
Можно и так


Встал утром, прогуляться, а тут такое. Как вариант меня вполне устраивает, складные - они компактнее.
Показать полностью
2
Встал утром, прогуляться, а тут такое. Как вариант меня вполне устраивает, складные - они компактнее.
Аудио смысловой нагрузки не несет, на фоне Philthy Rich - Dope Boy (feat. Rexx Life Raj & ALLBLACK)
Дело было вечером, делать было нечего или дурная голова рукам покоя не дает. Последнее время стал часто кататься на самокате по утрам да по вечерам, и что-то он меня перестал устраивать в плане комфорта и торможения. Речь пойдёт о самокате Oxello Town 9 EF. Кто не знает, это обычный самокат на жестких полиуретановых колесах, хоть и с тормозом (вынесенным на руль) но не эффективным.
И загорелся я идеей внедрить дисковые тормоза. Идея подсмотрена на ВК и доведена до ума.
Фото процесса нет.
Итак, что было сделано.
Переднее и заднее колёса были заменены на надувные (с камерой). Это лучшее что удалось найти из подходящего для этого самоката. Их пришлось немного доработать. Внутрь запрессована втулка чтобы подшипники упирались, колесо стояло по центру оси и осевой люфт был минимальным. Ниппель пришлось дополнительно подогнуть на переднем колесе чтобы не бился о вилку. Все камеры под это колесо имеют только изогнутый ниппель к сожалению.

На авито был найден токарь/фрезеровщик, кто выточил нужные детали по эскизам. Куплены тросик, рубашка, наконечники и пр. мелочи. Тормозной суппорт, ротор и ручка (оказалась левая, не стал пока устанавливать) от самоката Xiaomi. Были попытки запрессовать специальные резьбовые втулки в раму для крепления переходника под суппорт, но за неимением опыта всё установлено на винты с гайками.

По итогу, самокат разумеется стал мягче и тише, тормоза работает явно гораздо лучше чем на оригинальной версии. (Кто не знает, тормоз представлен в виде металлического башмака/колодки, которая при работе изнашивает колесо и сам стирается только в путь, ну и опять же, не работает на мокрой дороге.)
Хорошо и тихо едет как по асфальту (накат за счет надувных колес уменьшился, но для меня не критично).

Вполне неплохо едет по грунтовке, особенно без корней!

Можно брать на вооружение, если кто-то загорится. Что скажете?
P.S.: Знаю что есть рабочие варианты установки мотор-колеса на этот самокат, но по мне это уже перебор.
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.

Электросамокат из гироскутера с учётом прошлых ошибок. Часть 2
Эта часть наверное больше всего вас интересует, постараюсь максимально понятно все объяснить. Как умею.
Итак, для прошивки понадобится:
Купить программатор Stlink v2, оригинальный или китайский без разницы, шьется одинаково.
Скачать и установить с официальных сайтов:
Visual Studio Code (далее вск)
Stm32 Stlink Utility.
В процессе установки стлинк утилиты согласиться на установку драйверов программатора.
Далее открываем Visual Studio Code и устанавливаем дополнения:
Russian Language Pack for Visual Studio Code
Vscode-pdf - понадобится для просмотра файлов пдф
PlatformIO IDE (далее пио).
На начальном этапе этого достаточно, что будет необходимо вск скачает и установит самостоятельно.
Качаем исходник прошивки, он в открытом доступе и бесплатный, https://github.com/EFeru/hoverboard-firmware-hack-FOC . Ссылка вроде не содержит ничего противоправного, прошу прощения, если что не так. Распаковываем.
Там же есть подробное описание от автора прошивки
Берём гирик, разбираем. Должна остаться голая рама с колёсами, АКБ и плата управления с кнопкой включения. Остальное не нужно, вытаскиваем чтоб не мешало. Следует понимать, что после прошивки обратно гириком он уже не станет. Берём паяльник и припаиваем управление согласно схемы. Самокатные курки с датчиками холла можно заменить обычными переменными резисторами на 10 кОм. Подтягивающие резисторы и конденсаторы паяем непосредственно на плату. Если не планируете использовать круиз-контроль то кнопку на него можно не паять.
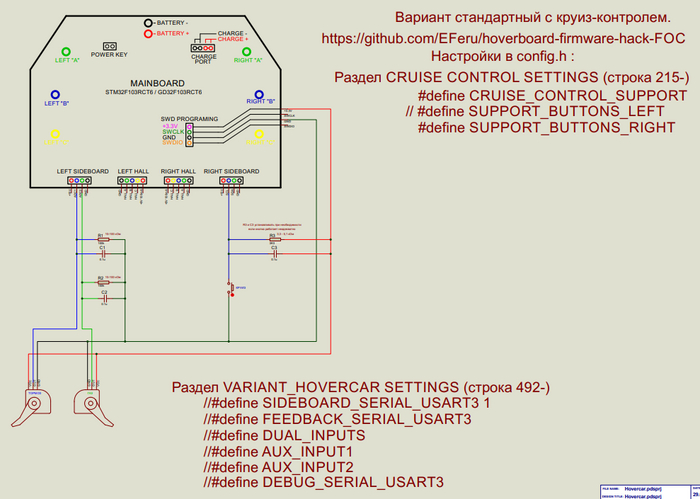
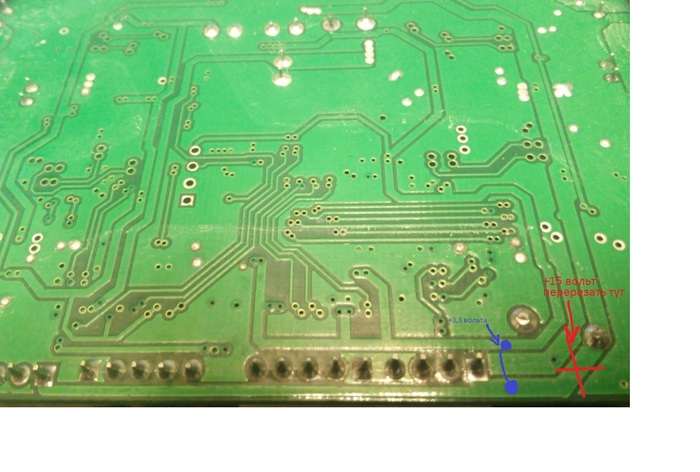
Внимание!!! На разъёмах левого и правого уартов присутствует напряжение 15 вольт! Чтоб случайно не спалить проц неверным подключением рекомендую сразу перерезать дорожку, идущую от стабилизатора 15 вольт на разъёмы. После этого можно подать на разъёмы 3,3 вольта перемычкой. Так будет удобнее подключать курки, можно будет использовать штатные разъемы. Также припаиваем разъём программирования, 4 пина SWD programming рядом с процом. Распиновка платы гирика, полное описание со схемами также есть в исходнике в папке docs.
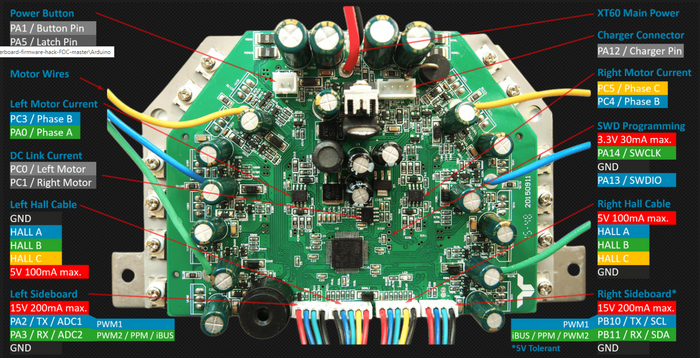
Платы могут отличаться по форме и по маркировке процессора - stm32f103rct6 и gd32f103rct6. Второй - китайский клон стмки, но шьётся и работает также. С другими процессорами прошивка работать не будет.
Спаяли? Отлично, проверьте ещё пару раз, чтоб всё было верно!
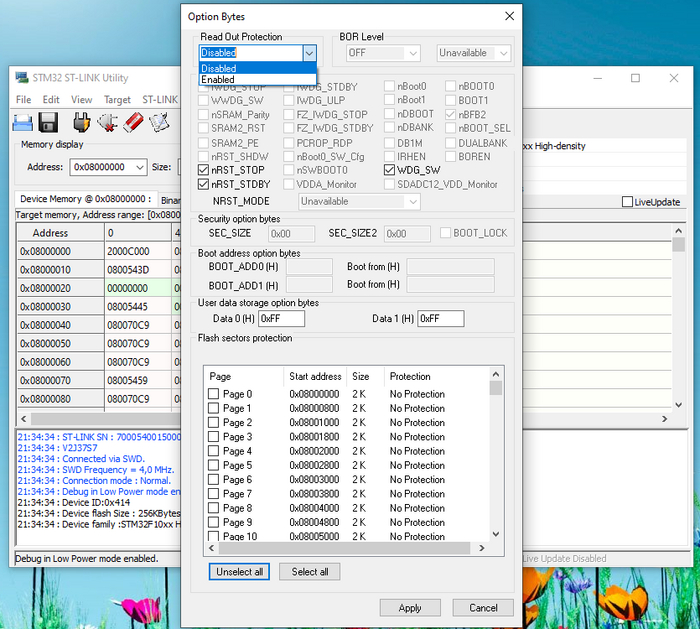
Шьём плату не подключая АКБ. Питание от программатора!!!
Подключаем стлинк, открываем стлинк утилиту, выбираем Connect, после успешного подключения Target - Options Byte и снимаем защиту от чтения, нажимаем Apply... Все, гироскутером эта плата больше не станет, чип стёрт. Жмём Disconnect, закрываем утилиту.
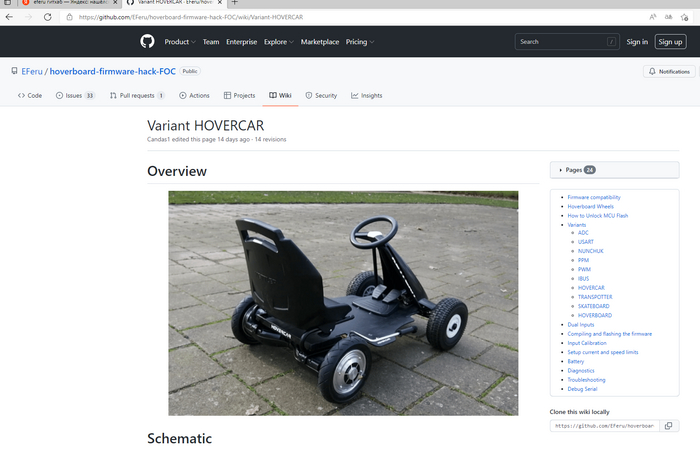
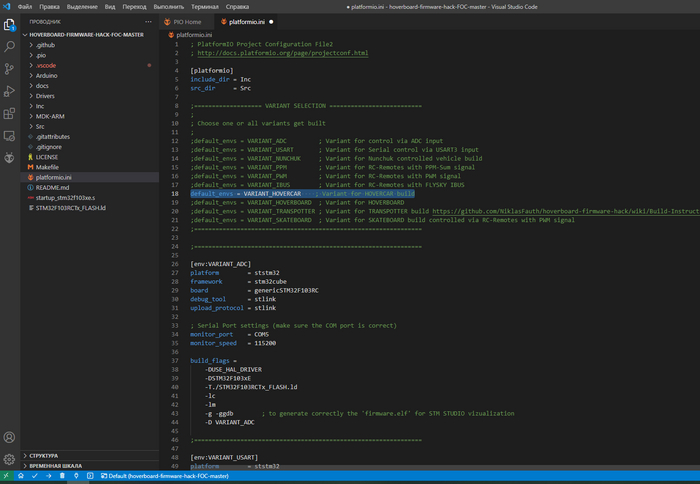
Открываем вск - пио - открыть проект и указываем в папке с исходником файл platformio.ini . В открывшемся файле выбираем нужный вариант прошивки - VARIANT HOVERCAR
Понадобится некоторое время, чтоб программа докачала нужные файлы, после чего в нижнем левом углу появятся кнопки сборки и загрузки

Далее выбираем в папке Inc файл config.h
Я не буду описывать все настройки, которые есть в этом файле, тут и десятка постов не хватит. Опишу только самые необходимые сейчас.
Листаем вниз до раздела MOTOR SETTINGS
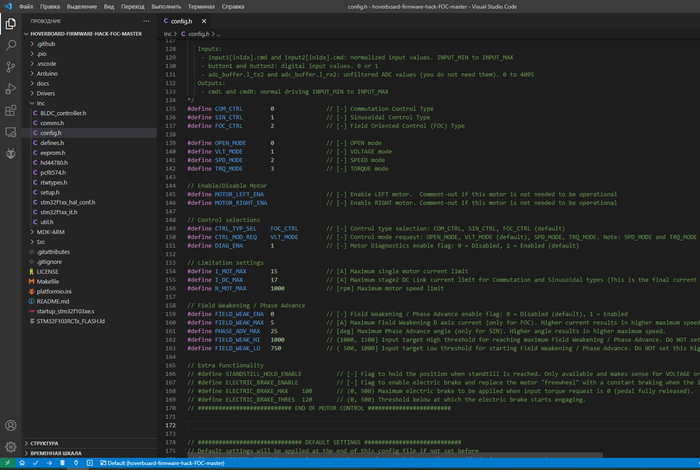
Тут можно включить или выключить мотор и настроить
I_MOT_MAX - максимальный общий ток одного колеса, соответственно на 2 колеса будет х2
I_DC_MAX - максимальный ток фазы, выставляем на 2 ампера больше общего тока
N_MOT_MAX - максимальные обороты колеса, соответственно максимальная скорость.
FIEL WAKE ENABLE - ослабление поля, для любителей погонять. Даёт хороший прирост скорости, но и батарею жрёт. На штатном АКБ гирика включать совсем не рекомендую, она сдохнет, да и токи больше 10 ампер на ней ставить не стоит.
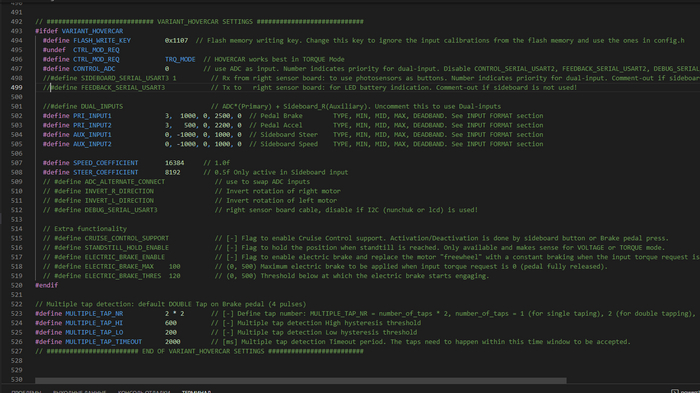
Идём в раздел HOVERCAR SETTINGS
Тут настраивается режим работы моторов TRQ, SPD или VLT_MODE, для самоката лучший вариант TRQ, так как тут присутствует накат.
Неиспользуемые в самокате функции нужно закомментировать:
//#define SIDEBOARD_SERIAL_USART_3
//#define FEEDBACK_SERIAL_USART_3
//#define DUAL_INPUTS
#define AUX_INPUT1 и #define AUX_INPUT2 ставим в значения первую цифру 0, отключено.
#define PRI_INPUT_1 и #define PRI_INPUT_2 ставим в значения первую цифру 3, автоопределение типа ручек газа и тормоза
Тут же можно изменить направление вращения моторов, достаточно раскомментировать #define INVERT_L_DIRECTION или #define INVERT_R_DIRECTION. В принципе, тут все.
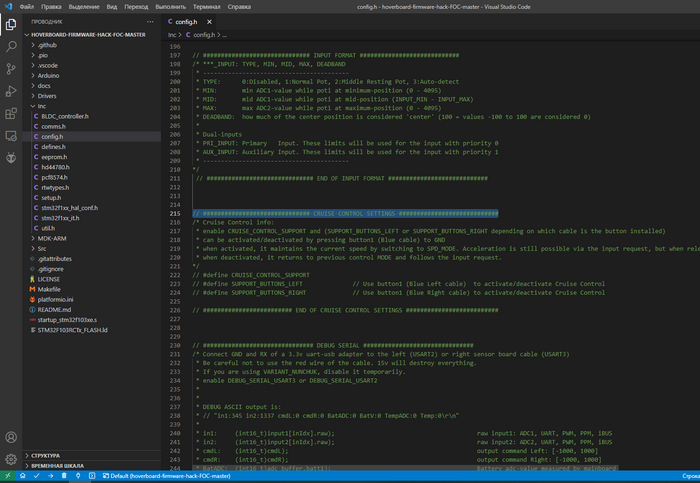
Круиз-контроль включается в разделе CRUISE CONTROL SETTINGS, если используем, раскомментировать строки #define CRUISE CONTROL SUPPORT и #define SUPPORT BUTTONS RIGHT.
Нажимаем в левом нижнем углу галку build, вск скомпилирует прошивку и если всё сделано верно выдаст SUCCESS!
Подключаем программатор, нажимаем стрелку upload. В первый раз нужен интернет, вск будет скачивать нужные для работы с программатором файлы. Потом будет проще.
Перед каждой прошивкой нужно стирать чип полностью, стираем через стлинк утилиту.
После прошивки отсоединяем программатор, подключаем АКБ, ставим ручки газа и тормоза в минимальное положение. Для того, чтоб всё заработало, нужно сделать калибровку ручек, для этого:
кратковременно нажимаем кнопку вкл, сразу после пиликанья мелодии включения нажимаем опять и удерживаем 5-7 секунд, пока плата не пискнет высоким и низким тоном, отпускаем вкл, 3-4 раза дергаем курки от мин до макс и опять кратковременно нажимаем вкл. Калибровка окончена.
Также не всегда моторы запускаются сразу, это связано с тем, что связь сигналов датчиков холла в колесе и фаз обмоток двигателя в родной прошивке гирика и в этой не совпадают. Если после нажатия газа моторы не закрутились и плата начала пищать короткими писками - нужно подобрать верную фазировку, для этого отключаем питание, меняем местами любые 2 силовых провода мотора и пробуем запустить. Потом следующие 2, пока не поедет.
Ещё бывает так, что после нажатия и отпускания газа колёса не останавливаются, а при нажатии на тормоз начинают крутиться взад-вперед. Это нормальное явление, если колёса вывешены. Когда поставите на землю всё будет ок.
Прошивка поддерживает несколько методов управления, самые популярные это курки и PWM и PPM, эти два режима позволяют подключить радиоаппаратуру от RC моделей. Также позволяет управлять с двух входов с выбором приоритета, это полезно для детских машин, когда ребёнок управляет машиной сам, но радиопульт с приоритетом у папы.
Вроде всё рассказал. Если остались вопросы - пишите в комментарии, отвечу всем, может не сразу, но отвечу.
Первая часть тут: Электросамокат из гироскутера, с учётом прошлых ошибок
Итак, всё сварено, покрашено, собираю деку. Размечаю, сверлю, зенкую, нарезаю резьбу под винты. Крышки - алюкобонд 4 мм. Хороший материал, упругий, прочный, лёгкий и легко обрабатывать. В этот раз лицевая сторона чёрная, с обратной стороны белый. Чтоб не попадала влага промазываю низ герметиком, на верх приклеил вспененный двухсторонний скотч.
Самый нужный инструмент)






Установил колеса, разъемы, кнопку включения (в дальнейшем переделал на руль, а сюда поставил ключ-выключатель), протянул провода, поставил АКБ и плату, пустоты в деке заполнил монтажной пеной, она же держит аккумулятор



Собрал руль, поставил курки газа и тормоза, в коробку врезал кнопки круиз-контроля, включения света, включения/отключения самоката и кнопку управления дисплеем




Дисплей выдран из старого принтера, прикручен на кусок поликарбоната, сверху прижимается пластиной из нержавеющей стали, всё с прокладками, герметично. Свет сделал из 4 дхо на 12 вольт, соединённых последовательно. Светит норм, мне хватает.
В магазине сантехники купил трубу канализации ПВХ 110 мм, из нее вырезал полосы и с помощью фена и могучих заклинаний выгнул заготовки крыльев. Зачистил, покрасил. Из нержавеющей проволоки выгнул держатель, чтоб заднее крыло не болталось. Переднее и так крепко держится





Максимальная скорость на АКБ 40 вольт 36 км/ч. Из-за высокого клиренса практически нигде не чертит. Управляемость тоже норм, свободно рулится одной рукой, вобблинга нет.
Мощности за глаза, 2 колеса по 350 вт номинал, в прошивке установил ограничение тока 17 ампер на колесо, они 600 вт легко выдерживают. Амортизаторы не стал делать, у нас везде ровный асфальт, смысла в них особо нет.
Вес чуть меньше 20 кг. По цене самое дорогое тут аккумулятор, с смарт бмс и активным балансиром вышел по старой цене в 10к. Остальное - гирик 1500, курки 2 шт 700, металл 1500, краска 900, и ещё наверно 1000 на метизы и расходники. Итого 5600 плюс АКБ. Для полноприводного самоката это вообще не бюджет.


Из закромов достал звонок велосипедный советский, поставил. Фото к сожалению только такое. Прекрасно звенит

В планах сделать стоп-сигнал и поставить на всякий случай дисковый тормоз на заднее колесо. Хоть электрического тормоза и хватает, но лишним не будет.
Все, закончил. Есть вопросы - задавайте
78 Килограмм чистого зла! Невероятный электро самокат от нашего гостя.
Поверь, такой ты не купишь..
Лучший самокат для дальних путешествий, зарядка за 2 часа на 100км, 6.5 секунд до сотни! И это лишь малая часть того на что способен этот монстр...
Для всех поклонников футбола Hisense подготовил крутой конкурс в соцсетях. Попытайте удачу, чтобы получить классный мерч и технику от глобального партнера чемпионата.
А если не любите полагаться на случай и сразу отправляетесь за техникой Hisense, не прячьте далеко чек. Загрузите на сайт и получите подписку на Wink на 3 месяца в подарок.

Реклама ООО «Горенье БТ», ИНН: 7704722037
Доброго времени суток, пикабушники!
Будет много фото и пара частей.
Всё это безобразие делалось в прошлом году, но руки выложить дошли только сейчас.
Для сторонников покупки готового - это не для меня. Хобби у меня такое, интересно самому собрать, чем идти по простому пути.
Покатавшись на первой версии самоката, Электросамокат, изучив все достоинства и недостатки конструкции, пришёл к выводу, что аппарат получился во многом неудачный и требует доработки.
Поэтому решил построить новый с учётом всех прошлых ошибок.
В первую очередь заказал у китайцев аккумуляторы LiFePO4 32700 6500 мАч, которые по факту оказались 6000 мАч, за что с продавца была содрана неустойка, куплен активный балансир для АКБ и БМС. Собрал батарею


По размерам акб из профильной трубы 50х25х1.5 мм варю деку.


Внутреннюю часть профиля вырезал для уменьшения ширины самоката.
На запчасти купил гироскутер и разобрал. Колёса имеют ось только с одной стороны, исправил так. В оси колеса просверлил отверстие, выточил полуось, запрессовал и обварил. Получилась ось с двух сторон.



Сделал в профиле деки закладные для крепления колеса



Просверлил отверстия, нарезал резьбу, изготовил прижимы, закрепил колесо

Клиренс получился 9 см, этого достаточно, чтобы практически нигде дном не чертить.

Изготовил из трубы закладную под разъем зарядки и кнопки включения и вварил в деку

На разборке была взята бесплатно убитая вилка с амортизаторами. Так как восстанавливать там было нечего, аморты были сняты, вилка укорочена и вварены закладные и удлиненные гайки для крепления колеса

Из ВГП трубы диаметром 40 изготовил труба под подшипник руля, путём разреза вдоль, сжатия до нужного диаметра и заварки. После всё зачищается, запрессовываются обоймы китайского подшипника, вырезается кусок профильной трубы нужного размера и всё это приваривается к деке.


Изготовил руль. Для этого взял кусок профильной трубы, разрезал по углу вдоль, вварил туда вставку шириной 25 мм, заварил торцы и приварил трубы для ручек.

Обрезал и сделал съёмные ручки на резьбе, приварил трубу 32 мм, на другом конце трубы сделал разрез и изготовил хомут для закрепления руля на вилке



Диаметр не совпадает на 3 мм, пришлось изготовить проставку, чтоб плотно зажималось и заодно можно выбирать люфт руля штатным болтом


Просверлил отверстия для проводов. На этом в принципе все по слесарке в общем то готово, зачистка, грунтовка, покраска



Пожалуй, хватит на сегодня, завтра продолжу, сборку электроники и остальное



