


Ответ на пост «FPV фристайл. Проверка тумблеров по-умолчанию»
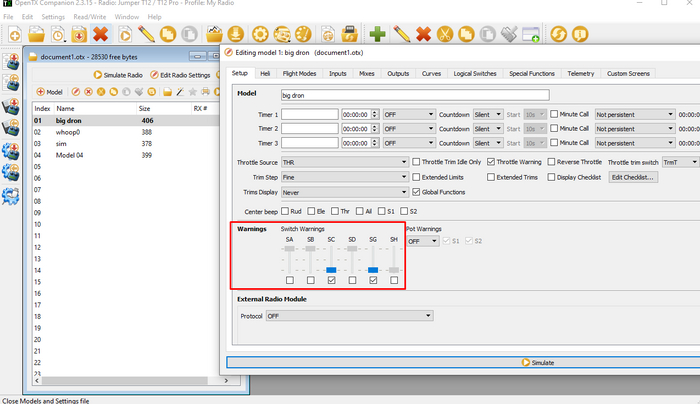
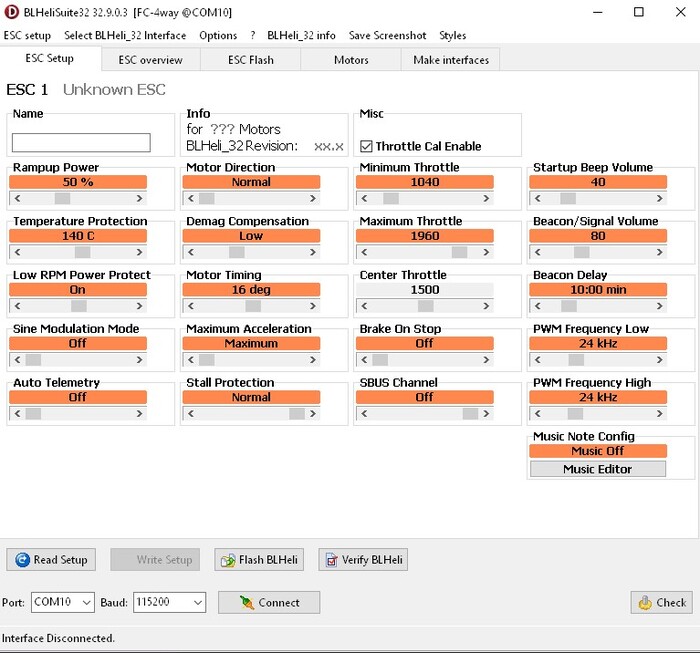
Еще можно поставить OpenTX Companion и не дрючиться с кнопочкоми на пульте, а настраивать все на компе. На скрине настройки предупреждений тумблеров, включено предупреждение на арм и преарм. И еще можно добавить звуковое оповещение на тумблер, я сделал "двигатели запущены/выключены" на преарм.
Кстати тренировки с дизармом в симуляторе помогли, вот пока что последний полет вупа, отказал один двигатель, видно, что я его задизармил еще во вращении.
Показать полностью
1
1

FPV фристайл. Проверка тумблеров по-умолчанию
Мы продолжаем углубляться в тонкости fpv фристайла. Для случайного читателя снова напомню, что, если вы прочитаете мои посты со второго до последнего, то сможете купить, собрать, настроить и управлять фристайл квадрокоптером.
Сегодня настроим аппаратуру, так, чтобы она предупреждала нас перед включением, от том, что некоторые тумблеры выставлены в неверное положение. Например нам не нужно, чтобы при включении аппы квад сразу армился (включались моторы) - это опасно. Но тумблер арма мог случайно переключиться в рюкзаке, а перед включением мы забыли проверить самостоятельно.
Мы можем заставить аппаратуру автоматически проверять положение тумблеров и напоминать нам переключить их перед включением.
Скрин будет для Radiomaster Zorro, но разница с другими будет минимальная.
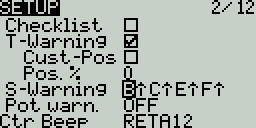
Нажимаем кнопку MDL, дальше PAGE, отображается меню SETUP. В нём крутилкой идём до строчки S-Warning и нажимаем на крутилку. В строке перечислены все двух- и трёхпозиционные переключатели. Здесь мы задаём положение, в котором аппа позволит нам её включить. Если положение отличается от заданного, то аппа не включится (не станет передавать команды по радио), пока переключатели не займут настроенное положение (возможность проигнорировать тоже будет).
Тумблеры обозначены буквами, эти буквы можно найти на корпусе рядом с переключателем (будет SA, SB, SC..., что в интерфейсе соответствует A, B, C...).
По умолчанию рядом с буквой - пробел. Это означает не учитывать положение тумблера.
Выбрав букву крутилкой, мы можем нажатием менять настройку. Стрелка вверх или вниз означает крайнее верхнее или крайнее нижнее положение тумблера соответственно. Прочерк означает среднее положение для трёхпозиционного тумблера. Удобно настроить тумблеры все вверх или все вниз, тогда можно быстро, наощупь их переключить в нужное положение перед включением.
Эта функция - не единственная, которая предотвращает случайное включение квада после подачи питания, но настроить её необходимо, так как максимально безопасным квад становится тогда, когда все функции настроены правильно и есть право на ошибку (человеческую или программную).
Жду всех в телеге с вопросами (не канал =).
Показать полностью
1

По полям, по лесам, жёлтый трактор едет к нам...
Красивые урожайные поля с дрона. Коптер самодельный, видеосистема DJI FPV, аппаратура управления TBS Tango 2. Коптер на одном аккумуляторе может суммарно пролететь 22км. Приятного просмотра друзья и всем хорошего настроения.
FPV Фристайл. RPM filtering
Для случайных читателей: я в серии своих постов "научил" читателя выбирать, собирать настраивать и управлять фристайл дроном и теперь продолжаю углубляться в тонкости этого хобби. Предполагается, что ваши знания ограничиваются только моими постами.
Сегодня настроим RPM filtering - фильтрацию вибраций основанную на оборотах двигателя. Эта функция эффективно улучшает качество полёта (а c ним и картинку) так как динамически подстраивается под основной источник вибраций - вращение моторов.
Для выполнения этой задачи, полётник должен знать текущее значение RPM (обороты в минуту) каждого мотора. Эту функцию добавили в прошивку регулятора относительно недавно, поэтому алгоритм выглядит так:
1. Прошить свежую версию BLHeli_32 (или убедиться, что свежая уже прошита).
2. Включить двунаправленный протокол управления моторами (Bidirectional DShot).
3. Убедиться, что считывается верное значение RPM.
4. Включить RPM фильтрацию в полётном контроллере.
5. Отключить более простой фильтр.
Теперь по пунктам подробнее.
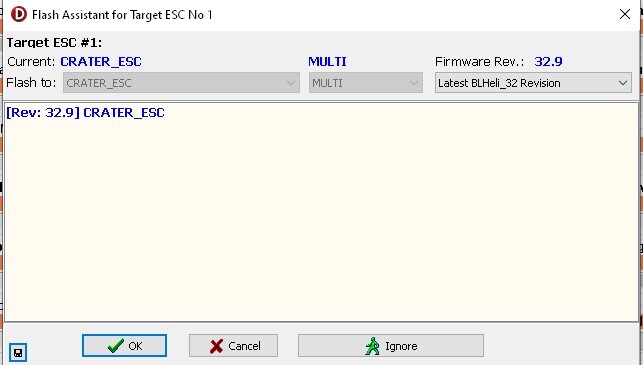
1. Прошить регулятор можно только когда он соединён с полётником и на него подано питание, поэтому лучше это делать на собранном дроне. Нужен софт BLHeli_32 Suite. Подключаем полётник к компу, а батарею к регулятору (квад без пропеллеров!). Нажимаем Connect и Flash BLHeli.
Выбираем последнюю версию и жмём OK.
Закрываем BLHeli32 Suite и отключаем батарею.
2. Запускаем Betaflight Configurator и на вкладке Motors включаем Bidirectional DShot. Для правильной работы полётнику нужно знать сколько магнитов в моторе, но значение по-умолчанию работает для абсолютного большинства моторов подходящих для нашего 5-дюймового квада. Если вы настраиваете что-то другое, лучше по моим постам этого не делать.

3. Дальше можно подключить батарею и ползунком запускать каждый мотор. В поле R: должны появиться обороты, а поле E: (ошибки) должно оставаться на нуле. Отключаем батарею.
4. Дальше вкладка PID Tuning и раздел Filter Settings, там включаем Gyro RPM Filter.

При включении будет напоминание, что нужно настроить всё, что мы настроили и автоматически применится настройка фильтра.
5. Теперь можно отключить фильтр Gyro Lowpass 1 (или это произойдёт автоматически)

Всё, теперь фильтрация будет динамической и зависеть от оборотов двигателя.
Чем больше фильтров, тем больше времени нужно полётнику на реакцию, тем менее "отзывчив" квад, однако без фильтров реакция на вибрации заставит слишком часто и интенсивно реагировать моторами на ситуацию и приведёт к большому расходу, шуму и нагреву моторов. А иногда и к "положительной обратной связи" - ситуации, когда слишком резкие корректировки приводят к ухудшению ситуации и к ещё более резким корректировкам. Поэтому экспериментировать с фильтрами нужно со знанием дела. Только что настроенный фильтр - один из немногих полезных и безопасных настроек фильтров, который улучшает поведение и раскрывает потенциал микроконтроллеров на борту.
Как обычно телега для всех вопросов.
Показать полностью
5
FPV фристайл. FAQ
Собрал ответы на самые частые вопросы (с повторами из прошлых постов).
Предполагаю, что вы уже знаете, что такое fpv квадрокоптер и фристайл. Если нет, то вот мой первый пост из серии, а вся серия в профиле.
1. Сколько стоит?
За 50к полный набор: пульт, шлем, аналоговый дрон несколько батарей и зарядник с БП. Следующий дрон уже не потребует большей части трат: на шлем, пульт, батареи (не всегда) и зарядник с БП.
2. Почему так дорого? Вон на али есть дрон всего за <мало денег> рублей!
Собранный нами дрон будет невероятно динамичный, подрыв с места будет выглядеть как если с разбегу пнуть мяч. Готовые недорогие дроны имеют тягу чуть больше чем нужно, чтобы просто висеть в воздухе. Фристайл же дрон имеет тягу перекрывающую массу в разы. Помимо этого, наш дрон специально спроектирован для падений - это его базовый функционал. В тесных пространствах другие дроны будут летать либо до первого столкновения, либо очень медленно.
Если в недорогом дроне есть камера, то она всегда отвратительного качества (что поначалу не мешает радоваться видео с воздуха) и, если вещает картинку по wifi, то летать по ней динамично невозможно, так как задержка будет порядка секунды и этого просто слишком много, чтобы адекватно управлять квадом.
3. А сколько стоит научиться? По-любому будут же падения.
Нисколько, если начать с симулятора и выходить на улицу только после адекватно набранного опыта. Тогда падения будут не фатальными и приведут лишь к новой царапине на раме. Не устану повторять, что научиться летать акро сложно! Несколько десятков часов в симуляторе обязательны даже если вы - лётчик-истребитель. Больше всего времени уйдёт не на постройку и настройку дрона, а на приобретение навыка пилотирования.
4. Так раз симулятор так хорош, зачем вообще выходить на улицу?
Любой симулятор - условность и если вы учли всё в этой условности, это всё равно мало соотносится с реальностью. А вот учесть всё в реальности - это реальный навык, который поможет развить другие навыки (см. пункт 8).
5. Меня тошнит только от просмотра фристайл-видео, как управлять при этом?
В автомобиле тоже водителя со стажем может тошнить, когда он едет пассажиром. Это потому, что он не знает манёвра реального водителя и ускорения и торможения застают вестибулярку врасплох. Тут так же, смотреть чужие видео сложнее чем управлять, хотя и первые свои видео будут тот ещё блеватрон. Но поначалу, конечно, лучше летать сидя. Привыкаешь быстро и больше о проблеме не вспоминаешь.
6. У пилота нечеловеческая реакция, у меня такой нет.
Это так кажется. Пилот хорошо знает местность, летал эту линию несколько дублей, а повадки квада у него в мышечной памяти, поэтому он всё делает ровно вовремя. Для зрителя же происходящее предстаёт в первый раз.
7. Видео ускорено, я же вижу.
А вы видели неускоренное видео? С чего вы решили? Квад управляется по всем трём осям очень и очень динамично, при правильном планировании траектории можно пролететь её уверенно и быстро. Нет никакого смысла ускорять видео, все соревнования проводятся вживую, а все талантливые пилоты известны и зарабатывают на жизнь не на Ютубе (чтобы хайповать на фейках). Кстати, любому скептику дам очки и время-место местных дрон гонок (или тренировок), чтобы он сам увидел уровень пилотирования дрона средним пилотом. А для фристайл-пилота это своеобразное достижение, когда наконец в комментах к его видео появляются обвинения в ускорении видео.
8. Какой в этом практический смысл?
Такой же, как и в любом хобби. Каждый находит своё, но чтобы не размазывать умные слова, скажу конкретно. Опыт успеха в чём-то - неотъемлемая часть развития человека. Знать, что ты можешь, если захочешь, делать конкретные вещи очень важно, и этого знания многим не хватает в жизни. Пробуй, учись, ошибайся, совершенствуйся в каком-то деле и пойми, что ты научился пробовать, учиться, ошибаться и совершенствоваться во всём.
9. Зачем собирать, если есть готовый?
Становится доступен самостоятельный ремонт, узнаются принципы работы всех компонентов, можно улучшать дрон и другие компоненты постепенно, можно тестировать новые компоненты, понимаешь какие вещи удобны, а какие - маркетинговый пук, ну и кайф от успешно собранного дрона. А готовых наборов дронов именно фристайл 5-дюймовых в продаже почти нет, всё равно придётся отдельно покупать и разбираться с аппаратурой и видеоканалом.
10. Можно ли на этом зарабатывать?
Можно, однако запрос на сложные техничные полёты невысок и его перекрывают немногочисленные профессионалы, а на облётах недвижимости и внутри заведений достаточная конкуренция.
11. Как летать по закону?
Это тёмный вопрос в наше время. Я не могу дать правильных рекомендаций, но в худшем случае нужна регистрация дрона на сайте и предоставление плана полёта за несколько дней, звонок за час и непосредственно перед вылетом, а также при видеосъёмке может потребоваться предоставление всех записей в ФСБ.
12. А зимой можно летать?
Да, обычно проблемой становятся замерзающие руки, а дрон, если батарея была в тепле, ведёт себя совершенно так же. Падения в снег, при правильном реагировании, повреждения не наносят. Также можно покрыть электронику лаком для пущей водостойкости. В дождь, кстати, летать не выйдет, одна капля на камере может полностью испортить изображение.
13. Как долго\далеко летает?
Отправной точкой по времени берём 5 минут, по расстоянию - 1км прямой видимости. Это плата за лучшую манёвренность среди всех дронов, её можно разменять на время и дальность построив более медленный дальнолёт\долголёт. Почему ставим манёвренность в приоритет? Потому что цель - пилотирование, а не съёмка или шпионаж =) Если опять сравнить с автомобилями, то ресурс шин у дрифт- или джимкхана-болидов куда меньше, чем у дальнобойного семейного минивэна, да и расход будет поболе.
14. Бабки не проблема - заверните самое лучшее.
Цель - не собрать идеальный квад, а вникнуть в тему и выяснить, что хочется конкретно вам. Поэтому гораздо эффективнее будет на имеющиеся деньги собрать по моему (или другому) гайду дрон такой, какой получится, а потом самостоятельно, с учётом полученных знаний и своих хотелок, собрать свой личный идеал. Параллельно приобрести навыки пилотирования, чтобы от полётов долго и уверенно получать удовольствие, а не ремонты и траты времени и денег на запчасти.
15. Хочу летать, но бабки - проблема, мне бы подешевле.
Основная проблема выбора товара за свои деньги всем известна: дёшево - плохое качество, дорого - .... ну дорого! А в нашем случае мы ещё и разбить можем. Очень дешёвый квад испортит вам впечатление: потеря видео или управления, вибрации влияющие на картинку, низкая выживаемость после падения, частые ремонты и снова потеря времени на ожидание запчастей. Дорогой квад заставит вас слишком осторожничать, не рисковать, чем замедлит прогресс в обучении. Поэтому в своих постах я давал средние по цене комплектующие. Однако средний по меркам хобби бюджет может для кого-то оказаться не таким уж и средним. Тут я могу предложить рассрочку. Мы сразу покупаем аппаратуру и начинаем учиться летать в симуляторе, а по мере выделения денег покупаем всё необходимое. Так можно, например, провести зимний сезон, растягивая приобретение квада на несколько месяцев. Да и собрать его можно будет аккуратней и более вдумчиво, когда руки не чешутся запустить на улице.
На любые вопросы по теме готов отвечать в телеге.
Показать полностью
FPV Фристайл. Учимся летать. Часть 2
Это серия постов. Предыдущая часть, а в ней и ссылки на всё остальное - тут.
Мне в своё время очень помогало взять в руки что-то напоминающее квадрокоптер и крутить его в руках строго по осям, которыми я управляю. Например, как будет крутиться квад, если мы немного отклоним правый стик по диагонали вправо-назад? То есть вращение будет одновременно по двум осям. Или такой эксперимент: "ролл на 90° по часовой, пич на 90° назад, ролл на 90° против часовой" - будет равно "йо вправо на 90°". То есть оси взаимосвязаны и из одного положения к другому можно прийти разными действиями, и траектории при этому будут отличаться. Для правильных поворотов нам нужно сначала научиться ровно держать горизонт, а потом не боятся его "заваливать".
Для тренировки горизонта (помимо просто полётов) можно делать перевороты на 360° по роллу. Отклоняем стик до упора (скорость поворота при этом будет максимальна для данных настроек) и при приближении ровного горизонта, заранее, возвращаем стик в центр. То есть пытаемся замедлить финальную часть переворота. Фактически она замедляется, но на видео это совсем не заметно, кажется, что пилот быстро и точно остановил квад ровно по горизонту.
Потом к этому можно добавить управления газом: перед переворотом короткий рывок выше среднего, во время переворота в ноль, как только горизонт выставлен - газ висения. В идеале высота почти не меняется.
Дальше можно замедлять переворот: полным газом разгоняем вверх, убираем газ, переворачиваемся медленно и стараемся подхватить квад до земли. Чем медленнее и ближе к земле, тем лучше.
Следующим упражнением будут полёты на нулевом газе, подкинули газом квад, перевернулись на 180° (вверх ногами) и падаем вниз максимально долго, перед землёй подхватываем. Также можно делать на 90°. Цель всего этого - привыкнуть к "кривому" горизонту, собственно полёты "блинчиком" отличают начинающего пилота от опытного.
Для этих упражнений мы используем только газ и ролл. Можно всё это повторить и для пичта, но будет сложнее, так как переворачиваясь по питчу картинка менее информативная, плюс наклон камеры мешает нам точно судить об угле наклона квада, поэтому отнесём такие упражнения к продвинутому уровню. Оставим только перевороты на 360°.
Для "правильного" поворота нам нужно иметь хотя бы среднюю скорость, иначе его тяжело отличить от "неправильного". "Правильный" поворот включает в себя заваливание по роллу, квад описывает дугу в наклоне: по стикам - ролл в сторону поворота и питч чуть назад. "Неправильный" поворот - это ролл и йо одновременно в сторону поворота - это не заваливает горизонт и поэтому комфортнее для начинающего, но стоит увеличить скорость и станет понятно, что квад в повороте летит не туда куда смотрит и для того чтобы попасть в ворота нужно лететь вслепую. Сразу старайтесь наращивать скорость поворота и наклонять квад в нём, иначе вас ждёт осознание ошибки и переучивание.
Все эти упражнения и слова очень мало влияют на то, как точно пилот по картинке понимает, куда движется квад. В первую очередь прогресс генерируют часы налёта, но для систематизации этих часов подойдут упражнения.
И, если мы уверенно летаем Stick Time, можно наконец попробовать полетать на улице, однако забывать про симулятор не стоит ведь мы не для плоской гонки всё это затевали, а для крутых трюков. Дальше текстового повествования даже с картинками будет, на мой взгляд, недостаточно. У Joshua Bardwell есть отличное видео (на англ.) про основные манёвры для начинающего фристайлера. Я попробую оформить к нему русские субтитры, но не уверен, что это получится.
Серия постов официально завершена. На все вопросы я отвечаю в телеге. Следующим постом будет FAQ.
Показать полностью
1

Сможете найти на картинке цифру среди букв?
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi