

60 км/ч через Тульский Кремль и набережную / FPV квадрокоптер
4 года назад в Туле открылась замечательная набережная, рядом с Кремлем. Пример того, как можно интересно снять городские достопримечательности.
Время приблизительно 5 утра. Съемка с первого дубля, за ранее не продумывал, это был скорее тестовый полет для Gopro10 и использования программной стабилизации видео Gyroflow.
Трек Freedom of Life — Jamix Project
Квадрокоптер iFlight Chimera 7 6s 1300kv Lr
Аппаратура: Radiomaster TX16s +TBS crossfire
Шлем 1: Eachine skyzone Cobra X + антена патч tfp reacc + axll Lumenier.
Батареи: GNB 3300 6s
Камера: Gopro hero 10 + nd фильтр 8. Настройки: protune, нейтральный цвет, выдержка 100, разрешение 5.3к, частота кадров 25.
Показать полностью

FPV фристайл. Учимся летать. Часть 1
Для случайного читателя: это пост из серии, мы с нуля летаем fpv фристайл на квадрокоптере собственной сборки.
Посты о покупке и сборке тут.
Все посты о настройке тут.
По-хорошему, задачу минимум я выполнил: начали с нуля, купили - собрали - настроили, запустили симулятор и обозначили критерий когда можно выходить на улицу. Дальше пилот может сам развиваться как пилот.
Но вспоминая себя, в процессе полётов было много "откровений", которые вам и изложу, теория, так сказать.
Представим, что квад висит: газ полностью компенсирует гравитацию. Мы захотели полететь вперёд. Наклоняем квад, останавливаем наклон (в случае акро), и квад начинает двигаться вперёд, при этом теряя высоту. Газа висения не хватает и на движение вперёд и на поддержание высоты, то есть все манёвры нужно компенсировать газом чтобы оставаться на той же высоте.
Теперь представим, что квад, выровненный по горизонту, падает вниз с очень большой высоты. Допустим пилот при этом хорошо знает уровень газа висения и может быстро и точно его выставлять. Допустим пилот выставил газ висения. Что происходит с квадом? Он достаточно ощутимое время снижает скорость падения и медленно останавливается висеть. То есть для быстрой остановки нам нужно было дать газ выше среднего и опустить до среднего, когда квад остановится. То есть газ выше среднего нужен не только для набора скорости, но и для гашения набранной. Тормоза у нас нет, только газ. И тормозим мы применяя газ в обратную от вектора скорости сторону. Мало того, если мы начали правильно тормозить, то нужно ещё успеть вовремя перестать это делать, иначе начнётся набор скорости в обратном направлении. Плюс всё это происходит по трём измерениям, и становится ясно, почему попытки на панике затормозить часто приводят к смачному крашу.
Следующее откровение, принять его было тяжело: изменения только по йо (yaw, рыскание) не влияют на траекторию квада. Газ и наклон квада остаются неизменными, поэтому траектория не меняется, зато ещё как меняется картинка с камеры. Из-за этого интуитивно управлять квадом не получается: мы быстро понимаем как менять направление куда квад смотрит, но он не летит куда смотрит, и кажется, что не управляется. На что же тогда влияет йо с точки зрения управления? Сейчас, возможно, понять это будет тяжело, но ответ такой: йо влияет на ориентацию остальных двух осей (питч и ролл) относительно направления движения - это важно для управления, но не обязательно прямо сейчас понимать.
Помню, мне поначалу казалось, что от меня требуется какая-то нечеловеческая точность отклонения стиков, доли миллиметра. Отчасти это было правда, так как старые версии Betaflight по умолчанию предлагали уж слишком агрессивную чувствительность (rates). Сейчас ситуация лучше: если вам кажется, что пальцам не хватает точности, то так оно и есть, нужно тренировать и точность в том числе. Сейчас крутить Rates не рекомендую, настроите потом со знанием дела.
А вот что можно попробовать сейчас, так это хват стиков. Их грубо говоря три вида:
1. Большие пальцы сверху стика (thumb grip).

2. Большой палец сзади стика, указательный спереди (pinch grip).

3. Большой палец сверху, указательный спереди (hybrid grip).

Пробуйте самый удобный, необязательно даже одинаковый на обеих руках. Переучиваться будет сложно.
В качестве первого упражнения, я предлагаю полёт по прямой:
1. Дали газ выше среднего, не дожидаясь набора нужной высоты прикрыли до среднего.
2. Наклонили вперёд, чуть добавив газа, остановили наклон.
3. Летим вперёд до конца карты, стараясь понимать и держать свою высоту и скорость.
4. За пределами карты нас либо сбросят в начало либо сами жмём ресет.
5. Повторяем, чем быстрее и ниже, тем лучше.
Отдельно отмечу взлёт. Отрываться желательно интенсивно, слишком плавный набор газа приводит к тому, что квад начинает "волочиться" по земле, а полётник пытается компенсировать наклон и обычно это заканчивается переворотом.
Если вы смогли сильно увеличить скорость во время этого упражнения, то станет очевидным ещё одно "откровение": комфортная скорость прямолинейного полёта напрямую зависит от угла наклона камеры. В Liftoff угол регулируется стрелками вверх-вниз. Запомните угол, который в симе по умолчанию и уменьшите его до 15-20 градусов для начала (градусы покажут при нажатии стрелки вверх или вниз). С ростом скорости постепенно вернёте до стандартного, но не превышайте его, нам ещё поворачивать учиться, и угол к тому времени лучше для себя "зафиксировать".
По хорошему, вся критичная информация для начала полётов мною написана. Про базовое управление допишу, есть пара тем, на которые я обещал пост, их тоже напишу. А дальше, скорей всего, частота постов снизится, но всё равно их тема будет учитывать только то, что я тут написал ранее, то есть, грубо говоря, продолжу вести условного читателя, который стартанул с моих постов.
Ну и в каждом посте уникальная фича ответов на индивидуальные вопросы в телеге.
Не стесняйтесь писать, потому что самые "тупые" вопросы обычно закрывают самые обширные области непонимания и дают хороший импульс дальнейшего изучения.
Показать полностью
3

FPV Фристайл. Настройка дрона. Часть 6. OSD. Первый виртуальный полёт
Заканчиваем настройку FPV фристайл дрона.
Покупку и сборку смотрите в предыдущих сериях.
Настройка:
1. Часть 1
2. Часть 2. Прошивка ExpressLRS
5. Часть 5. ВидеопередатчикНа странице OSD настраиваются элементы текстовой информации. В поле Elements перечислены все доступные элементы. Причём каждый можно включить или выключить для трёх профилей. Мы пока настраивать переключение профилей не будем, настроим только один.
Насколько я помню, по умолчанию включен только элемент Warnings - и это не спроста. Все причины, по которым квад не армится будут отображаться на экране, а также другие проблемы: потеря связи, низкий заряд и прочее. В средней области показан пример экрана, но я рекомендую настраивать информацию, глядя в реальные очки, часто границы реального экрана не совпадают с нарисованным в интерфейсе и приходится сдвигать элемент, чтобы его стало видно. В очках изменения видны сразу. В среднем окне можно и нужно перетаскивать элемент в нужную часть экрана. Причём, включаем элемент, утаскиваем в нужный угол, включаем следующий. Иначе они наслаиваются друг на друга и тяжело понять какой элемент мы тащим.
Помимо Warnings вторым обязательным элементом будет напряжение батареи (Battery voltage) или среднее напряжение ячейки (Battery average cell voltage). Если у нас несколько квадов на 4S и 6S, то удобно видеть напряжение ячейки, чтобы сажать любой квад помня лишь одно значение. Всё остальное по большому счёту необязательно, даже уровень сигнала управления (RSSI Value или Link Quality), потому что в нашем случае мы обязаны получить дальность радиоканала управления выше, чем дальность видеоканала. Для диагностики проблем, само собой, полезны будут и эти и другие поля.
Из полезных настроек можно включить отображать режим (Fly Mode), удобно взлетать и садиться в Angle режиме. "Craft name" покажет имя нашего квада, так мы понимаем, что видим картинку со своего квада, а не с чужого. "Flip after crash arrow" покажет в какую сторону отклонять стик, чтобы перевернуться в режиме черепахи, картинка "вверх ногами" иногда дезориентирует, ставить можно по центру экрана, появляется стрелка только в режиме черепахи.
Battery Usage с вариантом Graphical remaining вместе с установленным значением Capacity на странице Power & Battery покажет убывающий прогресс бар батареи. Удобно планировать полёт и судить о состоянии батареи: на уставшей батарее предупреждение "LOW VOLTAGE" покажет гораздо раньше (относительно оставшейся ёмкости).
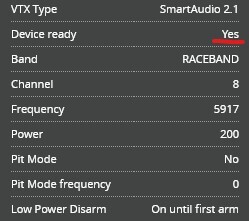
Поле VTX Channel покажет диапазон, канал и мощность на которой вещает видеопередатчик.
Поначалу забавно поиграться с авиагоризонтом и прицелом (Artifical horizon, Artifical horizon sidebars и Crosshairs), но потом начинаешь ценить каждый пиксель картинки и как минимум убираешь это всё в отдельный профиль для зрителей. Выставлять квад быстро и точно в горизонт будет основной проблемой, но OSD элемент имеет такую задержку, что для этой задачи бесполезен.
В области Warnings настраивается отображение предупреждений - оставим по умолчанию. В области Post Flight Statistics - настройка списка параметров после полёта (читай дизарма). Там можно настроить по желанию - не критично.
Кнопка Font Manager позволяет выбрать шрифт из нескольких вариантов. Только перед сменой шрифта не забудьте нажать Save для сделанных настроек OSD.
Получается, что всё готово для первого полёта, однако главным фактором успешного первого вылета будет готовность пилота.
Если следовать гайду, то этап обучения в симуляторе мы не прошли. И если вы не летали в симе, но полностью собрали и настроили квад, то вам стоит взять себя в руки и всё-таки заставить себя запустить сим, тогда вам станет ясно, что может произойти на улице в первый полёт.
Симулятор буду рассматривать LiftOff, но другие тоже подойдут (Drone Racing League, Velocidrone). В симе, помимо настроек стиков стоит настроить Reset квада на тумблер арма и смену режима Acro\Angle так же как настроили в полётнике. Есть смысл начинать полёты с мыслями о реальном кваде, то есть:
- сразу отмечать где стоит пилот, и летать сначала недалеко от "себя"
- в случае потери контроля\дезориентации стараться делать дизарм (ресет) до столкновения с препятствием или землёй; напомню, что на аппу мы посмотреть не сможем, тумблер дизарма мы по памяти должны переключить в нужное положение
- не стараться исправить ситуацию газом, особенно, когда стало ясно, что квад летит не туда, куда направлена камера; принимаем участь - дизарм
- взлетать в Angle режиме, снова по памяти щёлкаем уже другой тумблер
- поначалу мозгу требуется много усилий для поддержания квада в воздухе, и если пилот устал, то сажать квад в Angle и рядом с "собой"
- ходить по квартире 2 минуты, если упали далеко от себя
- включить симуляцию батареи и следить за напряжением, сажать при разряде
- включить симуляцию помех
Все эти факторы, если о них не думать заранее, станут полной неожиданностью на улице.
На большой высоте комфортнее летать - нет препятствий, но слишком просто потерять своё местоположение и начать улетать с риском потери видео, низко летать опасно, как для квада, так и для препятствий (людей быть рядом не должно вообще).
Для первого виртуального полёта пойдёт первая локация Straw Bale режим Free flight. Летать там можно пробовать вдоль забора по квадрату: пролетели по прямой, повернули, дальше по прямой и так далее. Начать можно высоко, потом высоту снижать. Не забываем после взлёта включать Acro. Регулярно менять направление по часовой\против.
Критерием готового к улице пилота я бы назвал пилота способного надёжно завершать гонку (то есть пролетать 3 круга без проблем каждый раз) на локации Autumn Fields, карта Stick Time. Это простая плоская карта с огромными воротами. И, кстати, летать гонки - очень хорошая тренировка. Нам в первую очередь нужно лететь туда, куда мы хотим (да, с этим будут проблемы поначалу) и гонка нам как раз даёт это. В свободном режиме мы можем сделать вид, что нам туда и нужно было, поэтому точки через которые нужно пролететь должны быть заданы извне.
Другой крайностью будет попытка освоить закрытую локацию, типа подземной парковки (Minus One в Liftoff) до начала реальных полётов. Летать там тяжело, я бы сказал, это как заново учиться, поэтому тратить время там сначала не нужно, а тренироваться в реале и потихоньку пробовать парковку, когда открытые карты наскучат.
Как обычно, призываю не стесняться, и по всем вопросам относительно FPV обращаться ко мне в телегу.
В следующей серии упражнения и откровения.
Показать полностью
FPV фристайл. Настройка дрона. Часть 5. Видеопередатчик
Продолжаем настройку FPV фристайл дрона.
Покупку и сборку смотрите в предыдущих сериях.
Настройка:
1. Часть 1
2. Часть 2. Прошивка ExpressLRS
На борту у нас к этому моменту должен быть запаянный видеопередатчик и настроенный порт UART для общения с ним в прошивке. Это мы сделали в первой части.
Видеопередатчик умеет вещать на разных частотах и разных уровнях мощности. И мы эти способности будем активно использовать, а значит должны иметь к ним удобный доступ.
1. Зачем переключать мощность, можно же всегда использовать максимум?
На гонках обычно мощность ограничена регламентом в 25мВт. Дело в том, что чем больше мощность, тем сильнее передача "расползается" по частоте к соседним и может давать помехи пилоту, который вроде бы принимает на другой частоте. В групповых полетушках обычно ограничиваемся мощностью в 200-400мВт, в одиночных залётах, конечно, использую доступный максимум.
2. Зачем переключать частоту, можно же один раз настроить приёмник и не париться?
Опять же, при полётах в группе важно распределить частоты по пилотам, чтобы они были максимально далеко и не повторялись. Если вы не знаете, как переключить канал, то в первый же групповой полёт, вы будете тем человеком, под которого придётся всем подстроиться (то есть уйти с вашего канала, который вы не знаете как сменить). Это неприлично.
Теперь научимся управлять параметрами видеопередатчика (VTX).
В каждом VTX зашита таблица частот, поделённая на диапазоны и каналы. Диапазонов обычно 5-6, каналов в диапазоне всегда 8.
У диапазонов есть свои названия, но нет стандартов, поэтому называться они могут по-разному. Мало того, диапазоны кроме RACEBAND практически не используются, но знать нам о них нужно для правильной настройки. RACEBAND отличается тем, что имеет частоты равномерно распределённые по всему легальному (в том числе в России) диапазону частот с максимальным отдалением каналов друг от друга. Поэтому если на полетушках вам говорят использовать второй канал - это RACEBAND 2.
Для возможности настройки нам нужно сообщить полётнику:
1. UART порт, на котором подключён VTX, (сделано в первой части)
2. Протокол общения, Tramp или SmartAudio (так же сделано).
3. Таблицу каналов и мощностей.
Для последнего пункта и нужна страница Video Transmitter в Betaflight Configurator.
Обычно верная таблица есть на сайте производителя, но её публикуют в двух вариантах:
1. В виде файла JSON, тогда его можно загрузить на странице Video Transmitter с помощью кнопки Load from file
2. В виде набора команд, которые нужно ввести вручную (копипаст) в командной строке (страница CLI в конфигураторе).
Если вы нашли и успешно применили один из способов, нас могут ждать две тонкости.
1. Дело в том, что в Штатах и Европе некоторые диапазоны частот и уровни мощности либо запрещены либо разрешены только с лицензией радиолюбителя. Поэтому таблицы публикуются "максимально легальные" - некоторые каналы и мощность выше 25мВт будут недоступны.
Помимо этого, по тем же причинам, сам VTX может идти с завода в заблокированном режиме, но процедура разблокировки обычно публикуется на оф. сайте.
2. По идее, можно настроить лишь RACEBAND диапазон, ведь остальные диапазоны не используются, но я лично столкнулся с тем, что VTX некорректно выставлял частоты, пока я не вбил всю официальную таблицу частот. Поэтому с этими таблицами практически всегда нужно возиться вручную, хотя отличаются они друг от друга незначительно и можно сделать шаблон, который редактировать под конкретный VTX.
Хорошая новость заключается в том, что в Betaflight есть система Presets. Это фактически подборка наборов команд (а любую настройку в интерфейсе можно повторить просто вбивая команды в CLI), которые можно быстро применить к вашему кваду. С помощью пресетов удобно делиться кусками конфигурации или сохранять любимые настройки в отдельное место. Плохая новость - для собственного хранилища пресетов нужно создать свой репозиторий на GitLab и пушить изменения через GitLab Desktop или командную строку как настоящий программер. Снова хорошая новость - я этот путь прошёл, создал свой репо, и теоретически могу составлять конфиги для помощи кому-то, чтобы этот кто-то применял настройку в один клик (предварительно настроив Betaflight Presets на мой репо). Было бы интересно попробовать.
Итог всей этой истории.
1. Если вы нашли файл с VTX Tables для вашего передатчика, убедитесь, что там прописаны все мощности. Для JSON это выглядит как-то так:
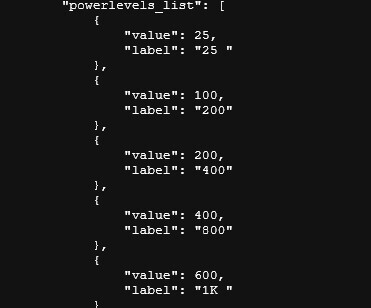
Для команд CLI примерно так:

То есть перечислены несколько уровней мощности.
2. Если какие-то диапазоны содержат нули, убедитесь, что нулей нет в диапазоне RACEBAND (он весь легален). На другие диапазоны плевать.
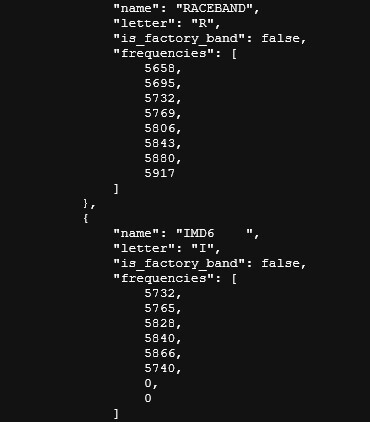
Если вы файл не нашли, есть шанс его составить самостоятельно, надо только у производителя узнать содержимое таблицы и протокол общения с полётником. Но это тема для индивидуального разбора в телеге.
Результатом правильной настройки должен быть статус Device ready - Yes на странице Video Transmitter (при подключённой батарее, так как передатчик не питается от USB).
И, главное - возможность переключения каналов и мощностей в OSD меню Betaflight, вход в который почему-то известен всем, но мало где описан.
Передатчик настраиваем на конкретный канал в Betaflight Configurator, очки настраиваем на него же через органы управления, согласно инструкции и видим картинку с камеры.
Дальше левый стик влево, газ по центру, правый стик вверх.

Заходим в Features, там в VTX меняем значение Chan, сохраняем. Должно пропасть видео, и в очках, переключившись на новый канал, видео должно восстановиться.
Теперь вы готовы к полётам в компании.
В следующей серии настроим информацию на экране.
Показать полностью
5
FPV Фристайл. Настройка дрона. Часть 4. Режимы
Продолжаем настройку FPV фристайл дрона.
Покупку и сборку смотрите в предыдущих сериях.
Настройка:
1. Часть 1
2. Часть 2. Прошивка ExpressLRS.
Продолжаем настройку и она имеет смысл только если у нас при подключении к Betaflight Configurator на странице Receiver двигаются индикаторы каналов когда мы щелкаем тумблерами и жмём кнопки. Мы этого добились в прошлом посте.
Режимов в Betaflight много и глядя в интерфейс никак нельзя понять, какие режимы исключают друг друга, а какие будут работать вместе. Например, можно независимо пищать динамиком и включить светодиодную ленту, но нельзя пищать моторами, пока они крутятся. Прошивка сделана так, что ничего страшного не произойдёт, если одновременно включить взаимоисключающие режимы, но интерфейс всё равно позволяет их так настроить, что немного сбивает с толку.
В Betaflight настройка режима выглядит так:

В данном случае мы настраиваем ARM (арминг, "взведение", включение дрона). Режим в котором дрон начинает откликаться моторами на газ и остальные стики - активный режим полёта.
Чтобы появилась жёлтая полоса жмём Add Range (на скрине уже сделано).
Теперь дёргаем тумблер, на который хотим повесить данную функцию (обычно двухпозиционный) и поле AUTO меняется на AUX<N>, где N номер нашего доп. канала. Нумерация идёт с единицы для первого доп. канала после четырёх основных, то есть AUX1 для пятого канала (согласен, удобно). Важно: для ExpressLRS необходимо ARM настроить именно на AUX1, при этом арм должен быть высоким значением, а дизарм - низким, на это рассчитывает внутренняя логика протокола. По-хорошему, об этом надо было упомянуть в предыдущем посте, чтобы настроить удобный для арма тумблер на CH5 (он же AUX1), но я протупил.
Дальше жёлтой засечкой под шкалой обозначено текущее положение канала (в моём случае это середина - 1500, так как аппаратура не включена). Наша задача состоит в том, чтобы жёлтой областью указать диапазон значений, в которых данный режим активен.
Армить квад кому-то удобно тумблером на себя, кому-то - от себя. Точнее нужно подумать как удобнее дизармить квад в случае выхода из под контроля. Это зависит от конкретной аппаратуры и предпочтений пилота.
В данном случае квад армится тумлером на себя (значение 2000) а дизармится в положение по-умолчанию - от себя (значение 1000). Теперь ясно, почему важно включать аппаратуру со всеми тумблерами в положении по-умолчанию. Можно и нужно настроить аппу, чтобы она перед включением заставляла переключить все тумблеры в дефолт (об этом наверное будет отдельный пост). Газ внизу при включении она требует по-умолчанию.
Теперь пробегусь по другим режимам, которые нам будут нужны:
1. ANGLE - режим стабилизированного полёта, как я уже писал, его по началу удобно использовать для взлёта и посадки без очков.
2. BEEPER - режим пищания, моторами и\или динамиком, мы это настраивали.
3. PREARM - режим, при котором разрешён арм. Удобная вещь, чтобы армить квад не одним тумблером, которые можно задеть случайно, а двумя. Первый у меня работает как кнопка, то есть однопозиционный, а вторым квад армится, только при нажатом первом.
4. FLIP OVER AFTER CRASH - режим "черепахи". Когда упали пузом вверх в этом режиме моторы крутятся в противоположную сторону и позволяют перевернуть квад "на ноги". Работает через дизарм: то есть летаем, упали пузов вверх, тумблером дизарм, другим тумблером вкл. черепаха, арм, стиком покрутили пропами, чтобы перевернуться, снова дизарм, тумблером выкл. черепахи, арм и полетели. Этот режим не будет доступен, если протокол моторов выставлен отличный от семейства DSHOT (об этом далее).
5. А наш ACRO режим, ради которого всё мы это делаем будет активен, когда ни один из других не активирован. Точнее это будет режим AIRMODE, который мы включили по-умолчанию раньше.
Этого будет достаточно для первых полётов. Возможностей прошивки гораздо больше: можно задавать несколько каналов на один режим и выставлять логические отношения между ними. Можно в аппе сделать так, чтобы все тумблеры дёргали один единственный канал, но на разные значения (а не 1000 и 2000), и тем самым использовать для всех режимов только один канал. Очень широкие возможности, мы должны о них помнить, но сейчас не заморачиваться.
Также на странице Adjusments у меня на один 3-х позиционник настроена смена трёх профилей рэйтов (Rates - настройки чувствительности), а на другой смена трёх профилей OSD (экранная информация). Это удобно, но опять же, заморачиваться сейчас нет смысла.
Вкладка Servos управляет сервомашинками, которых у нас в кваде нет.
Вкладка Motors настраивает моторы. Первым делом выставляем протокол на DSHOT600 и нажимаем Save and Reboot.

Теперь нам нужно настроить два критичных для полёта момента: порядок моторов и схема вращения.

При этом сам летательный аппарат уже настроен как QUAD X, что означает X-образный квадрокоптер. Достаточно интересно полистать какие ещё извращения умеют летать, главное вернуть QUAD X в это поле.
Переключатель Motor direction is reversed меняет направление вращения всех моторов на противоположное. Точнее - говорит контроллеру, что у нас именно так настроены моторы. Большой разницы нет, но я люблю эту опцию включить. С ней, например, при посадке\падении в траву на камеру не накидывает пропеллерами эту покошенную траву (накидывает в бока рамы на контроллер, но камера чистая). Обязательно запомните, что в итоге вы выбрали - вращение внутрь камеры или наружу от камеры. Когда будем ставить пропеллеры - это будет важно.
А далее у нас идут те самые два момента, которые в версии 4.3 сильно облегчили настройку. Это кнопки Reorder motors и Motor direction.
Диалог Reorder motors покажет контроллеру где физически на раме установлен мотор, который он считает первым, вторым и так далее. Если вы установили регулятор как рекомендуется, и шлейф собран правильно, то все моторы занимают правильные места, но нам необходимо в этом убедиться. Даже не думаем прикручивать пропеллеры и подключаем батарею. Должны прозвучать три коротких и два длинных тона от моторов. С подключённой батареей: во-первых обязательна присоединённая антенна к видеопередатчику, во-вторых он всё равно может сильно греться и в-третьих батарея не должна быть разряжена, достаточно из режима хранения или полностью заряженная.
Взводим переключатель I understand the risks и чуть приподнимаем ползунок вверх у мотора номер один. Должен вращаться мотор согласно схеме в разделе Mixers, то есть задний правый. Проверяем остальные моторы. Если что-то не совпало, жмём Reorder Motors, там всё понятно, крутится мотор, жмём на схеме какой именно. Потом нажимаем Save and Reboot.

Дальше мы настраиваем направление вращения. Вероятность, что по-умолчанию всё настроено верно - почти нулевая! Регулятор с завода настроен крутить все моторы в одну сторону. Поэтому сразу жмём Motor direction соглашаемся на риск, выбираем Wizard. Берём бумажку в руки и прислоняем перпендикулярно к вращающемуся мотору, по отклонению бумажки видно куда мотор вращается. Жмём на номер того мотора, который вращается неверно. Обычно это моторы 1 и 4 или 2 и 3, но не верьте мне на слово, спаять можно как угодно.
Проверьте и порядок и направление вращения дважды, без этого ничего никуда не полетит.
Можно улучшить поведение квада в воздухе включив RPM Filtering (фильтрация на основе оборотов моторов) но для этой фичи нужно включить Bidirectional DSHOT (двунаправленный протокол управления моторами), а он, в свою очередь, может не поддерживаться текущей версией прошивки регулятора, но точно поддерживается последней, то есть нужно перешивать регуляторы. А как это сделать, расскажу на своём канале в личной телеге. Либо, после освещения всех необходимых этапов, дождитесь об этом отдельный пост.
В следующей серии будем настраивать видеопередатчик.
Показать полностью
4

Сможете найти на картинке цифру среди букв?
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi