

Проклятый снег!
Борьба современных технологий с современной же ифрастуктурой (узкие улочки и неубранный снег).
Борьба современных технологий с современной же ифрастуктурой (узкие улочки и неубранный снег).
Посмотрите, кого я встретил! Иду по Тверской, никогда не трогаю, а мне на встречу робот-курьер. Развозит небольшие грузы, еду, но подниматься в офисе еще не может, так что встречать дорого гостя нужно на улице. В новостях раньше уже видел, а вот лично столкнулся с ним впервые. Думал в снегопады их не выпускают, ан нет, гоняют.
Компания «Яндекс» заключила соглашение с южнокорейской телекоммуникационной компанией KT Corporation, в рамках которого в этом году на территории Сеула будет запущен сервис доставки роботами «Яндекс.Ровер». Об этом говорится в заявлении пресс-службы российской IT-компании.

Таким образом, Южная Корея станет первой страной Восточной Азии, в которой будут курсировать роботы-курьеры «Яндекса». Согласно имеющимся данным, к настоящему моменту роботизированные курьеры «Яндекса» осуществили свыше 85 тыс. доставок товаров в России и США, а в скором времени роверы начнут работать в Дубае.
«Сотрудничество с KT позволит нам расширить географию работы нашей беспилотной доставки и запустить её в новом регионе. Спрос на доставку последней мили (непосредственно заказчику) в Южной Корее один из самых высоких в мире, и он продолжает расти. Роботы позволят автоматизировать этот процесс, обеспечивая надёжный и выгодный способ доставки заказов», — считает руководитель направления беспилотных технологий «Яндекса» Дмитрий Полищук.
В KT Corporation отметили, что сотрудничество с «Яндексом» позволит развить сервис автономной доставки и адаптировать его с учётом условий жизни в Сеуле, а также привычек местного населения. В компании также отметили, что рассчитывают в дальнейшем укрепить партнёрство с «Яндексом» и найти новые направления для сотрудничества. Напомним, компания KT Corporation является одним из крупнейших телеком операторов Южной Кореи, который предоставляет широкий спектр услуг, включая мобильную и фиксированную телефонию, широкополосный доступ в интернет, IPTV и др.
Источник: https://prohoster.info/blog
я понимаю что таксисты без национальности паркуються как хотят , понятно что ваши курьеры гойсают на великах как бог на душу положит но он же управляеться искуственным интелектом . Вроде ничего криминального но коляска не проедет к пандусу по прямой ее надо скатывать на дорогу , отчего не сдать чуток назад или паркануть паралельно?



R2: пришельцы на Земле
R2 задумывался как робот с серийностью до 100 штук, с повышенной прочностью корпуса, увеличенным размером грузового отсека и автоматической крышкой. За его увеличенные, по сравнению с первыми моделями, размеры и округлые формы ребята из эксплуатации прозвали роботов этого поколения «пухляшами». Роботы не обиделись. Наверное. В 2139-м узнаем.

Конструкция
Во время проектирования мы уделили много внимания дизайну. Нам хотелось, чтобы на корпусе не было стыков, поэтому он имеет конструкцию типа монокок и выполнен из стеклопластика. Когда мы отдали этих роботов в производство, подрядчики прокляли нас: человеку нужно было влезать внутрь формы и выкладывать стеклопластик изнутри.

Тестирование объёма грузового отсека на прототипе из 3D-принтера

Алюминиевое основание робота R2
В основании робота — алюминиевая сварная рама. На раму крепятся детали подвески, батарейка, кожухи из листового алюминия, электроника и монокок. На монококе размещаются сенсоры. Сенсоры важно размещать на жёсткой конструкции, которую не тревожат во время ремонтов, потому что их калибруют друг к другу: даже после небольших подвижек вся система потребует перекалибровки. Грузовая корзина целиком вынимается из робота: так практически вся электроника оказывается на виду — это очень удобно для ремонта и обслуживания.
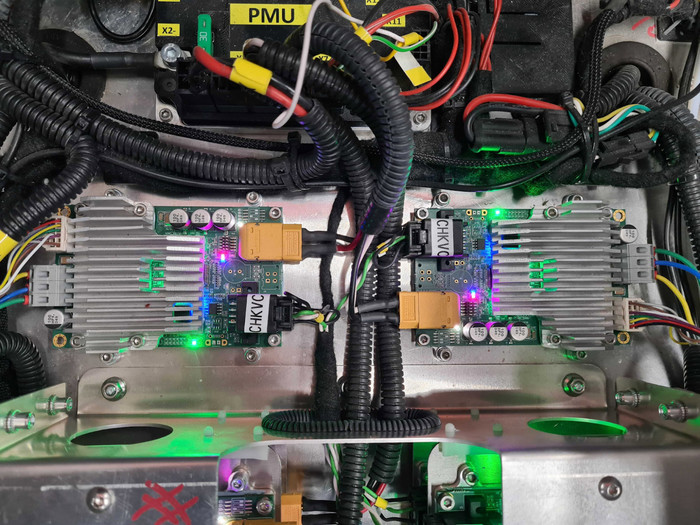
MotorControl и PMU под корзиной робота
Колёса
Для первых поколений роботов мы использовали мотор-колёса от гироскутеров. Которые в один не очень прекрасный момент закончились. Их перестали производить, а мы выгребли все остатки в Москве. Мы пытались выйти на фабрику, которая их производит. Натыкались на партии колёс с совершенно разными характеристиками, хотя при продаже характеристики были указаны одинаковые. У нас была табличка с 10 видами колёс, в которой было описано, как их идентифицировать и насколько они хороши. Дополнительной проблемой оказалось, что на робота нельзя было поставить колёса разного типа справа и слева, или слабые колёса на среднюю ось. В результате операция по замене колеса превращалась в раскладывание пасьянсов.
Кроме этого, колёса, предназначенные для гироскутеров, имели неудобный для нас способ крепления. Чтобы поменять колесо на первой модели робота, нужно было разобрать часть подвески. Ещё в мокрую погоду колёса начали выходить из строя из-за недостаточной влагоизоляции.
По этим причинам мы приняли решение не использовать мотор-колёса в R2, а унести моторы внутрь робота, передавая крутящий момент с помощью системы шкивов и ремней. Было закуплено около десятка моделей моторов разного типа. Мы спроектировали и изготовили несколько прототипов с таким приводом. Испытания показали, что хоть некоторые моторы и могут обеспечить нам езду по ровной поверхности, мы перестаём преодолевать препятствия, разворачиваться на покрытиях с большим коэффициентом трения, а моторы, расположенные внутри корпуса, перегреваются. В итоге пришлось отказаться от этой схемы: более моментные моторы были тяжёлыми, габаритными и дорогими, а варианты с редуктором имели меньшую надёжность, высокую стоимость и уровень шума.

Качалка подвески с ременной трансмиссией
Параллельно мы искали хорошие мотор-колёса, и в итоге вышли на поставщика хороших, стабильных и герметичных, с удобным способом крепления. Мы протестировали новые колёса и сделали выбор в их пользу. А потом оперативно переделали робота под мотор-колёса (мы держали в голове, что такой сценарий возможен и проектировали с его учётом). Этими колёсами пользуемся до сих пор.
Электроника
Специально под R2 мы разработали собственную материнскую плату для вычислителя. На ней разместили Ethernet-роутер, Wi-Fi и LTE-модемы, платы ввода видеопотоков, GNSS-модуль. Таким образом мы избавились от громоздких роутера, GeoHub и коммуникационных модулей, сократили количество межблочных соединений и уменьшили энергопотребление, выиграв ещё три часа работы от батарейки.

Материнская плата вычислителя робота
Сенсоры
Мы перешли на собственные камеры, разработанные ещё для беспилотника. Они обладают всеми необходимыми параметрами: компактные, могут работать в сложных погодных условиях, имеют высокое качество картинки. К тому же сенсор в наших камерах позволяет убрать мигание светодиодов на видео, что важно для правильной детекции сигналов светофора при пересечении дороги. И при этом они обходятся нам дешевле аналогичных камер на рынке.

Камеры SDG
Вместо покупных парктроников мы разработали собственные ультразвуковые сенсоры. Покупные периодически ломались, и будучи для нас чёрным ящиком, не позволяли системно разобраться в проблеме. В итоге у нас получились сенсоры, с которых можно получать не только расстояние до ближайшего предмета (один float), но и целую эхограмму. Теперь у нас появилась возможность посмотреть на данные и настроить пороги срабатывания для разных погодных условий и дорожных покрытий.

Парктроники SDG
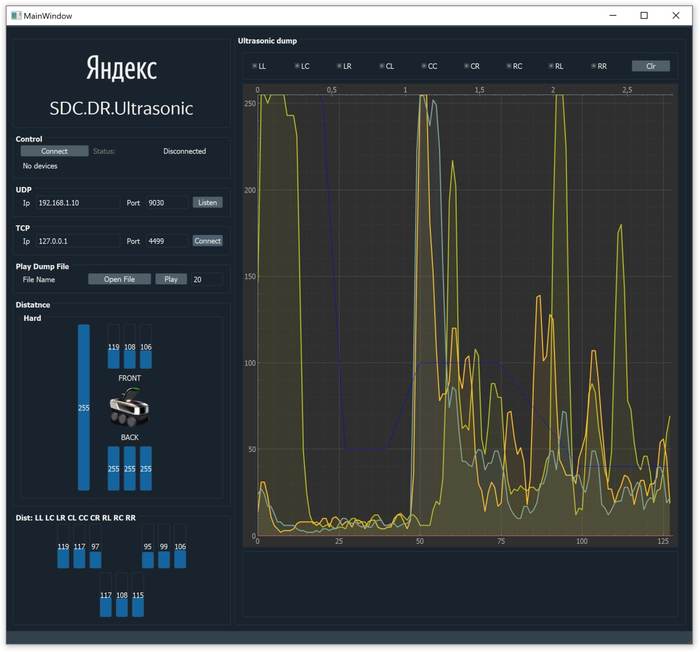
Эходамп с парктроника
Мы добавили ещё один парктроник в переднюю часть робота, чтобы получилась вертикальная стереопара, позволяющая получать больше информации о препятствиях. И два парктроника в заднюю часть, чтобы предупреждать столкновения при движении задним ходом.
Итоги
Роботов модели R2 мы собрали около 100 штук. Сейчас они работают во всех локациях, включая США.

R2 выполняет заказ в США
R3: робот, который всё видит
Основной задачей этого поколения было научиться лучше видеть мелкие предметы перед собой. Кроме того, мы хотели научиться заезжать на высокие бордюры, лучше ездить по бездорожью, снегу, лужам, в разных погодных условиях. Мы также спроектировали батарею, которую можно заменить прямо во время работы робота. Это позволяет уменьшить время простоя робота на зарядке.
Что у робота внутри
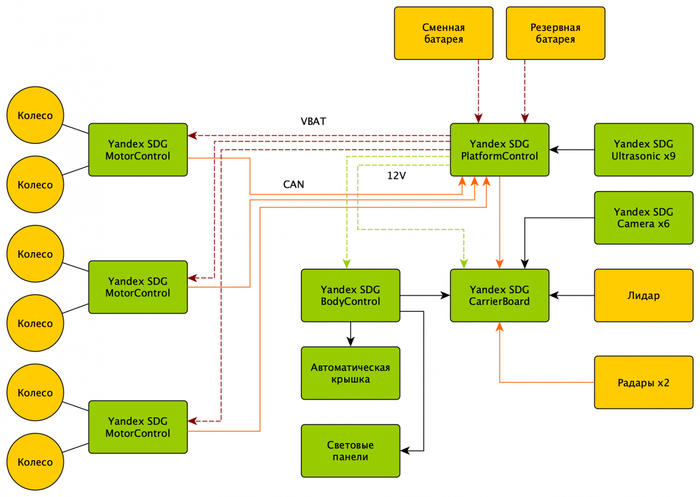
Структурная схема R3. Зелёным цветом показаны компоненты, которые мы разработали сами
Электронная начинка робота состоит из модулей вычислителя (CarrierBoard), контроллера платформы (PlatformControl), контроллера периферии (BodyControl) и трёх контроллеров колёс (MotorControl).
CarrierBoard — это «мозг» робота. С помощью алгоритмов, которые на нём запущены, робот распознаёт людей, машины и препятствия, планирует траекторию движения и локализуется в пространстве. На плате вычислителя расположен роутер, через который все компоненты связаны в единую бортовую сеть. Видеопотоки с камер тоже попадают напрямую в вычислитель.
PlatformControl отвечает за питание платформы, управляет ограничениями токов на каждой ветке питания, переключает питание на резервную батарею, когда основную вынимают. Также он формирует команды управления колёсами и собирает данные с ультразвуковых сенсоров. MotorControl получают от PlatformControl задание скорости для каждого колеса и управляют токами в обмотках так, чтобы обеспечить заданную скорость в разных условиях движения. BodyControl отвечает за управление мотором крышки, замком и бортовым светом.
Все электронные компоненты расположены внутри герметичных корпусов.
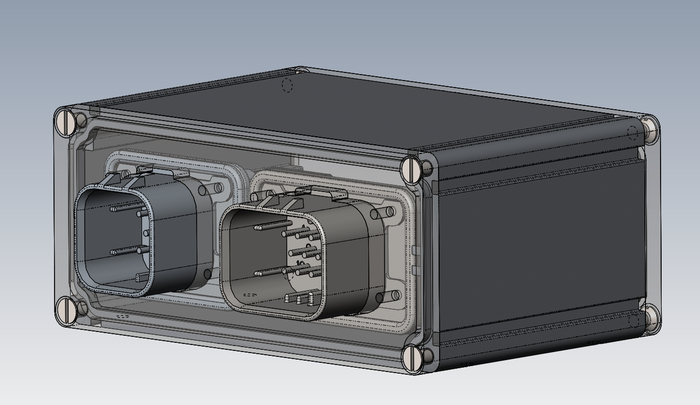
3D-модель MotorControl в герметичном корпусе
Бóльшая часть корпуса робота выполнена из деталей, изготовленных из стеклопластика. Несущей основой робота являются поддон и корзина. На них навешивается всё остальное: подвеска, кронштейны сенсоров и электронных модулей, внешние панели. Доступ к электронике можно получить после съёма соответствующей панели. Сенсоры при этом остаются на грузовой корзине и не требуют перекалибровки после ремонта.
Из-за того, что мы перенесли лидар вперёд, мы не смогли двигаться итеративно и сделать нового робота на таком же шасси, как у предыдущего поколения. Нельзя просто развернуть корпус робота задом наперёд, это потянуло за собой полную перекомпоновку и переработку конструкции. Зато в процессе мы избавились от монококовой конструкции корпуса и от алюминиевой рамы шасси. Это облегчило изготовление деталей и упростило обслуживание робота.

Сборка роботов поколения R3 в нашем инженерном центре
Сенсоры
Мы изменили модель лидара. С момента создания предыдущего поколения команда локализации научилась лучше использовать ориентиры, и мы смогли перейти на лидар, который видит не так далеко, зато имеет более широкий угол зрения и 64 луча вместо 16. Поэтому мы смогли разместить его в передней части робота и слегка наклонить вперёд. Таким образом мы значительно увеличили детализацию окружающих объектов в лидарном облаке.
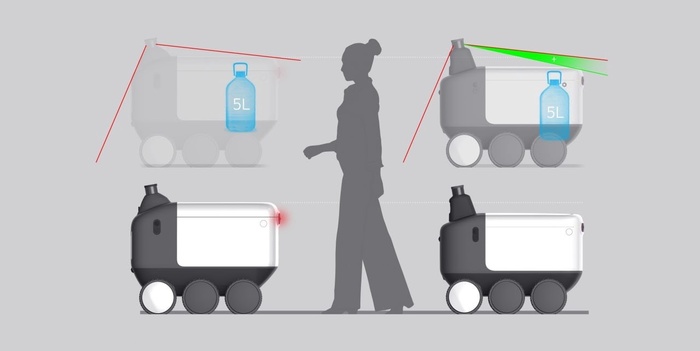
Поиск баланса между высотой отсека и углом обзора лидара
Мы изменили объективы камер, теперь это фишай-линзы с углом зрения больше 180 градусов. В камеру, установленную на роботе, теперь видно кусочек самого робота. Чтобы хорошо видеть светофоры на противоположной стороне широких улиц, мы добавили одну фронтальную камеру с длиннофокусным объективом.
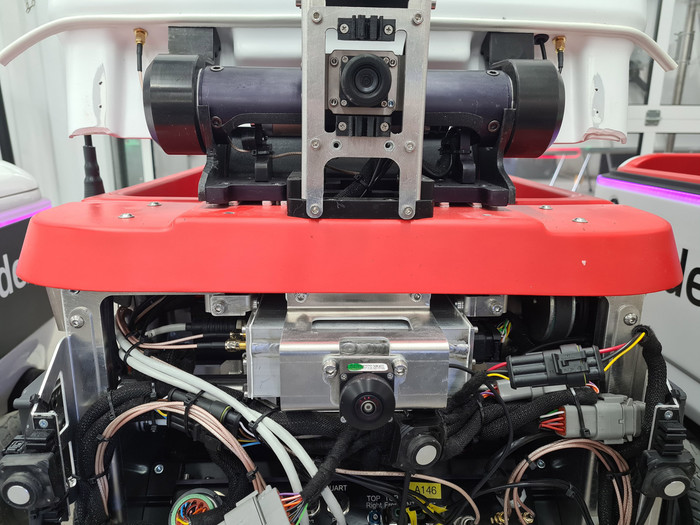
R3, вид спереди. Камеры закреплены на раме робота: так калибровки не страдают, когда панели корпуса снимают для обслуживания
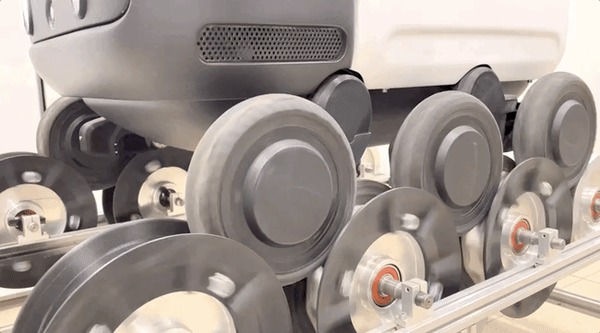
Подвеска
В R3 мы увеличили дорожный просвет и разработали собственную зимнюю резину с более агрессивным протектором и большей площадью контакта с поверхностью. В процессе отбора идей обсуждались и более радикальные решения вопроса зимней проходимости, но было важно соблюсти баланс: всё-таки большую часть времени робот ездит по очищенным тротуарам. Платформа была готова к тестам летом, в самую жару, поэтому для тестов мы использовали ванну с искусственным снегом (полиакрилат натрия). Тесты показали, что R3 лучше справляется со снежной кашей, чем его предшественник. Зиму в этом году снова обещают снежную, а значит, у нас будет отличная возможность протестировать это и в реальных условиях.
R2 не проезжает тестовую ванну со «снегом»:
R3 проезжает тестовую ванну со «снегом»:
R3 едет по снегу в Иннополисе:
Добавила проходимости рессорная подвеска каждой оси. Раньше подвеска была жёсткой, и мы получали высокий уровень шума на трещинах в асфальте, плитке, брусчатке, а особенно при съездах с бордюров. Чтобы протестировать и обкатать новую подвеску, мы спроектировали её прототип для поколения R2 и оборудовали несколько роботов опытными образцами. Роботов испытывали на шейкере, имитирующем езду по неровной дороге, на тестовом полигоне и на самом бугристом из наших продакшн маршрутов.
Так мы убедились, что карбоновые рессоры выдерживают нагрузку и нашли несколько недочётов, которые удалось исправить до запуска этой подвески на R3.
Вот как робот переезжает тестовое препятствие (скоростная съёмка на айфон):
Крышка
В этой версии робота мы переработали механизм закрытия крышки. Мы сделали его более надёжным, интегрировав петлю прямо в крышку (раньше она крепилась к корпусу кронштейнами). Также мы изменили тип двигателя. Это позволяет нам чувствовать намерение пользователя захлопнуть крышку рукой и реагировать на это штатным закрытием. Крышка также чувствует, если под неё попал посторонний предмет, и открывается обратно, как лифт. Её можно закрыть кнопкой, руками или из приложения:
Итоги
Суммарно три поколения роботов уже доставили 60 тысяч заказов. Сборка третьего поколения идёт полным ходом — каждый день появляются новые R3. Например, робот номер 126 штурмует сугробы Иннополиса.

А его товарищ номер 127 в это время любуется на кактусы и пальмы Аризоны. В Москве с R3 можно познакомиться в Хамовниках.

Будут ли новые итерации роботов? Вполне возможно. Мы постоянно анализируем удобство нашего сервиса рободоставки для пользователей и смотрим, что можно улучшить по части железа. Софт постоянно совершенствуется, и каким-то новым фичам может потребоваться хардварная поддержка. С выходом третьего поколения работа не заканчивается, а только начинается.

В Москве люди развлекают роботов.

Вот какой "Луноход" повстречал сегодня в районе метро "Цветной бульвар". Яндекс представил робота-доставщика ещё в конце 2019 года. Выглядит серьёзно: три пары колес корпус на вид крепкий. Говорят, что такой аппарат возит продукты из Яндекс.Лавки в районе Малой Дмитровки. По идее, у машины должен быть лидар, чтобы строить карту окружающего пространства и обнаруживать препятствия. Тем не менее, сегодня ровером управлял оператор, с помощью джойстика. Может, отладка, а может, испытания. Ехало чудо техники довольно небыстро, медленнее, чем идущий пешеход.







