

Романцевские горы. Тульская область. Май 2022
Снято на GoPro 7 на FPV квадрокоптере
Снято на GoPro 7 на FPV квадрокоптере
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
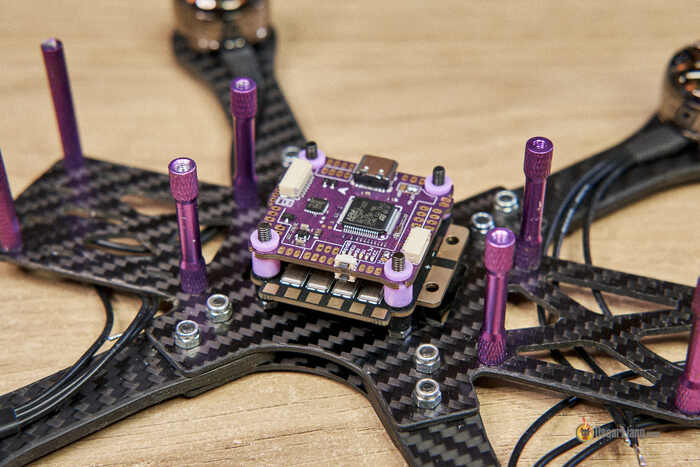
5. Моторы.Регулятор - схема, которая заставляет вращаться бесщёточный трёхфазный мотор (как раз тот, что используется в дроне). Принцип работы мотора мы рассматривать не будем, замечу лишь то, что для вращения такого мотора требуется быстро и согласованно менять ток в трёх контурах. Просто подать напряжение и радоваться, как это делается с щёточным мотором - не получится. С одной стороны к регулятору подключён мотор тремя фазами, с другой - пара проводов питания прямиком от батареи и пара - управления, с полётного контроллера. По этим проводам идёт управляющий сигнал и его формат должен "понимать" регулятор.
Не углубляясь сильно в теорию и историю, скажу, что протокол Dshot600 сейчас максимально широко поддерживается как современными полётниками, так и регуляторами. Если 4 подобные схемы объединить в одну плату по-крупнее, то получится современный регулятор 4-в-1. Компактность, уменьшение веса и простота подключения в плюсах у такого решения, замена всего устройства после выхода из строя одного регулятора - в минусах. Регуляторы характеризуются: 1. форм-фактором, 2. номинальным током 3. максимальным напряжением 4. поддерживаемой прошивкой.
Об этом подробнее:
1. Форм-фактор. Помимо отдельного регулятора и устройства 4-в-1, последние отличаются размерами. Стандартно в любой раме на нижней пластине будут 4 отверстия расположенные по углам квадрата со стороной в 30мм. В эти отверстия мы воткнём длинные винты (на картинке чёрные):

И сверху нанизаем регулятор и полётный контроллер:
Так вот, помимо 30x30 есть стандарт 20x20 (как регуляторов так и полётников) и есть 5 дюймовые рамы, которые предлагают отверстия 20x20 в дополнение к 30x30. Мы этот стандарт использовать не будем, так как надёжный регулятор на достаточный ток в формате 20x20 найти тяжело, а раз регулятор у нас 30x30, то и полётник придётся использовать такого же размера, просто исходя из нашей ситуации с винтами.
2. Номинальный ток. Тут классическая ситуация с китайскими амперами, чем дешевле регулятор тем меньше китайский ампер соответствует международному эталону. То есть 30А брендовых могут не сгореть там, где исдохли 50А по-дешману. Надеюсь информация не шокирует. В общем-то нужный нам диапазон я назвал 30 - 50 ампер. Маркируются отдельные и 4-в-1 одинаково: по номинальному току через один регулятор.
И ещё замечание: квад не будет мощнее, если поставить регулятор на 100 ампер. Регулятор должен выдерживать ток,который запрашивает мотор и отдаёт батарея.
3. Максимальное напряжение. Регулятор может поддерживать либо напряжение до 4S, либо до 6S. Конкретное значение в вольтах никто не пишет, просто совместимость с батареей. Мало того, если мы поставим регулятор на 6S, то он прекрасно будет работать c батареей 4S и у нас будет даже запас по рассеиваемой мощности. Наоборот - ESC на 4S с батареей 6S - нельзя, выпустим волшебный дымок.
4. Прошивка. Для вращения мотора, как уже было сказано, нужно быстро и согласованно менять ток в обмотках, также, пока ток течёт через две фазы, третья может померить наводящийся ток и с этими данными можно что-то сделать полезное. Короче, в каждом регуляторе есть микроконтроллер, а каждый микроконтроллер работает по программе, которая называется прошивкой. Так вот регуляторов грубо говоря два типа: работающие на контроллере поддерживающем прошивку BLHeli_S или - прошивку BLHeli_32. Прошивки развиваются, имеют свой ПК (Windows/Linux/MacOS) софт для перепрошивки и настройки различных параметров и я очень надеюсь, что к моменту, когда мы дойдём до настройки собранного квада, выйдет наконец релиз Betaflight 4.3 (тоже прошивка но к полётному контроллеру), где необходимость лезть в настройки прошивки регулятора будет упразднена. Разница между прошивками в том, что BLHeli_32 работает на более мощных 32-битных контроллерах и имеет лучший потенциал в развитии, однако BLHeli_S переживает сейчас возрождение вместе с маленькими комнатными квадами, и её развитие тоже слабым назвать нельзя, вышло даже несколько альтернативных прошивок с доп. функциями. Мы же остановимся на BLHeli_32 как наиболее функциональной.
На борту типичного 4-в-1 ESC есть вход для батареи, измеритель тока для подсчёта потраченных мАч батареей, преобразователь напряжения на 5В для питания полётного контроллера, ёмкости (конденсаторы) для фильтрации пиков тока\напряжения в линии питания, что сильно влияет на качество видео.
Дорогой ESC может отличаться от дешёвого:
1. Качеством компонентов и пайки.
2. Соответствием заявленным параметрам.
3. Комплектацией. Может быть несколько шлейфов: для стандартной распиновки полётника и для сборки своего шлейфа или вариант для пайки без использования разъёма. В комплекте могут быть провода большого сечения и разъём XT60 под батарейный вход. Также в комплекте может быть отдельный фильтрующий конденсатор.
5. Наличием защиты от переполюсовки. С одной стороны, когда всё правильно собрано, перепутать плюс и минус физически невозможно, с другой - когда вместо квада на асфальте дымящийся фарш, возможно защита спасла нам хоть какой-то компонент.
4. Количеством конденсаторов распаянных непосредственно на плате, то есть качеством фильтрации и нужде в отдельном конденсаторе.
Если затрахал с конденсаторами, то лучше всегда ставить то, что есть в комплекте, и докупать, если в комплекте нет - хуже не будет.
Я был большим поклонником отдельных дешёвых ESC и конечно, несколько сгорело, но собирать мы будем с 4-в-1. Эталоном в мире ESC давно считается Hobbywing XRotor Micro 60A. Фирмы IFlight, Diatone. Spedix, Foxeer делают вполне надёжные регуляторы разных форматов.
Цены я пока воздержусь указывать так как курс на али 70, а в приложении моего банка 58.
Следующая серия - полётный контроллер.
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
У моторов два параметра: размер и KV.
Размер обозначается четырёхзначным числом, например 2206. Значит диаметр мотора 22мм а высота 6мм. Параметр KV - это некая магнитная характеристика, но близко к ней находится параметр "обороты на вольт". То есть мотор с 2500KV даёт примерно прирост 2500 оборотов при увеличении напряжения на один вольт. "Погоди, какой нахрен вольт, мы же переключаем фазы как бешеные, чтоб оно крутилось! Если их не переключать никаких оборотов не будет!" - воскликнет читатель и будет прав. Но оценить мотор по этому фэйк-параметру возможно.
В тонкости нам сейчас лезть не нужно, по этим параметрам мы подбирать ничего не будем, нам просто нужен типичный мотор на пятидюймовый дрон.
Каждая модель мотора имеет 2 - 3 варианта по KV, например IFlight Xing-E размера 2207:

продаётся в вариантах 1800KV, 2450KV и 2750KV, нам нужно знать, лишь то, что KV ниже 2000 не подойдут под 4S батарею, а остальные 2 варианта годятся. Это не значит, что нужно брать максимум. Если кратко, то чем выше KV при тех же оборотах , тем ниже крутящий момент. Но на тягу при одинаковом крутящем моменте влияет пропеллер. Там сложные отношения, а нам нужно оказаться просто внутри коридора параметров, купив типичный мотор.
За подробностями добро пожаловать в телегу ch347, сейчас перегружать информацией не стану.
Дорогие моторы от дешёвых могут отличаться:
1. Лучшим качеством подшипников и материалов.
2. Наличием в комплекте сразу нескольких вариантов длин винтов (длина винта критически важна, это обсудим на этапе сборки)
3. Эффективностью "тяга на ватт" (при оптимальном пропеллере!).
4. Дизайном, лучше обеспечивающим охлаждение.
5. Легче, при той же эффективности или прочности.
Динамика нашего будущего квада зависит не только от моторов (хотя зависит во многом), не меньший вклад внесут итоговая масса дрона и пропеллер.
Дешёвый вариант моторов - это серия Samguk от компании DYS, которая сейчас называется FlashHobby, серия делится на подсерии Shu, Wei и Wu, любые размеры годятся, KV ниже 2000 - нет. Ещё эта серия хороша тем, что производится сто лет и можно докупать мотор по мере ушатывания. Разумно, чтобы не ждать, взять пять и при потере бойца, ставить пятый и сразу докупать. Но это сценарий для отчаянных пилотов, которые нацелены на дестрой.
Из заслуженных, помимо упомянутого Xing-E, это Emax ECO II 2306 и T-motor F40 Pro IV (да любой T-motor), хотя в продаже годных моторов гораздо больше. Не очень хорошими будут старые модели, но как их отличить? Раньше была мода делать моторы для правого и левого вращения (а на дроне два мотора будут отличаться направлением вращения) разными. Пропеллер надевается на вал мотора и притягивается гайкой, и резьбу делали как левую, так и правую и гайки в комплекте шли разные. Сейчас так делать перестали, так вот, разные варианты мотора (CW и CCW) - признак залежалого товара, брать его можно только если это качественный товар с хорошей скидкой, но новичок этого не знает.
Кстати, квад с четырьмя абсолютно разными моторами и четырьмя разными пропами на них будет вполне летать в темпе самой слабой пары "мотор-проп", так как регулировка полёта происходит по фактическому положению квада в пространстве. Можно ещё четыре разных регулятора добавить... звучит как челендж. Пишите в коментах, если хотите, чтобы я всерьёз подумал над постройкой квада у которого все 4 мотора, все 4 регулятора и все 4 пропеллера будут разные. "Франкенштейн" банально, назовём - Арлекин, как фольксваген когда-то (кто не знает, гуглить картинки "polo harlekin").
Ранее в этой серии:
1. Начало.
2. Аппаратура.
3. Дрон.В этом выпуске картинки!
Рама держит все составляющие вместе, даёт жёсткость и защищает электронику от ударов. Обычно рама представляет собой фрезерованные детали из листа карбона, стойки и винты крепления. Для наших целей подойдёт почти любая 5 дюймовая рама не ориентированная на гонки. Размер иногда указывают в миллиметрах - это расстояние по диагонали между центрами моторов (точнее мест под них), нас устраивает размер 210 - 250мм.
Внешний вид типичной фристайл рамы:

Внешний вид типичной гоночной рамы:

То есть нам понадобится чуть больше места в центральной части, чтобы удобно расположить все компоненты. На лучи прикручиваем моторы, на моторы - пропы, внутри впереди камера, в центре стопкой полётный контроллер и регулятор 4-в-1 (либо отдельные регуляторы на лучи), сзади видеопередатчик и антенна чтобы торчала хвостом; и где-то там приёмник с антенной закреплённой согласно религиозной конфессии автора. На крыше аккумулятор, также на крыше спереди будет место под записывающую камеру, если захотим её поставить.
Получится что-то типа этого:

Есть рамы с отдельными 4 лучами, есть с цельной нижней пластиной, нам это неважно. Можно подумать, что раму с отдельными лучами починить (в случае поломки луча) будет проще и дешевле, докупив луч, но нужно ещё найти в продаже этот луч, да ещё и тогда, когда нам это станет нужно, ну или сразу купить запасной.
Можно покупать практически любую раму на али, которая похожа на картинку фристайл-рамы выше, цена таких рам 2 - 5 т.р. они вполне годятся для наших целей. Удачный дизайн рамы от хорошей компании достаточно просто скопировать, чем китайцы и занимаются, попутно экономя на качестве карбона и металла винтов и стоек, но всё равно, самый дешёвый китайский карбон крепче чем квад DJI FPV. Слепить раму по дендрофекальной технологии не выйдет, помимо низкого веса и прочности, нужна жёсткость, так как 4 мотора дают очень серьёзный спектр вибраций и есть риск с резонансом борьбу проиграть (рама либо развалится в воздухе, либо раскрутятся винты).
Если же вы собираете HD вариант, то есть с видеооборудованием DJI, то и рама должна быть подходящая, видеопередатчик достаточно крупный и может не поместиться. Обычно возможность установки DJI-видео указана в описание рамы, на взгляд определить тяжело.
Конечно рам огромное множество и цена может доходить до 100$ и более, но прочувствовать за что такие деньги вы сможете лишь с опытом. Лакшери считаются рамы Armattan, но и у них есть минусы (помимо отсутствующей доставки в Россию и оплаты только PayPal). Среди китайцев хорошими считаются рамы фирм Diatone, IFlight и GepRC. Рама определит максимальный размер курсовой камеры, которую мы сможем поставить - этот момент обсудим вместе с камерами.
Дорогие рамы от дешёвых могут отличаться:
1. Богатым комплектом: несколько комплектов винтов и проставок под полётник и под моторы, защитные пластиковые элементы или детали для удобного размещения наиболее распространённых компонентов типа видеопередатчиков и приёмников TBS, лямка для батареи, мягкая нескользящая прокладочка под батарею (нужная вещь, но есть лайфхак);
2. Более качественным карбоном, снятыми фасками с деталей, "правильной" ориентацией детали на листе карбона.
3. Наличием настроек, типа угла записывающей камеры, или возможности собрать "заниженный" вариант. Также могут быть в продаже сменные лучи для варианта в 6 - 7 дюймов.
4. Большим соотношением прочность к массе.
Всё это, повторюсь, новичку значения не имеет.
Из эконом-класса подойдёт рама из поиска али по фразам "readytosky x220", "frame Martian II" или "frame Martian IV" , из среднего класса Diatone Roma F5, GepRC Mark4 и Mark5 и IFlight XL5.
В следующей серии - моторы!
Один длинный плавный полёт. Таким это место почти никто не видел.
Специально для тех, кто любит FPV-полёты поспокойнее. :)
И немного предыстории.
Здесь раньше проходил знаменитый фестиваль КаZантип. После переходе Крыма в состав России площадка перестала соответствовать требованиям безопасности и проект закрыли. По крайней мере, такую версию я знаю. Теперь здесь Z.City и в сезон проводятся более скромные мероприятия. Зато появились новые инсталляции, но старые по-прежнему находятся здесь.
Видео снимал прошлой зимой в довольно сильный мороз. На следующий день снег растаял...
У кого есть инста, там тоже много интересного)
Ранее в этой серии:
1. Начало.
2. Аппаратура.
Дрон - он же квадрокоптер. Мы ограничимся "стандартным" 5 дюймовым дроном, весь остальной спектр размеров существует и занимает свои ниши, но "5 дюймов" - это база, наиболее манёвренный и универсальный аппарат.
Мы его будем собирать самостоятельно, из отдельных деталей доступных на китайском рынке (читай - али). Детали эти созданы исключительно для квадрокоптерных целей, то есть существует индустрия хобби. Если купить сразу собранный квадрокоптер этого класса, то он ничем принципиально от нашего отличаться не будет. Есть даже вероятность купить все составляющие и собрать прям точно такой же по конфигурации.
Из чего состоит fpv квадрокоптер?
1. Карбоновая рама (frame).
2. Четыре одинаковых мотора.
3. Четыре регулятора оборотов для моторов (ESC), объединённые на одной плате (4-in-1) или отдельно в виде четырёх одинаковых плат (теряет популярность).
4. Полётный контроллер (flight controller, FC).
5. Приёмник с антенной, совместимый с нашей аппой.
6. Курсовая камера.
7. Видеопередатчик (VTX) с антенной, совместимый с нашим видеоприёмником в очках.
8. Аккумулятор, совместимый по напряжению с регуляторами и моторами.
9. Четыре пропеллера нужного размера двух видов вращения (обычно продаются комплектами).
10. Лямка для крепления аккумулятора, провода и разъёмы, винты, гайки, изолента, термоусадка, пластиковые защитные детали (обычно 3D печать), крепление для гоупро и прочее. Что-то из этого может идти в комплекте с каким-то компонентом, но рассчитывать на это не стоит, тем более почти никто не указывает полный комплект.
По каждому из пунктов выше планируется пост, так что история не быстрая.
Отдельным постом, скорей всего, будет пайка. Скилл, который необходим для самостоятельной сборки и который гораздо проще освоить, чем, например, управление fpv дроном в акро режиме. Навык пайки обычно приобретается вынужденно, для какой-то более общей задачи, так вот у нас этой задачей будет освоение fpv. Если вы всё-таки позаритесь купить готовый дрон, то рано или поздно вам придётся его чинить. Без пайки, вам придётся искать мастера за деньги и время. Само собой на паяльник и все приблуды к нему тоже нужны деньги, но это траты несопоставимые с дроном. Плюс я сам занимался ручной пайкой профессионально (можно же так сказать, если профессия предполагала пайку весь рабочий день?), и смогу перечислить компоненты необходимые и достаточные для надёжной пайки в нашем деле. Ну и гайдов по пайке в сети не в пример больше чем по fpv.
Но вернёмся к дрону.
По совместимостям, есть три группы компонентов, которые должны быть совместимы друг с другом внутри группы:1. Приёмник <-> аппа; по части радиопротокола. Мы выбираем ExpressLRS, обоснование смотри в посте Аппаратура.
2. Камера <-> видеопередатчик <-> видеоприёмник <-> очки; по части стандарта изображения. Мы выбираем аналоговый сигнал. Это дешевле, большое разнообразие компонентов, непревзойдённо малая задержка сигнала, картинка среднего качества. Отдельно рассмотрим цифровой стандарт с оборудованием DJI, это дороже, но изображение на порядок качественнее.
3. Моторы <-> регуляторы <-> аккумулятор; по части номинального напряжения. Мы выбираем 4S (четыре последовательных LiPo элемента). Дешевле, разница в динамике с 6S незначительна, достаточно распространён.
Отдельно упомяну DJI FPV Combo, это готовый набор fpv дрона от DJI. С ним не совместимо ничего из выбранного нами, однако в комплекте есть всё необходимое. Это Apple в мире дронов: ремонтировать самостоятельно его сложно, где брать запчасти я не знаю, официальный ремонт существует, но, скорей всего, по соответствующей цене. Есть киллер-фича: кнопка тормоза - дрон с любого положения и направления мгновенно останавливается и выравнивается в воздухе - аналогов этой функции пока нет больше нигде. Картинка - божественная по качеству, но с переменной задержкой, некоторые этого не переносят. Но самый большой его минус - это хрупкость, дрон пластиковый и сломать при падении его очень легко. То есть мы имеем сочетание низкой прочности и высокой цены - крайне не рекомендую для новичка.
Вообще столкновения и продолжение полёта после них - ключевая часть фристайла, все эти умопомрачительные видео сделаны не с первого и, часто, не с десятого дубля, однако между дублями дрон ударялся и выживал. То есть крепкой карбоновой рамой мы задаём некий предел "безбашенности" с которым позволяем себе летать, ушатав дрон выше этого предела мы что-то сломаем, но ниже - у нас есть приличный запас прочности на риск и эксперименты. DJI FPV имеет нулевой запас, с ним безбашенных видео гораздо меньше и они в комьюнити вызывают особый восторг, так как даже отодвинув вопрос денег, не 20 дронов же приносить на площадку, чтобы делать те самые дубли.
По итогу у нас будет фристайл дрон, который по своим возможностям, в сравнении с другими размерами и классами, будет максимально манёвренным, с запасом мощности на долгие годы и интересным в управлении, практически не отличаясь от дронов с которых записывают хайповые видео. И нас, знающих устройство дрона, имеющих все навыки и инструменты для его починки, от исполнения полётов подобного уровня будет отделять только наше мастерство как пилота.
Наверное, непосредственно про пилотирование тоже смогу набрать информации на посты, но пока надеюсь осилить описание постройки квада. Напомню, что индивидуально на все вопросы постараюсь ответить в телеге - ch347.
Привет!
Честно: пишу с надеждой получить какой-либо буст своей пустой группы ВК.
Полётами на FPV-дронах начал увлекаться осенью прошлого года.
К сожалению, первая экшн-камера оказалась неподходящей для синематик-видео.
Лишь сейчас, когда я приобрёл GoPro, начал потихоньку лить контент в интернет.
Если кому интересен путь в FPV от нуба-новичка, который изначально летал на Dji Mini 2 (фе) - могу в череде постов расписать в подробностях.
А группа моя - воть.
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi
Ок, продолжаем.
Отклик бешеный по результатам предыдущего поста, это радует. Немного объяснюсь. Собрать дрон дело довольно простое, в том плане, что не нужно ничего тренировать и получать специальных знаний. Однако во-первых, разнообразие компонентов очень широкое, во-вторых, каждый компонент имеет несколько параметров, смысл которых нужно (как минимум хочется) понимать, в-третьих, информация о совместимости часто неочевидна (типа на 5-дюймовую раму подходят 5-дюймовые пропы, вы видите логику в этом?), в-четвёртых вечная проблема брать дёшево или качественно, которая на самом деле сложнее: есть провальные продукты, есть просто дешёвые и качественные вещи. В-пятых, неизвестно какой из человека получится пилот, если он расколотит сразу раму или мотор, то только рад будет, что изначально выбрал дешёвые. Если летает бережно, то может задаться вопросом, "а нахрена я скупился на нормальное железо?", сейчас менять рабочее на рабочее не хочется, а невысокое качество заметно. Или человек купил по-минимуму - не зашло, продать теперь тяжелее.
Очень, очень много решений, которые могут быть пилотом пересмотрены в будущем: с опытом, с деньгами, с энтузиазмом. А пока эти решения должен принять за них я. И я готов взять на себя эту ответственность, но и пилот должен понимать, что мы, скорее всего, строим не его идеал.
В сети много видео полного сбора квада с нуля, но новичок не знает, как заменить компоненты указанные в видео. А их придётся заменить, потому что конкретных компонентов из видео нет в наличии. Ну и в таких видео обычно не затрагивают аппаратуру и очки, а без них не полетать fpv. Эта одна крайность: собирай только так. Вторая крайность - это сайт, в котором в целом есть вся необходимая информация, но набор необходимых и достаточных статей остаётся загадкой.
Золотой же серединой, на мой взгляд, будет менее строгий гайд по сборке, с указанием нескольких вариантов компонентов или подходящих параметров, плюс ответы на вопросы индивидуально в телеге (ch347), не столько чтобы отклонится от гайда, сколько ответить на вопросы, которые я просто забыл упомянуть в статьях.
К практической части. Аппаратура.
Предположим наш теоретически идеальный читатель определился с аппаратурой, заказал её и ждёт. Посмотрим, что же из себя представляет аппаратура.
На готовом дроне будет два радиоканала: управления (контроль) и видео. Радиоканал управления состоит и приёмника (receiver, rx) и передатчика (transmitter, tx), что неудивительно, однако в современных системах помимо сигнала управления с передатчика на дрон, ещё приходит сигнал с дрона на передатчик - телеметрия, то есть параметры дрона приходят пилоту и дальше мы можем эти параметры как-то отображать или даже реагировать на какие-то условия. Таким образом, наши приёмник и передатчик становятся приёмо-передатчиком (transceiver). Однако исторически аппаратуру мы зовём передатчиком, в дрон же идёт приёмник.
Чтобы всё работало, нужно чтобы и аппа и приёмник говорили на одном языке - радиопротоколе. Ещё недавно можно было развести широкие дебаты о радиопротоколах, сегодня же у нас есть ExpressLRS (ERLS) - открытый набор стандартов радиосообщения. Мало того, буквально в последние месяцы выходят аппаратуры, которые внутри имеют радиомодуль этого стандарта и именно такую аппаратуру я рекомендую, это, повторюсь: Radiomaster TX16S MK2 ERLS, Radiomaster Zorro ERLS и BetaFPV LiteRadio 3 Pro ERLS.
Как это работает?
Аппаратура берёт состояние стиков и тумблеров добавляет метку, отсылает в виде радиоволн в пространство, приёмник увидев свою метку, расшифровывает данные и передаёт их в полётный контроллер, который управляет моторами и доп. оборудованием на дроне, согласно нашим командам. Благодаря цифровому протоколу, одновременно в воздухе может находиться под радиоуправлением несколько сотен летательных аппаратов. Видео - разговор отдельный.
Что за Mode 2 и какая разница?
Иногда при выборе вариантов аппаратуры в магазине есть параметр: Mode 2 или Mode 1
Квад в акро режиме управляется вращением по трём осям: тангаж (pitch), крен (roll), рысканье (yaw), плюc газ (throttle). Я хз какую мне использовать терминологию, но в комьюнити говорят "пич", "ролл" и "йо" ("ё?" или даже слышал "яв"). Так вот, соответствие стиков осям - это и есть Mode. Mode 2 самый популярный, расклад такой: левый стик вертикальный ход - газ (для газа нам не нужен возврат в центр стика, поэтому аппа с другим Mode отличается физически, но обычно может быть переделана), горизонтальный ход - йо; правый стик вертикаль - питч, горизонталь - ролл. Если вам неудобно, привыкайте, все гайды, дефолтные параметры прошивок и прочее ориентировано на Mode 2.
Зачем столько тумблеров?
Для управления квадом достаточно четырёх каналов (независимых параметров) - это наши стики. Но удобно хотя бы ещё один канал поставить на вкл\выкл (arming, "взведение" или просто арм) - это тумблер, причём тумблер двух-позиционный. На аппе же могут встречаться ещё трёх-позиционные и одно-позиционный, типа кнопки. Cейчас времена богатые, и 16 каналов это норма, поэтому на тумблеры вешают: режимы - акро, стаб, 3D; звук от пищалки и\или моторов, чтобы найти квад в траве; режим "черепахи" - когда квад упал на спину, вращение пропов в обратную сторону помогает его перевернуть; у меня ещё тумблер настроен на преарм, то есть чтобы "заармить" квад, мне нужно зажать один тумблер (пре-арм) и взвести второй (арм). Настроил себе после того как пузом заармил квад в руках и тот поранил мне руку. Есть квад со второй курсовой камерой смотрящей назад - переключение по тумблеру (с инвертом стиков).
Зачем экран?
Экран не нужен, мы же сразу очки натягиваем =) Аппаратура максимально универсальная работает на открытой прошивке EdgeTX - это ответвление некогда безумно популярной OpenTX и требование этой системы - наличие экрана, так как настраивать всё многообразие параметров... можно через компьютер! EdgeTX Companion программа для ПК, которая новичку, наверное, не к чему, но если у вас куча дронов, самолётов и вертолётов, то без Companion будет тяжело. Начальные настройки удобно сделать на экране. Также на экран во время полёта можно выводить любые параметры телеметрии и, теоретически, при отказе видео, если грамотно настроить, квад можно вернуть по приборам.
На сколько бьёт?
Согласно достоверным источникам (OscarLiang), ERLS на 2.4ГГц при мощности передатчика 100мВт может дать 33 километра. Это на двести процентов перебьёт дальность вашего видеоканала. Но это не означает, что не нужно настраивать Failsafe - режим отказа радиоканала. В нашем деле при отказе радиоканала настраивается отключение моторов с неизбежным падением - это самый безопасный вариант.
Есть же ещё внешние модули!
В аппаратуре помимо внутреннего радиомодуля (в нашем случае стандарта ExpressLRS) есть разъём для внешнего. То есть вы можете сменить радиопротокол не меняя аппы, просто докупив нужный модуль и сменив приёмник в дроне. Это оставляет место для манёвра в случае чего, и позволяет, например, установить ExpressLRS в устаревшую аппу.
А что по барахолке?
Слова FrSky, FlySky и Taranis можно забыть, эпоха ушла, приёмники в продаже ещё есть, но если строить флот с нуля, ExpressRLS - вариант с перспективами. Связка открытых EdgeTX и ERLS выигрывает у любых других сочетаний по перспективам поддержки, даже у Team Black Sheep суперпопулярный протокол Crossfire работает на аппах под управление FreedomTX - ответвлением всё того же OpenTX и они клянутся влиться в EdgeTX вот прям на днях.
Итог:
Любая рекомендованная выше аппаратура имеет современную прошивку EdgeTX, современный радиопротокол ExpressLRS с отличной дальностью и поддержкой других протоколов с помощью внешнего модуля, а также подключается к компу по USB в качестве джойстика.
P.S.: Я намерено пропустил подробности о: FrSky, FlySky, Taranis, Futaba, Graupner, Crossfire, Tracer, Ghost, Mamba, Tango, OpenTX, 915/868МГц системы и много чего ещё по теме, новичку без этой информации будет жить проще.



