наших целей подойдёт почти любая 5 дюймовая рама не ориентированная на гонки. Размер иногда указывают в миллиметрах - это расстояние по диагонали между центрами моторов (точнее мест под них), нас устраивает размер 210 - 250мм.
Внешний вид типичной фристайл рамы:

Внешний вид типичной гоночной рамы:

То есть нам понадобится чуть больше места в центральной части, чтобы удобно расположить все компоненты. На лучи прикручиваем моторы, на моторы - пропы, внутри впереди камера, в центре стопкой полётный контроллер и регулятор 4-в-1 (либо отдельные регуляторы на лучи), сзади видеопередатчик и антенна чтобы торчала хвостом; и где-то там приёмник с антенной закреплённой согласно религиозной конфессии автора. На крыше аккумулятор, также на крыше спереди будет место под записывающую камеру, если захотим её поставить.
Получится что-то типа этого:

Есть рамы с отдельными 4 лучами, есть с цельной нижней пластиной, нам это неважно. Можно подумать, что раму с отдельными лучами починить (в случае поломки луча) будет проще и дешевле, докупив луч, но нужно ещё найти в продаже этот луч, да ещё и тогда, когда нам это станет нужно, ну или сразу купить запасной.
Можно покупать практически любую раму на али, которая похожа на картинку фристайл-рамы выше, цена таких рам 2 - 5 т.р. они вполне годятся для наших целей. Удачный дизайн рамы от хорошей компании достаточно просто скопировать, чем китайцы и занимаются, попутно экономя на качестве карбона и металла винтов и стоек, но всё равно, самый дешёвый китайский карбон крепче чем квад DJI FPV. Слепить раму по дендрофекальной технологии не выйдет, помимо низкого веса и прочности, нужна жёсткость, так как 4 мотора дают очень серьёзный спектр вибраций и есть риск с резонансом борьбу проиграть (рама либо развалится в воздухе, либо раскрутятся винты).
Если же вы собираете HD вариант, то есть с видеооборудованием DJI, то и рама должна быть подходящая, видеопередатчик достаточно крупный и может не поместиться. Обычно возможность установки DJI-видео указана в описание рамы, на взгляд определить тяжело.
Конечно рам огромное множество и цена может доходить до 100$ и более, но прочувствовать за что такие деньги вы сможете лишь с опытом. Лакшери считаются рамы Armattan, но и у них есть минусы (помимо отсутствующей доставки в Россию и оплаты только PayPal). Среди китайцев хорошими считаются рамы фирм Diatone, IFlight и GepRC. Рама определит максимальный размер курсовой камеры, которую мы сможем поставить - этот момент обсудим вместе с камерами.
Дорогие рамы от дешёвых могут отличаться:
1. Богатым комплектом: несколько комплектов винтов и проставок под полётник и под моторы, защитные пластиковые элементы или детали для удобного размещения наиболее распространённых компонентов типа видеопередатчиков и приёмников TBS, лямка для батареи, мягкая нескользящая прокладочка под батарею (нужная вещь, но есть лайфхак);
2. Более качественным карбоном, снятыми фасками с деталей, "правильной" ориентацией детали на листе карбона.
3. Наличием настроек, типа угла записывающей камеры, или возможности собрать "заниженный" вариант. Также могут быть в продаже сменные лучи для варианта в 6 - 7 дюймов.
4. Большим соотношением прочность к массе.
Всё это, повторюсь, новичку значения не имеет.
Из эконом-класса подойдёт рама из поиска али по фразам "readytosky x220", "frame Martian II" или "frame Martian IV" , из среднего класса Diatone Roma F5, GepRC Mark4 и Mark5 и IFlight XL5.
В следующей серии - моторы!

Такую задачу поставил Little.Bit пикабушникам. И на его призыв откликнулись PILOTMISHA, MorGott и Lei Radna. Поэтому теперь вы знаете, как сделать игру, скрафтить косплей, написать историю и посадить самолет. А если еще не знаете, то смотрите и учитесь.
Один длинный плавный полёт. Таким это место почти никто не видел.
Специально для тех, кто любит FPV-полёты поспокойнее. :)
И немного предыстории.
Здесь раньше проходил знаменитый фестиваль КаZантип. После переходе Крыма в состав России площадка перестала соответствовать требованиям безопасности и проект закрыли. По крайней мере, такую версию я знаю. Теперь здесь Z.City и в сезон проводятся более скромные мероприятия. Зато появились новые инсталляции, но старые по-прежнему находятся здесь.
Видео снимал прошлой зимой в довольно сильный мороз. На следующий день снег растаял...
У кого есть инста, там тоже много интересного)




