

Мыльные пузыри
Фестиваль мыльных пузырей прошел в Хабаровске на прошлых выходных. Все желающие абсолютно бесплатно могли попробовать свои силы в этом непростом занятии. Я как оператор ФПВ дрона не смог пропустить это мероприятие.
Фестиваль мыльных пузырей прошел в Хабаровске на прошлых выходных. Все желающие абсолютно бесплатно могли попробовать свои силы в этом непростом занятии. Я как оператор ФПВ дрона не смог пропустить это мероприятие.
Продолжаем настройку FPV фристайл дрона.
Покупку и сборку смотрите в предыдущих сериях.
Настройка:
1. Часть 1
2. Часть 2. Прошивка ExpressLRS.Аппаратура может передавать, грубо говоря, несколько чисел. Каждое число может быть от 1000 до 2000 и их максимальное количество в одной "передаче" может быть равно количеству каналов или меньше. И таких передач происходит несколько десятков раз в секунду (а то и сотен). Аппаратура приходит с завода с настроенными 4 каналами (два стика по две оси каждый), то есть шлёт четыре числа за раз, но может слать больше. Нам нужно настроить эти каналы как минимум для удобства, как максимум - мы заплатили за них. Настраивается это на аппаратуре, я буду приводить пример из Radiomaster Zorro, на BetaFPV LiteRadio 3 Pro будет точно так же, а на Radiomaster TX16S будут всё те же меню и пункты, но в красивом интерфейсе, так как есть цветной тачскрин. В телеге всё покажу, если надо будет.
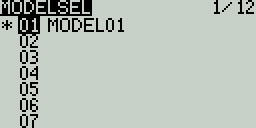
Итак клавишей MODEL (MDL) попадаем в меню модели:
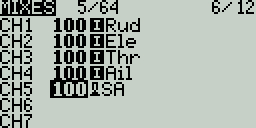
клавишей PAGE листаем до меню MIXES
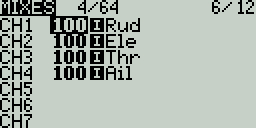
Видим наши настроенные 4 канала.
Листаем крутилкой до свободного канала (CH5), нажимаем на крутилку

Крутим на шаг вниз на пункт Sources, нажимаем крутилку
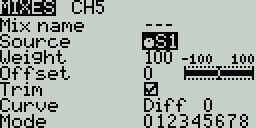
Маркер начинает мигать, в этот момент можно нажать кнопку или дёрнуть тумблер, который мы хотим сопоставить с этим каналом.
Я жму кнопку слева от экрана, S1 меняется на SA (рядом с кнопкой есть буква A).
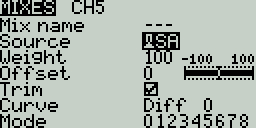
Жмём 3 раза RETURN (RTN) и видим, что пятый канал настроен на кнопку A.
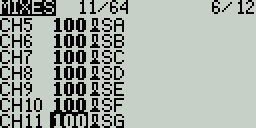
Теперь нам нужно это повторить для каждой кнопки, тумблера и крутилок наверху аппы.
Сейчас мы настроили каналы для одной "модели". Раньше все нужные вычисления производила аппаратура и на модель (радиоуправляемую) слала только готовые значения каналов. Если нужно было настроить другую модель, то для неё создавалась отдельная "модель" на аппе (помните меню MODELSEL). Квад же все вычисления производит на борту и поэтому наши модели квадов не будут сильно отличаться, и новую "модель" есть смысл создавать, только под другой приёмник, у которого другой протокол или количество каналов. К чему я это? Мы сейчас создаём "модель" которой сможем пользоваться на нескольких квадах, поэтому настроить её нужно по полной.
Теперь, помимо стиков, аппаратура будет посылать состояние всех настроенных тумблеров, крутилок и кнопок. Для двухпозиционного тумблера это всего два состояния: значение 1000 и 2000 (кажется расточительным использовать канал в 1000 значений всего на два состояния, но в нашем случаем, это нормально). Настраивать каналов больше, чем органов управления не имеет смысла. Теперь в Betaflight Configurator на странице Receiver должны двигаться индикаторы остальных каналов, при дёргании соответствующих органов управления.
По идее, больше нам лезть в этот не самый удобный интерфейс аппаратуры не придётся, в крайнем случае, мы скопируем эту модель, дадим новое имя и привяжем к новому кваду.
Если же вам, по какой-то причине, нужно настраивать десятки моделей, использовать шаблоны или настраивать несколько аппаратур, то вам в помощь EdgeTX Companion, но скорей всего, вы это знаете и без меня.
В следующей серии мы будем назначать функции на эти кнопки, тумблеры и крутилки.
Продолжаем настройку FPV фристайл дрона.
Покупку и сборку смотрите в предыдущих сериях.
Настройка:
1. Часть 1
Для того, чтобы ваш приёмник слушался именно вашу аппаратуру, а не какую-то другую нужно провести процедуру привязки (bind). Аналог pairing для bluetooth.
Для ExpressLRS это можно сделать несколькими способами, подробно опишу два:
1. Перевести приёмник и передатчик в режим привязки и они привяжутся.
Этот способ хорош в полях, когда нужно срочно привязать чужой квад к своей аппе (или наоборот) по какой-то причине.
2. Вшить в приёмник и передатчик одну и ту же "binding phrase" (пароль привязки) и они будут привязываться автоматически.
Этот способ хорош тем, что перепрошив один раз передатчик, когда мы обновляем прошивку на новом приёмнике - сразу получаем его привязку. Плюс, сможем указать реквизиты домашней wifi сети и перепрошивать в дальнейшем приёмник и передатчик по wifi практически в один клик (это третий способ прошивки, но для его использования сначала нужно вшить реквизиты wifi каким-то другим способом).
Подробнее об этих способах:
1. Чтобы перевести передатчик в режим bind, нам нужно установить (фактически скопировать) скрипт на языке LUA в память аппаратуры (SD-карта). Взять его можно с официальной страницы (прям на эту ссылку правым кликом и "Сохранить как"). И скопировать на SD карту в папку scripts/tools. Можно подключить аппаратуру по USB к компу в режиме кардридера. Скрипт может уже быть, тогда его обновляем. На аппаратуре жмём SYS, выбираем ExpressLRS и там жмём bind. Передатчик в режиме привязки.
Приёмник же нужно выключить-включить три раза, и он перейдёт в режим bind. На передатчике появится сообщение об удачной привязке.
2. Второй способ требует обновления прошивок как приёмника, так и передатчика. На самом деле ExpressLRS сейчас бурно развивается и в новых версиях действительно появляются новые и полезные функции, поэтому рано или поздно придётся научиться перешивать всё это добро. Перешивать передатчик будем по кабелю.
Скачиваем с официального сайта ExpressLRS Configurator и запускаем. Втыкаем аппаратуру в USB и на этот раз выбираем Debug.
В интерфейсе конфигуратора выбираем свежий релиз и наше оборудование, с моём примере -Radiomaster Zorro. Метод EdgeTXPassthrough. Замечу, что если ваша аппаратура работает на OpenTX, метод не сработает, нужно либо прошить её на EdgeTX, либо перешивать другим способом, например по wifi.
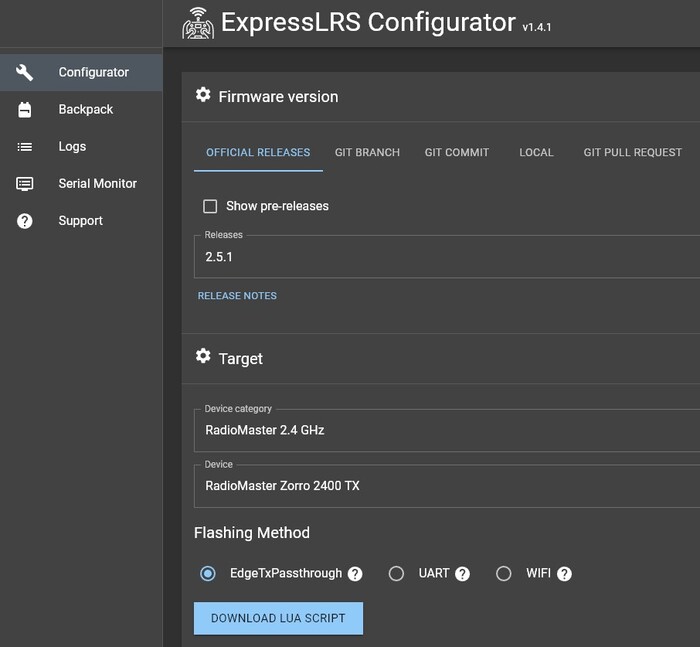
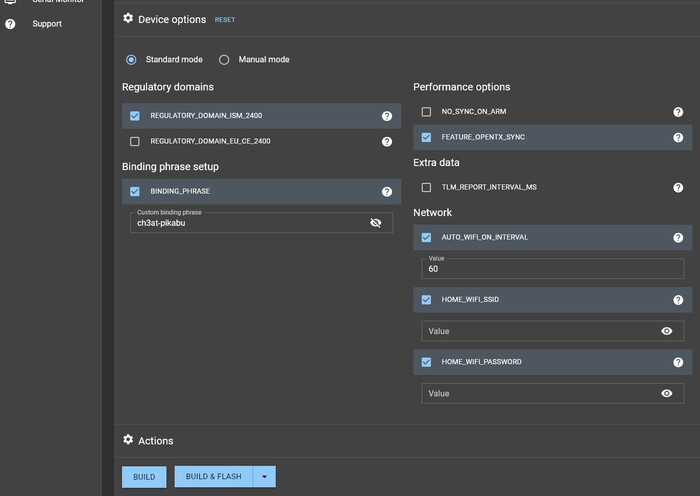
Дальше среди опций Regulatory Domain выставляем ...ISM_2400 - это ограничения на частоты и мощность. Для региона EU ограничения строже.
Binding_phrase - это то, ради чего мы всё затеяли, фраза для привязки.
Отсюда же качается LUA Script, его тоже устанавливаем. Также можно прописать реквизиты вашей wifi сети, тогда следующая прошивка пройдёт проще - без подключения кабеля.
И можно жать Build and Flash. Первый запуск может занять время - скачиваются зависимости и компилируется прошивка.
Теперь прошьём приёмник и тут в моём стройном изложении закралась тонкость. Когда мы паяли приёмник к полётнику, я написал, что нужно припаять минимум три провода: земля, питание и соединение TX приёмника с RX полётника. И это правда, но для прошивки приёмника нам нужен полный UART интерфейс и для этого нужно подключить четвёртый провод: RX на приёмнике нужно соединить с TX полётника того же UART.
Прошивка проходит аналогично, только теперь мы подключаем по USB полётник с припаянным и настроенным приёмником. Выбираем оборудование, для приёмников Happymodel EP1, EP2 и EP3 это опции Happymodel 2.4 GHz и HappyModel EP 2400 RX
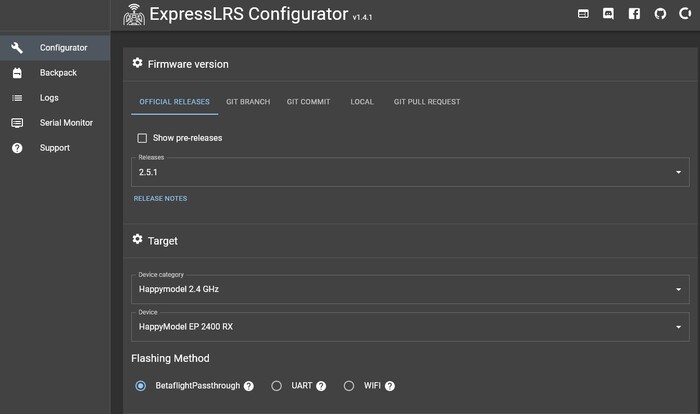
Метод - Betaflight Passthrough.
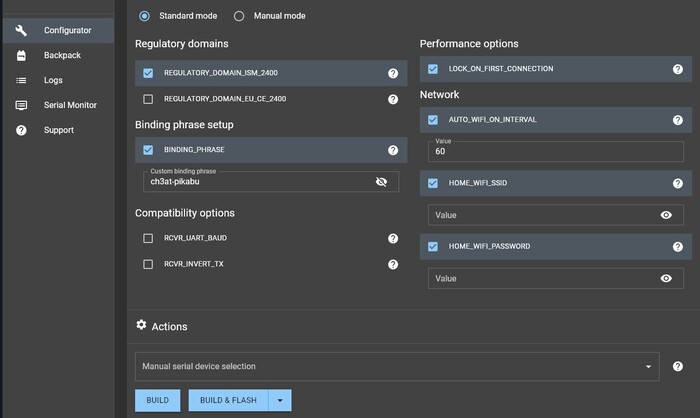
Вбиваем ту же Binding Phrase и можем настроить домашний wifi. Жмём Build and Flash и по идее теперь приёмник должен автоматически привязаться к нашему передатчику. Проверить это просто. Подключаем полётник по USB, запускаем Betaflight Configurator, переходим на страницу Receiver и дёргаем стики на аппаратуре - первые четыре канала должны откликаться на стики.
Если всё работает, можно сказать, что полдела сделано.
Четвёртый способ перепрошить как приёмник так и передатчик - это по wifi но без реквизитов домашней сети, тут я описывать этот способ не буду, но готов консультировать, как обычно, в телеге ch347 (CHEAT:)
В следующей серии мы заставим работать все кнопки, тумблеры и крутилки на аппаратуре.
В предыдущей серии мы покупали компоненты дрона.
В этом посте ссылки на весь гайд по покупке, а так же гайд по сборке.
Сегодня настраиваем дрон так, чтобы он полетел.
Нет никакого смысла шить версию старше, тем более, что 4.3 настолько крута, что её предлагали назвать 5.0. Для новичка там, как минимум, убрано два геморройных момента в настройке квада с нуля.
Подключаем полётник по USB к компьютеру и запускаем Betaflight Configurator. Софт увидит COM-порт полётника. Если не увидел - на странице Options взводим переключатель Show all serial devices и перезапускаем BF Configurator. Напоминаю, что батарею подключать не нужно, а пропеллеры вообще лучше держать в соседней комнате. Ставить мы их будем в самый последний момент.
Подключать батарею к не настроенному/не проверенному кваду с пропеллерами опасно!
Сразу жмём Update Firmware, рядом c полем Choose a board жмём кнопку Auto detect, на всякий случай запоминаем что определилось в том поле, внизу жмём Load Firmware [Online], после чего Flash Firmware. После прошивки нажимаем Connect, если автоматом не подключилось.
При первом включении программа выдаст предупреждения, что во-первых нужно применить параметры по-умолчанию для вашей модели полётника. А во-вторых, нужно откалибровать акселерометр и выбрать протокол управления моторам.
С первым просто соглашаемся (кнопка Apply Custom Defaults). Акселерометр калибруется так: кладём контроллер (или квад) на плоскую горизонтальную поверхность и нажимаем кнопку "Calibrate Accelerometer" на странице Setup. Точность нам не важна, акселерометр нужен только в стаб режиме и квад всё равно не будет висеть ровно, его будет вести от ветра. Стаб-режим по началу можно использовать для взлёта и посадки - коротко и в движении.
Протокол моторов отключён по-умолчанию, как своеобразная защита от дурака и отказ от ответственности - чтобы что-то испортить, ты должен сам куда-то влезть и включить.
Сначала, наконец, разберёмся с режимами в которых можно летать. Эти режимы отличаются тем, что мы контролируем с помощью джойстиков (или просто стиков) на аппаратуре.
Глобально режима два: стабилизированный (стаб) и акро (акробатический?).
В стабе стиком по осям питч (тангаж) и ролл (крен) мы контролируем угол наклона квада. Отпустили стик, он вернулся в центр, углы наклоны стали по нулям, квад параллелен земле. По газу в этот момент, очевидно, ситуация может быть разная, от набора высоты до падения.
Отклоняем стик вперёд, квад наклоняется вперёд. Перестаём отклонять - квад перестаёт наклоняться. Упёрли стик в максимум, квад отклонился на максимально настроенный угол и преодолеть его в этом режиме квад не сможет. Если кажется, что для дебилов объясняю - хорошо. Дальше будет сложнее. Этот режим в Betaflight называется Angle.
В акро режиме стиком мы контролируем скорость вращения по заданной оси. То есть, сдвинули стик - вращение началось, вернули в центр вращение прекратилось, а угол наклона остался. Чтобы убрать угол, и выставить опять горизонт, нам нужно начать вращение в противоположную сторону отклонением стика и прекратить в нужный момент его возвратом в центр. Углом отклонения стика регулируется скорость вращения. Если подумать, как управляется самолёт своими отклоняющимися плоскостями на крыле и хвосте, которые напрямую заведены тягами на ручку управления (не силён в терминологии), то, возможно, станет понятнее. Этот режим в Betaflight называется Acro. Но это слово вы в интерфейсе Betaflight Configurator не увидите, потому что этот режим работает тогда, когда не выбран ни один из других.
Помимо названных режимов есть и другие, они - варианты глобальных и о них позже.
Сначала я пробегусь по настройкам, которые необходимо сделать, чтобы квад полетел и было удобно с ним обращаться.
На странице Ports мы обязательно указываем на каком UART у нас приёмник, для этого напротив него включаем SerialRX. И включаем Peripherals для порта на котором у нас видеопередатчик, в зависимости от поддерживаемого протокола это опция VTX (IRC Tramp) или VTX (SmartAudio). На каждой странице, после настройки не забываем нажимать Save или Save and Reboot. Страница Ports известна тем, что может не сохранить изменения с первого раза, поэтому проверяем дважды.

Вообще, настройки в Betaflight объединены по функциям, а не по приоритетам, поэтому рядом могут быть две настройки ничем друг от друга не отличающиеся визуально, но одна критически важна для полёта, а эффект от второй нужно долго и внимательно искать в поведении квада. Поэтому у начинающего будет масса вопросов, как обычно, я призываю читателя задавать их, например, мне в телеге.
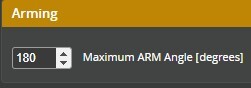
Дальше страница Configuration. Тут критический параметр - Maximum ARM Angle. Настраивает максимальный угол на который квад может быть отклонен, больше которого запрещён арм (то есть включение моторов). Если проще, то криво стоящий квад нельзя включить. Но нам, фристайлерам, это очень не подходит, потому что в ситуации, когда квад повис на дереве, очень помогает покрутить пропеллерами, чтобы квад освободить. Так что ставим этот параметр в 180 градусов.
Вписываем название нашего квада или свой ник в поле Craft Name. Позже мы настроим отображение этого имени на экране и так мы будем знать, что в очках видим свою картинку, а не чужую.
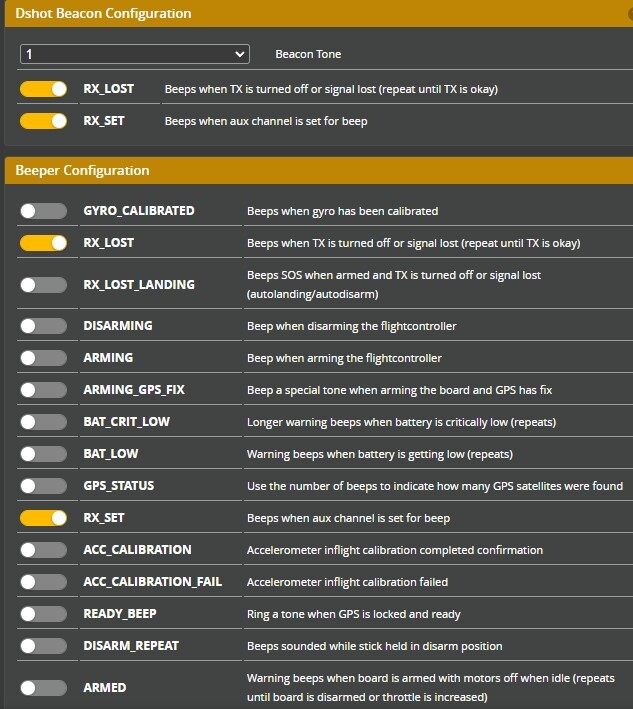
И настройка пищания. Квад может пищать моторами и отдельным динамиком, если мы его запаяли (в моём гайде - нет). Dshot Beacon Configuration (писк моторами) - включаем обе опции, в Beeper Configuration (писк динамиком) выключаем всё, кроме тех же RX_SET и RX_LOSS. Таким образом у нас квад будет пищать моторами и динамиком только в случае потери связи с аппаратурой (RX_LOSS) или когда мы сами захотим, настроив нужный режим на тумблер (RX_SET).
Раздел Board and Sensor Alignment понадобится тем, кто установил полётник не по стрелке, за подробностями в телегу.
Следующая страница - Power and Battery. Тут можно указать ёмкость батареи, потом настроим удобное отображение расхода.

Страница Failsafe. По умолчанию, квад просто отключает моторы в случае потери связи, и это самый безопасный для людей вариант. Экспериментировать с автопосадкой и тем более возвращением домой (а тут этот режим правильно было бы назвать "Поруби пилота") рекомендую только после опыта полётов и падений. Возможно, ничего менять не захочется.
На страницах Presets и PID Tuning ничего критичного нет - их пока пропустим. А вот для настроек на странице Receiver нам нужен привязанный к аппаратуре приёмник. Этим мы займёмся в следующей серии.
Ранее в этой серии:
Покупаем:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
5. Моторы.
6. Регуляторы.
8. Камера.
9. Видеопередатчик.
11. Очки.Итак у нас куплены все составляющие квада, можно собирать.
Без навыка пайки можно собрать полностью раму: убедиться, что все детали на месте и понять где у неё верх, низ и так далее. Примерить как будут расположены внутренности, винты и проставки для регулятора и полётника, камера. Полётник и регулятор имеют свою предполагаемую ориентацию. Регулятор обычно ставится разъёмом вверх, батарейными терминалами назад, площадки под моторы по бокам. На полётнике есть стрелка - её устремляем вперёд. И смотрим чтобы USB разъём оставался доступен. Такое расположение полётника и регулятора не потребует дополнительных настроек. Если же по каким-то причинам они так не встают, то ставим, как встаёт, а перенастроить возможность будет, но это лишний шаг в настройке - лишний шанс ошибиться. Также важно, чтобы полётник не касался ничего жёсткого, рамы или, батарейного провода, а закреплён был только на своих мягких втулках.
Видеопередатчик ставим в заднюю часть рамы, следим за тем как будет располагаться провод антенны, он не очень хорошо гнётся. Крепление на стяжку видеопередатчика или на двухсторонний скотч приёмника - это нормальная практика.
Также нужно сразу перешить полётник на свежий релиз Betaflight, пока не сделано никаких настроек. И у нас наконец праздник - вышел релиз Betaflight 4.3, а это значит, что полетник перепрошивать обязательно. Для этого необходимо установить на комп Betaflight Configurator. Перепрошить аппу и приёмник ERLS тоже хорошая идея, софт - ExpressLRS Configurator.
Для успешной пайки нам необходимо:
1. Паяльник с регулировкой температуры. Хорошим решением является паяльник на жалах Hakko T12 (конкретно жало BC2 мне нравится больше всех). Там термодатчик установлен в жале, близко к нагревательному элементу и паяльник всегда выдаёт нужную мощность для поддержания заданной температуры.
2. Припой. Бывает с флюсом бывает без. Я люблю без. Это стандартный свинцово-оловянный припой в проволоке, например ПОС-61.
3. Флюс. Если не знаете, что такое - гуглите. Без него качественной пайки не сделать, даже нет смысла разговаривать. Меня устраивает KINGBO RMA-218 с али. Флюс не должен проводить, чтоб его не отмывать, и не должен проводить после нагрева (был такой, чуть с ума не сошли).
4. Тиски или "третья рука". Без этого всё спаять конечно можно, но времени уйдёт гораздо больше.
Технику пайки смотрите в других гайдах, уверен их полно. Для нас же несколько замечаний:
1. Мощность понадобится приличная - паять батарейные терминалы. Паяльник от USB не справится (есть такой).
2. Все провода и площадки облуженные с завода (то есть с нанесённым припоем) нужно разбавить своим припоем перед пайкой. На заводах используется бессвинцовый припой, его паять вручную не так удобно.
3. Лучше проводов с силиконовой изоляцией пока ничего не придумали. Если пришлось докупать, до берите именно в силиконовой изоляции. В идеале питание вести красным проводом, землю чёрным, сигналы другими цветами, при ремонте будет сильно проще разбираться.
4. Термоусадка. Без неё жизни не представляю. Срастить провод, или сделать разветвитель. Для пайки разъёма XT60 на провод применять обязательно.
5. До уровня брать на полетушки паяльник я пока не дорос, но те кто летают много, берут. Есть модели с питанием от аккума квада.
Главное - научиться отличать по внешнему виду плохую пайку от хорошей и не лениться переделывать, если пайка плохая.
Пайка провода к площадке выглядит так:
1. Зачищаем, если нужно, провод на необходимую длину.
2. Мажем флюсом провод и площадку.
3. Берём на жало немного припоя и лудим площадку (равномерно наносим припой на всю поверхность площадки).
4. Также лудим провод независимо от того лужёный он или нет.
5. Прислоняем провод к площадке с помощью тисков или третьих рук. Одной рукой прислоняем жало, второй добавляем припой.
6. Пайка должна равномерно растечься по площадке и быть круглой и блестящей. Если убирая жало сделали острый шип, добавить флюса на пайку и снова нагреть паяльником.
7. Припоя достаточно, если сквозь него не видно жил провода.
8. Флюс на жало никогда не наносится.
9. После пайки вытерли жало об латунную стружку или специальную мокрую губку.
10. Если паяем разъём XT60 к проводу, не жалеем припоя и пропитываем провод хорошенько, пока не станет очевидно, что в провод припой не лезет (за припоем не видно жил).
11. Если не можем разогреть крупную пайку, взять на жало припоя, пайку помазать флюсом, дело пойдёт быстрее.
12. Если залепили две мелких соседних площадки, чистим жало, мажем флюсом, греем залепу. Не помогло? Снова чистим жало, наносим флюс, греем. Рано или поздно жалом уберётся лишний припой.
13. Матовая бугристая пайка - плохая, не эстетически, а механически. Оторвётся и что-нибудь замкнёт.
Считаем, что паять научились и определились как и где всё будет внутри рамы расположено.
Что и с чем нужно соединить (пайкой или разъёмом):
1. Каждый мотор с регулятором. Пайка по три провода на мотор.
2. Полётник с регулятором. Шлейф на разъёмах или разъём и пайка отдельных проводов на полётник. Четыре провода на каждый сигнал для мотора, 5В питания полётника, напряжение батареи на полётник и земля. Минимум 7 проводов.
3. Приёмник с полётником. Земля, питание и сигнал: минимум три провода.
4. Камерe c полётником: земля, питание и видеосигнал. Минимум 3 провода.
5. Видеопередатчик с полётником. Земля, питание, видеосигнал, сигнал управления (протокол SmartAudio или Tramp). 4 провода.
6. Антенна на разъёме к видеопередатчику.
7. Батарея к регулятору на разъёме.
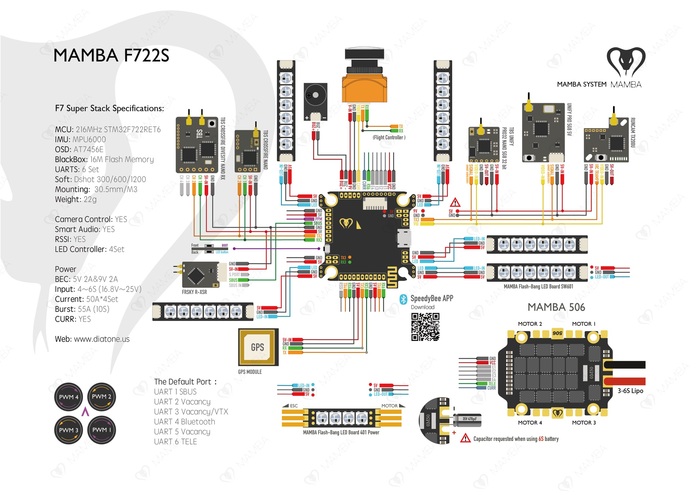
Это пример распиновки полётника, здесь показано несколько вариантов приёмников и несколько вариантов видеопередатчиков, в кваде будет по одному. Также расписана периферия, которой у нас нет: пищалка, GPS и светодиодные ленты
К регулятору паяем батарейный разъём, длину нужно рассчитать так, чтобы провода притянуть стяжкой к стойке рамы или к раме. При падении обычно улетает батарея, она дёргает за разъём и может вырвать терминалы с регулятора. Если провода притянуть к стойке, то терминалы не пострадают. Также паяем ёмкость к батарейным площадкам, хорошей идеей будет обернуть в термоусадку провода с конденсатором. Этот этап требует максимальной мощности паяльника и плохая пайка может привести как к отвалу батареи, так и к её короткому замыканию.
По пунктам выше подробно:
1. Прикручиваем 4 мотора к раме. Внимательно смотрим длину винтов, слишком длинные достанут до обмотки и мотор сгорит, слишком короткие плохо зацепятся резьбой за мотор и он отвалится в полёте. Очень хорошей идеей будет применить фиксатор резьбы. Ставим на своё место регулятор, желательно чтобы он не касался нижней пластины. Провода моторов ведём вдоль лучей и заводим за винты крепления чтобы к площадкам они подходили изнутри, то есть пространство между платой регулятора и полётника будет занято проводами моторов. Порядок пайки проводов на площадки не важен, хоть он и определяет в какую сторону будет крутится мотор, нам всё равно это настраивать в прошивке.
2. Если полётник и регулятор куплен комплектом, то соединяем их шлейфом и всё. Если же куплены отдельно, то нужно обязательно найти распиновки регулятора и полётника и убедиться, что шлейф из комплекта имеет верную конфигурация. Не полагайтесь на авось, стандарта нет, спалить электронику шанс велик. Можно переделать шлейф, аккуратно вынимая контакты из разъёма и вставляя в нужной последовательности. Иногда в комплекте есть шлейф с разъёмом на одном конце и с обжатыми проводами на другом, и пустой разъём. Наша задача собрать разъём согласно распиновки. На полётнике будут помимо разъёма отдельные площадки дублирующие контакты разъёма, можно использовать их.
3. Приёмник подключается к сигналу одного из интерфейсов UART. Так как он передаёт информацию, а полётник получает, то на приёмнике вывод TX нужно соединить с выводом RX# на полётнике (где # - номер UART интерфейса, который мы в прошивке потом укажем как SerialRX вход). Площадки питания и земли обычно рядом с одним из RX как раз для приёмника.
Причём площадка питания обычно обозначена как 4V5 и напряжение на ней появляется даже тогда, когда полётник подключен по USB, а батарея отключена. Это очень удобно при настройке в дальнейшем.
4. В полётнике площадка для камеры обозначена CAM или VIN. Провод видеосигнала желательно делать минимальной длины. Земля и питание также обычно рядом. Обратите внимание на диапазон питания камеры, он может требовать батарейного напряжения или 5В, выбирайте площадку соответственно, они обычно есть рядом. Камеру не забываем задрать вверх, угол можно сделать как в симуляторе, а лучше чуть ниже.
5. Для видеопередатчика обычно используется напряжение батареи, а управление также использует интерфейс UART. Тут уже полётник шлёт информацию на видеопередатчик и мы соединяем TX# свободного UART с площадкой которая может называться SA, SmartAudio, Tramp или как-то ещё. Также потом в настройках укажем что этот UART мы используем под протокол TBS SmartAudio или IRC Tramp. Площадка для видеосигнала обозначается VOUT, VID или VTX.
6. Антенна крепится обычно на смекалке, стяжках и изоленте. Ну или если есть сзади рамы крепёж под кабель, то цивилизованно. Без антенны питание на видеопередатчик лучше не подавать.
7. Батарея притягивается лямками (лучше две), под лямку можно заправить балансный и разъём питания. Вообще лучше сразу определиться с быстрым и удобным способом подключения батареи, её креплением лямками и фиксацией проводов и балансного разъёма. Этот ритуал нам повторять много раз за выход в поле. Под батарею иногда в комплекте есть нескользящая мягкая прокладка, если её нет, то рекомендую наколхозить. Работают силиконовые наклейки в обувь от мозолей.
Основная идея - сделать так, чтобы ничего лишнее не торчало за пределы рамы. Антенна при этом должна торчать прочно и не попадать в пропы.
Очень сильно поможет, как я уже писал, вести питание красным проводом, землю - чёрным, а сигналы цветным, видео обычно жёлтый и т. д. С другой стороны, если у вас разъём или компонент с красным и чёрным проводом, не поленитесь прозвонить и убедиться где питание и земля, у китайцев тоже бывают понедельники. Обычно земля приходит на металлические корпуса разъёмов и компонентов, металлизацию отверстий крепления, радиаторы. Если красный провод звонится на землю - что-то ту не чисто.
Многие рекомендуют покрыть всю электронику лаком, я тоже так делал, но ну уверен в эффективности затеи. Лак Plastik-71 как раз для этого создан, главное не залить кнопки и чип барометра на полётнике.
Однозначный порядок пайки и сборки указать не представляю возможным, всё индивидуально и собирать и разбирать квад иногда приходится по нескольку раз. Может не хватить проводов, винтов, проставок и прочего из комплекта и придётся что-то придумывать, докупать, колхозить. На этом этапе возникнет миллион вопросов не затронутых тут и я, как обычно, готов на них ответить в телеге ch347 - CHEAT:.
После сборки можно прозвонить разъём питания, он звониться не должен, но первую секунду может звониться, пока заряжается конденсатор от мультиметра. Хорошей идеей будет использовать так называемый Smoke Stopper.
Через него первый раз подключается батарея и он не даёт сгореть электронике, если что-то напортачили.
Эконом-версия делается самостоятельно из автомобильной лампы дальнего света.

Подключение питания - ответственный момент, проверьте всё трижды, и, если всё собрано правильно, то квад пропищит моторами: три коротких и два длинных писка разной высоты.
В следующей серии мы будем квад настраивать.
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
5. Моторы.
6. Регуляторы.
8. Камера.
9. Видеопередатчик.
10. Аккумулятор и зарядник.Очки мы надеваем во время полёта, чтобы всё наше поле зрения было занято картинкой с дрона. Это даёт невероятный эффект присутствия и возможность не отвлекаться на происходящее вокруг. Без очков тоже можно летать fpv - прикрепить на пульт экран, но его нужно защитить от солнца и на нём всё-таки хуже различаются мелкие движения, об эффекте присутствия и не говорю.
Очки по форм-фактору делятся на два типа: собственно очки (Fatshark HDO2, Skyzone SKY04X) и шлем (Fatshark Scout\Recon, Skyzone Cobra S\X, Eachine EV800D). Шлемы обычно дают больший угол обзора чем очки. Грубо говоря, в шлеме это первые ряды кинотеатра, а в очках - последние. Некоторым в шлеме не нравится то, что приходится переводить взгляд с центра на края, чтобы увидеть напряжение батареи, например. Понятно, что это очень индивидуальная вещь по удобству, и идеальным вариантом было бы прийти в магазин или полетушки других пилотов и примерять очки на месте.
Для приёма картинки на очках должен быть, как ни странно, приёмник. Вот он бывает встроен в очки, а бывает лишь разъём для подключения стандартного приёмника. Те же Fatshark HDO2 стоят 500$ без приёмника, из коробки они бесполезны!

Приёмные модули имеют своего лидера - это ImmersionRC RapidFire, ничего лучше не придумали и вряд ли придумают, век аналогового видео подходит к своему закату. TBS Fusion и Foxeer Wildfire - модули похожие на RapidFire по заявленному функционалу (подробности, если нужны, спрашивайте в телеге ch347 - CHEAT: ). В нижнем ценовом сегменте Eachine PRO58, Reallacc RX5808, приёмники AKK и даже noname.

Из очков со встроенным приёмником есть популярный Eachine EV800D, Fatshark Scout и Recon.
Антенны: приёмник, независимо от того встроен он или нет, обычно двухканальный (diversity).
Видео одновременно принимается на две антенны, а электроника приёмника показывает лучшее из двух или даже составляет хороший кадр из двух не очень. Две антенны обычно ставят разные, одна всенаправленная (omnidirectional), то есть хорошо принимает вокруг, а другая направленная (directional), то есть имеет направление, в котором принимает лучше всего, причём дальше, чем всенаправленная. При этом история с поляризацией не меняется, они всё так же делятся на RHCP и LHCP и должны совпадать. Если в комплекте к очкам или модулю антенна в виде палки (как на wifi роутере), то её есть смысл поменять.

Направленные антенны часто называются патч (patch), самый популярный тип Triple Feed Patch

Так как дизайн опубликован открыто и их делают много и дёшево. Плюс переключение RHCP <> LHCP в комплекте, только, как на ней написано, нужно неиспользуемый разъём заглушить сопротивлением на 50Ом, чтобы характеристики оставались оптимальными, а заглушки в комплекте может не быть.
В очках Fatshark Scout, к примеру, встроен не только приёмник, но и одна антенна - RHCP патч, так что поляризацию выбирать не приходится.
Всенаправленные антенны ничем не отличаются от таких же передающих на кваде, на очки проще поставить подлиннее, чтобы было выше головы.
Почти у всех очков есть возможность записи видео на флешку (DVR) - иногда единственное спасение при поиске потерявшегося квада. Включайте запись всегда или настраивайте автовключение. Среди других функций, вентилятор от запотевания, настройка межзрачкового расстояния и настройка диоптрий или возможность одеть поверх очков. Всё это, как я уже говорил стоит смотреть вживую.
Органично не получилось, пропеллеры забыл. С пропами всё просто, они маркируются 4 цифрами 5042, например. Первые две это 5 дюймов диаметра, иногда есть 51XX и 52XX пропы, с ними нужно быть внимательным, они чуть больше стандартных и могут не поместиться в раму.
Последние две цифры - это угол атаки лопасти, чем больше, тем ближе к вертикали (обычно в диапазоне 40-50). Можно относится к этому параметру как к передаче. Низкое значение - низкая передача, проп тяговитый и медленный; высокое значение слабее тяга, быстрее максималка. Как мы помним, у моторов параметр KV тоже подавался с этой аналогией, так что двумя параметрами мы можем либо скомпенсировать ненужный, либо усилить нужный эффект. Я не уверен, что при слепом тесте различу 5040 и 5050 проп, так что сейчас нам это неважно. Пропы делают Dalprop, Gemfan, HQProp. Современные модели стали очень крепкими и сошлись на конфигурации в три лопасти. Ещё есть маркировка типа 5.1X3X4.5 - это аналог 5145 с тремя лопастями. Продаются комплектами по 4 или больше. В комплекте половина пропов левого, половина правого вращения. Пропеллеры - это основной расходник, обычно гнутся после краша и выгибаются обратно руками. Потом начинаются заметные вибрации и проп меняют. Для первых полётов хорошо бы иметь несколько комплектов.

В следующей серии начинаем сборку!
В этом выпуске мы органично закрываем вопрос выбора компонентов летающих и переходим к наземным
Ранее в этой серии
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
5. Моторы.
6. Регуляторы.
8. Камера.
9. Видеопередатчик.
Аккумулятор или батарея питает всю электронику на борту. По весу аккум сравним с остальным дроном, поэтому от него зависят лётные характеристики квада. А от ёмкости зависит время полёта, но чем больше ёмкость, тем тяжелее, поэтому для квада определённого размера и динамики подходит достаточно небольшой диапазон ёмкостей аккумулятора. В нашем случае это 1300 - 1600 мАч. Меньше будет летать мало, больше - медленно. При этом 5 минут динамичных полётов - это норма, или 10 минут "блинчиком". Сразу становится ясно, что одним аккумулятором не обойтись, для оправдания выхода на улицу со всем барахлом нужно хотя бы минут 20 полётов, то есть 4 аккума. Бренды Tattu, GNB, Ovonic, CNHL делают хорошие аккумы.
Дешёвые от дорогих будут отличаться соотношение ёмкости на вес, внутренним сопротивлением и ресурсом, поэтому я не рекомендую экспериментировать. Напомню, у нас литий-полимерные (LiPo) четырёх-ячеечные батареи (4S).
Крепится аккумулятор к раме лямкой. Лучше прошитая, с прорезиненной поверхностью и металлической пряжкой. Дешёвые Eachine рвутся при первом краше. Обесточенный квад искать в поле гораздо веселее, чем тот который пищит и вещает картинку, так что качество лямки иногда может быть решающим фактором.
И ещё важная информация: запасённой энергии в одной батарее достаточно, чтобы устроить пожар; литий очень тяжело тушить - ему для горения не нужен кислород. Следите за состоянием батарей, храните в пожаробезопасном месте, избавляйтесь (желательно экологично) от всех сомнительных экземпляров не раздумывая.
Далее будет лекция об особенностях литий-полимерных батарей, это важно для пожаробезопасности, тут сокращений для новичков не будет:
Дело в том, что для LiPo вредно:
1. Разряжаться током выше номинального.
2. Заряжаться током выше номинального.
3. Заряжаться до напряжения выше максимального (не только вредно, но и опасно).
4. Разряжаться ниже 3.3В на ячейку.
5. Лежать полностью заряженным.
6. Лежать полностью разряженным.
7. Плюс, если ячейки заряжены неодинаково, то в процессе использования мы можем просадить одну ячейку ниже 3.3В.
Внутри батареи нет умной электроники, чтобы за этим следить, потому что нам важен вес и обычно нам важнее вернуть весь квад, чем сохранить батарею (в случае переразряда).
LiPo ячейка имеет максимальное напряжение и номинальное. Допустим мы зарядили батарею правильно до конца - это до напряжения 4.2В (сейчас для простоты возьмём одну ячейку, а не 4 как в нашей батареи). Если разряжать её неизменным током, то напряжение быстро упадёт до 3.7В, большую часть работы напряжение будет 3.7В, а под конец резко начнёт падать до нуля, где 3.3В наш критический уровень, ниже него батарея деградирует. Так вот 4.2В - это максимальное напряжение, а 3.7В - номинальное.
Есть ячейки другого типа - High Voltage (HV), там значение номинального напряжения 3.8В, а максимального 4.35В.
Типичная батарея выглядит так:

Указана ёмкость (1550мАч), ток разряда (120C о нём ниже) и мелко количество ячеек (4 cells), номинально напряжение всей батареи (4*3.7=14.8В) и ёмкость в Вт*ч, как и положено нормальной батарее (22.94 Вт*ч), нам пока это не важно.
Выходят два разъёма, силовой, и балансирный (видно плохо, белый с маленьким красным проводом).
Стандарт разъёма - XT60, батареи с другим разъёмом могут тоже подойти по параметрам, но, видимо, созданы для других задач и их лучше не брать (перепаивать разъём у батареи занятие не самое расслабляющее).
Максимальный ток разряда и заряда принято обозначать в единицах 'C' - это capacity, ёмкость. То есть ток в "1С" для батареи ёмкостью 1550мАч будет равен 1550мА. Максимальный ток разряда батареи на картинке 120C, то есть 120С*1550мАч=186А. Если разделить 186А на 4 регулятора, получится 46,5A. То есть при полной нагрузке на все моторы, независимо от моторов и пропов, на каждый регулятор придётся по 46,5А - это к пройденному вопросу о мощности регуляторов. Хорошая батарея может спалить плохие регуляторы.
Теперь с этими знаниями по вышеупомянутым пунктам подробно:
1. Перебор по току разряда вызывает нагрев и деградацию батареи - это опасно, ток разряда в 70C я бы взял за минимум, но тут больше не на цифры нужно смотреть, а на бренд.
2. Стандартным током заряда считается 1С, то есть нашу батарею безопасно заряжать током 1.55А, времени это займёт ровно час. Получается любую LiPo батарею заряжать безопасным током в 1С ровно час. В спецификациях часто пишут, что ток заряда может быть больше, например 2-3С, таким образом мы сокращаем время заряда до 30-15 минут. Отмечу, что это требует от зарядника соответствующего тока. Я все свои аккумы заряжаю током 1С, дальше для этого будут причины. Перебор по току заряду - нагрев и все вытекающие последствия.
3. Тут всё просто, зарядник должен правильно выполнять цикл заряда и прекращать при правильном напряжении.
4. Отследить напряжение разряда - задача пилота, поэтому у нас в очках должно быть напряжение батареи и настроенные оповещения, дальние миссии должны планироваться уже со знанием дела. Если квад упал из-за разряда батареи, всё - батарее хана. Она не будет больше выдавать максимум своих возможностей, будет греться и сильнее проседать под нагрузкой.
5 и 6. Лежать полностью заряженной батарее вредно, она теряет ёмкость, лежать полностью разряженной вредно из-за того, что напряжение может упасть ниже 3.3В и батарея деградирует. Безопасное состояние хранения - заряженной на 80%, или при напряжении 3.8В. Такой режим заряда\разряда есть у хорошего зарядника. Полетали и знаем, что в следующий раз выберемся через месяц? Батареи в режим хранения.
7. Выравнивание напряжений ячеек происходит тоже программой зарядника и для этого используется балансирный разъём.
Теперь совсем не сложно понять, почему нам нужен специализированный зарядник для LiPo батарей.
Посчитаем сколько ватт нам нужно от зарядника, чтобы зарядить наши 4 батареи безопасно. Если мы их будем заряжать друг за другом, то справимся за 4 часа и нужно нам будет 1.55А*4.2В*4 (ток заряда * напряжение ячейки * количество ячеек ) = 26Вт. Но можно использовать плату параллельной зарядки и увеличив ток (и мощность) в 4 раза уменьшить время заряда во столько же. Теперь мы заряжаем час но требуется нам уже 104Вт. Если мы хотим летать не 20, а 40 минут, то нам нужно 8 батарей и без платы параллельной зарядки и мощного зарядного устройства нам придётся стоять на вахте у зарядника 8 часов. Либо повышать ток заряда до 2С и более, что может сказываться на ресурсе батарей.
Самое смешное, что на зарядных устройствах хоть и указывается максимальная мощность, большинство из них работает не от розетки, а от источника постоянного тока (блока питания) и его покупать нужно отдельно.
Итак мы пришли к выводу, что нам нужно три вещи, зарядное устройство, блок питания к нему и плата параллельной зарядки.
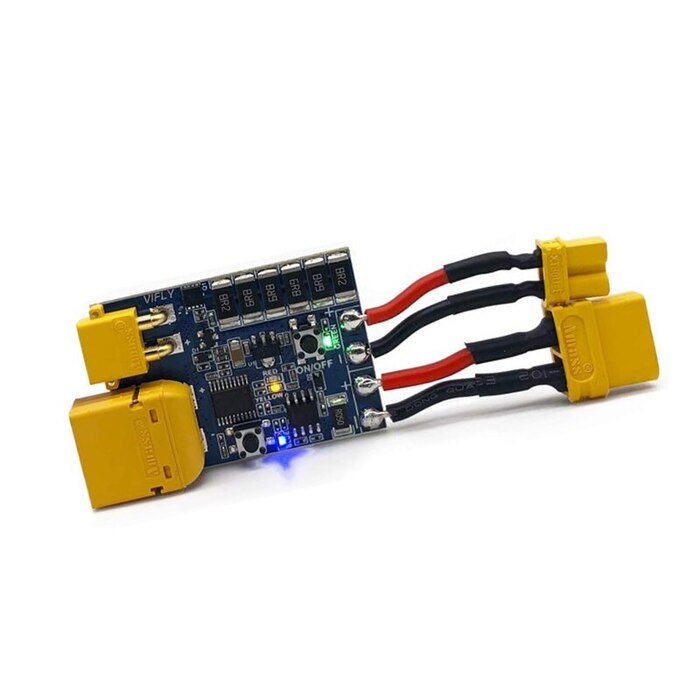
Начнём с простого, платы параллельной зарядки:
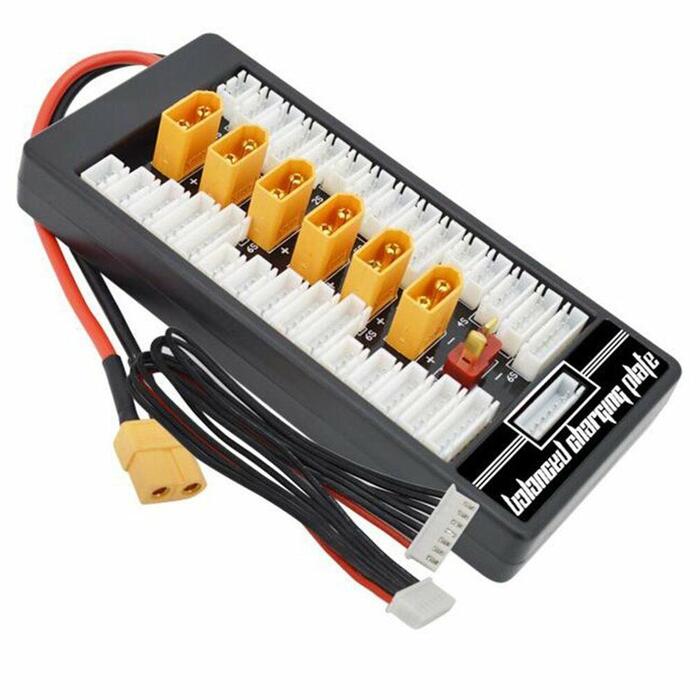
Она из себя ничего сложнее чем разъёмы соединённые проводниками не представляет, там нет никакой электроники. Есть дорогие версии со светодиодами и восстанавливающимися предохранителями, но сути это не меняет. Хотя я бы прозвонил дешёвый экземпляр для верности. И Т-разъём (красный на картинке) либо выпаять, либо заглушить крышкой нужно сразу. Если подключены в параллель шесть заряженных батарей, при его случайном замыкании ток будет 186А*6=1116А. Хотел сравнить с током сварки, но выяснилось, что там 100А - это максимум.
Параллельно заряжать можно батареи одного номинального напряжения и разной ёмкости. При этом фактическое напряжение батарей должно быть одинаково, плюс-минус 0.1В. Иначе повредим батарею. Как обычно за подробностями о параллельной зарядке пишите в телегу ch347 (CHEAT:), тема очень тонкая и подходить нужно с головой.Зарядное устройство. Очень популярна была модель Imax B6, одна из первых универсальных и недорогих зарядок. У неё слишком маленькая мощность и очень небольшой ток балансировки (значение, которое почти никто не указывает) из-за этого заканчивает заряд она гораздо позже часа. Компания ISDT делает широкий ассортимент зарядок под наши нужды и есть модели с блоком питания. Как мы выяснили для 20 минут полёта нам нужно 100Вт зарядки, поэтому я бы рассматривал зарядки от 500Вт, этого точно хватит надолго.
Только нужно внимательно читать спецификации, например у ISDT 608AC в комплекте блок питания на 60Вт (несерьёзно) но сама зарядка тянет 200Вт. Смысл блока питания только в портативности, брать с собой проще маломощный блок.
Также входное напряжение зарядки может быть в широком диапазоне например у ISDT Air8 на вход можно подать от 10 до 34 вольт и блок питания лучше брать с напряжением ближе к верхнему пределу на 24В или 30В.
Многоканальная зарядка нам не нужна, когда в ней возникнет необходимость, вы уже будете знать всё лучше меня.
Блок питания может быть вообще любой. Если знаете, как заставить выдавать напряжение компьютерный блок питания без материнской платы, то можно использовать и его. Главное это три вещи: напряжение в пределах допустимого входного для зарядки, максимальный ток (и мощность) слегка перекрывающая заявленную мощность зарядки и разъём XT60 на выходе (или паяем сами). Продают даже б\у блоки питания от серверов HP, сразу с перемычкой для простого запуска и припаянным разъёмом XT60.
Следующая серия - очки.
Продолжаем наш путь FPV пилота - это серия постов как стать им с нуля.
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
5. Моторы.
6. Регуляторы.
8. Камера.Как мы знаем, камера шлёт картинку на полётник, он в свою очередь дополняет изображение текстовой информацией и передаёт на видеопередатчик, а видеопередатчик конвертирует картинку в радиоволны телевизионного стандарта и шлёт на заданной частоте и мощности в окружающее пространство. Из этого следует, что при наличии приёмной аппаратуры в зоне вещания, ваш видеосигнал может увидеть любой. Можно ходить со своими очками на fpv-мероприятия и наблюдать за участниками, или брать вторую пару очков на полетушки, чтобы "катать" друзей или интересующихся прохожих.
Как ни странно, но передатчики только сейчас стали обретать стандартную форму 30x30 и многие модели до сих пор не имеют отверстий крепления, приходится применять смекалку при постройке квада.

Выбор в нашем случае состоит в максимальной мощности и в общем-то всё. Насколько я знаю максимум сейчас 1600мВт, но значение в 1000мВт считается достаточным. Нужно не забывать, что для увеличения дальности приёма в 2 раза мощность передачи нужно увеличить в 4, так что не так сильно будет заметна разница между 800мВт и 1000мВт. Также стоит обратить внимание на разъём антенны. Компактным и надёжным решением будет MMCX разъём. Как правило в комплект с передатчиком не входит антенна, а без неё нельзя даже включать некоторые передатчики.
В спецификациях к передатчику будет указано количество каналов, обычно это число 40, но смотреть на него не нужно. Любой современный передатчик поддерживает диапазон RaceBand, который разделён на 8 каналов, их нам будет достаточно, остальные "каналы" всё равно находятся внутри этого диапазона. Также иногда предлагают выбрать между вариантом US и International. В Америке запрещено вещание на некоторых частотах, поэтому в версии US они будут заблокированы; отсюда вывод - брать нужно версию International. Некоторые компании с завода блокируют эти каналы с возможностью разблокировки. Зачем нам вообще переключать каналы? Только чтобы одновременно летать нескольким пилотам.
Про антенны тоже здесь поговорим. Помимо разъёмов стандарта MMCX популярны SMA и RP-SMA:

Есть рамы у которых предусмотрено крепление SMA разъёма в задней части и если мы решили его использовать, то нам нужен кабель MMCX - SMA:

А к нему уже прикручивать антенну с соответствующим ответным разъёмом. Заметьте, антенна с SMA-RP-male прекрасно накрутится на SMA-female, только контакта центральной жилы не будет и видео мы будем принимать или передавать очень хреново. Как альтернатива купить сразу антенну MMCX, просто чуть длиннее, благо выбор есть. Меньше разъёмов - меньше потери сигнала, да и чуть легче. Кстати, кабель к этим разъёмам приходит коаксиальный и качественно в домашних условиях напаять разъём или починить обрыв не выйдет.
Ещё антенны делятся по типу поляризации сигнала. Линейная (linear) обычно у мелких квадов, а у больших имеет смысл круговая поляризация двух типов, правого (RHCP red hot chili peppers right hand circular polarization) и левого (LHCP) вращения. Идея в том, что сигнал одной поляризации (излучаемый антенной) плохо принимается антенной другой поляризации даже на верной частоте. Нам нужно только помнить, что поляризация антенн должна совпадать на передатчике и очках. Зачем нужна поляризация? В идеале, чтобы 8 человек летали минимально мешая друг другу, выдавать каналы нужно с чередованием поляризации, то есть соседние частоты должны вещать с противоположной поляризацией. Останется выбрать длину антенны: короткая меньше страдает при падениях, но может затеняться квадом при манёврах, длинная - наоборот: лучше покрывает, проще оторвать. Ну и добавлю, что на дрон у нас всегда ставится всенаправленная антенна. Про антенны приёмника в посте об очках.
Если включить передатчик без антенны, то вся мощность излучения пойдёт в нагрев и передатчик может сгореть, хорошие передатчики автоматом определяют такую ситуацию и выключаются или снижают мощность, но проверять эту функцию лишний раз не стоит.
Компании AKK, Foxeer, Rush, Diatone выпускают годные передатчики. Антенны делают Foxeer, iFlight и Rush.
В следующей серии - аккумуляторы и зарядник.
